稳定平台
§3.3 陀螺稳定平台

§3.3 陀螺稳定平台1、问题的提出如果能测量出沿直角坐标系三个轴的线运动和绕三个坐标轴的角运动,就可以确定出物体的运动状态。
飞机、舰船以及各种战略战术武器都用惯性导航、惯性制导系统测量出运载体的位置、速度及姿态等运动情况。
如测量线运动用加速度计,测量角运动用陀螺仪。
下图就是由三个二自由度陀螺和三个单轴加速度计组成的全姿态惯性测量组合(IMU)。
三个二自由度陀螺仪分别检测或稳定三个轴的角运动,三个单轴加速度计检测沿三个轴的加速度(线运动)。
一个二自由度陀螺相当于两个单自由度的陀螺,所以也有用两个二自由度陀螺仪代替三个单自由度陀螺仪的,多余的一根陀螺仪测量轴,可以用锁定回路进行锁定。
图 全姿态惯性测量组合示意图根据IMU选择的坐标系,就构成了各种不同方案的惯性导航系统。
平台式惯性导航系统把IMU稳定在导航坐标系里,与运动的载体相隔离,而捷联式方案是把IMU固定在载体上。
平台式惯导系统的做法:为了把IMU与载体相隔离,所以用一套框架系统把IMU支承起来(跟付科模型类似)。
使IMU成为在载体上不受载体运动与载体相隔离,所以用一套框架系统把IMU支承起来。
使IMU成为在载体上不受载体运动影响的—个物理平台。
图 三轴稳定平台的结构示意图在上图中A即是由陀螺和加速度计组成的测量部件IMU,是平台台体,平台用垂直的一个内环B支承起来,平台与内环间可以作360度的相对转动。
内环支承在水平的外环C中,内环连同平台可绕水平的X轴相对外环转动。
外环水平地支承在载体上,内外环及平台一起p可以绕水平的Y轴相对于载体转动。
在惯性平台稳定工作时,实际的p平台与载体的相对运动情况正好相反,载体无论绕方位轴转动还是横滚、俯仰,平台始终稳定跟踪某一导航坐标系。
平台三个支承轴的转角就可测量出载体的航向和水平姿态角。
把平台的外框轴沿载体的纵向轴安装,如图在船上的安装,则垂直的Z轴测航向,p X轴测纵摇,pY测横摇。
各支承轴上装上测角传感器就测量出了载体的航向和水平p姿态信号。
一种舰载伺服稳定平台的结构设计
2021年第1期网址: 电邮:*******************一种舰载伺服稳定平台的结构设计毛雨辉,张进(光学辐射重点实验室,北京100854)图3方位轴三维视图陀螺转盘轴承码盘惯导蜗杆副轴承对滑环图4方位轴剖视图引言本文设计一种舰载的伺服稳定平台结构,如图1所示。
该平台可将负载加装于伺服平台并完成指向精度标校的功能,在船体航行和系泊状态下可隔离船摇影响、稳定负载指向功能[1]。
该伺服平台采用地平式双轴转台的结构。
考虑到负载偏心力矩及风载荷等特点,稳定平台的方位和俯仰轴系均采用大型蜗轮蜗杆副作为末级传动,进口高精度行星齿轮减速器作为初级传动,具有较高的结构刚度和可靠性,保证了负载指向、跟踪精度和总体结构的回转稳定性。
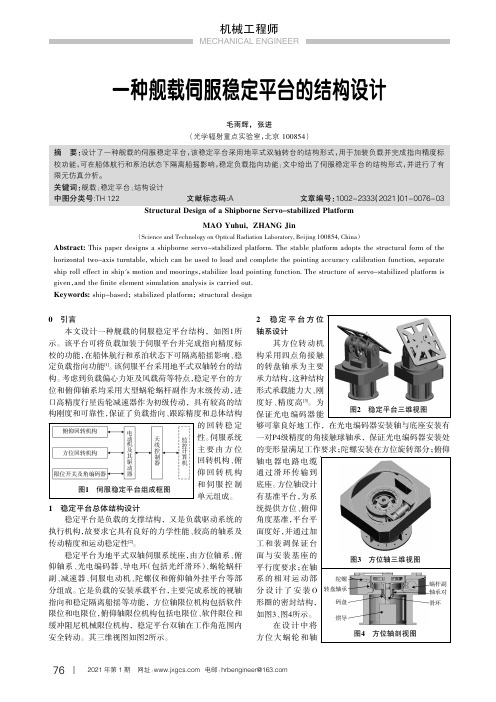
伺服系统主要由方位回转机构、俯仰回转机构和伺服控制单元组成。
1稳定平台总体结构设计稳定平台是负载的支撑结构,又是负载驱动系统的执行机构,故要求它具有良好的力学性能、较高的轴系及传动精度和运动稳定性[2]。
稳定平台为地平式双轴伺服系统座,由方位轴系、俯仰轴系、光电编码器、导电环(包括光纤滑环)、蜗轮蜗杆副、减速器、伺服电动机、陀螺仪和俯仰轴外挂平台等部分组成。
它是负载的安装承载平台,主要完成系统的视轴指向和稳定隔离船摇等功能,方位轴限位机构包括软件限位和电限位,俯仰轴限位机构包括电限位、软件限位和缓冲阻尼机械限位机构,稳定平台双轴在工作角范围内安全转动。
其三维视图如图2所示。
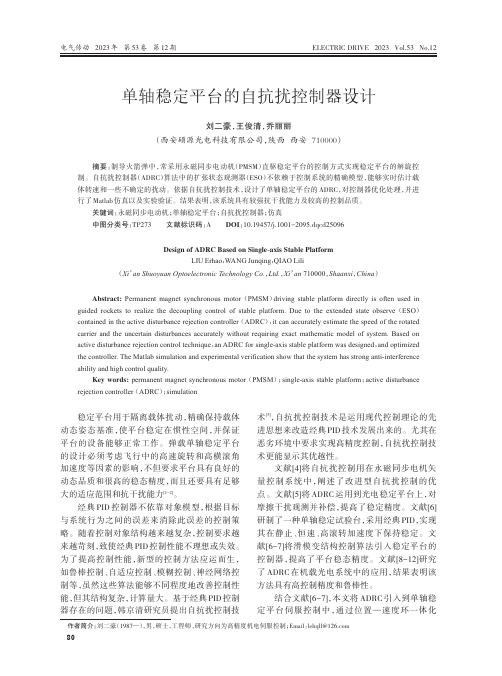
2稳定平台方位轴系设计其方位转动机构采用四点角接触的转盘轴承为主要承力结构,这种结构形式承载能力大、刚度好、精度高[3]。
