挖掘机液压系统恒功率控制曲线图
力士乐挖机LUVD液压系统

液压挖掘机有两种油路: 开中心直通回油六通阀系统和闭中心负载敏感压力补偿系统, 我国国产液压挖掘机大多采用”开中心”系统, 而国外著名的挖掘机厂家基本上都采用”闭中心”系统。
闭中心具有明显的优点, 但价格较贵。
国内厂家对开中心系统比较熟悉, 而对闭中心系统不太了解,因此有必要来介绍一下闭中心系统, 本文重点分析力士乐闭中心负载敏感压力补偿(LUDV> 挖掘机油路。
LUDV 意为与负载无关的分配阀。
LUDV系统力士乐挖掘机液压系统可以看作由以下4 部分组成:①多路阀液压系统(主油路> 。
②液压泵控制液压系统(包括与发动机综合控制> 。
③各液压作用元件液压子系统, 包括动臂、斗杆、铲斗、回转和行走液压系统, 还包括附属装置液压系统。
④多路阀操纵和控制液压系统。
LUDV系统是力士乐等公司在改进负荷传感技术的基础上发展起来的,它是不受负载影响的流量分配系统,它将常开式压力补偿改为常闭式,泵所提供的流量与负载所需相匹配,避免了不必要的空流和节流损失。
即使泵的流量小于系统复合动作所需的流量,各动作的相对速度也不会发生变化,从而保证动作的协调性,避免动作冲击。
1 多路阀液压系统多路阀液压系统是液压挖掘机的主油路, 它确定了液压泵如何向各液压作用元件的供油方式, 决定了液压挖掘机的工作特性。
力士乐采用的闭中位负载敏感压力补偿多路阀液压系统的工作原理见图1 (因换向阀不影响原理分析, 故未画出> 。
图1 挖掘机力士乐主油路简图挖掘机力士乐主油路由工装油路和回转油路二个负载敏感压力补偿系统组成。
1.1 工装油路工作装置和行走油路(除回转外> 简称工装油路,用阀后补偿分流比负载敏感压力补偿(LUDV>系统, 具有抗饱和功能。
在每个操纵阀阀杆节流口后, 设压力补偿阀, 然后通过方向阀向各液压作用元件供油。
LUDV 多路阀原理符号见图2 。
图2 力士乐多路阀原理符号图LUDV 每个阀块主要由操纵阀和压力补偿阀组成, 其原理符号如图2a 所示。
柳工挖掘机的液压系统及控制 ppt课件

液压泵的基本性能参数
流量Q(单位L/min,升/分钟) 单位时间内输出液压油的体积。 Q=q×n(不考虑单位转换系数,下同) 其中n是泵的转速,单位rpm,转/分钟
泵的功率N(单位Kw,千瓦) N=P×Q
液压马达的基本性能参数
排量q(单位ml/r,毫升/转) 液压马达每转一周所排出液体的体积。排量不可变的叫定量马达, 排量可变的叫变量马达。
主控阀杆
泵1
合流阀杆 泵2
挖掘机的液压系统
驱动
控制油
操纵
柴油机
先导泵
先导阀
司机
驱动
工作油
工作泵
控制油 工作油
主控阀
马达
实现 工作装置工作
工作油 油缸
实现 旋转、行走
液压泵的基本性能参数
压力P(单位Mpa,兆帕) 泵的输出压力由负载决定。负载↑压力↑,负载↓压力↓。安 全阀限制最高压力。
排量q (单位ml/r,毫升/转) 泵每转一周所排出的液压油的体积。排量不可变的泵叫定 量泵;排量可变的泵叫变量泵。
液压泵与液压 马达原理上是 可逆的,但结 构略有不同。
液压泵——轴向柱塞泵
液压控制阀
流量控制阀 压力控制阀 方向控制阀
流量控制阀
主要控制流过管路的流量,通过对流量的控制 还可以对回路的压力产生一定影响。注意 节流会产生损失。
节流阀(阻尼孔)
节流阀
P前
P
△P=P前-P后
使液压油通过小孔、缝隙、窄槽等结构元素后流 量减小并产生压力降△P(阻尼) 。注意流动的 液压油才具有上述性质。如果液压油是静止状态 ,则根据连通器原理,前后的压力是相等的。
液压伺服控制系统的应用示例
阀杆控制方式:手控、液控、电控或者它们的组合
挖掘机液压系统分析ppt课件

1
▍液压符号
一、油路的种类
(1)粗实线:表示主油路,为使驱动装置运转提供的 工作油路,由于流量相对较大,所以用实线表示。
(2)虚线:控制管路和控制油道、先导油路。 (3)双点划线:部件组成,它一般是封闭的。
二、油路的连接状态
(1)圆点与交叉:表示相互连接的油路; (2)交叉与小圆弧:表示相互错开的油路; (3)末尾打叉:表示油路被堵死。
5
▍先导——行走双速功能
问题1:行走电磁阀和泵比例电
磁阀控制方式相同吗?
