平面机械程序库 AMESim仿真软件
AMESim R12 软件安装指南
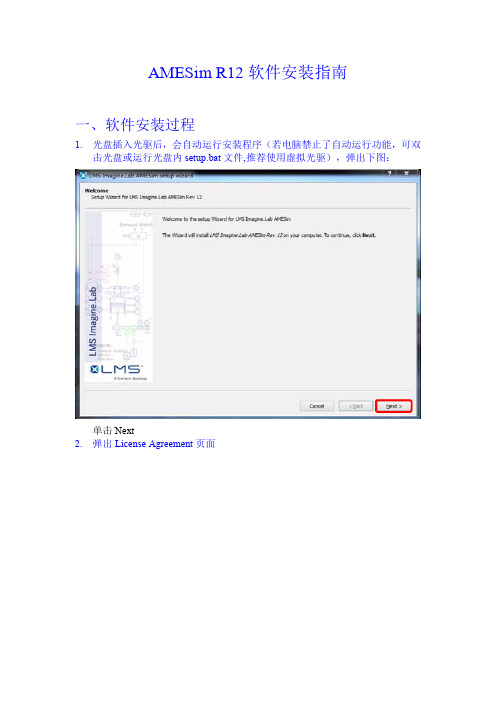
AMESim R12软件安装指南一、软件安装过程1.光盘插入光驱后,会自动运行安装程序(若电脑禁止了自动运行功能,可双击光盘或运行光盘内setup.bat文件,推荐使用虚拟光驱),弹出下图:单击Next2.弹出License Agreement页面选择accept后,单击Next3.弹出Information面板4.输入用户名和公司名以及安序列号(W4LR6QVIG1EU1JPIKJC5ODAAL)单击Next5.弹出Setup type面板选择所需的模块,默认选择Full全部安装,选择好后,单击Next 6.制定安装路径注:路径不能有空格、中文字符7.软件安装好之后设置工作目录选择好后,单击Next8.是否安装SysDM 如果需要安装选择yes,不需要选择No,(一般不安装SysDM 选择No)选择完之后点Finish 重启电脑。
二、RLM安装过程1.AMESim软件安装好,并重启电脑之后,单击,开始菜单>>所有程序>>LMSb AMESim Rev 12>>Install LMS License Server,安装RLM服务。
单击Next2.选择RLM程序的安装路径这里面推荐保持默认安装路径3.单击Next5.单击Next三、License配置过程1.更改license中的主机名,如下图红色区域所示(使用后缀名为.lic的license,将第二行中的IMAGINE_LAB_2012改为本电脑的计算机名)注:用于RLM安装的license有‘ISV lms’字段,表示ISV服务存在,名为lms2.将license文件(*.lic)放到RLM license server 的安装路径下,默认为C:\Program Files(x86)\LMS\LMS RLM 9.3.1 License server\Licensing\Bin。
3.添加环境变量:如下图所示变量名为:LMS_LICENSE变量值为:C:\Program Files (x86)\LMS\LMS RLM 9.3.1 Licenseserver\Licensing\Bin\许可文件名.lic4.进入license 配置界面。
Adams和AMESim联合仿真的设置和简单例子(都是13版本)
Adams和AMESim的联合仿真前言:本人并不是Adams和AMESim的高手,接触AMESim的时间很短,但是需要做Adams和AMEsim的联合仿真,这里分享一下我探索联合仿真的经验。
目录如下:一、仿真前需要做的准备。
1、软件的安装2、环境变量的设置二、一个具体的联合仿真例子。
(这里只介绍Adams主控的仿真)***********************************************************一、仿真前的准备1、软件的安装软件的版本对联合仿真有重要影响,这里只介绍我自己安装软件的情况。
我的系统是win7 32位,安装的软件是Adams2013、LMS b AMESim Rev 13、Visual Studio 2010。
Adams2013和AMESim Rev 13网上有很多下载资源和安装教程。
这里我只强调一下Visual Studio 2010。
也就是可以建立两个仿真软件联系的Visual C++程序。
Visual C++和VisualStudio等之间的关系大家可以自己在网上查,其实都包含有C++语言。
网上有些教程是用VC++6.0来建立两者之间的关系,但是我安装了VC++6.0的各种版本(企业版,中文版,英文版)都没有成功建立仿真,后来安装了完整的Visual Studio 2010就可以了,但是Visual Studio 2010有些大,我下载的是1.75G。
另外就是安装顺序,最好先安装VC++或者VS(我是最后安装的Visual Studio 2010,先安装的说法我这里并没有证实)。
下面是我的软件的安装位置,安装目录没有中文D:\zy\ADAMSD:\AMESimD:\Program Files\Microsoft Visual Studio 10.0在最后安装好Visual Studio 10后把D:\ProgramFiles\Microsoft Visual Studio 10.0\VC\bin下的nmake和vcvars32文件拷贝到AMESim的安装目录下D:\AMESim\v1300。
系统仿真AMESim软件使用说明

系统仿真AMESim软件使用说明目录1.AMESim是什么?2.AMESim 建模步骤?3.AMESim接口4.AMESim标准库5.AMESim软件包6.AMESim参数和变量观察7.AMESim建模(调用已有模型,讲解各元件及相互间联系)1.AMESim是什么?AMESim表示工程系统仿真高级建模环境(Advanced Modeling Environment for performing Simulations of engineering systems).基于直接图形接口,在整个仿真过程中草图系统可以显示在环境中。
