基于Simulink和VR工具箱的机器人行驶控制系统计算机仿真
基于Matlab/Simulink辅助的《计算机控制技术》实验案例
基于Simulink_VR的智能小车运动控制仿真
0引言智能车设计是近年发展起来的一门新兴综合技术,涵盖了控制工程、电子工程、模式识别、计算机和机械等多个学科的知识,在军事、科研和工业中有广阔的应用前景[1]。
本文设计了一个基于Simulink7的智能小车仿真平台,能够根据系统性能要求确定PID控制器的最优参数,并且利用虚拟现实技术实时反映智能小车运行过程中的状态,可以为电子设计中掌握小车运动控制提供很好的演示环境。
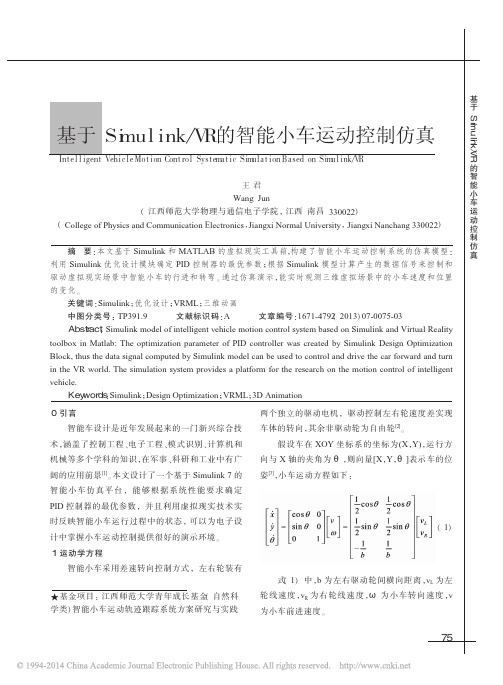
1运动学方程智能小车采用差速转向控制方式,左右轮装有两个独立的驱动电机,驱动控制左右轮速度差实现车体的转向,其余非驱动轮为自由轮[2]。
假设车在XOY坐标系的坐标为(X,Y),运行方向与X轴的夹角为θ,则向量[X,Y,θ]表示车的位姿[3],小车运动方程如下:(1)式(1)中,b为左右驱动轮间横向距离,v L为左轮线速度,v R为右轮线速度,ω为小车转向速度,v 为小车前进速度。
基于Simulink/VR的智能小车运动控制仿真IntelligentVehicleMotionControlSystematicSimulationBasedonSimulink/VR王君Wang Jun(江西师范大学物理与通信电子学院,江西南昌330022)(College of Physics and Communication Electronics,Jiangxi Normal University,Jiangxi Nanchang330022)摘要:本文基于Simulink和MATLAB的虚拟现实工具箱,构建了智能小车运动控制系统的仿真模型:利用Simulink优化设计模块确定PID控制器的最优参数;根据Simulink模型计算产生的数据信号来控制和驱动虚拟现实场景中智能小车的行进和转弯。
通过仿真演示,能实时观测三维虚拟场景中的小车速度和位置的变化。
关键词:Simulink;优化设计;VRML;三维动画中图分类号:TP391.9文献标识码:A文章编号:1671-4792(2013)07-0075-03Abstract:Simulink model of intelligent vehicle motion control system based on Simulink and Virtual Reality toolbox in Matlab:The optimization parameter of PID controller was created by Simulink Design Optimization Block,thus the data signal computed by Simulink model can be used to control and drive the car forward and turn in the VR world.The simulation system provides a platform for the research on the motion control of intelligent vehicle.Keywords:Simulink;Design Optimization;VRML;3D Animation★基金项目:江西师范大学青年成长基金(自然科学类)智能小车运动轨迹跟踪系统方案研究与实践基于Simulink/VR的智能小车运动控制仿真75科技广场2013.7图二实现智能车运动控制的Simulink模型3控制器参数优化本设计采用PID 控制,通过调节K P 、K I 和K D 三个控制参数,使智能车能更准确、快速地沿给定路径前进。
MATLABSimulink与控制系统仿真实验报告
MATLABSimulink与控制系统仿真实验报告MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink仿真的基本知识;2、熟练应用MATLAB软件建立控制系统模型。
二、实验设备电脑一台;MATLAB仿真软件一个三、实验内容1、熟悉MATLAB/Smulink仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为G(s)10。
用Simulink建立该s23s控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为Y(s)G(s)s50。