图1:双速阀芯切换前
图2:双速阀芯切换后
按下速度切换 开关
控制器接收信号
DC3电磁阀线圈 得电
电磁阀换位
先导油引入二速 阀芯控制油口
阀芯换位,斜盘角 度变小,速度增大
6
▍先导——自动怠速功能
先导泵输出油液从P1口 进入主控阀PG口,分别 通过行走和工作装置阀 芯,回路为自动怠速油 路,压力开关通断信号 传到控制器,控制发动 机转速。
二、行走和其他动作一起进行时跑偏 确认及维修;1、调换d1和d2节流阀看故障是否消 除,消除则是节流阀堵塞,则清洗节流阀。 2、直线行走阀芯卡滞,则清洗阀芯。
15
▍动臂提升
XAb1
此处双泵合流
P2
XAb2
P1
16
▍动臂提升
Psp
XAb1 XAb2
回转优先功能:
1、当回转与斗杆、备用同时动 作时,Psp油口先导油作用在回 转优先阀左端,推动阀芯向右移
行走阀芯剖视图 12
▍先导——直线行走功能(直线行走模式)
行走阀芯剖视图
1、直线行走阀处于直线
PTa
行走模式时,阀芯切断pg
三一挖掘机液压系统。

采用 K<1 压力补偿阀结构,△P 与自身负载压力有关,如图七所示,随着自身负载压 力的提高,压差△P 减少,使得流量自动减少,这样当遇到惯性负荷时,不会因负载压力突 然增高,产生压力补偿阀过度调整,使进入回转马达的流量超过目标流量。避免了产生来 回振摆的现象。 采用了这种与自身负载压力相关的压力补偿阀,遇到惯性负荷也能平稳控制,挖掘机 回转就不需要采用单独油泵供油。 五.液压系统其他功能阀(见图一) 1.安全阀 A:控制系统油压。 2.中位卸载阀 B:从符号原理图上可知,该阀是二位二通阀。 中位卸载阀力平衡方程式为: P•A=(P0+PLmax)A+F P=P0+PLmax+F/A 式中: F— 弹簧力 A— 阀液压作用面积 当油泵压力 P>P0+PLmax+F/A 时,油泵就通过此阀溢流。当所有操纵阀杆都在中位时, PLmax =0(即回油),即此时油泵卸载压力为 P0+F/A。 由于有弹簧力 F/A 的作用,因此 P-PLmax=PLS>P0,油泵调节阀处于右位(见图三) 。先 导操纵压力油进入泵的变量机构,使变量泵的流量变到最小。 该液压系统,当所有操纵阀都不工作时,泵处于最小排量和很低油压下运转。 3.切断阀 C: 从符号原理图上可知,该阀为压力阀。 其力平衡方程式为:PLmax+P0=F/A 式中: F— 弹簧力 A— 阀液压作用面积 当最高负载压力 PLmax 超过设定值时,此阀打开排油。由于液压油流动,产生压差,使 P-PLmax 增大,油泵流量调节阀起作用,油泵流量减至最小。 4.等差减压阀 D(见图一) 应该说明系统中等差减压阀 D 输入油压不是主油泵压力油 P, 而是先导油泵压力油 Pp, 因此系统补偿压差 PLS 不是由液压系统主油泵产生,而是由先导油泵产生。
液压挖掘机ppt课件

液压系统原理图
主泵: K3V112DT柱塞式串联变量双泵.
