一体化结构六维加速度传感器设计
并联式六维加速度传感器的研究
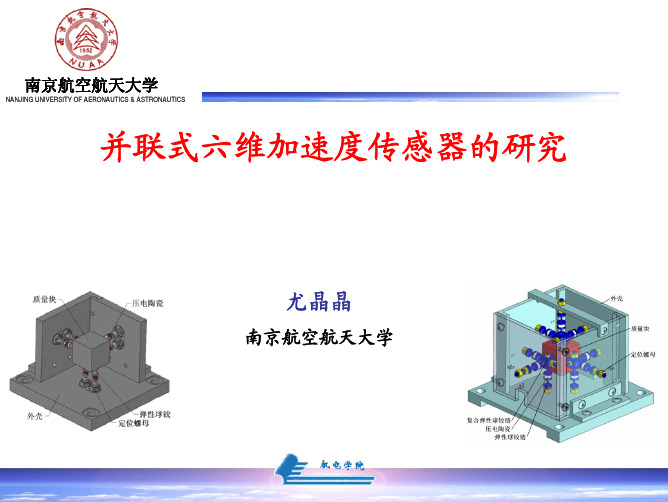
1 构型设计(六支链)
南航的构型
燕山大学的构型
南京航空航天大学
NANJING UNIVERSITY OF AERONAUTICS & ASTRONAUTICS
1 构型设计(九支链)
该项目获得2012年国家自然科学基金的资助
南京航空航天大学
NANJING UNIVERSITY OF AERONAUTICS & ASTRONAUTICS
⎞⎞⎞ ⎟ ( u +1) ⎟ ⎟ ⎟⎟⎟ ⎠⎠⎠
南京航空航天大学
NANJING UNIVERSITY OF AERONAUTICS & ASTRONAUTICS
3实验标定
南京航空航天大学
NANJING UNIVERSITY OF AERONAUTICS & ASTRONAUTICS
六维标定平台设计
尤晶晶 南京航空航天大学博士生 研究方向:并联机器人、六维加速度传感器 邮箱:youjingjing251010@
座右铭:老老实实做人,踏踏实实做事。 职业理想:做一名让学生喜欢的老师,让学 校骄傲的教授,让国家信任的科学家。
南京航空航天大学
NANJING UNIVERSITY OF AERONAUTICS & ASTRONAUTICS
并联式六维加速度传感器的研究来自尤晶晶南京航空航天大学
南京航空航天大学
NANJING UNIVERSITY OF AERONAUTICS & ASTRONAUTICS
0 研究现状
(2)坐标轴式六维加速度传感器
(1)立方块式六维加速度传感器
(3)并联式六维加速度传感器
尤晶晶,李成刚,吴洪涛.并联式六维加速度传感器的哈密顿动力学研究[J] 机械工程学报,2012,48(15):9-17.(EI检索:20124115554765)
并联结构六维加速度传感器研究的开题报告

并联结构六维加速度传感器研究的开题报告一、题目:并联结构六维加速度传感器研究二、研究背景及意义:光学六维加速度传感器是一种能够测量物体在六个方向(三个线加速度和三个角加速度)上的加速度的传感器。
在机械制造、航空航天、汽车等领域都有广泛的应用。
目前市场上已经有了许多六维加速度传感器,但其存在一些缺点,如测量范围较窄、精度不高等问题,不能完全满足实际应用需求,安装位置限制较大。
因此,本研究旨在设计一种基于并联结构的六维加速度传感器,以提高其测量范围和测量精度,并降低其安装位置的限制,使其能够更好地应用于实际场景中。
三、研究内容:1.设计并实现基于并联结构的六维加速度传感器原型。
2.基于MEMS技术实现传感器微机械结构的制备,提高传感器灵敏度和精度。
3.通过理论分析和实验研究比较传统六维加速度传感器和并联结构六维加速度传感器的性能优劣,包括数据精度、测量范围、安装位置合理性等。
4.对传感器的实验数据进行分析,显示其在工程应用中的实用性,以此对并联结构六维加速度传感器的优越性提出建议。
四、研究方法:本研究将采用理论分析、实验研究相结合的方法:采用模拟分析方法对传感器进行理论计算与建模,包括传感器个体元件的力学性能、并联结构的设计和控制算法制定等。
根据计算结果及实际需要,制备传感器微机械结构,并通过加速度阀值检测实验、位移及加速度的标定实验等进行系统验证。
在实验研究过程中,将分别对传感器在不同安装位置下的性能进行实验测试,并比较分析不同传感器系统的实用性。
五、研究预期结果:本研究将设计出基于并联结构的六维加速度传感器的原型,并经过检测证明其相较传统六维加速度传感器具有更高的测量精度和更广泛的测量范围。
同时,通过实验研究将验证其实用性,可以以此为依据为实际需要提供更为高效、便捷的加速度检测平台。