用Simulink建其中G(s)2X(s)1G(s)2s3s立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为20,而且前向通道有一个[-,]的限幅环节,图中用N 表G(s)s12s20s示,反馈通道的增益为,系统为负反馈,阶跃输入经倍的增益作用到系统。
用Simulink建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
1题1、利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
分别从信号源库、输出方式库、数学运算库、连续系统库中,用鼠标把阶跃信号发生器、示波器、传递函数和相加器4个标准功能模块选中,并将其拖至模型窗口。
基于Simulink的控制系统建模与仿真

第27页/共36页
滑艇速度控制系统模型框图
第28页/共36页
然后设置正确的系统模型参数与仿真参数对此 系统进行仿真,其中Step的Final Value值设置为1000 (即滑艇牵引力)、子系统中增益模块Gain的取值 为1/1000(即1/m)、Fcn模块的expression设置为 u^2-u(求取水的阻力)、系统仿真时间为0至100s。
0.02s。 (2)P、I、D增益模块:取值分别为1、0.01、0。
第15页/共36页
汽车动力机构参数:
(1)Gain模块:取值为1/m,即1/1000。 (2)Gain1模块:取值为b/m,即20/1000。 (3)Integrator模块:初始状态为0,即速度初值为0。 系统仿真参数:
(1)仿真时间范围:从0至1000s。 (2)求解器:使用变步长连续求解器。 4.系统仿真与分析
建模: 根据牛顿第二定律,小车受弹簧的弹性力、
阻尼器的阻尼力、加速度力,运动方程如下:
mx fx kx F x 0.2x 0.4x 0.2F u(t) 0.2F x u(t) 0.2x 0.4x
例exm1。
第1页/共36页
例2 蹦极跳系统 蹦极跳是一种挑战身体极限的运动,蹦极者系
着一根弹力绳从高处的桥梁或山崖等向下跳。在下 落的过程中,蹦极着几乎处于失重状态。应用 Simulink对蹦极跳系统进行仿真研究。
积分环节: x(n) x(n 1) u(n) 微分环节:d(n) u(n) u(n 1) 系统输出: y(n) Pu(n) Ix(n) Dd(n)
第10页/共36页
汽车动力机构 汽车动力机构是行驶控制系统的执行机构。其
基于MatlabSimulink和GUI的运动控制系统虚拟实验平台设计
谢谢观看
2、提高效率:通过计算机硬件虚拟实验平台进行实验,用户可以在短时间 内完成实验设计、模拟和测试等整个过程。此外,该平台还可以实现多用户同时 使用,提高了实验效率。
3、增强安全性:在虚拟环境中进行实验,可以避免由于误操作或者不规范 操作导致的设备损坏或者人员伤害,增强了实验的安全性。
4、丰富的实验资源:计算机硬件虚拟实验平台可以提供丰富的实验资源, 包括各种类型的CPU、内存、I/O接口等,可以满足不同用户的需求。
四、结论
计算机硬件虚拟实验平台的设计与实现具有重要的现实意义和实际应用价值。 该平台可以降低实验成本、提高实验效率、增强安全性以及提供丰富的实验资源。 为了实现该平台,我们需要选择合适的硬件设计工具、模拟和仿真工具、调试工 具和集成开
发环境等工具,并提供可视化工具帮助设计人员更好地理解和分析实验结果。 未来的计算机硬件虚拟实验平台将更加完善和强大,为计算机硬件设计和教育领 域提供更多的可能性。
2、智能控制:通过遥控器、手机App等设备控制家电设备,如空调、加湿器、 灯光、窗帘等;支持多种智能场景模式,如离家模式、会客模式、睡眠模式等; 将控制状态通过GUI界面实时展示给用户。
参考内容二
随着科学技术的发展,虚拟仿真实验平台已成为实验教学中的重要工具。虚 拟仿真实验平台可以为学生提供一个高度仿真的实验环境,帮助学生更好地理解 和掌握实验原理和方法。在众多虚拟仿真实验平台中,基于LabVIEW的平台设计 具有广泛的应用前景。
3、调试工具:调试工具可以帮助设计人员找出设计和实现中的错误。JTAG 是一种常用的调试工具,它可以用来调试硬件设计和软件代码。
4、集成开发环境(IDE):提供一个集成的开发环境,可以使得设计人员更 容易地进行设计和调试。该环境应包括编辑器、编译器、仿真器和调试器等工具。
基于Matlab和VR技术的移动机器人建模及仿真
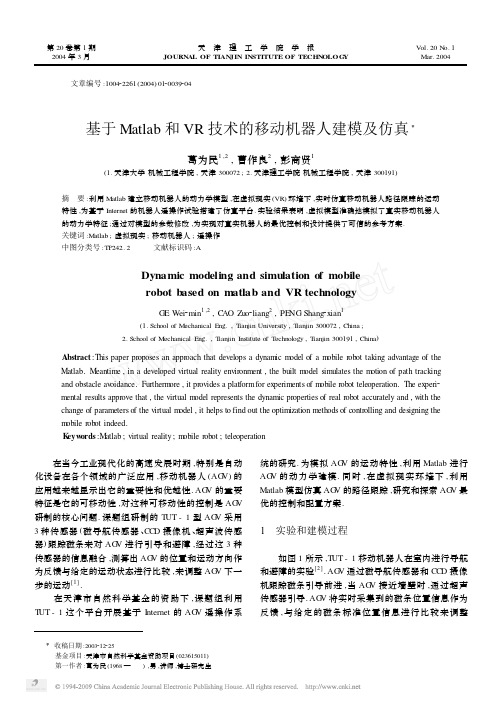