• 最大排量112ml/r,该泵按总功率恒定进行变量、总功 率按4段进行控制、高压切断、中位负流量控制
主泵原理图
• 主操作阀采用川崎KMX15R/B450,最大 流量270L/min,能实现动臂提升合流、 斗杆大小腔合流、斗杆再生回路、行走 直线、动臂提升优先、回转优先、斗杆 闭锁等功能。
位闭心
挖掘机作业过程
• 挖掘机一个作业循环包括以下动作: 1. 挖掘 通过回转铲斗、回转斗杆以及它们的复合动作,实现铲斗
的破土、装土。 2. 满斗回转 铲斗装满土后,动臂提升、同时进行平台回转到卸土
位置; 3. 卸土 平台回转到位后制动,由斗杆调节卸土半径,铲斗翻转卸
土 4. 回位 铲斗卸土,转台反转,动臂、斗杆配合,回到挖掘位置
1。回转平台:由回转平台、液压传动装置、伺服 操纵装置、动力装置、司机室、空调系统、电器系 统等组成。
2。工作装置由动臂、斗杆、铲斗、联杆、摇杆、 油缸等组成。
3。行走装置由车架、支重轮、托链轮、导向轮、
张紧装置、履带、行走机构、回转接头等组成。
液压系统的组成
挖掘机液压系统的基本概念: 液压系统的组成:动力元件、控制元件、执行元件、辅件 定量系统、变量系统 开式系统、闭式系统 恒功率系统 双泵双回路系统、总功率调节、分功率调节、中位、中位开心、中
先导系统液压原理图
先导系统
先导泵
先导泵
电磁阀组
伺服手先导阀采用川崎TH40K1269~70
目前川崎系统采用的是双泵双回路恒功率控制液压系统,带四种功 率控制模式、中位负流量控制,两液压主泵按全功率变量。 小松林德系统采用的是负荷传感系统
全功率变量是指两泵功率之和保持恒定,这主要是当 执行单泵动作时,此泵可吸收另一不工作的液压泵功率, 充分发挥柴油机功率。
液压挖掘机全功率控制
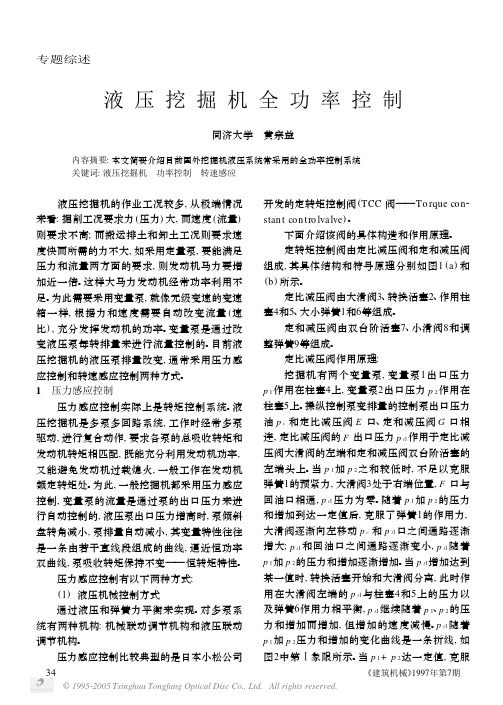
驱动, 进行复合动作, 要求各泵的总吸收转矩和 发动机转矩相匹配, 既能充分利用发动机功率, 又能避免发动机过载熄火, 一般工作在发动机 额定转矩处。为此, 一般挖掘机都采用压力感应 控制, 变量泵的流量是通过泵的出口压力来进 行自动控制的, 液压泵出口压力增高时, 泵倾斜 盘转角减小, 泵排量自动减小, 其变量特性往往 是一条由若干直线段组成的曲线, 逼近恒功率 双曲线, 泵吸收转矩保持不变——恒转矩特性。
37
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
系统发动机和液压泵的匹配采取超马力设定, 即液压泵最大吸收功率超过发动机最大额定功 率, 因为有转速感应控制, 发动机不会过载。一 般还将液压泵最大负荷阻力矩 (电液比例减压 阀电流最小时) 设定低于发动机最大力矩, 以保 证电液比例减压阀失效时, 发动机也不会熄火。 其匹配情况如图11所示, 图11 (a) 为泵 p —Q 特 性上, 液压泵与发动机功率匹配情况; 图10 (b ) 为发动机转矩曲线上, 发动机与泵转矩的匹配 情况。
足。为此需要采用变量泵, 就像无级变速的变速 箱一样, 根据力和速度需要自动改变流量 (速 比) , 充分发挥发动机的功率。变量泵是通过改 变液压泵每转排量来进行流量控制的。目前液
定比减压阀由大滑阀3、转换活塞2、作用柱 塞4和5、大小弹簧1和6等组成。
定和减压阀由双台阶活塞7、小滑阀8和调 整弹簧9等组成。
图4 液压泵 p —Q 特性
(1) 泵控制特性 (即 p —Q 特性) 一般还是