六、参考文献:1. Denghui Zhang, Wei Liu. Research on Six-axis Acceleration Sensor Based on Parallel Structure [J]. Journal of Beijing Institute of Technology, 2010.2. R. Togawa, J. Itani, M. Kaneko, T. Sasawaki, and Y. Kita. Development of a Six-Axis Accelerometer with a Parallel Mechanism Using Quartz Resonators [J]. Sensors, 2007.3. A. García-Márquez, R. Álvarez-Blanco, and A. Rodríguez-Castellanos. Design, Modeling, and Analysis of a New 6-Axis Accelerometer [J]. Sensors, 2012.。
六维力传感器的原理与设计复习过程
预紧式传感器的结构分析
修正后具有单一约束的球 副
预紧分支
大大降低了关节摩擦力矩的影响 减小了机械滞后现象
有中间预紧分支的预紧式传感器
预紧螺母
上平台 弹性分支 预紧支路 下平台
双层预紧式力传感器
中间预紧分支的结构相对比较复杂 施加预紧力比较困难
具有7分支的双层预紧式力传感器
双层预紧式力传感器
(1)测力平台;(2) 预紧平台;(3) 测量分支;(4)球窝; (5)下平台; (6) 球窝;(7)预紧螺栓;(8)基座
8分支上下层预紧式力传感器
(1) 测力平台; (2) 预紧平台; (3) 测量分支; (4) 球窝;(5) 预紧螺栓;(6) 基座
8分支左右预紧式力传感器
(1) 测力平台; (2) 左预紧平台; (3) 测量分支; (4) 右预紧平台; (5) 预紧螺栓。
加载面
实验研究
标准单维力传感 器
具有中间预紧分支的力传感器样机
单维力传 感器
导和 处理软件
六维力传感器的标定系统
测量误差
力/力矩分量
Fx Fy Fz Mx My Mz
测量误差
0.2% 0.4% 1.3% 0.1% 1.1% 0.4%
六维力/力矩传感器的应用
机械臂的末端感应器
触觉
微力的测量
六维力/力矩传感器有着很广泛的应用,如机械装配、
Dwarakanath et al. 的 六维力/力矩传感器
Nguyen et al. 的 六维力/力矩传感器
传统的Stewart 力传感器
优点
刚度大 结构紧凑 承载能力大 无累积误差 精度高 反解简单
传统的Stewart 力传感器 缺点
传统的采用球副
六维加速度传感器的模型设计

六维加速度传感器的模型设计
祁海群;李成刚;唐敦兵;尤晶晶;王宁;郭丽莎
【期刊名称】《机电一体化》
【年(卷),期】2011()10
【摘要】针对现有六维加速度传感器结构复杂、量程小等缺点,设计了一种基于冗余并联机构的弱耦合六维加速度传感器,其具有结构简单、精度高、量程大、解耦快等优点。
详细介绍了传感器的结构设计和解耦过程,对冗余并联机构、压电陶瓷和弹性球铰链的性能进行了分析。
通过Matlab仿真验证了实时测量的可行性及精确性,为六维加速度传感器的设计提供了一种新的思路。
【总页数】5页(P71-74)
【关键词】六维加速度传感器;冗余并联机构;压电陶瓷;弹性球铰链;实时测量
【作者】祁海群;李成刚;唐敦兵;尤晶晶;王宁;郭丽莎
【作者单位】南京航空航天大学机电学院
【正文语种】中文
【中图分类】TP212
【相关文献】
1.基于并联机构的六维加速度传感器的方案设计及建模研究 [J], 尤晶晶;李成刚;吴洪涛
2.六维加速度传感器的结构模型及虚拟仪器设计 [J], 尤晶晶;田苏辉;周为;王进;殷子臻
3.基于LabVIEW的六维加速度传感器测量系统设计 [J], 王宁;尤晶晶;李成刚;祁海群;郭丽莎
4.并联式六维加速度传感器动力学模型研究 [J], 李成刚;尤晶晶;吴洪涛
5.一种新型六维加速度传感器的结构设计与分析 [J], 许益明;赵现朝;高峰;张建政因版权原因,仅展示原文概要,查看原文内容请购买。
加速度场离心试验用一体化大量程六维力传感器的研制
a o h nn l m ng c a es, i ri c up ig o e ai n, i e t e e t o ln i t e c ee ain il a d h ipu/o t u neta o ln c mp ns to n ri a f c c up ig n h a c l r t fe d n t e n t u p t o