为保证光电编码器能够可靠良好地工作,在光电编码器安装轴与底座安装有一对P4级精度的角接触球轴承,保证光电编码器安装处的变形量满足工作要求;陀螺安装在方位旋转部分;俯仰轴电器电路电缆通过滑环传输到底座。
方位轴设计有基准平台,为系统提供方位、俯仰角度基准,平台平面度好,并通过加工和装调保证台面与安装基座的平行度要求;在轴系的相对运动部分设计了安装O 如图3、图4所示。
单轴稳定平台的自抗扰控制器设计
电气传动2023年第53卷第12期ELECTRIC DRIVE 2023Vol.53No.12摘要:制导火箭弹中,常采用永磁同步电动机(PMSM )直驱稳定平台的控制方式实现稳定平台的解旋控制。
自抗扰控制器(ADRC )算法中的扩张状态观测器(ESO )不依赖于控制系统的精确模型,能够实时估计载体转速和一些不确定的扰动。
依据自抗扰控制技术,设计了单轴稳定平台的ADRC ,对控制器优化处理,并进行了Matlab 仿真以及实验验证。
结果表明,该系统具有较强抗干扰能力及较高的控制品质。
关键词:永磁同步电动机;单轴稳定平台;自抗扰控制器;仿真中图分类号:TP273文献标识码:ADOI :10.19457/j.1001-2095.dqcd25096Design of ADRC Based on Single -axis Stable PlatformLIU Erhao ,WANG Junqing ,QIAO Lili(Xi ’an Shuoyuan Optoelectronic Technology Co.,Ltd.,Xi ’an 710000,Shaanxi ,China )Abstract:Permanent magnet synchronous motor (PMSM )driving stable platform directly is often used in guided rockets to realize the decoupling control of stable platform.Due to the extended state observe (ESO )contained in the active disturbance rejection controller (ADRC ),it can accurately estimate the speed of the rotated carrier and the uncertain disturbances accurately without requiring exact mathematic model of system.Based on active disturbance rejection control technique ,an ADRC for single-axis stable platform was designed ,and optimized the controller.The Matlab simulation and experimental verification show that the system has strong anti-interference ability and high control quality.Key words:permanent magnet synchronous motor (PMSM );single-axis stable platform ;active disturbance rejection controller (ADRC );simulation作者简介:刘二豪(1987—),男,硕士,工程师,研究方向为高精度机电伺服控制;Email :单轴稳定平台的自抗扰控制器设计刘二豪,王俊清,乔丽丽(西安硕源光电科技有限公司,陕西西安710000)稳定平台用于隔离载体扰动,精确保持载体动态姿态基准,使平台稳定在惯性空间,并保证平台的设备能够正常工作。