由液压和弹簧作用来实现的, 不能得到理想的
恒功率曲线, 而是用折线来近似等功率双曲线,
挖掘机液压系统分析
动臂缸油路: 动臂提升时,两联同时换向、上位工作,实现双泵合流 动臂下落时,单独回油,平衡回路
平衡阀
合流导阀
铲斗缸油路: 通过合流导阀,实现大腔合流
四、负载敏感液压系统
具体系统:FR65型液压挖掘机液压系统 。 • 单个负载敏感泵:A10VO轴向柱塞泵(恒定驱动力矩) • 负载敏感多路阀(LUDV)
斗杆油缸
boom
arm
铲斗油缸
大臂油缸
bucket
动作特点: 复合动作:铲斗缸与斗杆杠同时动作;动臂缸与回转马达同时动作 优先动作:回转优先、铲斗优先 双泵合流(实现快速运动):斗杆、动臂缸上行、铲斗缸外伸
两泵分别向各自的多 路阀供油
单向节流阀调节动 臂等下落速度,防 止超速下落
行走马达可 双速调节
要求铲斗缸与斗杆杠同时动作;动臂缸与回转马达同时动作; 一个泵供铲斗缸、动臂缸和左行走马达;另一个泵供斗杆杠、回转马达和 右行走马达。 双泵合流:动臂或斗杆单独动作
(二)变量和功率调节方式
液压挖掘机常采用恒功率变量泵、负载敏感变量泵等。
(三)回路组合和合流方式
1. 串联油路 多路阀内第一联阀的回油为第二联阀的进油,依次直到最后一联。 可以实现多个执行机构的复合动作;系统压力高。
全液压挖掘机液压系统分析
冀宏 兰州理工大学
2013年8月
主要内容
• 液压系统特点 • 双泵双回路定量泵系统 • 双泵双回路全功率调节变量泵系统 • 负载敏感系统 • 负流量系统 • 正流量系统 • 节流控制系统
一 、液压系统特点
(一)液压系统的类型 • 多采用开式系统。
有些回转机构专用一个液压泵单独供油与回转液压马达组成闭式回路。 • 挖掘机液压系统常按液压泵和回路的数量、变量和功率调节方式来分类。 • 双泵双回路:
演示文稿挖掘机的液压系统及控制

“点头”现象的解决方案
1.采用三位六通
换向阀;
2.在进油道设置
单向阀。
5
注:
1.管路5和12都是
进油道;
2.管路是回油。
12 10
二通插装阀
方 向 控 制 回 路
液压蓄能器
液压油 膜片
原理:气体被压 缩后储存能量。
1. 主回路:泵——马达——泵 2. 补油回路:油箱——泵——主回路
开式和闭式液压系统
• 请记住: • 闭式液压系统只能用于泵——马达。或者
液压系统的基本组成
• 动力元件:将机械能转换为液体压力能。 • 执行元件:将液体压力能转换为机械能。
例如油缸、油马达等。 • 控制元件:各种阀。大致有压力控制阀、
流量控制阀、方向控制阀等。 • 辅助元件:油箱、过滤器、管路、接头、
密封、冷却器、蓄能器等等。
液压回路的构成
液压执行机构 (将压力转换为动力)
液压泵与液压 马达原理上是 可逆的,但结 构略有不同。
液压泵—轴向柱塞泵
伺服柱塞 斜盘
駆動軸 斜盘支撑台
缸体 配油盘
柱塞
滑靴
液压泵的基本性能参数
• 压力P(单位Mpa,兆帕) 泵的输出压力由负载决定。负载↑压力↑,负载↓压力↓。 安全阀限制最高压力。
• 排量q (单位ml/r,毫升/转) 泵每转一周所排出的液压油的体积。 排量不可变的泵叫定量泵;排量可变的泵 叫变量泵。
重物
面积小
充满油
力=压力×面积 速度=流量÷面积 功率=速度×力
液压系统原理图常用线型和符号
1. 粗实线:主管路和主油道。 2. 虚线:控制管路和控制油道。 3. 双点划线:部件组成,它一般是