文章编号:100422261(2004)0120039204基于Matlab 和VR 技术的移动机器人建模及仿真Ξ葛为民1,2,曹作良2,彭商贤1(1.天津大学机械工程学院,天津300072;2.天津理工学院机械工程学院,天津300191)摘 要:利用Matlab 建立移动机器人的动力学模型,在虚拟现实(VR )环境下,实时仿真移动机器人路径跟踪的运动特性,为基于Internet 的机器人遥操作试验搭建了仿真平台.实验结果表明,虚拟模型准确地模拟了真实移动机器人的动力学特征;通过对模型的参数修改,为实现对真实机器人的最优控制和设计提供了可信的参考方案.关键词:Matlab ;虚拟现实;移动机器人;遥操作中图分类号:TP242.2 文献标识码:ADynamic modeling and simulation of mobilerobot based on matlab and VR technologyGE Wei 2min 1,2,C AO Zuo 2liang 2,PE NG Shang 2xian 1(1.School of Mechanical Eng.,T ianjin University ,T ianjin 300072,China ;2.School of Mechanical Eng.,T ianjin Institute of T echnology ,T ianjin 300191,China )Abstract :This paper proposes an approach that develops a dynam ic m odel of a m obile robot taking advantage of the M atlab.M eantime ,in a developed virtual reality environment ,the built m odel simulates the m otion of path tracking and obstacle av oidance.Furtherm ore ,it provides a platformfor experiments of m obile robot teleoperation.The experi 2mental results approve that ,the virtual m odel represents the dynam ic properties of real robot accurately and ,w ith the change of parameters of the virtual m odel ,it helps to find out the optim ization methods of controlling and designing the m obile robot indeed.K eyw ords :M atlab ;virtual reality ;m obile robot ;teleoperation 在当今工业现代化的高速发展时期,特别是自动化设备在各个领域的广泛应用,移动机器人(AG V )的应用越来越显示出它的重要性和优越性.AG V 的重要特征是它的可移动性,对这种可移动性的控制是AG V 研制的核心问题.课题组研制的T UT -1型AG V 采用3种传感器(磁导航传感器、CC D 摄像机、超声波传感器)跟踪磁条来对AG V 进行引导和避障,经过这3种传感器的信息融合,测算出AG V 的位置和运动方向作为反馈与给定的运动状态进行比较,来调整AG V 下一步的运动[1]. 在天津市自然科学基金的资助下,课题组利用T UT -1这个平台开展基于Internet 的AG V 遥操作系统的研究.为模拟AG V 的运动特性,利用Matlab 进行AG V 的动力学建模.同时,在虚拟现实环境下,利用Matlab 模型仿真AG V 的路径跟踪,研究和探索AG V 最优的控制和配置方案.1 实验和建模过程 如图1所示,T UT -1移动机器人在室内进行导航和避障的实验[2].AG V 通过磁导航传感器和CC D 摄像机跟踪磁条引导前进,当AG V 接近墙壁时,通过超声传感器引导.AG V 将实时采集到的磁条位置信息作为反馈,与给定的磁条标准位置信息进行比较来调整Ξ收稿日期:2003212225 基金项目:天津市自然科学基金资助项目(023615011) 第一作者:葛为民(1968— ),男,讲师,博士研究生 第20卷第1期2004年3月天 津 理 工 学 院 学 报JOURNA L OF TIAN JIN INSTITUTE OF TECHN OLOG Y V ol.20N o.1Mar.2004AG V 下一步的运动,达到实时控制AG V 跟踪磁条的目的.图1 TUT 21移动机器人Fig.1 TUT 21mobile robot 在仿真环境下,利用虚拟现实(VirtualReality )建模工具W orldUp 构建了AG V 运行的虚拟仿真环境场景,基于Matlab 构建AG V 仿真模型,通过模拟AG V 的动力学特性,来模拟AG V 的运动特行,通过在线修改虚拟AG V 的特性参数,来研究控制AG V 运动的最佳方案. 