AMESim 使用图标符号代表各种系统的元件,这些图标符号要么是国际标准组织(如工程领域的ISO为液压元部件)确定的标准符号、控制系统确定的方块图符号,或者当不存在这样的标准符号时可以为该系统给出一个容易接受的非标准图形特征。
Figure 1.1: AMESim中使用符号(标准液压,机械和控制符号表达的一个工程系统)Figure 1.2: 汽车制动系统的符号(非标准图形特征)2.如何使用AMESim?可按如步骤进行系统建模仿真:• sketch mode (草图模式)----从不同的应用库中选取现存的图形• submodel mode (子模型模式)----为每个图形选择子模型(即给定合适的数学模型假设)• parameter mode (参数设置模式)----每个图形模型设置特定的参数• simulation mode (仿真模式)----运行仿真并分析仿真结果大多数自动化系统都可按上述步骤执行,在每一步都可以看到系统草图。
3.接口与脚本you have the possibility of interfacing with Matlab/Simulink to test the Electronic Control Unit (ECU) of the complete gearbox and have the complete simulation platform for the conception of every kind of gearboxes3.1接口3.2 脚本4.标准库标准库提供了控制和机械图标,子模型允许你完成大量工程系统的动态仿真。
工程系统高级建模和仿真环境介绍(Amesim)

ቤተ መጻሕፍቲ ባይዱ
AMESim在重型机械公司的应用 2007.11
目录
一、AMESim整体介绍 二、AMESim平台的特点 三、五大软件平台介绍 四、应用库介绍: 五、AMEsim分析工具介绍 六、可接口软件介绍 七、液压元器件的设计 八、液压系统的设计 九、AMESim在重型机械公司的应用经验 十、应用总结意见
3.AMESim是多级复杂程度的建模仿真平台 AMESim在统一的平台上提供了方案设计、功能设计到几何设计的多 层次建模方式:数学方程级、方块图级、基本元素级、元件级以及和大 量其它 CAE 工具的接口。不同的用户可以根据自己的特点和专长,选择 适合的建模方式,或多种方式综合使用。
4、AMESim是工程人员使用的建模和仿真平台 AMESim定位在工程技术人员使用。建模的语言是工程技术语言:基 于物理模型的图形化建模方式。不需要编写任何程序代码。AMESim使得 用户可以从繁琐的数学建模中解放出来,Activity Index)。 从而专注于物理系统本身的设计。 5、AMESim是强有力的数字求解器 AMESim的智能求解器能够根据所建模型的数学特性,自动选择最佳 的积分算法,并根据在不同仿真时刻的系统的特点,动态地切换积分算 法和调整积分步长,以缩短仿真时间和提高仿真精度。 6、AMESim是稳态/动态性能分析平台 AMESim提供了齐全的分析工具,以方便用户分析和优化自己的系统 :线性化分析工具 (系统特征值的求解;Bode图, Nichols图, Nyquist 图;根轨迹分析),模态分析工具,频谱分析工具 (快速傅里叶转换 FFT;阶次分析Order Analysis;频谱图Spectral maps) 以及模型简 化工具(
AMESim仿真技术及其在液压系统中的应用

AMESim仿真技术及其在液压系统中的应用随着科技的不断发展,仿真技术在工程领域中的应用越来越广泛。
AMESim仿真技术作为一种系统级仿真软件,能够模拟和分析多个物理领域的耦合系统,尤其在液压系统中得到广泛应用。
本文将从AMESim仿真技术的介绍、液压系统基础和模型构建,以及仿真在液压系统中的应用等方面进行探讨。
AMESim仿真技术是由法国LMS公司研发的一种多领域系统仿真软件。
它通过建立系统级的数学模型,能够模拟和分析多个物理领域的复杂耦合系统,包括液压、气动、电控、机械、热力等。
AMESim具有图形化建模界面,用户只需通过拖拉连接各个模块进行系统建模,无需编写复杂的代码。
同时,AMESim还具备快速仿真和优化的能力,能够极大地提高系统设计的效率和准确性。
液压系统是一种基于液体传动能量的技术,广泛应用于工业、航空、机械等领域。
了解液压系统的基础知识对于进行仿真建模至关重要。
液压系统主要由液压源、执行元件、控制元件和负载组成。
液压源产生压力油液,通过控制元件对压力油液进行调节,最终驱动执行元件完成工作。
液压系统具有反馈控制、大功率传动、快速响应和负载自适应等优势。
