固定翼航模有哪些设备组成
固定翼飞行原理,硬件介绍以及制作指导
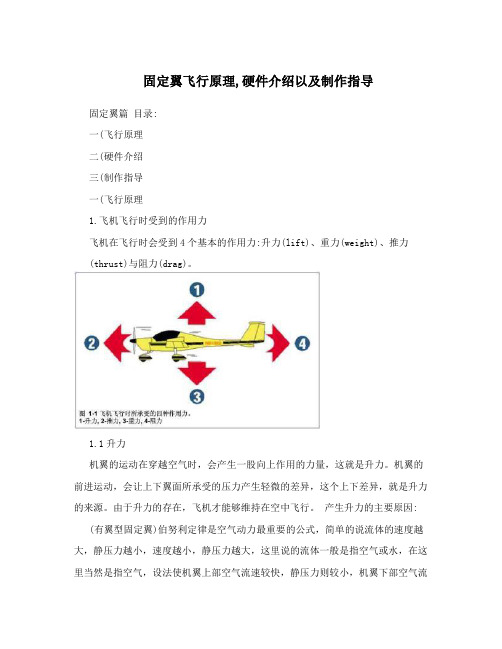
固定翼飞行原理,硬件介绍以及制作指导固定翼篇目录:一(飞行原理二(硬件介绍三(制作指导一(飞行原理1.飞机飞行时受到的作用力飞机在飞行时会受到4个基本的作用力:升力(lift)、重力(weight)、推力(thrust)与阻力(drag)。
1.1升力机翼的运动在穿越空气时,会产生一股向上作用的力量,这就是升力。
机翼的前进运动,会让上下翼面所承受的压力产生轻微的差异,这个上下差异,就是升力的来源。
由于升力的存在,飞机才能够维持在空中飞行。
产生升力的主要原因: (有翼型固定翼)伯努利定律是空气动力最重要的公式,简单的说流体的速度越大,静压力越小,速度越小,静压力越大,这里说的流体一般是指空气或水,在这里当然是指空气,设法使机翼上部空气流速较快,静压力则较小,机翼下部空气流速较慢,静压力较大,两边互相较力,于是机翼就被往上推去,然后飞机就飞起来,以前的理论认为两个相邻的空气质点同时由机翼的前端往后走,一个流经机翼的上缘,另一个流经机翼的下缘,两个质点应在机翼的后端相会合,经过仔细的计算后发觉如依上述理论,上缘的流速不够大,机翼应该无法产生那么大的升力,现在经风洞实验已证实,两个相邻空气的质点流经机翼上缘的质点会比流经机翼的下缘质点先到达后缘。
(平板固定翼)攻角(迎角): 当飞机的机翼为对称形状,气流沿着机翼对称轴流动时,由于机翼两个表面的形状一样,因而气流速度一样,所产生的压力也一样,此时机翼不产生升力。
但是当对称机翼以一定的倾斜角(称为攻角或迎角)在空气中运动时,就会出现与非对称机翼类似的流动现象,使得上下表面的压力不一致,从而也会产生升力。
1.2重力重力是向下的作用力。
由于飞行员可以决定飞机的载重大小,所以某种程度上,你可以说这是人为可以控制的力量。
除了燃料随着旅程慢慢消耗之外,飞机的实际重量在航程中不大容易变动。
在等速飞行中(飞机的速度与方向保持一定不变),升力与重力维持着某种平衡。
1.3推力和阻力引擎驱动螺旋桨后,所产生的前进力量就是推力。
航模基础知识要点

航模基础知识要点航模基础知识要点一、航模的组成航模一般由动力源、螺旋桨、安定器、电池、遥控器等其他配件组成。
1、动力源:航模的动力源主要分为两种,一种是燃油发动机,一种是电动机。
燃油发动机航模的优点是马力大,不需要电源,飞行时间长,但需要燃烧汽油,有污染。
电动机航模的优点是噪音小,马力大,环保,但飞行时间短。
2、螺旋桨:螺旋桨是航模飞行的直接动力部分,通过旋转产生升力,推动航模飞行。
根据飞行需要,可选择不同规格的螺旋桨。
3、安定器:安定器是航模的重要配件,主要作用是稳定航模飞行,减少航模的摇晃和旋转。
4、电池:电池是航模的能源来源,一般使用聚合物锂电池。
电池的容量和放电倍率会影响航模的飞行时间和性能。
5、遥控器:遥控器是操纵航模的设备,通过遥控器上的操纵杆和控制按钮,飞行员可以控制航模的飞行方向、高度、速度等。
二、航模的性能航模的性能主要分为三种:最大飞行速度、最大爬升率、最大下降率。
1、最大飞行速度:指航模在正常飞行条件下所能达到的最大速度。
2、最大爬升率:指航模在最大推力条件下所能达到的最大爬升速度。
3、最大下降率:指航模在最大推力条件下所能达到的最大下降速度。
三、航模的飞行环境航模的飞行环境对其飞行性能有很大影响,因此飞行员需要了解航模的最佳飞行环境。