图2为AG V 车体结构简图[3].图2 车体结构简图Fig.2 Sketch of AGV body structure AG V 两后轮为驱动轮,分别由两台电机驱动,每台电机与后轮各构成一个速度闭环,为恒速输出.在工作载荷内,调节两电机的输入电压即可调节两后轮的转速;AG V 两前轮为随动轮,仅起到支撑车体的作用而无导向作用. 仿真算法原理是比较每一时刻AG V 所在位置的坐标值和终止坐标点的差别来计算处理两个坐标点之间的x 、y 值之间的误差,以当前AG V 姿态角和终止位置姿态角的差值作为输入量,来计算下一步AG V 的位移,也就是输出下一步AG V 到达的坐标和姿态角,从而控制AG V 向终点行进. 图3为AG V 运动学建模流程图.图3 AGV 动力学模型流程图Fig.3 F low ch art of the AGV dyamics model 现就其中的主要模块建模过程介绍如下[4]: 1)误差计算模块:本模块的作用是进行误差计算,通过比较机器人所在坐标点和终止坐标点的差别来计算处理两个坐标点之间的xy 值的误差和角度误差本模块接收5个信号(初始点的xy 坐标值,终止点的xy 坐标值,和角度值),输出两个信号(坐标值误差,角度误差). 初始点的y 坐标值与终止点的y 坐标值通过sum 模块进行求和运算,算出两个坐标值的差值,同时终止点的y 坐标值通过g oto 模块传出,同样的,对两个x 坐标值进行计算,求出差值.把计算出来的y 坐标值的差值与x 坐标值的差值通过T rig onometry 模块求出两值相除所得数的反正切函数,也就是求出倾斜角的弧度,所得值通过gain 模块与-1相乘,再通过sum 模块与角度值求出差值,所得差值通过Abs 模块求出绝对值,然后和π值比较(Relational operator 模块,如果满足条件,返回值为1),如果小于或等于π值,则直接与差值相乘,如果大于π值,则乘以2π然后和差值的绝对值相减,然后再与差值通过sign 模块所得的值相乘,最后两值相加,即为角度值的误差值. 2)PI D 控制模块:误差计算模块输出两个信号・04・天 津 理 工 学 院 学 报 第20卷 第1期 thetaError 和xyError ,两个信号分别通过PI D 控制模块,通过闭环回路控制,分别得出DeltaU 和Uavg ,计算公式为: theta-gain =theta-gain-pr 3theta-error (t -1)+theta-gain -int 3tinc 3sum (theta-error )+(theta-gain-der/tinc )3theta-error (t -1); y-gain =y -gain-pro 3y-error (t -1)+y-gain-int 3tinc 3sum (y -error )+(y-gain-der/tinc )3y -error (t -1); M ove-U (t -1)=theta-gain 3theta-gain-mult +y-gain 3y-gain-mult ; Delta-U (t -1)=sign (M ove-U (t -1))3in (abs (M ove-U (t -1)),23Max-M otor-V oltage ); U (t -1)=(23Max-M otor-V oltage -abs (Delta-U (t -1)))/2; 图4为PI D 控制在Matlab/Simulink下的仿真结构图.图4 PI D 控制模块仿真结构图Fig.4 Diagram of PI D simulation structure 3)扭矩计算模块:此模块用于计算AG V 轮子的扭矩,输入参数为“步进转速模块”的输出量、电动机本身的性能参数和减速器的传动比来算出扭矩,公式如下: Mn2(t -1)=G earbox-Ratio 3(K a 3U2(t -1)-K b 3omega-d2(t -1)); Mn1(t -1)=G earbox-Ratio 3(K a 3U1(t -1)-K b 3omega-d1(t -1)); 图5为扭矩计算在Matlab/Simulink 下的仿真模型结构图. 4)线性移动计算模块:此模块利用AG V 的物理参数,重量、轮子半径、轮子和地面摩擦力和在3)中输出的扭矩计算AG V 的速度和加速度.计算公式为: Accel-veh (t )=(Mn2(t -1)+Mn1(t -1)-23Front-Wheel-Friction (t -1)3Wheel-Radius )/(Mass-veh 3Wheel-Radius ); Vel-veh (t )=Vel-veh (t -1)+Accel-veh (t -1)3tinc ; Disp-veh (t )=Vel-veh (t )3tinc +0.53Accel-veh (t-1)3tinc^2; 图6为AG V 线性移动在Matlab/Simulink 下的仿真结构图.