在液压系统中,液压元件的参数调节、控制策略的选择以及系统的优化等问题对系统的性能和效率有着重要影响。
在AMESim中进行液压系统建模时,首先需要确定系统的工作流程和参数。
通过拖拉连接不同的模块,可以对液压系统的压力、流量、温度等参数进行仿真分析。
同时,AMESim还可以加入控制算法,使系统具备自动调节功能。
在液压系统中,常见的仿真模型包括液压缸模型、泵模型、阀门模型等。
这些模型可以根据实际情况进行自定义和修改,以满足系统设计和性能优化的需求。
仿真在液压系统中的应用主要有以下几个方面:首先,仿真技术可以对液压系统的性能进行全面评估。
通过改变不同参数的数值和控制信号的输入,可以观察系统的响应和工作状态,并进行性能指标的计算和对比分析。
这对于优化系统设计、提高系统的效率和可靠性具有重要意义。
使用AMESIM进行控制策略仿真验证
使用AMESIM进行控制策略仿真验证AMESim(Advanced Modeling Environment for Simulation of Systems)是由法国LMS公司开发的一款多领域系统级建模和仿真软件。
它可以用于对各种复杂系统进行建模和仿真,包括机械、电子、液压、气动和热力系统等。
控制策略仿真验证是通过建立系统的数学模型,将控制策略应用于模型,并对其进行仿真来验证控制策略的有效性和稳定性。
AMESim可以帮助工程师在设计阶段就对控制策略进行仿真验证,从而避免实际系统构建后的不可预见问题,节约成本和减少时间。
1. 建立仿真模型:根据实际系统的物理特性和结构,使用AMESim进行系统的建模。
通过选择合适的组件和连接它们,可以构建机械、电子、液压或热力系统等的模型。
2. 定义控制策略:根据系统的需求和设计要求,选择合适的控制策略。
控制策略可以是PID控制、模糊控制、最优控制等。
根据控制策略的要求,在AMEsim模型中添加控制算法和控制器。
3.设置仿真参数:定义仿真的时间步长、仿真时间和仿真环境的初始条件。
根据具体的仿真要求和需求,设置合适的参数。
4. 运行仿真:通过点击仿真按钮,启动仿真。
AMESim会先根据系统的初始条件进行仿真,并记录下系统在仿真过程中的各种数据。
5.仿真结果分析:一旦仿真完成,可以通过查看仿真结果来分析系统的性能和响应。
可以绘制系统输出变量的曲线图,比较仿真结果与设计要求的差异。
1. 准确性:AMESim采用基于物理和数学原理的建模方法,可以高度精确地描述和模拟实际系统的行为。
通过对仿真结果的分析,可以准确地评估控制策略的性能。
2. 灵活性:AMESim提供了丰富的组件库,可以灵活地构建各种系统的仿真模型。
无论是机械、电子、液压还是热力系统,都可以在AMESim中进行建模和仿真。
3.时间和成本的节省:通过在设计阶段进行仿真验证,可以减少实际系统搭建和调试的时间和成本。
AMESim-MATLAB联合仿真详细设置+部分问题解决步骤
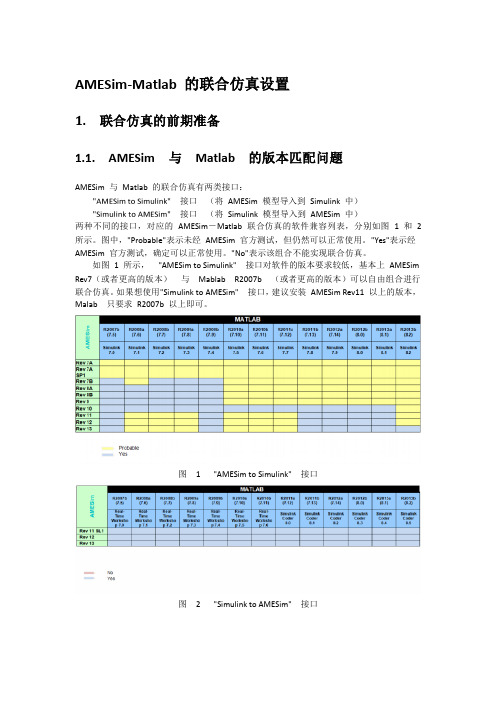
AMESim-Matlab 的联合仿真设置1. 联合仿真的前期准备1.1. AMESim 与Matlab 的版本匹配问题AMESim 与Matlab 的联合仿真有两类接口:接口(将AMESim 模型导入到Simulink 中)接口(将Simulink 模型导入到AMESim 中)两种不同的接口,对应的AMESim-Matlab 联合仿真的软件兼容列表,分别如图 1 和 2 所示。
图中,"Probable"表示未经AMESim 官方测试,但仍然可以正常使用。
"Yes"表示经AMESim 官方测试,确定可以正常使用。
"No"表示该组合不能实现联合仿真。
如图 1 所示,"AMESim to Simulink" 接口对软件的版本要求较低,基本上AMESim Rev7(或者更高的版本)与Mablab R2007b (或者更高的版本)可以自由组合进行联合仿真。
如果想使用"Simulink to AMESim" 接口,建议安装AMESim Rev11 以上的版本,Malab 只要求R2007b 以上即可。
图 1 "AMESim to Simulink" 接口图 2 "Simulink to AMESim" 接口1.2. Microsoft Visual C++编译器(VC++)的版本选择?AMESim 支持的VC++版本分别如图1(32 位编译器),图2(64 位编译器)所示。
图 1 和图 2 中,"Probable","Yes","No"表示的意思同上。
经测试,AMESim Rev9 可以正常调用VS2010 版的VC++(32 位)。
另外,从图 1 中,可以看到,VC++ 6.0 不能支持AMESim Rev11 以上的版本。
AMESim软件的特征及其应用