稳定平台中陀螺漂移自适应实时估计算法_张智永

9] 图 2 陀螺稳定平台伺服控制系统结构 [
r o l a t f o r m9 F i . 2 S t r u c t u r e o f s e r v o c o n t r o l s s t e m o f s t a b i l i z e d - - g y p g y
[ ] 3 7 -
, 进行了广泛的研究并取得一定的效
果 。 但就稳定平 台 漂 移 补 偿 而 言 , 还存在如下问 题: 如 低 通 滤 波、 卡尔曼滤 ① 各类信号处理手段, 波、 前向线性预测滤波( F o r w a r d L i n e a r P r e d i c - , 、 小 波 滤 波, 均是抑制陀螺噪声 t i o n F i l t e r F L P) , 的中高频信号 对补偿陀螺常值漂移作用不大 ; ② 从短期来看 , 陀螺常值漂移为固定随机数 , 但长期
。 陀螺作为稳定平台核心测量元件 , 其误
差对平台性能有 很 大 影 响 , 如陀螺常值漂移会造 陀螺相关漂移会 成平台漂移随时 间 呈 线 性 增 长 , 造成平台漂移的随机游走 。 而平台漂移会带来图 像的 扰 动 , 进而造成目标搜索、 捕 获、 跟踪和瞄准 因此必须对陀螺误差进行补偿 。 的困难 , 国内外专家学 者 针 对 陀 螺 误 差 的 分 析 、 建模 和补偿
J u n . 2 5 2 0 1 2V o l . 3 3N o . 6 1 0 4 4 1 0 5 1 - / I S S N 1 0 0 0 6 8 9 3 N 1 1 1 9 2 9 V - C -
稳定平台中陀螺漂移自适应实时估计算法
张智永 * ,周晓尧 ,范大鹏
国防科学技术大学 机电工程与自动化学院 ,湖南 长沙 4 1 0 0 7 3
火控系统稳定平台设计与仿真分析

火控系统稳定平台设计与仿真分析火控系统是指用于控制武器系统的一种系统,主要用于控制、指导和管理火炮、导弹等武器的射击与攻击。
如今,随着科技的发展和战争形态的变化,火控系统在现代军事中发挥着越来越重要的作用。
本文将就火控系统稳定平台的设计与仿真分析进行探讨。
首先,稳定平台是火控系统中的重要组成部分,其设计直接关系到火控系统的性能和稳定性。
稳定平台的作用是使火炮、导弹等武器能够在运动状态下保持稳定,确保射击精度和命中率。
稳定平台的设计需要考虑多种因素,包括结构强度、稳定性、抗震性能等。
另外,稳定平台还需要与其他火控系统组件进行协同工作,如传感器、控制系统等。
稳定平台的设计与仿真分析是一种有效的方法,可以通过模拟实际情况,评估设计的稳定平台在不同工况下的性能表现。
仿真分析可以通过计算机模型和数学模型,模拟火控系统在各种环境下的运动状态、振动变化等。
通过对稳定平台的仿真分析,可以优化设计,提高稳定性和抗干扰能力。
稳定平台的设计与仿真分析需要考虑多种因素,包括平台结构、传感器安装位置、控制和调节机构等。
首先,平台的结构设计应考虑载荷的分布和传递,以确保整个系统的稳定性和强度。
传感器的安装位置也需精确计算,以保证传感器能够获取准确的数据,并及时反馈给控制系统进行调节。
其次,控制和调节机构的设计与仿真分析也是关键。
控制系统需要能够实时感知平台的姿态变化,并通过控制和调节机构对平台进行稳定控制。
仿真分析可以模拟平台在不同姿态下的动态响应,进而评估控制系统的性能和稳定性。
通过仿真分析,可以对控制系统的参数进行优化,提高系统的控制精度和稳定性。
另外,稳定平台的仿真分析还可以对火控系统的整体性能进行评估。
通过模拟射击和攻击过程,可以分析火炮、导弹等武器的精度和命中率,并优化设计以提高射击精度和命中率。
此外,仿真还可以模拟不同环境条件下的干扰,评估火控系统对干扰的响应能力,从而提高系统的抗干扰能力。