图5 扭矩计算模块仿真结构图Fig.5 Diagram of torque calc simulation structure图6 线性移动模块仿真结构图Fig.6 Diagram of linear motion calc simulation2 仿真运行 仿真系统运行环境为操作系统Windows2000Serv 2er ,虚拟现实插件为Micros oft VRM L Viewer 2.0,仿真建模和科学计算软件为Matlab Release13(Matlab V6.5/Simulink V5.0),运行界面见图7. 为检验虚拟AG V 的运行情况,现将磁条的位置坐标建立数据库,输入模型中作为路径跟踪的基准,用图形同时输出磁条路径和虚拟AG V 跟踪磁条运行的轨迹,用以直观比较.图8为经过一个周期运转后的轨迹图,左图为磁条基准路径,右图为虚拟AG V 的运行轨迹.・14・ 2004年3月 葛为民,等:基于Matlab 和VR 技术的移动机器人建模及仿真图7 仿真运行界面Fig.7 I nterface ofsimulation(a)(b )图8 基准路径和跟踪路径的比较Fig.8 Comp arison of the stand ardp ath and tracking p ath3 结 论 从图8的(b )图中可以看出,虚拟AG V 模型的运动轨迹基本上与(a )图的磁条轨迹相吻合,证明AG V 建模算法准确,参数选择合理,可以按照此参数配置修改真实AG V 属性各项指标,达到最优轨迹跟踪控制. 总之,利用Matlab 在虚拟现实环境下构建AG V 虚拟模型,达到了以下设计目标: 1)完成了真实AG V 与虚拟AG V 的匹配,真实反映了AG V 的运动学和动力学特征,为对AG V 的遥操作奠定了实现基础; 2)通过在线修改虚拟AG V 参数,快速检验对AG V的控制策略和最优配置的影响,同时减少了修改真实样机时间的延迟,降低了修改配置真实样机的费用.如AG V 的载荷问题,速度改变问题,传动比改变问题等造成的控制稳定性. 3)基于虚拟现实的仿真平台,由于VRM L 文件的特殊性,利于在Internet 上的运行分布式控制,故本仿真平台为基于Internet 的AG V 的遥操作进行了有益的尝试.参 考 文 献:[1] Weimin G e ,Zuolian Cao ,Shangxian Peng.Web -based teler 2obotics system in virtual reality environment [A].Proceedings of the SPIE Intelligent R obots and C om puter Vision C on ference [C].US A :SPIE Oct ,2003.[2] Weimin G e ,Zuoliang Cao ,Shangxian Peng.A T elerobotic Sys 2tem Based on Virtual Reality T echnique [A ].Proceedings of Virtual Reality Application in Industry [C ].US A :SPIE ,Oct ,2003.[3] 赵新华,曹作良.可移动机器人的运动学模型与控制原理[J ].机器人,1994,16(4):215—218.[4] 王沫然.S imulink 4建模及动态仿真[M].北京:电子工业出版社,2002.・24・天 津 理 工 学 院 学 报 第20卷 第1期 。
计算机仿真技术论文 实验报告 基于matlab的simulink 模型
计算机仿真技术实验报告
实验目的
(1)熟悉MATLAB中基本SIMULINK仿真环境;
(2)掌握SIMULINK进行系统仿真设计的基本步骤;
(3)了解SIMULINK中各模块库;
(4)掌握仿真系统参数设置。
实验内容
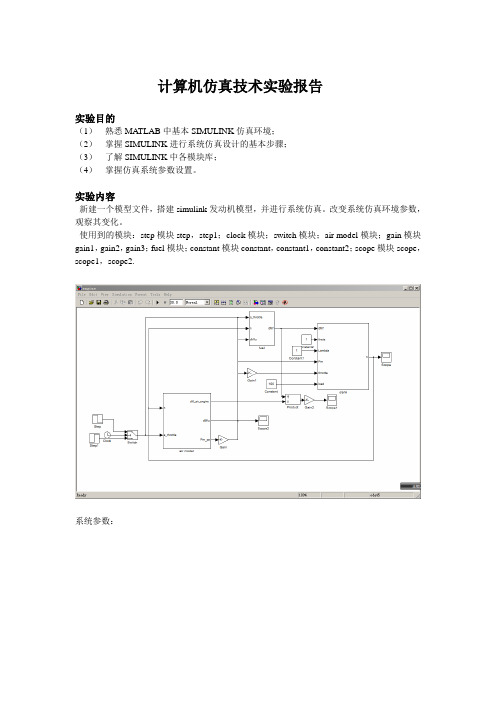
新建一个模型文件,搭建simulink发动机模型,并进行系统仿真。
改变系统仿真环境参数,观察其变化。
使用到的模块:step模块step,step1;clock模块;switch模块;air model模块;gain模块gain1,gain2,gain3;fuel模块;constant模块constant,constant1,constant2;scope模块scope,scope1,scope2.