微觎画用曰臼能侣2004(12)!!!!!!!!!传统的设计方法往往是通过反复的样品试制(物理成型)和试验来分析该系统是否达到设计要求 结果造成大量的人力和物力投入在样品的试制和试验上O 随着计算机仿真技术的发展 在工程系统的设计开发中 大量地采用了数值成型的方法 即通过建立系统的数值模型 利用计算机仿真使得大量的产品设计缺陷在物理成型之前就得到处理 从而可以使企业在最短的时间\以最低的成本将新产品投放到市场O 正是由于计算机仿真技术的这种优越性 国外许多大公司将计算机仿真技术已普遍应用到产品的设计\开发和改进中O计算机仿真就是在建立系统数学模型的基础上 将该模型在计算机上运行 以进行系统科学试验研究的全过程O 仿真技术源于上世纪50年代初 早期应用在国防科技和军工部门(如航天\航空和核能等) 如今已扩展到科学研究\工程设计\辅助决策\系统优化等各个方面 使人们的许多传统观念和方法产生了重大变革O 计算机仿真技术被称为继科学理论和试验研究后的第3种认识和改造世界的工具O 随着计算机技术的发展和计算数学的成熟 计算机仿真技术已成为工程领域必不可少的重要设计手段 它的应用可以大大地缩短产品的开发周期和降低产品开发的成本 提高产品的竞争力Ol AMESim 系列软件介绍1.1AMEsim 包含的系列软件(l >AMESim (Advanced Modeiing Environment for Simuiation of engineering systems >:一个图形化的开发环境 用于工程系统的建模\仿真和动态性能分析O(2>AMESet (Adaptive Modeiing EnvironmentSubmodei Editing Tooi >:一个模型和文档生成器用于协助开发和维护自己的模型库O(3>AMEcustom :一个数据库创建工具 用于为子模型或超模型创建定制用户界面和参数设置O 它可以使最终用户只允许访问相关有用的信息 而涉及到技术敏感性的信息可以在发布之前进行加密O(4>AMERun :AMESim 的只运行版本 AMERun 的用户既可以修改模型参数和仿真参数 执行稳态或动态仿真 输出结果图形和分析仿真结果 也可以通过禁止最终用户修改模型结构和建模假设来保护模型O1.2该软件具有的特点(l >图形化物理建模方式使得用户可以从繁琐的数学建模中解放出来从而专注于物理系统本身的设计O 建模的语言是工程技术语言 仿真模型的扩充或改变都是通过图形用户界面(GUI)来进行 不需要编写任何程序代码O(2>智能求解器能够根据用户所建模型的数学特性自动地在l7种算法中选择最佳的积分算法 并在不同的仿真时刻根据系统的特点动态地切换积分算法和调整积分步长 以缩短仿真时间和提高仿真精度 而内嵌式数学不连续性处理工具有效地解决了数值仿真的 间断点"问题O(3>仿真范围广 实现了多学科的机械\液压\气动\热\电和磁等领域的建模和仿真 且不同领域的模块之间可直接进行物理连接O(4>基本元素理念确保用户用尽可能少的单元构建尽可能多的系统 这种理念的巨大优越性在于工程师只需要掌握较少的系统建模 字母"就可以建模 从而通过减少学习时间和避免数学建模来提高工作效率O(5>AMESet 为用户提供了一个标准化\规范化和图形化的二次开发平台 用户不仅可以直接调用AMEsim 孜件的特征及其应用徐工研究院秦家升游善兰"!"!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!"摘要:在现代工程领域设计中 计算机仿真已成为一种重要设计手段O 从传统设计方法的弊端出发 介绍了仿真软件AMEsima 的特点 并结合实例给出了其在优化蓄能器参数上的应用O关键词:计算机仿真蓄能器AMEsim6--微觎画用曰臼能侣2004(12)图!非保压控制图"保压控制图#保压液压系统仿真AMEsim中所有模型的原代码,而且还可以把用户自己的C或FORTRAN代码模型以图形化模块的方式综合进AMEsim软件包(6>保留了数学方程级~方块图级~基本元素级和元件级4个层次的建模方式,不同的用户可以根据自己的特点和专长选择适合自己的建模方式或多种方式的综合使用(7>提供了线性化分析工具(如系统特征值求解~Bode图~NichoIs图~Nyguist图~根轨迹分析>~模态分析工具~频谱分析工具(如快速傅里叶转换FFT~阶次分析Oldel AnaIysis~频谱图spectlaI maps>以及模型简化工具,以方便用户分析和优化自己的系统O(8>具有动态仿真~稳态仿真~间断连续仿真以及批处理仿真多种仿真运行模式(9>提供了丰富的和其它软件的接口,如控制软件接口(Matlab/ Simulink & MatrixX>~多维软件接口(Adams & Simpack~Virtual Lab Motion*~3D Virtual*>~FEM软件接口(Flux 2D>~编程语言接口(C 或Fortran>~实时仿真接口(RTLab~dSPACE*>和优化工具接口(iSIGHT*>(10>有力的技术支持AMEsim的开发者IMAGINE公司是从一个技术咨询公司发展起来的,并在世界一些著名公司和研究所完成了近千个技术咨询项目2实例分析一液压系统因工作需要,要求一液压缸保持一定工作压力,具体参数如下液压缸设定压力1 