t he c l ain e rr marx dei e fo o t ai to ro ti rv d r m t ai r to ts o neta fe t nd he o ln ti t t i o br he c lb ai n e t f i ri e c a t c up ig marx wih he a d fa c lb a in y tm . Th ttc a d d na i x e i e a e u t n c t h tte l r e rng i a i o c e s r d sg d a ir to s se e sa i n y m c e p rm ntlr s ls idiae t a h a g a e sx—x sfr e s n o e ine by t rncp e he p i il me to e bo e n in d a v me t t d ma d o ts a c r c a sa iiy oa l i t c n rf g l c ee ai n e s he e n fr e t c u a y nd t blt ttly n he e tiu a a c lr to
第 3 2卷 第 9期
21 0 1年 9月
宇 航 学 报
J u n lo to a tc o r a fAsr n u is
Stewart六维力传感器优化设计

0 引 言
杆件 只承受沿 轴线 方 向的拉 力/ 压力( 在 不考 虑重 力和 各 球面副摩 擦力 矩 的情 况下 ) , 从而 可通过 检测 6个 弹性 杆 件的变形 实现对空间载荷测量。传感 器上下平 台的几何 中
( 陕 西 电器 研 究 所 , 陕西 西安 7 1 0 0 7 5 )
摘
要 :对 S t e w a t六维力传感器进行 了优化设计分析 , r 在有限元分析的基础上 , 通 过球头球 窝结构 、 十字
槽结 构以及圆环内嵌十字梁结构 等形 式 , 增强 了传感器整体 的抗耦能力 。同时 , 对优化前 后的传感 器进行
s t uc r t u r e . a n t i c o u p l i n g a b i l i t y o f s e n s o r i s s t r e n g t h e n e d . At t h e s a me t i me, e x p e r i me n t a l c o mp a r i s o n i s c a r r i e d o u t o n o p t i mi z e d a n d n o n — o p t i mi z e d s e n s o r . T h e s e n s o r ma x i mu m e r r o r i S r e d u c e d f r o m 3 . 2 8% t o 0 . 4 1% wi t h o n e
六维加速度传感器的结构模型及虚拟仪器设计分析
六维加速度传感器的结构模型及虚拟仪器设计分析摘要:六维加速度传感器在实际应用期间可能会出现信号失真问题,这一问题的出现会对式六维加速度传感器的性能和应用造成不良影响。
因此,人们在对六维加速度传感器进行分析过程中,针对其结构模型及虚拟仪器的具体设计情况进行详细分析,核心目的就是提高六维加速度传感器的性能,使其在后期应用过程中能过发挥出良好的作用,满足应用需求。
关键词:加速度传感器;结构模型;虚拟仪器;信号失真六维加速度传感器作为一种先进的设备,该项设备在虚拟现实、航空航天、机器人、医疗领域都有所应用,而且,从实际实际应用情况来看,通过合理方式对其进行应用,也将会取得了良好的应用效果。
但是,现阶段人们对于六维加速度传感器的研究还处于起步阶段,大量的科学问题都有待解决,因此,相关作业人员要做好相应的分析工作。
1 六维加速度传感器需要具备的优点六维加速度传感器需要具有的承载能力大、结构刚度大、精度高、动力学性能好、抗磁场干扰能力强等多项优点。
上述每一项有点都会对六维加速度传感器的性能和应用造成直接影响,因此,在实际设计过程中,要做好相应分析工作,保证最终设计出来的六维加速度传感器可以具备上述提到的各项优点[1]。
六维加速度传感器能够作为检测系统和控制系统的一项关键测量工具,其在体育、航天、医学等多个领域中都有着广泛应用,而要想使其在应用期间可以发挥出良好的性能,以及能够具有良好的应用前景,必须要对其设计内容进行全面分析,确保最终设计的合理性[2]。