系统参数:
运行结果
心得体会
MATALAB是一种全能的软件,但在学习应用中也会存在难度,要将知识与操作相结合,在学习过之后就需要操作学习。
Matlab能解决我们许多的问题,在我们的数学建模中更是一种实用的工具,我们应更进一步地去学习,能应用到matlab中的大部分功能,会让我们在以后的学习中有更多的帮助。
智能车辆自适应巡航控制系统建模与仿真

智能车辆自适应巡航控制系统建模与仿真 ———李以农 冀 杰 郑 玲等
图 1 车辆动力传动系统结构框图
Te = En g ( ne ,α)
(1)
·
ne = ( Te - Tp ) / Ie
(2)
式中 , En g (·) 为发动机转矩的特性函数 ; Tp 为液力变矩
器泵轮的输入转矩 ; Ie 为发动机的转动惯量 。
State Key Laboratory of Mechanical Transmissio n ,Cho ngqing U niversit y ,Cho ngqing ,400044 Abstract : In order to realize t he adaptive cruise f unctio n of intelligent vehicles , an adaptive cruise co nt rol system wit h a t wo - level st ruct ure was designed based o n f uzzy lo gic and slide mode co nt rol t heory. The system can co nt rol t hrot tle angle and brake p ressure coordinately so as to make t he vehi2 cle follow t he desired acceleratio n co mmand accurately , a logic switch rule bet ween t hrot tle and brake co nt rol was al so designed to ensure t he coordinatio ns of t his co nt rol system. The simulatio n result s show t hat t he p ropo sed co nt rol system p rovides satisfacto ry t racking performances and suitabilit y in sit uatio ns such as t ractio n , vehicle following and braking. Key words :powert rain system ; adap tive cruise co nt rol ; slide mode co nt rol ; f uzzy logic
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
想查找更多的学术资料以下资源论坛:点击这里进入鸭绿江论坛 点击这里进入萍萍家园免费帐号密码:IEEEEZCNKI维普万方Science DirectProquest等等文献检索互助免费科研资料——读书人、学术人的乐园第32卷 第3期2003年 6月常州工业大学学报(自然科学版)JOURNAL OF GUIZHOU UNIVERSITY OF TECHNOLOGY(Natural Science Edition)Vol.32No.3June.2003文章编号:100920193(2003)0320054205Ξ基于Simulink和VR工具箱的机器人行驶控制系统计算机仿真胡光艳,田会方(武汉理工大学机电学院,湖北武汉430070)摘 要:建立机器人行驶控制系统的数学模型,由此获得系统的Simulink模型(仿真模型),进行仿真分析,然后使用VR工具箱建立了一个相关的虚拟场景,并通过该工具箱的Simulink接口将机器人行驶控制系统Simulink模型与该虚拟世界建立关联,从而利用Simulink模型产生的信号数据控制和操纵虚拟世界中机器人的运动。
关键词:Simulink;VR工具箱;机器人;行驶控制系统中图分类号:TP242.6;TN911.73 文献标识码:A1 引 言1.1 机器人导航技术及虚拟现实国内外专家在移动机器人控制方面已做了大量的研究工作,与70年代的机器人相比,现在的机器人研究有两个特点:一是对机器人智能的定位有了更加符合实际的标准,也就是不要求机器人具有像人类一样的高智能,而只是要求机器人在某种程度上具有自主处理问题的能力;另一个特点是许多新技术及控制方法被引入到机器人研究中,给研究工作带来突破性进展。