Mpa,压力允许误差为15%,蓄能器体积6.3L,充气压力200kpa,其它参数如电机转速~泵排量~缸径~泄露量等皆为已知,用AMEsim仿真软件做如下的工作首先我们通过点击鼠标建立该系统的仿真模型,如图1可以看出用AMEsim绘制的仿真模型和液压系统的原理图基本一致该系统的保压原理是通过检测液压缸内的工作压力并和设定的压力进行比较,若检测压力超过设定压力,则让电机停止运转,泵即停止供油若检测压力低于设定压力,则电机再次启动,泵又重新供油,缸内工作压力得以恢复通过这种方式可使系统的工作压力始终保持在设定值接下来我们对仿真模型中的每个图形模块设置我们所期望的参数值,最后运行仿真模型便可得出仿真结果(1>压力对比为了比较采用保压控制和不保压控制两个方案,图2图3仿真的结果告诉我们,由于没有采用保压控制,在泄漏的影响下,系统的压力一直在下降,经过17.7s以后,缸内的压力就不能达到压力要求了,而采用了保压系统的方案,缸内的压力可以一直维持在要求的压力上(2>仿真结果通过仿真计算,还可以直接分析缸内压力随时间的变化情况,如图4所示从图4可见,缸内压力建立需要的时间是25s,进一步放大图中直线部分,如图5所示,我们可以清楚地看到缸内压力的波动情况,压力波动的振幅为800pa此外我们也可以将电机启动停止情况和压力波动情况绘在一张图上,如图6所示,电机在100s的仿真时间内启停了3次7微觎画用曰臼能侣2004(12)图4压力建立图5压力波动图6电机启停和压力波动!! 3 参数优化如果需要考察气囊式蓄能器预充气压力对压力波动\压力建立时间及其保压时间等参数的影响9可以利用AMESim 的Batch 仿真运行模式9分别将预充气压力设定为200 kPa 曲线I)\500 kPa(曲线II 和800 kPa 曲线III 9从图7中可以明显看出 充气压力小时9压力波动值较小9但是压力建立时间长9保压时间短9充气压力高时9压力虽可迅速建立9保压时间也较长9但是压力波动也较大0因此在产品设计阶段我们可以根据要求在压力波动\压力建立时间及其保压时间之间折衷以确定最佳的预充气压力O3小结AMESim 仿真软件应用广泛9不仅可以指导新产品的设计开发9建立现有产品的仿真模型并进行参数修改以对现有产品的性能进行改进9而且还可对故障进行仿真研究9即在修正后的模型上加上c 异常s 工作条件就可复现出故障现象9在操作上也非常简单方便9经下面4个步骤就可以得出仿真结果1 Sketch 9从不同的应用库中选取现存的图形模块来建立系统的模型O2 Submodeds 9为每个图形模块选取数学模型O3 Paiameteis 9为每个图形模块设置参数值O4 Simudation 9运行仿真并分析仿真结果O通信地址!江苏省徐州市金山桥经济技术开发区工业一区徐工研究院"221004#收稿日期 2004-08-17图7蓄能器充气压力仿真""!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!!!!"山推被认定为中国弛名商标近日9c 山推s 被国家商标局在保护注册商标专用权行动中认定为中国驰名商标9这是我国商标认定办法与国际接轨后9国内推土机行业首家通过认定的中国驰名商标O山推工程机械股份有限公司作为我国推土机行业的排头兵企业9生产的c 山推牌s 系列产品连续15年被推荐为c 用户满意产品s91997年通过ISO9000质量体系认证9产品销往60多个国家和地区O 此次通过中国驰名商标认定9必将进一步增强企业市场竞争力9加大企业产权保护力度9提升企业在国际\国内市场的信誉度和山推品牌价值9有力地加快山推国际化步伐O凌雁青崔保运8AMESim软件的特征及其应用作者:秦家升, 游善兰作者单位:徐工研究院刊名:工程机械英文刊名:CONSTRUCTION MACHINERY AND EQUIPMENT年,卷(期):2004,35(12)被引用次数:50次1.程越基于AMESim的汽车无级变速器湿式离合器的系统仿真[期刊论文]-制造业自动化 2011(4)2.张超.廖金军.周志杰AMESim API在复杂物理系统仿真中的应用[期刊论文]-流体传动与控制 2011(1)3.杜明.何少佳.杨文.肖勇军新型人造金刚石压机加热系统的设计[期刊论文]-液压气动与密封 2010(2)4.司癸卯.张青兰.段立立.李晓宁.孙恒基于AMESim的液压破碎锤液压系统建模与仿真[期刊论文]-中国工程机械学报 2010(2)5.王晓兰.郭津津.韩奕倢基于AMESim的二次进给出口调速换接回路仿真分析[期刊论文]-组合机床与自动化加工技术 2010(11)6.丁建春.孙法国.史淑娟.崔卫民基于AMEsim的运载火箭保险阀系统性能可靠性分析[期刊论文]-强度与环境 2010(5)7.崔卫民.林晔.孙法国运载火箭安全阀的系统性能可靠性分析[期刊论文]-机电一体化 2010(4)8.