2 预紧式并联六维加速度传感器分析该传感器在具体应用期间,外壳刚性固定在待测载上,让其载体一同进行变速运动,受惯性影响,质量块会使支链在应用期间的被压缩或拉伸,而受正电效应影响,在压电陶瓷两套会形成电荷,而且产生的电荷量的方向和大小都与待测加速度之间都有着紧密联系。
第一,设计人员要采用先进设备对电压陶瓷两端在运行期间需要的具体电荷量进行测量,获取到精准数值,完成测量后,要将数值合理的转变为支链变形量。
加速度场中六维力传感器研制
A b t ac :T e p r o e o h swo k wa o s l e t e i eta e f c n a c l r t n f l n me s r me t fsx d me s n s r t h u p s ft i r s t o v h n r fe ti c e e ai e d o a u e n i i n i s i o i o o
f r e Th e i n t o g to i i n i n o c e s rwi n e r t d p a t c u e wa u o wa d Th t cu a e i n a d o c . e d s h u h fsx d me so sf r e s n o t it g a e ln s u t r s p tf r r . e sr t r ld sg n g h r u a c lr t rc l r t n me h d o e s n o r n r d c d Th e i n d sx d me s n o c e s r a e h e o p e i c ee a o ai a i t o ft e s rwe e i t u e . e d s e i i n i s f r e s n o sc n g t e d c u ld sx b o h o g o t
装 备 环 境 工 程
・
第7 卷
第6 期
2 0・ 7
E UP N E V R N E T L E GN E I G Q IME T N IO M N A N IE RN
2 1年 1月 00 2
加速度场 中六维 力传感器研制
杨敏 申飞 ,
(. 1 中国工 程物理 研究 院 总体 工程研 究所 , 四川 绵 阳 6 1 0 ; 2 0 9 2 中国科学 院 智 能机械研 究所 , . 合肥 2 0 3 ) 301
加速度场中工作的六维力传感器软件设计
电 子 工 程
I F0R M ATI N N O AN D ELECTR ONI ENGI C NEERI C N
VO . NO 1 1 9, . Fe b., 01 2 1
文 章 编 号 :1 7 - 8 22 1) 10 9 - 5 6 22 9 ( 0 0 . 0 2 0 1
六维力传感器 是指用 于同时测量三维 力信息( , , ) , 和三维力矩 信息( ,
) 的一种传感 器 , 又称为
六分力传 感器 。六维力 测试技术 主要应用 于机器人腕力 测量 、风 洞试验 中试件边界 力测试 、汽车车轮受力测 试 、 飞 机 试 验 台 测 试 、火 箭 发 动 机 受 力 测 试 及 有 关 自动 控 制 系 统 中 。
关 键 词 : 六 维 力 传 感 器 ;加 速 度 场 ;测 量 软 件
中 图分 类 号 :T 0 N3 6 文 献 标 识 码 :A
S fwa ed sg fsx d me so o c a u ei e tiu e S ot r e i n o i — i n i nf r eme s r n c n rf g ’ a c l r to ed c e e a inf l i
加 速 度 场 中 工 作 的 六 维 力 传 感 器 软 件 设 计
董 洁 ,文 勇 ,洪 建 忠 ,聂 飞
( 国 丁 程 物 理 研 究 院 结 构 力 学 研 究 所 , 四 川 绵 阳 6 0 ) 中 I 21 0 9
摘 要 :六 维 力 传 感 器 处 于 加 速 度 场 中 ,其 自身 受 到 惯 性 载 荷 作 用 产 生 的力 信 号 和 被 测 试 件