将VR技术应用到移动机器人导航研究中是一种可行的方法:随着系统的日益复杂和运算量的日益增加,对计算设备能力的要求也日益提高,而多数轻便灵活型的机器人难以携带大量的计算设备,因此,将计算机和机器人分开,机器人把观察到的视觉信号和传感器信号按照制定的标准合成,然后传送到远方计算机上,由功能强大的远方计算机进行分解和处理,并发出控制信号给机器人的传动机构,以控制机器人行为,或者由机器人完成一些行走、避障类的低层操作,而高层操作则由远方高性能机器、或人工在虚拟环境中遥控完成。
本文的仿真对象是一台半自主式移动机器人,其运动和各种服务功能的实现,可以由后方的操作者利用虚拟现实技术操纵控制,所有命令均由操纵面板上的按钮和操纵杆控制发出。
1.2 Simulink及VR工具箱Simulink是一个用来对动态系统进行建模、仿真和分析的软件包,它和MA TLAB的无缝结合使得用户可以利用MA TLAB丰富的资源,建立仿真模型,监控仿真过程,分析仿真结果。
新出现的基于MA TLAB的VR工具箱允许MA TLAB/Simulink使用虚拟现实的图形技术,使得用户能直接将仿真结果以虚拟现实的形式显示出来。
可以说,对虚拟现实技术的支持使得MA TLAB/Simulink在系统仿真领域的应用上了一个新的台阶[1]。
1.3 机器人行驶控制系统的工作原理(1)机器人的速度设置通过改变遥控操作面板上操纵杆的位置来实现,即操纵杆的不同位置对应着不同的速度。
(2)测量机器人的当前速度,并求取它与指定速度的差值。
Ξ收稿日期:2003-03-03基金项目:国家863计划资助作者简介:胡光艳,女,硕士研究生;田会方,男,副教授,硕士生导师.(3)由系统差值信号驱动机器人产生相应的牵引力,并由此牵引力改变机器人的速度直到其速度稳定在指定速度为止。
本文首先建立并运行了机器人行驶控制系统的数学模型及仿真模型;然后使用VR 工具箱实现了机器人行驶控制系统的Simulink 模型与虚拟世界的关联,从而利用Simulink 模型产生的信号数据控制和操纵虚拟世界中机器人的运动。
2 建立机器人行驶控制系统的Simulink 模型并进行仿真分析2.1 机器人行驶控制系统的物理模型与数学描述1)速度操纵杆的位置变换器位置变换器是机器人行驶控制系统的输入部分,其目的是将操作面板上操纵杆的位置转换为相应的速度,由于该机器人的速度变化范围是0-6km/h ,故二者之间的数学关系可设为:v =6x , x ∈[0,1] 其中x 为速度操纵杆的位置,v 为与之对应的速度。
2)离散行驶控制器行驶控制器是整个行驶控制系统的核心部分。
简单来说,其功能是根据机器人当前速度与指定速度的差值,产生相应的牵引力。
行驶控制器为一典型的PID 控制器,其数学描述为:积分环节:x (n )=x (n -1)+u (n )微分环节:d (n )=u (n )-u (n -1)系统输出:y (n )=Pu (n )+Ix (n )+Dd (n )其中u (n )为系统输入,相当于机器人当前速度与指定速度的差值。
y (n )为系统输出,相当于机器人牵引力,x (n )为系统中的状态。
P 、I 与D 为PID 控制器的比例、积分与微分控制参数,其取值分别设为P =3,I =0.005,D =0.6.3)机器人动力机构机器人动力机构是行驶控制系统的执行机构。
其功能是在牵引力的作用下改变机器人速度,使其达到指定速度。
牵引力与速度之间的关系为F =m a +bv其中a 为机器人的加速度,v 为速度:a =d v/d t ,F 为机器人的牵引力,m =50kg 为机器人的质量,b 为阻力因子设为1.2.2 建立机器人行驶控制系统的仿真模型按照机器人行驶控制系统的物理模型与数学描述建立系统仿真模型。
在建立系统模型之前,首先给出建立模型所需的主要系统模块:(1)Math 模块库中的Slider G ain 滑动增益模块:对输入信号x 的范围进行限制。
(2)Discrete 模块库中的Unit Delay 单位延迟模块:用来实现行驶控制器(即PID 控制器)。
(3)Continuous 模块库中的Integrator 积分器模块:用来实现机器人动力机构。
(4)Subsystems 模块库中的Subsystem 子系统模块:用来对系统不同的部分进行封装。