总结起来,火控系统稳定平台的设计与仿真分析是一项复杂而重要的工作。
INS理论与技术05

INS理论与应用 理论与应用 5.惯性元件与稳定平台 惯性元件与稳定平台
转子陀螺的力学原理 转子陀螺的力学原理就是动量矩定理: 转子陀螺的力学原理就是动量矩定理:
dH dt
i
=M
式中, 为定点转动质点系对该定点的角动 式中,H为定点转动质点系对该定点的角动 量总和, 为作用在该质点系上对该定点的 量总和,M为作用在该质点系上对该定点的 合外力矩, 合外力矩,dH/dt|i表示在惯性坐标系内观察 到的时间变化率。 到的时间变化率。
INS理论与应用 理论与应用 5.惯性元件与稳定平台 惯性元件与稳定平台
陀螺的表观运动 如果把陀螺放置在地球的赤道 地区, 地区,开始时它的转动轴垂直 向上。 向上。 由于地球每昼夜自转一周的缘 经过6小时后 小时后, 故,经过 小时后,陀螺的转动 轴将处于水平位置(人站在地平 轴将处于水平位置 人站在地平 面上观察), 面上观察 ,经过 12小时后转动 小时后转动 轴恢复至垂直位置, 轴恢复至垂直位置,但是头部 和底部颠倒了过来。 小时后 和底部颠倒了过来。24小时后 恢复到初始位置。 恢复到初始位置。
进动性是双自由度陀螺 仪的又一个基本特性。 仪的又一个基本特性。 当绕内框架轴作用外力 矩时, 矩时,将使高速旋转的 转子自转轴产生绕外框 架轴的进动; 架轴的进动;而绕外框 架轴作用外力矩时, 架轴作用外力矩时,将 使转子轴产生绕内框架 轴的进动。 轴的进动。
INS理论与应用 理论与应用 5.惯性元件与稳定平台 惯性元件与稳定平台
INS理论与应用 理论与应用 5.惯性元件与稳定平台 惯性元件与稳定平台
陀螺所具有的定轴性的强弱除与它的转动惯 量有关以外,还与它的转动角速度有关。 量有关以外,还与它的转动角速度有关。 在力学中,常用动量矩H(也称为陀螺仪的角 在力学中,常用动量矩 也称为陀螺仪的角 动量)来表示转动惯量 来表示转动惯量J与角速度 的乘积, 动量 来表示转动惯量 与角速度 的乘积, 即H=J 。 H是矢量,方向与角速度的方向一致。 是矢量, 是矢量 方向与角速度的方向一致。 公式说明,转动惯量和角速度愈大, 公式说明,转动惯量和角速度愈大,动量矩 就愈大。动量矩愈大,陀螺的定轴性就愈好。 就愈大。动量矩愈大,陀螺的定轴性就愈好。 动量矩H是陀螺仪的一个重要参数。 是陀螺仪的一个重要参数。 是陀螺仪的一个重要参数
船舶稳定平台解决方案

船舶稳定平台解决方案陀螺稳定平台〔gyroscope-stabilized platform〕利用陀螺仪特性保持平台台体方位稳定的装置。
简称陀螺平台、惯性平台。
用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。
它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。
稳定平台作为一种安放在运动物体上的设备,具有隔离运动物体扰动的功能。
稳定平台在航空航天、工业控制、军用及商用船舶中都有比拟广泛的用途,例如航拍、舰载导弹发射台、船载卫星接收天线等。
船舶上工作面或者平台姿态检测,船载天线稳定平台系统,会应用倾角传感器定时〔较长时间〕读取数值,通过计算后,对稳定平台进展校正。
平台的实际运动由单片机控制外部机械装置以到达对稳定水平平台进展修正,以保证其始终处于水平状态。
某些倾角传感器作为船体液压调平系统中的反响元件,提供高精度的倾角信号。
既可用于水下钻进也可用于水下开采等。
在国外,陀螺稳定跟踪装置被广泛应用于地基、车载、舰载、机载、弹载以及各种航天设备中。
20世纪40年代末,为了减少车体振动对行进间射击的影响,在坦克上开场安装火炮稳定器,从50年代起,双稳定器在坦克中得到了广泛的应用。