f e d Ba i g n h f n a n a p i c p e o t e o c me s r m e t n t e o c a a y i o a il . s n o t e u d me t l r n i l s n h f r e a u e n a d h f r e n l s s f sx d m e s o a o c e s r i e tiu e a c l r to i l ,t i a e n r d c s a d c u i g me h d i i — i n i n lf r e s n o n c n rf g c e e a i n fe d h s p p r i to u e e o pln t o n t o c a u e n ,a d d v l p e f s fwa e f r m e s rn i - i n i n l f r e i e tiu e he f r e me s r me t n e e o s a s t o o t r o a u i g s x d me s o a o c n c n rf g a c l r to i l . s e u t a a i a e t le tv n s ft i o t r . c e e a i n fe d Te tr s lsh s v ld t he e f c i e e s o h s s fwa e Ke r s: s x d me s o a o c e s r c n rf g c e e a i n fe d; m e s r me ts fwa e y wo d i — i n i n l r e s n o ; e t iu e a c l r to i l f a u e n ot r
基于STM32的六轴智能传感车设计
基于STM32的六轴智能传感车设计一、引言近年来,随着科技的飞速发展,智能机器人已经成为了现实生活中的一部分,而智能传感车更是其中的一种典型代表。
智能传感车利用各种传感器和控制系统,能够实现自主导航、环境感知和智能控制等功能,具有广泛的应用前景。
基于STM32的六轴智能传感车设计就是其中之一,本文将对此进行详细介绍。
二、六轴智能传感车的设计原理1.传感器模块六轴智能传感车主要包括了加速度计、陀螺仪、磁力计、超声波传感器、红外线传感器等多种传感器模块。
这些传感器模块可以帮助传感车实现环境感知和定位导航等功能。
2.控制系统控制系统是传感车的核心,它主要由基于STM32的控制器、驱动电路和通信模块等组成。
控制系统能够根据传感器模块采集到的数据作出相应的决策,控制传感车的行进方向、速度与转向等。
3.动力系统动力系统是传感车的动力来源,它主要由电机、电池与电源管理模块等组成。
电机通过驱动电路控制,能够实现传感车的前进、后退、转向等动作。
三、基于STM32的六轴智能传感车设计方案1.硬件设计方案(1)主控制器的选择基于STM32系列的主控制器能够提供强大的计算能力和稳定的性能,适合作为六轴智能传感车的主控制器。
通过合理的选型,能够满足传感车的各种功能需求。
(2)传感器模块的选取在传感器模块的选取上,需要考虑到传感车的实际应用场景和需求,选择适合的加速度计、陀螺仪、磁力计、超声波传感器等多种传感器模块。
(3)驱动电路的设计为了实现电机的控制,需要设计合适的电机驱动电路,以确保传感车可以根据控制系统的命令准确地进行运动。
(4)电源管理模块传感车需要一个稳定的电源系统来保证其正常运行,因此需要设计合适的电源管理模块,确保传感车的各个模块都能得到稳定的电源供应。
2.软件设计方案(1)传感数据处理控制系统需要对传感器模块采集到的数据进行处理,进行滤波、数据校正等操作,以确保得到准确的环境信息。
(2)控制算法设计基于传感数据处理的结果,控制系统需要设计相应的控制算法,实现传感车的自主导航、环境感知和智能控制等功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这里给出的新型六维加速度传感器采用双膜片结
构, 通过将一个圆环形质量块实现各轴向惯性力和惯
性力矩的测量, 进而得到各轴向加速度和角加速度。其
结构示意图和有限元模型如图 1 所示。