1、高度:航模的飞行高度受到空气密度、温度、气压等因素的影响,一般适合在1000米以下飞行。
2、气象条件:航模一般适合在晴朗、无风的天气飞行,风速一般不超过10米/秒。
大风、暴雨、雷电等恶劣天气不适合飞行。
3、地形:航模的飞行场地需要选择平坦、开阔、无障碍物的地形,以保证航模的安全飞行。
四、航模的操纵技巧操纵航模需要有一定的技巧和经验,以下是几个重要的操纵技巧:1、控制油门:油门是控制发动机或电机的转速,通过控制油门的大小,可以控制航模的飞行速度和高度。
2、控制姿态:通过控制遥控器的操纵杆,可以控制航模的姿态,如俯冲、爬升、侧滑等。
3、调整重心:航模的重心位置会影响航模的稳定性和操纵性,通过调整配重,可以调整航模的重心位置。
电动固定翼入门1

电动固定翼入门基础相信各位新手在入魔时都觉得头脑很乱,不知如何下手学习。
笔者就为各位新手模友把电动固定翼的入门基础知识较为系统的整理下来。
一电子设备篇作为第一步,首先要搞清楚自己需要怎样的电子设备以及如何搭配可以达到最佳效果。
一般的固定翼航模飞机所需的电子设备有遥控器(含接收机),电机,电子调速器,舵机,电池,附件有电量显示器,充电器等。
下面来具体讲解一下如何选择电子设备。
1.遥控器:遥控器是最重要的设备之一。
遥控器是一次性投资,建议一次性买个好控,也省了以后换控的麻烦。
个人觉得futaba,jr,hitec等大厂的控都不错,新手没必要用太多的通道,8通已经足够。
国产低端控还不错,例如天地飞,迪乐美,比较实用,性价比高。
但高端控还存在着一些问题,不建议购买。
在购买遥控器时最好顺便购买遥控器用锂电池,重心调节器,挂带,支架等附件。
配合起来使用效果会更加好。
如果有多架飞机,可以多准备几个接收机,这样就省去了换飞机是换接收机和调整的麻烦。
2.电机:电机的选用十分重要,直接影响到飞机的性能。
模型无刷电机分为内转子和外转子电机。
内转子电机转速高,扭矩小,常用于车船模型,外转子电机转速低,扭矩大,常用于飞机模型。
许多模友常常会认为kv值越高拉力越大,这是一个误区,kv值是每增加1伏电压时无刷电机空转转速所增加的转速值。
Kv值越高,转速越高,扭矩越小,所配的桨越小,常用于函道和后推机型。
Kv值越低,转速越低,扭矩越大,所配的桨越大,常用于前拉机型。
讲解一下电机的规格,以2212电机为例,22表示电机转子的直径,12表示转子的高度,2212表示该电机的转子直径是22mm ,高度是12mm。
对于小型固定翼,2208~2212规格的电机足以胜任。
建议大家使用大厂的电机,虽然价位稍高,但是省电,拉力大,发热小,损耗小,使用寿命更长。
杂牌电机虽然便宜,但偷工减料,使用寿命很短且性能不高。
3.电调:电子调速器与选配直接关系到电机的工作效率,分为带BEC和不带BEC的,BEC是一个降压装置,BEC全称为Battery EliminatorCircuitry,作用是将3s电源电压降至4.8v~6v后给接收机以及其他电子设备供电,一般的电子调速器都带有内置BEC,电调工作时的大部分热量都来自BEC。
固定翼航模机操作方法

固定翼航模机操作方法固定翼航模机是一种模拟真实飞行的模型飞机,它是由固定的机翼和舵面组成的,通过发动机产生的推力来提供飞行动力。
固定翼航模机操作方法需要一定的知识和技巧,下面将详细介绍固定翼航模机的操作方法。
1. 起飞前的准备在进行固定翼航模机的操作之前,首先需要对飞机和遥控器进行检查,确保所有部件都处于良好状态。
包括电池电量、遥控器连接状态、飞机发动机、舵面和起落架等,都需要进行检查并确保正常运作。