然后建立系统模型,并将位置变换器、行驶控制器、机器人动力机构封装到不同的子系统之中,如图1所示。
图1 机器人行驶控制系统55第3期胡光艳,等:基于Simulink 和VR 工具箱的机器人行驶控制系统计算机仿真 图1.1 位置变换器图1.2 行驶控制器子系统图1.3 动力机构子系统2.3 系统模块参数设置与仿真参数设置在建立系统模型之后,按照系统的要求设置系统模块参数与仿真参数。
1)速度操纵杆的位置变换器参数(1)Slider G ain 模块:最小值Low 为0,最大值High 为1,初始取值设为0.5.(2)G ain 模块:增益取值为6.2)行驶控制器参数(1)所有Unit Delay 模块:初始状态为0,采样时间为0.02s.(2)P 、I 、D 增益模块:取值分别为3、0.005、0.6.3)机器人动力结构参数(1)G ain 模块:取值为1/m ,即1/50.(2)G ain1模块:取值为b/m ,即1/50.(3)Integrator 模块:初始状态为0,即速度初始值为0.4)系统仿真参数(1)仿真时间范围:从0至100s.(2)求解器:由于本系统为混合系统(系统中既有连续信号,又有离散信号),必须考虑系统中连续信号与离散信号采样时间之间的匹配问题,因此选用变步长连续求解器。
其余模块参数与仿真参数均使用默认取值。
2.4 系统仿真与分析在对系统模块参数与仿真参数设置之后,对系统进行仿真分析。
分别使用两组不同的PID 控制参数对系统进行仿真,其结果如图2所示。
65 贵 州 工 业 大 学 学 报 (自然科学版)2003年P =3,I =0.005,D =0.6P =5,I =0.002,D =2图2 不同控制参数下的仿真结果机器人行驶控制系统的目的是使机器人在较短时间内平稳地达到指定速度。
从图2的仿真结果中可以看出,在行驶控制器控制参数取值为P =3、I =0.005、D =0.6时,机器人的速度并非直接达到指定的速度,而是经过一个振荡衰减过程,最后逐渐过渡到指定速度。
此时行驶控制系统为典型的二阶欠阻尼控制系统。
对于PID 控制器而言,增加微分控制参数D 可以减小系统超调量,缩短系统调节时间;增加积分控制参数I 可以增加系统超调量,延长系统调节时间;而增加比例控制参数P 值可以缩短系统调节时间。
由于行驶控制器为一离散PID 控制器,所以适当增加控制器参数的P 、D 取值,减小I 取值可以改善系统的性能,这一点可以从系统在控制参数P =5、I =0.002、D =2下的仿真结果中看出。
3 仿真结果的虚拟演示3.1 建立虚拟现实所需的VRML 文件VRML (Virtual Reality Modeling Language 虚拟现实建模语言)是一种标准的虚拟现实建模语言,可用来创建三维实体,并可对对象编程以实现交互性。
在MA TLAB 的虚拟现实工具箱中就主要采用这种语言来描述虚拟现实。
值得注意的是,VRML 语言下描述三维空间时,其坐标轴排列顺序和常规使用的坐标系不完全一致,其规定如图3所示:图3 VRML 的空间坐标系图4 虚拟世界建模V -Realm Builder 2.0版是一个编辑VRML 程序的实用可视化工具,它允许用户搭建虚拟现实所需要的场景和素材。
正如其它功能强大的三维建模软件(如3DS MAX )一样,V -Realm Builder 2.0为用户提供了建模的直观接口,对象库、材质库、纹理库中的样品可直接应用到用户的虚拟场景中;V -Realm Builder 2.0生成的三维物体和虚拟世界可以用支持VRML 的浏览器观察到。
V -Realm Builder 2.0的主界面如图4所示,图中已经搭建了机器人模型以及简单的场景,包括天空、地面等。
将该素材保存为robot.wrl 文件。
75第3期胡光艳,等:基于Simulink 和VR 工具箱的机器人行驶控制系统计算机仿真 3.2 Simulink 下虚拟现实技术应用上面建立的robot.wrl 文件是由V -ream Builder 软件直接绘制出来的静态图形,要使其“动”起来,我们同样可以用VRML 语言编写程序,也可以利用MA TLAB 虚拟现实工具箱提供的一系列函数来操作3.wrl 文件中描述的对象的属性;这里研究的是Simulink 下虚拟现实技术的应用,而且前面已经建立起机器人运动的Simulink 模型和相关的虚拟世界,我们将尝试把二者连接起来,利用Simulink 模型产生的信号数据控制和操纵虚拟世界中机器人的运动。