212 弹性体的力学模型
B+ l]
(2)
式中: a, b, h 为圆环膜片的几何参数, 外半径、内半径
和厚度; F 为惯性力的等效集中力, 垂直于膜片平面。
则膜片上表面的应变:
Εr= -
h2dd2rΞ2 = -
3F (1- Λ2) 4ΠE h 2
2lnR - B -
ห้องสมุดไป่ตู้B R2
+
2
(3)
ΕΗ= -
h 2r
ddΞr =
-
3F (1- Λ2) 4ΠE h 2
1 引 言
2 多维加速度传感器原理及力学模型
如何从六维腕力传感器的信息中获取末端手爪与 外界环境的接触力是一个迫切需要解决的问题。 比较 有效的手段是检测出末端执行器的运动状态 (包括各 个方向的线加速度和角加速度)。
目前基于不同工作原理的多维微型加速度传感器 纷纷推出, 如压电式、压阻式、电容式和光纤位移式 等[1]。R. Puers 等设计了一体化的三维电容式微型加 速度传感器, 质量块固定在 4 个对称的横梁上, 形成了 4 个电容[2]。 K ijin Kw on 等利用整体微细加工与硅直 接粘合技术研制了一种一体化的三维压阻式微型加速 度传感器[3]。由于这些传感器研制成本高, 没有得到广 泛的应用, 另外, 也不能同时检测同一空间坐标系中运 动对象的角加速度。
这里提出一种新型结构的六维加速度传感器设 计, 其可实现空间坐标系中被测对象的三维线加速度 和三维角加速度。
2. 1 多维加速度传感器的基本工作原理
根据牛顿第二定律, 当质量块非匀速运动时, 在世
界坐标系中有惯性力:
F ( t) = M xβ(t)
(1)
式中: F ( t) = (Fx, Fy, Fz, M x, M y, M z) T , F 和 M 为各轴 向的惯性力和力矩分量; M 为质量矩阵, 其对角元素 为质量块的质量 m 和质量块的转动惯量 Ixx, Iyy, Izz; xβ
5 结 论
3 加速度传感器弹性体的有限元仿真分析
311 静力仿真分析结果 图 2 是 F 膜片的径向应变 Εr 分布云图, 沿 x 轴向
内 外 边 缘 附 近 是 应 变 最 大 的 区 域, 其 中 最 大 值 为 01343×10- 3, 而沿 y 轴向的应变则非常小, 沿半径的 最大值仅为 01487×10- 6, 约为 114‰。X, Y 方向加速 度变化影响对称。 在 az 加速度载荷作用下, 应变 Εr 沿 圆周分布相同, 是膜片内外边缘处应变最大, 最大值为 01637×10- 3, 但圆心两侧的半径上应变方向相同, 因 此通过适当的桥路连接, 也可以消除 z 轴向与 x 和 y 轴向间的维间耦合。
第 25 卷第 4 期增刊 仪 器 仪 表 学 报 2004 年 8 月
一体化结构六维加速度传感器设计Ξ
吴仲城 孟 明 申 飞 戈 瑜
(中国科学院合肥智能机械研究所传感技术国家重点实验室 合肥 230031)
摘要 提出了一种基于单惯性质量块的一体化结构六维多维加速度传感器设计, 介绍了传感器的工作原理, 采用有限元工具 对传感器静态和动态特性进行了分析, 给出了弹性体的应变分布、固有频率及振型等, 实验结果表明传感器的误差小于 1%。 关键词 六维加速度 弹性体 有限元分析
条件与传感器工作状态一致, 即采用 311 中的约束, 得
到前 6 阶固有频率和振型特征列于表 1 中。
表 1 弹性体固有频率和振型特征
Hz
阶数
1
2
3
4
5
6
固有频率 7411 7411 7515 10013 23217 23217
4 实验结果
加速度传感器翻转法和等效力矩法的验证实验及 误差分析表明, 该传感器在施加载荷的主方向的误差, 即各测量点 类误差和系统综合 类误差均小于 1% , 类误差小于合同规定的 5%。
图 3 中给出了有限元模型和由式 (3)、(4) 理论模 型计算得到沿半径的膜片在 az 加速度载荷作用下应 变曲线, 可看出两者结果非常接近, 这说明有限元分析 是有效的, 模型建立比较合适。在 Αx Αy Αz 角加速度载 荷作用下相应的应变, 与 ax ay az 应变分布规律相同。
有限元仿真分析的结果给出了弹性体的静态和动 态特性, 从得到的各轴向载荷作用下的应变, 可以看出 该结构具有较高的灵敏度, 各轴向的灵敏度也比较接 近, 自解耦性高并且结构工艺简单。在弹性体有限元模 型的基础上, 可按照传感器各轴向灵敏度及其一致性 和固有频率等目标进行结构尺寸的优化, 为传感器性 能提高提供有效的设计依据。