同时,需要选择合适的起飞场地,确保没有障碍物和人员在附近。
2. 起飞在进行起飞之前,需要将飞机放置在平整的跑道上,并确保飞机的舵面处于正确的位置。
然后,操纵遥控器,将油门拉至适当位置,让飞机加速并起飞。
在起飞过程中,需要注意保持飞机的稳定,并避免因为起飞速度过慢或姿态不正确导致的失速或坠机。
同时,要根据实际情况,调整飞机的舵面和油门,确保飞机可以顺利起飞并保持平稳飞行。
3. 空中飞行一旦飞机成功起飞,就需要进行空中飞行。
在空中飞行时,需要使用遥控器来操纵飞机的舵面,以控制飞机的姿态和方向。
通常,飞机的遥控器包括油门、方向舵、升降舵和副翼等部件,通过操纵这些部件,可以实现飞机的左右转向、上升和下降等动作。
在空中飞行时,需要根据实际情况,及时调整飞机的舵面和油门,以保持飞机的稳定飞行姿态。
4. 降落降落是固定翼航模机操作中最为关键的环节之一。
在进行降落之前,需要提前规划好降落路径,并确保在降落场地上没有障碍物。
在飞机接近降落点时,需要逐渐减小油门并控制飞机的姿态,以减速并保持飞机在适当的高度和姿态。
一旦飞机接近地面,需要逐渐减小油门并使用遥控器操纵飞机的舵面,以实现平稳的着陆。
同时,要注意风向和风力等外部因素对降落的影响,及时调整飞机的舵面和姿态,确保飞机可以安全着陆。
5. 安全操作在进行固定翼航模机的操作时,需要注意安全问题。
首先,需要确保飞行场地和周围环境安全,避免飞机与其他物体或人员发生碰撞。
其次,需要遵守航模机飞行的相关规定和法律法规,尊重他人的合法权益。
无人机技术基础 固定翼无人机结构
固定翼无人机的组成及各部分功用
(1) 机翼
机翼的主要功用是产生升力,以支持飞机在空中飞行,同时也起到一定的稳定和操作作用。
在机翼上一般安装有副翼和襟翼,操纵副翼可使飞机滚转,放下襟翼可使升力增大。
机翼上还可安装发动机、起落架和油箱等。
不同用途的飞机其机翼形状、大小也各有不同。
(2)机身
机身的主要功用是装载乘员、旅客、武器、货物和各种设备,将飞机的其他部件如:机翼、尾翼及发动机等连接成一个整体。
(3)尾翼
尾翼包括水平尾翼和垂直尾翼。
水平尾翼由固定的水平安定面和可动的升降舵组成,有的高速飞机将水平安定面和升降舵合为一体成为全动平尾。
垂直尾翼包括固定的垂直安定面和可动的方向舵。
尾翼的作用是操纵飞机俯仰和偏转,保证飞机能平稳飞行。
(4)起落装置
飞机的起落架大都由减震支柱和机轮组成,作用是起飞、着陆滑跑,地面滑行和停放时支撑飞机。
(5)动力装置
动力装置主要用来产生拉力和推力,使飞机前进。
飞机上除了这五个主要部分外,根据飞机操作和执行任务的需要,还装有各种仪表、通讯设备、领航设备、安全设备等其他设备。
固定翼航模简述

固定翼航模简述(一)航模不仅是一种运动更多的是制作与学习过程中的乐趣以及成功后的喜悦。
航空模型介绍一组成首先,航空模型分为五个基本的部分:1机头,2机翼,3机身,4发动机,5尾翼,6起落架二定义航空模型的定义:凡是1翼展小于5米;2带有或不带有动力装置;3不能载人;4密度大于空气的飞行器统成航空模型。
三原理①基本固定翼模型之所以能飞起来,是因为是因为机翼产生的升力。
机翼的横截面是流线型的,上弧的长度大于下弧的长度。
根据伯努力的流体压力差关系,流速越快受到的压强小,所以,机翼就在气流的作用下产生了一个向上的合力,这就是升力。
②翼型翼型分为五种:1,平板;2,平凸;3,凹凸;4,双凸;5,s型。
其中最后一种的升力最大。
③机身机身一般分为板身和仓身两种。
机身的作用主要是连接飞机各部分,调节尾力臂的长度。