景江南.赵宏林.刘文利.陈翠和.张蓬浅水铺管船锚机变速制动器的仿真研究[期刊论文]-机电工程技术 2010(10)9.王浩伟.邢红兵.高英杰.涂朝辉利用蓄能器提高液压振动台响应特性的研究[期刊论文]-液压与气动 2010(11)10.李毅.谷立臣基于AMESim仿真的液压系统参数耦合研究[期刊论文]-液压与气动 2010(11)11.曾文武旋转平台液压系统的设计与仿真研究[期刊论文]-科技信息 2010(32)12.高明.吴智勇.刘海明.黄罡基于AMESim的混凝土泵车泵送液压系统仿真研究[期刊论文]-建筑机械(上半月) 2010(11)13.黄海涛.彭国朋.周建华基于联合仿真的雷达天线液压起竖系统研究[期刊论文]-电子机械工程 2010(6)14.秦贞超.周志鸿.周梓荣.马肖丽基于AMESim的水压凿岩机冲击机构建模与仿真[期刊论文]-液压气动与密封 2010(12)15.高伟.姚进基于AMESim的节能型液压抽油机设计仿真[期刊论文]-液压气动与密封 2009(3)16.谢伟东.刘大磊基于AMESim的道路模拟液压伺服系统的优化设计[期刊论文]-农业装备与车辆工程 2009(5)17.穆健勇.邓伟森液压支架自动反冲洗过滤器的分析与研究[期刊论文]-煤矿机械 2009(6)18.孙法国.宋笔锋.崔卫民基于有限元法的减压阀膜片元件有效直径的计算及影响因素分析[期刊论文]-机床与液压 2009(7)19.晋晓伟.孙亮.马键.李平推进剂供应系统增压过程仿真[期刊论文]-火箭推进 2009(3)20.高伟.姚进.史延枫基于AMESim的汽车液压制动系统HBS仿真研究[期刊论文]-液压气动与密封 2009(2)21.杨阳.刘松.秦大同.黄晓容ISG型混合动力汽车制动系统仿真分析[期刊论文]-重庆大学学报(自然科学版) 2009(7)22.王晋之.曹捷.张斌.李春光一种汽车起重机用液压变量马达的性能分析和优化设计[期刊论文]-液压气动与密封 2008(5)23.朱文杰.翟尧.张翔基于AMEsim进行混合动力再生制动的建模[期刊论文]-拖拉机与农用运输车 2008(2)24.童小冬AMESim软件特征以及在掘进机液压控制系统中的应用[期刊论文]-凿岩机械气动工具 2008(1)25.王维.朱思洪AMESim仿真技术在冷凝器性能研究中的应用[期刊论文]-机械工程与自动化 2008(1)26.彭国朋.周建华基于AMESim的雷达天线车液压调平系统仿真研究[期刊论文]-电子机械工程 2008(3)27.任彦恒.吕建刚某型履带车辆液压助力变速操纵系统仿真[期刊论文]-军械工程学院学报 2008(1)28.邬国秀基于AMESim的阀控液压缸液压伺服系统仿真[期刊论文]-机械 2008(1)29.江玲玲.张俊俊基于AMESim与Matlab/Simulink联合仿真技术的接口与应用研究[期刊论文]-机床与液压 2008(1)30.王定军.袁洪滨.董苑贮箱充填过程仿真和分析[期刊论文]-火箭推进 2008(1)31.陈金涛.赵同宾.冯明志.艾钢.曾宪友基于AMESim的柴油发电机组建模与仿真[期刊论文]-柴油机 2008(1)32.江玲玲.张俊俊基于AMESim与Matlab\Simulink联合仿真技术的接口与应用研究[期刊论文]-通用机械 2007(9)33.吴亚锋.郭军基于AMESim的飞机液压系统仿真技术的应用研究[期刊论文]-沈阳工业大学学报 2007(4)34.李晓松.汤学智基于ADAMS的硬度检测装置设计[期刊论文]-机械设计与制造 2007(8)35.龚进.冀谦.郭勇.张德胜AMESim仿真技术在小型液压挖掘机液压系统中的应用[期刊论文]-机电工程技术 2007(10)36.江玲玲.张俊俊基于AMESim与Matlab\Simulink联合仿真技术的接口与应用研究[期刊论文]-流体传动与控制 2007(3)37.张增猛.周华.孙健.杨华勇基于压差控制的蓄能器压力调节方法及其AMESim仿真[期刊论文]-机床与液压 2007(6)38.郑久强.龚国芳.邢彤.胡国良盾构刀盘变转速液压驱动系统节能仿真分析[期刊论文]-机床与液压 2007(4)39.肖岱宗AMESim仿真技术及其在液压元件设计和性能分析中的应用[期刊论文]-舰船科学技术 2007(z1)40.江玲玲.张俊俊基于AMESim的液压位置伺服系统动态特性仿真[期刊论文]-机械工程与自动化 2007(1)41.赵益春热轧卷取机助卷系统的动态分析与研究[学位论文]硕士 200742.刘海丽.李华聪液压机械系统建模仿真软件AMESim及其应用[期刊论文]-机床与液压 2006(6)43.郑久强.龚国芳.胡国良.杨华勇盾构刀盘变转速液压驱动系统[期刊论文]-工程机械 2006(4)44.马长林.黄先祥.郝琳基于AMESim的电液伺服系统仿真与优化研究[期刊论文]-液压气动与密封 2006(1)45.郭军.吴亚峰.