Abstract A novel m ono lith ic six2ax is accelerom eter is p resen t. It u ses st rain gauge as sen sing elem en t fo r the detect ion of accelerat ion. Six fu llW heaston b ridges w ill ou tpu t differen t ial vo ltages due to the m ass inert ial fo rce to rque. T he stat ic and dynam ic characterist ics of the sen so r are analysized by FEM. T he experim en t resu lt s are p resen ted also, it s erro rs are less than 1%. Key words Six2ax is accelerat ion Sen sing st ructu re FEM
E 型膜片中的敏感部分圆环平膜片属于薄板结
构, 在 z 轴向加速度 az 的作用下, 边界条件比较简单,
Ξ 本文系国家自然科学基金 (60375027, 60343006) 资助项目。 © 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
4 刘正士, 陆益民, 等. 一种高性能六轴腕力传感器弹性体 结构设计. 应用科学学报, 2001, 19 (1).
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
2lnR -
B+
B R2
(4)
而弹性体结构在每个方向的固有频率求解, 可以
简化为单自由度二阶系统问题。 对于 z 轴向有固有频 率 Ξnz= Kz m , 式中 Kz 为弹性体 z 轴向刚度, 为灵敏 度的倒数; m 为弹性体中可动部分的总质量。
图 3 膜片的应变曲线图
312 动力学仿真分析结果
对弹性体的有限元模型进行动力学分析时, 边界
第 4 期增刊
一体化结构六维加速度传感器设计
303
图有1限 元传模感型器示结意构图及 图
2 ax
作用下
Εr
分布云图
等效为外圆环固定, 集中力作用在硬中心。根据板的小
挠度变形理论, 得到膜片的法向位移为:
Ξ(r) =
3F
(14ΠE
Λ2 h2
)
a
2
[
R
2
(
2
lnR
-
B-
1) + 2B lnR +
D es ign of a M onol ith ic S ix-ax is Accelerom eter Ba sed on S ingle Inertia l M a ss
W u Zhongcheng M eng M ing Shen Fei Ge Yu
( Institu te of In tellig en t M ach ines, CA S , H ef ei 230031, C h ina)
参考文献
1 吴仲城. 多维力传感器设计及其应用基础研究: [ 博士学 位论文 ]. 北京: 中国科学院智能机械研究所, 2001.
2 R. Puers, S. R eyn tijen s. D esign and p rocessing exp eri2 m en t of a new m in ia tu rized cap acitive triax ia l accelerom 2 eter. Sen so rs and A ctua to rs A , 1998, 68.
3 K ijin Kw on, etc. , A bu lk 2m icrom ach ined th ree2ax is ac2 celerom eter u sing silicon direct bonding techno logy and po lysilicon layer. Sen so rs and A ctua to rs A , 1998, 66.