尾力臂越长,升降舵和方向舵的舵效越好。
④尾翼尾翼最主要分为三大类:1垂尾平尾型;2 V型;3无尾翼型。
垂尾平尾型也叫T型,分为正T型倒T型,以及平尾在垂尾中间的三种情况。
根据垂尾的数量可分为单垂尾,双垂尾和多垂尾三种情况。
V型尾翼分为正V型和倒V型两种。
⑤舵面接下来介绍各种舵面的作用。
舵面主要有以下四种:副翼,襟翼,升降舵和方向舵。
在介绍各舵面的作用之前,我先说说模型飞机的三轴,横轴,纵轴,立轴。
纵轴是与机身的几何对称轴,穿过机身;横轴与纵轴垂直且穿过机翼的一条直线;立轴是与上述二者皆垂直的直线。
这三者交与一点,这一点就是模型飞机重力的合力点,即重心。
副翼:机翼后面可以上下运动且两侧差动的舵面;襟翼:机翼后面只能向下运动且两侧只能同向运动的舵面;升降舵:水平尾翼后面可以上下运动的舵面;方向舵:垂直尾翼后面可以左右摆动的舵面。
副翼的作用是使飞机绕纵轴做旋转运动;方向舵使飞机绕立轴做旋转运动,这个旋转运动与飞机向前的合速度即为转弯的实际速度方向;升降舵使飞机绕横轴做旋转运动;襟翼的作用是减速,也叫空气刹车。
固定翼无人机设计设备清单

固定翼无人机设计设备清单
固定翼无人机设计设备清单如下:
1. 电机:用于驱动飞机的螺旋桨。
2. ESC(电调器):用于控制电机转速和油门。
3. 电池:提供直流电源以供无人机运行。
4. 接收机:接收来自遥控器发射的指令。
5. 遥控器:控制无人机飞行的设备。
6. 飞控器:控制无人机姿态和飞行状态的主要设备。
7. 无线电发射机:用于将无人机状态和数据传输到地面站。
8. 地面站:用于接收和处理来自无人机的数据,并用于遥控飞行。
9. GPS模块:用于定位和飞行导航。
10. 视频传输设备:用于将无人机拍摄到的视频传输到地面站。
11. 螺旋桨:固定翼无人机通常需要2至4个螺旋桨用于飞行。
12. 机架:用于固定所有无人机设备的主要框架。
13. 飞行传感器:用于检测无人机飞行状态和姿态。
14. 相机:用于拍摄照片、视频或其他图像数据。
1.1固定翼无人机基本结构
Title
Works
About
Help
双垂尾型固定翼
无人机
固定翼无人机结构
尾翼
机翼
四大部分
机身
机身、机翼、尾翼、起落装置
动力装置
FIND
MORE
Title
Works
About
Help
起落装置
机翼
➢
机翼产生升力。
➢
机翼在飞机的稳定性和操纵性中扮演重要角色,机翼上安装
的可操纵翼面主要有副翼、襟翼、前缘襟翼、前缘缝翼。
➢
机翼还用于安装发动机、
无人直升机
无人多旋翼
垂直起降固定翼
无人飞艇
固定翼无人机平台
由动力装置产生前进的推力或拉力,由机体上固定的机翼
产生升力,在大气层内飞行的重于空气的无人航空器。
常见的固定翼平台
几种类型的无人机固定翼平台
常规布局固定翼
无人机
Title
Works
About
Help
倒“V”型固定
翼无人机
飞翼式固定翼
无人机
了减轻飞机重量,提高飞机的气动性能。
正“V”尾无人机
倒“V”尾无人机
双垂尾无人机
起降装置
起降装置的主要功用是支持飞机在地面停放,并用于飞机的起飞和降落
最常用的起降装置是起落架,根据起落架的不同安装方式可分为前三点和后三点飞机和滑橇式起落架。
前三点布局无人机
后三点布局无人机
滑撬式无人机
起降装置
其他起降装置还有滑撬式、弹射式、伞降式等
上单翼的好处是机身连接机翼的结构比有机翼穿
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