储妮晟AMESim仿真技术在飞机液压系统中的应用[期刊论文]-计算机辅助工程 2006(2)46.陈宏亮X-8航空发动机燃油调节系统建模仿真研究[学位论文]硕士 200647.刘海丽基于AMESim的液压系统建模与仿真技术研究[学位论文]硕士 200648.张明辉大型履带起重机回转液压系统仿真研究[学位论文]硕士 200649.余佑官.龚国芳.胡国良AMESim仿真技术及其在液压系统中的应用[期刊论文]-液压气动与密封 2005(3)50.曾良才板带轧机液压AGC综合测试系统及故障诊断研究[学位论文]博士 200551.张超.廖金军.周志杰AMESim API在复杂物理系统仿真中的应用[期刊论文]-流体传动与控制 2011(1)本文链接:/Periodical_gcjx200412003.aspx。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件1:外文资料翻译译文平面机械程序库 AMESim仿真软件第一部分制定动力学方程威尔弗里德侯爵,法夫尔埃里克Bideaux ,塞尔日Scavarda工业自动化实验室,里昂国立科学应用研究所,法国投稿:2003年3月25日;修订稿:2004年12月17日;录用稿:2005年2月8日网上提供:2005年3月17日摘要:本文介绍了应用于AMESim仿真工具的平面机械库的数学开发,刚体与运动副是该库的基本组件。
由于AMESim平面机械库设计原则的要求,数学模型部分需要一个基于通用矢量演算的约束公式的方程。
该方程使用非独立广义坐标。
这种动力学方程组是应用乔丹的原则结合拉格朗日因子而获得的,刚体组件的数学模型包括以非独立广义坐标表达的微分方程,运动副组件的数学模型是基于应用几何,运动和加速度约束方程的Baumgarte稳定式。
拉格朗日因子是这些Baumgarte稳定式的隐含解,本文的第一个主要成果是矢量形式的集合约束的表达及其开发,第二个重要成果是使已有的方程适用于AMESim设计原则。
2005年Elsevier B.V.版权所有关键词:AMESim;平面力学;动力学方程;约束方程;拉格朗日因子;Baumgarte 稳定1. 导言本文分为两部分,为仿真工具AMESim(2)提出了一种新模型库。
第一部分主要是模型库的理论开发,第二部分模型库的组成因为它初次用于AMESim,并以七刚体刚体应用实例给予演示。
改库组件属于平面机械域。
其目的不是与更适应该域多体系统软件工具竞争,而是扩大能够被处理AMESim的工业应用的范围,从理论的角度看来,应用该库的难度主要是将已有的机械方程的以适用于AMESim设计原则的内在要求。
该解可由将用乔丹原则和拉格朗日乘法相结合表示的动力学方程用于Baumgarte的稳定式而得出。
同时研究了关于库组件(刚体和运动副)的该方程的通用特性,这也是本文一个关键成果。
本质上,该方程包括与运动副相关的几何约束矢量表达以及她们的开发执行。
结果是为运动和加速度的限制建立适合库中每个运动副的唯一表达。
该通用方程的特性使运动副约束的推导系统化。
运用所提出的方程,可以想象一个新的运动副向量约束并直接导出其相应的数学模型。
同时,在预定义的组件模型上下文中,已给公式使用输入,输出清楚地表明了不同数学模型的边界,因此它同时可帮助定义在各模型中必须使用的输出公式。
同时,该公式提出了本质上可以处理闭环结构。
AMESim(用于高级建模的执行仿真环境)被用于组件库内。
组件,用技术图标的符号表达,完全可以像下面研究的系统一样联结。
AMESim最初应用于简单的一维运动的约束驱动二维机械程序库的发展。
第2节概述了一些多刚体表达和面向对象的工具,以及AMESim的环境要求。
这些要求就如何建立二维程序库有些影响,第3节详细说明了建立库组件的数学模型的理论发展。
第4节总结了第一部分。
2. AMESim设计原则的约束在简要概述了多刚体表达原则和一些面向对象工具后,给出了AMESim的需求表达。
关于多刚体表达的现状在文献[23]中已给出。
细节在此不再敷述,更深入的描述读者可参照这本书。
虽然已经过去10年,某些工具已不在发展并且其他工具已经发生了变化,但该书给出了关于可以用来作为多刚体表达的基础的主要原则的一个好方法,同时它的综述使库的提出定位于这些表达。
写出动力学方程方法的有不同的方法,多刚体表达中用的最多的是适用于单个刚体的牛顿-欧拉方程。
多组刚体的牛顿-欧拉方程,拉格朗日方程和凯恩方程[13,14]。
动力学方程中的变量不是绝对坐标就是相对坐标。
同时使用补充方法减少微分代数方程的次数。
主要的是坐标分区法,投影矩阵法,Baumgarte稳定式和惩罚方程[9]。
前两个方法的目的是在一套独立的广义坐标下工作,而允许引入约束,加上微分方程,去处理Baumgarte 稳定式和通过引入额外的动力学模型里处罚方程增加了微分系统的阶数。
在AMESim所使用的面向对象工具的域中,多刚体表达采用不同的方法来建模。