在英、美等国的先进武器系统中,基于微惯性传感器的稳定跟踪平台得到了广泛的应用,如美国的M1坦克、英国“挑战者〞坦克、俄罗斯T-82坦克、英国“标枪〞导弹海上发射平台和“海枭〞船用红外跟踪稳定平台等,都采用了不同类型的稳定跟踪平台。
美国海军采用BEI电子公司生产的QRS-10型石英音叉陀螺,研制出WSC-6型卫星通讯系统的舰载天线稳定系统,工作12万小时尚未出现故障;Honeywell公司以红外传感器平台稳定为应用背景,研制的以GG1320环形激光陀螺为根底的惯性姿态控制装置,很好的满足了稳瞄跟踪系统的要求。
美军配装的Honeywell公司采用激光陀螺技术研制的自行榴弹炮组件式方位位置惯性系统(MAPS6000) ,在工作时可连续提供高精度的方位基准、高程、纵摇、横摇、角速率、经度和纬度输出,性能大大高于美军MAPS系统标准的要求。
光电稳定平台框架结构探讨

关键 词 :光 电侦 察 稳 定 平 台 ; 瞄 准台 中 图分 类 号 :T 7 5 H 4 文 献标 识 码 :A
DOI: 1 .78 / EI2 28 3 0 3 0 3 80M 01 1 0 .03
S u y o …一 tu t r s o i b l f rElc r — p ia c n as a c a f r t d n Mu S r c u e fG m as o e t o t l o c Re o n is n e PIt m O
XUE Da n
21 双轴二框 架稳定平台系统 . 双轴二框架结构是航空 侦察平 台中使用 最多 的
一
身轴系的旋转变化稳 定, 即不能保证探测器 得到的图
像相对于惯性坐标系是稳定 的, 直接影响跟踪系统 的 平稳性及动态跟 踪精度 。同时由于飞机 姿态摇摆 幅 度及摇摆方 向的随机性, 同时刻 、不同位 置成像平 不
等,依据稳定精度 、 搜索 范围的要求而定l l _ 。本文主要
分析上述 几种平 台框架形式 的特点。
www om
.
en if o
.
1 . v 14 . . -
。 I . . J1 工
c | 3 o m 3
—
—
—
—
第2卷 8
第3 期
Vo. No. 128 3
2 稳定 平 台系统分 析
置于相互正交 的俯 仰 、方位两个框 架组成 的平台上
( 图 1所示), 如 通过陀螺 敏感平 台相对惯 性空 间运 动 ,然后经陀螺稳定回路驱动框架力矩 电机 克服外 界干扰力矩, 到稳定 目的。这种两框架平 台是一种 达
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺稳定平台
gyrostabilization unit;绕支点作三自由度转动,而绕其中一个轴作高速转动的刚体,统称为陀螺。
工程技术中实际应用的陀螺,一般由内,外两个框架、基本陀螺以及修正装置等组成。
基本陀螺有两个主要特性:定轴性和进动性。
应用陀螺的这两个特性制造出—系列仪表,供在空中、水上、水下和陆地,上运动的物体指示方向。
海空重力测量就利用垂直陀螺仪表来指示船舰、飞机的重力方向,以控制重力仪轴向与重力方向一致,消除干扰加速度的影响。
垂直陀螺仪是—种简单的两由度陀螺仪表,其精度是不高的。
应用自动控制技术将陀螺、角度转换器、放大器及校正网路和执行机构等部件组成—个力平彻式闭路系统,以自动修正方向。
这种使用单自由度陀螺并加力平衡式反馈迥路的系统称为稳定平台。
它的构造比陀螺仪复杂,但性能却要好得多。
海洋重力仪最好与陀螺稳定平台配套,以提高海上测量的精确度。
Innalabs陀螺仪特别为动态环境下测量垂直安装面的角速率设计。
陀螺仪利用先进科氏振动技术测量绕敏感轴的绝对角速率。
零偏稳定性:0.1 °/h;随机游走: 0.003 °/√h。
特点
∙高性能漂移稳定性
∙噪声低
∙重量轻
∙寿命长,稳定性强
∙价格优惠
∙卓越振动性能
主要应用
∙导航控制系统
∙平台稳定。