固定翼航模有哪些设备组成飞机要上天,肯定需要不少的设备。
需要什么设备?基本的电子设备包括:发射机、接收(含晶体)、发动机(电动或者油动)、舵机、电调、电池,以上设备缺一不可。
除了电子设备,还需要桨、舵角什么的,这里首先重点谈谈电子设备。
1、摇控设备
航模用的遥控设备包括发射机,接收机和一对晶体。
发射的作用是发射信号,让我们在地面通过它可以控制飞机飞行;接收机的作用则不言而喻,它是接收发射机发出的信号;晶体是让发射和接收在同样的频率下工作,不至于与其它发射接收冲突。
当你准备买遥控设备的时候,这三样设备一般是配套的,当然你也一定要向商家问清楚,因为有不少的商家卖的只是发射机。
遥控设备怎么选购,有什么要注意的方面?根据我的潜水,发现摇控设备不过就那么几样,国内的就更少了。
对于新手入门而言,从性价比考虑,我建议选择天地飞06A(即TDF 06A),这个是六通的,目前来说还没有发现假货。
06A性能不错,能满足入门甚至是高级飞行的需要,很多人都是用它,特别是新手。
TAOBAO上天地飞06A价格在250元左右,最便宜低至205元,我是两个月前买的,215元。
包含一个6通的发射机,6通的接收机,一对频率为72MHZ的晶体。
发射机和接收机都有通道这个最为重要的参数,通道即表示几个信号模式,一个通道相对应一个信号,这样说来比较抽象。
举个例子
讲:例如我们常常说的飘飘一般是三通的。
那么是用一通道用一个舵机控制副翼(或者一通道控制方向),二通道控制升升降,三通道通过油门控制电机电机转速。
所以新手入门做飞机,至少也是三通的。
上面讲到的TDF06A和论坛中一般谈的遥控是比例遥控,还有一种控是开关遥控。
这两种控有非常大的区别,价格也有相当大的差距,而且有本质的区别:以前者为基础的飞机可以称之为遥控模型;而以后者为基础的飞机只能叫遥控玩具。
那么什么是比例遥控,形象的说,比例遥控控制某个通道,可以模拟真实的机械操作,比如以控制油门为例,就是大点,再大点,再大一点......最大;小点,再小点,再小一点......最小。
控制其它通道也类似。
而开关遥控则不行。
开关遥控的一个通道只能是开—关。
类似电灯的开关,无法以比例控制通道。
在TAOBAO上有很多200以下的遥控飞机(滑翔机)就是这种开关控。
再来谈谈遥控设备用的晶体。
晶体是一对进行工作,发射机和接收机晶体的频率必须一样,才能在同频率下工作。
例如发射上面的晶体是72.310MHZ,那么接收上面也必须插有72.310MHZ的晶体才行。
如果接收上面是72.180,那么显然发射不能控制这个接收。
在买遥控设备时,发射接收上面的晶体都是配好了,这个就不用担心了。
有的遥控设备没有晶体,比如2.4G的遥控设备,那么此类设备是如何保证两个以上的相同设备在同样的地方进行工作?因为2.4G 虽然全部是同频的,采用的是码分而不是频分,从理论上讲是不会出现设备干扰的情况。
什么是码分呢?我不懂无线电,不是很清楚,但
我依稀记得三年前毕业后买的第一个CDMA手机,就是上了漂亮售机小姐的当,她说,CDMA是码分多址的哟,比GSM先进,大概讲得就是这个意思吧,嘿嘿。
2、电机
我不懂油动的发动机,我相信大多数刚入模的朋友也没打算买它,既然是电动版,我只说说电机。
航模用的电机目前有两种,有刷和无刷。
现在都流行用无刷,一是因为动力足,二是因为寿命长,三是因为效率高,四是因为也并不贵。
是目前的主流,所以这里也重点谈谈无刷电机。
无刷电机有三根线。
没有像有刷那样的一对电刷,故称无刷。