例如像AMESim一样,在多学科关联下基于易识别技术组件的Dymola[21],它采用不同的方法建立数学模型。
本质上,每个组件模型由即不面向变量分配也不事先组织的方程组成。
然后,在组件连接阶段,所有的数学模型以一个隐含的形式聚集,编译程序完成变量分配和公式一致化。
因此,全面减少了整个模型的次数,许多约束被事先用符号表达排除了。
同样的,基于键合图的工具(如20Sim[1]或MS1[18])可以处理多学科关联下的多刚体系统,(如[4。
7])。
键合图语言的基本特点是在不受因果支配的水平下描述能量拓扑的能力。
这使所有的模型变量在全局内分配,所有方程在全局内组织,同时还能消除多余的多刚体依赖。
通过展示AMESim的主要特点说明平面机械程序库如何实施的现在是重要的。
它面向工程系统的功能和其用户友好使AMESim可以与已确定技术组件一起运行,通过图标象征性地操纵。
在所研究工程的系统架构下这些图标是相互关联的。
图1显示的的一个门锁系统例子,使用在AMESim中对永久磁铁建模,图标属于磁力库、机械库和信号图,该例子给出了在一个回路中机械域和磁力域间的耦合作用。
该回路由永久磁铁反馈(右手电路),它按照另一无源电路(左手电路)运动。
主要组成部分包括一个永久磁铁(矩形罗盘针),3名磁路部分的特点是某些不愿意(正方形式的矩形对角线交叉与内),两个空气间隙变量(垂直双矩形),2个机械节点(双方气隙组成部分),一个信号位移转换器的信号发生器(在该中心的右手边电路),和一个组成部分的一套磁介质特性(圆圈中的BH图)。
每个部件都有一个可以与之兼容的数学模型。
模型一旦被选定,部件就保存这个数学模型。
与因果工具相反,AMESim使用组件模型所用的等式兼具优先面向变量分配和组织。
这项功能要求预定义的数学演算方案在一个新的模式下实施。
同样这个组件的数学模型必须有组织,以便纳入其他潜在的组成部分。
因此每个组件相关的数学模型都有一套固定的输入和输出变量。
因此可以看成是一种因果模型。
方面的组成部分可以交流这些变量的出路问题的一个组成部分的变量,这个方程能够使得这些变量的换算结果以这种方式从方程中输出,这个方程使得这些变量以数学模型输出,同时这个方程能够使得这些变量的换算结果以这种方式从方程中输入,这个方程使得这些变量以数学模型输入。
当执行新的组件时,这一因果特性的AMESim原理是主要的限制。
这不同于其他的面向对象的工具,基于因果关系的组件模型,就好象Dymola ,或以键合图输入的工具(如20-Sim或MS1)。
图2 给出了一个例子,两个组件的机械(一个平移的质量)和液压(双路液压泵)域。
组件的连接部分显示这些变量的相互交换,特别是输出('向外'箭头)传递给连接部件的组件和来自这些连接组件的输入('进入'箭头)。
这些连接部件是密切相关的电源接口,因为这两个变量在电源变量中相互交换。
图2例子说明了两个关键的特征程序库定位模拟工具。
第一个是域的端口概念。
它说明AMESim可以处理多学科系统。
第二个特征是连接端口的限制。
从一个组件的数学模型需要对其计算,然后计算出其状态和产出,并非所有的组合都能连接起来。
例如,图2的例子不能连接其他任何端口。
不管怎样大部分的组件都可以连接到一个弹簧组件或阻尼器组件。
库的另一个重要特点是定位模拟工具模块化概念。
这种结果往往考虑到其连接端口的对称性。
这种对称性还不能推广到所有的AMESim组件中,在已通过的平面机械程序库。
当这个程序库的组件存在时,会出现明显的结果。
在平面机械化的环境下程序库不仅限于任何机械域的用途。
还接受闭环结构。
尽管相对坐标通常能制定动力学方程,但AMESim原理只使用绝对坐标。
绝对坐标中心的质量已选定为每个主要部分。
然而,平面功能的机械库并不需要任何特定变量的定位。
因此绝对角位置也被选定为每个刚体。
一旦再次使用,由于AMESim 原理,当这部分连接的时候,方程的组成部分不能在全域范围内重组,这样就禁止使用协调分区方法或投影法在该指数下降的微分代数方程系统。
由于这个原因,Baumgarte的稳定性也被用在程序库。
3.库模型的理论发展正如已经解释了前一节的库必须是以确定技术部分组织的一样。
这已决定将平面机械程序库的基础是刚体和运动副部分。
这部分组件与假定刚性材料项目的机械装置连在一起。
它的行为基本上是其动力学状态决定的。
运动副部分是有关与抽象的项目一起,代表依附在机械装置上的刚体。
他们假设是理想的,他们的数学模型基于强加相关联的刚体的约束。
3.1刚体部件数学模型数学模型的主要部分是根据乔丹的原则制定(例如,[5,23]):A*=P*其中A*是由质量加速度产生的虚拟力, P*是由刚体动作产生的虚拟力。
在库原则中在广义坐标中没有优先权。
如对于平面运动,广义坐标中,是绝对的质心坐标投影到绝对参照系(坐标)和绝对角位置(图3)。
这一选择可以处理使更多的一般情况下一个刚体的运动。
如后面所示,刚体的限制将取决于运动副的制约。
附件2:外文原文(复印件)。