有刷电机有一对电刷,使用到一定次数,电刷就被磨损殆尽,于是得更换电刷。
无刷电机没有电刷,这是它寿命远大于有刷电机的主要原因。
无刷效率比有刷高,注意不是指无刷一定比有刷提供的动力强劲。
效率高指耗费同样的电力无刷比有刷能提供更大的动力。
有刷转动时可以不用电调设备,但无刷电机要工作,就必须配有电调,关于电调,下面会讲到。
无刷电机有什么2208,2408,2822,1806,这个参数不同的厂商是不一样的。
对于无刷而言,最为重要的参数就是KV值。
什么是KV,KV就是电机的转速(空载)=KV值*电压,一般而言KV值越大扭力就越小,KV值低扭力大。
所以KV值决定你配什么样的桨,因为大桨需要的扭力大,小桨需要的扭力小。
比如AX 1806N,KV 2100。
那么它在11.1伏电压下,转速(不带桨)就是2100*11.1=23310转每分钟。
KV2100在11.1伏下适合用5030桨。
可能你要问,那么我带8060桨可不可以?转不转得动?回答是不可以,转得动。
但你的电机和电调可能马上就要OVER!为什么?因为在这种情况下带动8060桨,需要更大的扭力,而转速越快,提供的扭力就小。
不要问为什么,可以用能量守恒定律来解决,具体可以看下关于此方面的帖子。
(这个问题有异议,请参考22楼回贴)
那么是不是KV2100在任何情况下都可以适合带5030桨呢?不是!如果电压高了,比如16.4伏情况下,转速就更高了,扭力会减小,桨需要更小的。
反之,电压低,7.4V,就可以用大点的桨。
有没有KV也高,扭力也高的电机,对于模型电机而言,没有!道理很简单,KV也高扭力也高需要更大直径和更长的铜线和更强的磁铁,转动需要更大的电流和电压,功率随之也就越大,电机将会更重,对于飞在天上的东西,重量是很重要的因素。
是不是相同的KV,不同的电机,配同样的桨拉(推)力是一样,理论是一样。
但由于做工和技术的原因,很可能不一样。
可能某厂商KV2100的电机比别一厂商KV2100的电机轻,扭力也稍大点。
但必不可能KV2100的电机比KV1000的电机扭力大!
所以,选电机就是选KV。
因为电机的KV决定你配什么样的飞机,选择什么型号的桨。
别外,重量也是选电机时要重点考虑的。
功率一样当然越轻越好!
新手入门选什么电机呢?建议选翱翔(AX)1806N(也称1818),这个电机KV有2100,2600,2900,建设选2100,因为据说KV2100的1806N,配5030桨,全油门工作电流也没越过7A,很省电。
拉(推)力超过300g,适合做后推或腰推的飘飘,纸飞机,SU-27,F22等。
别外,买这个电机配一般都送一个桨保护器,一个5030桨。
价格55元左右。
另外2208系列电机也是模友们经常用到的类型,从KV1000到KV2600都有,价格在50元左右。
3、电调
电调对应使用的电机不同,分无刷电调和有刷电调。
上面讲到,有刷电机转动时可以不用电调,但并不意味着,用有刷电机做模型飞机不用电调,因为没有电调,就无法控制电机工作进的转速。
可能有很多朋友跟我刚入门一样,想找身边的现成的设备做飞机,一是省钱;二是一般来讲小城市是买不到设备,只能网上买。
所以有很多帖子问可不可以用玩具车里面的电机作动力。
回答是:可以,只是动力不足。
即使是动力可以,你也得需要有刷电调,所以不要试图用有刷电机不用电调做航模。
上面还讲到,无刷电机工作必须要有电调,否则是不能转动的。
无刷电调有这样几个功能:一是提供无刷电机工作的低压交流电,电机才能转动;二是现在的无刷电调还有一个功能,那就是转换电池电压以供接收机工作。