光电鼠标原理及电路
光电鼠标内部结构
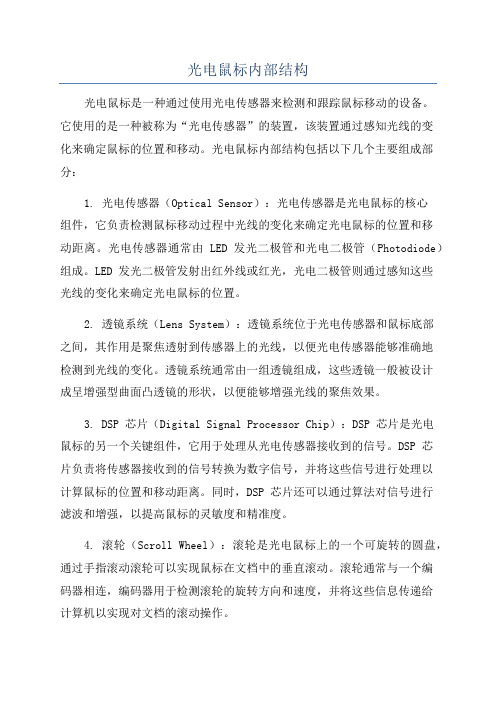
光电鼠标内部结构光电鼠标是一种通过使用光电传感器来检测和跟踪鼠标移动的设备。
它使用的是一种被称为“光电传感器”的装置,该装置通过感知光线的变化来确定鼠标的位置和移动。
光电鼠标内部结构包括以下几个主要组成部分:1. 光电传感器(Optical Sensor):光电传感器是光电鼠标的核心组件,它负责检测鼠标移动过程中光线的变化来确定光电鼠标的位置和移动距离。
光电传感器通常由 LED 发光二极管和光电二极管(Photodiode)组成。
LED 发光二极管发射出红外线或红光,光电二极管则通过感知这些光线的变化来确定光电鼠标的位置。
2. 透镜系统(Lens System):透镜系统位于光电传感器和鼠标底部之间,其作用是聚焦透射到传感器上的光线,以便光电传感器能够准确地检测到光线的变化。
透镜系统通常由一组透镜组成,这些透镜一般被设计成呈增强型曲面凸透镜的形状,以便能够增强光线的聚焦效果。
3. DSP 芯片(Digital Signal Processor Chip):DSP 芯片是光电鼠标的另一个关键组件,它用于处理从光电传感器接收到的信号。
DSP 芯片负责将传感器接收到的信号转换为数字信号,并将这些信号进行处理以计算鼠标的位置和移动距离。
同时,DSP 芯片还可以通过算法对信号进行滤波和增强,以提高鼠标的灵敏度和精准度。
4. 滚轮(Scroll Wheel):滚轮是光电鼠标上的一个可旋转的圆盘,通过手指滚动滚轮可以实现鼠标在文档中的垂直滚动。
滚轮通常与一个编码器相连,编码器用于检测滚轮的旋转方向和速度,并将这些信息传递给计算机以实现对文档的滚动操作。
5. 电路板(Circuit Board):电路板是光电鼠标内部的一个重要组成部分,它上面集成了光电传感器、DSP 芯片、滚轮编码器以及其他的控制电路。
电路板也连接着光电鼠标的 USB 接口,以便将鼠标的信号传输给计算机。
6. 设备外壳(Device Casing):设备外壳是光电鼠标的外部包装,为内部组件提供保护和支持。
毕业设计75光电鼠标原理及其应用研究
第一章前言1.1鼠标的发展历史鼠标自从诞生到今天,已经有38个年头了,这38年来,鼠标无论在性能还是工作原理上都有了许多变化。
“mouse”换代发展反映了计算机技术的普及和应用电子技术的突飞猛进。
同时也证明了一个结论:原创+科技进步=产品的生命。
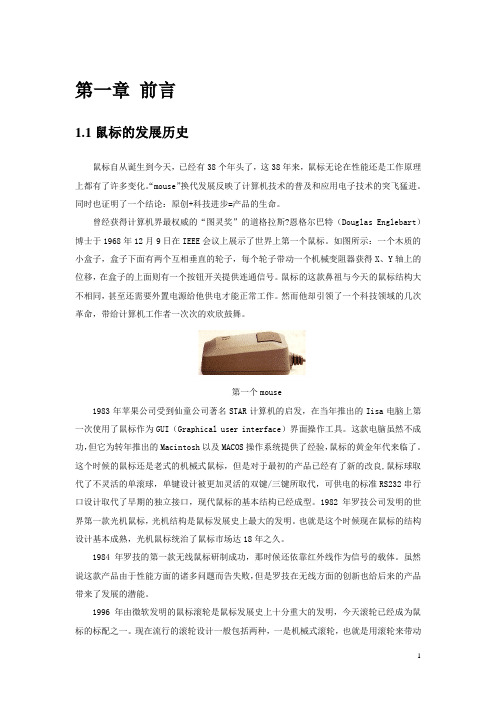
曾经获得计算机界最权威的“图灵奖”的道格拉斯?恩格尔巴特(Douglas Englebart)博士于1968年12月9日在IEEE会议上展示了世界上第一个鼠标。
如图所示:一个木质的小盒子,盒子下面有两个互相垂直的轮子,每个轮子带动一个机械变阻器获得X、Y轴上的位移,在盒子的上面则有一个按钮开关提供连通信号。
鼠标的这款鼻祖与今天的鼠标结构大不相同,甚至还需要外置电源给他供电才能正常工作。
然而他却引领了一个科技领域的几次革命,带给计算机工作者一次次的欢欣鼓舞。
第一个mouse1983年苹果公司受到仙童公司著名STAR计算机的启发,在当年推出的Iisa电脑上第一次使用了鼠标作为GUI(Graphical user interface)界面操作工具。
这款电脑虽然不成功,但它为转年推出的Macintosh以及MACOS操作系统提供了经验,鼠标的黄金年代来临了。
这个时候的鼠标还是老式的机械式鼠标,但是对于最初的产品已经有了新的改良,鼠标球取代了不灵活的单滚球,单键设计被更加灵活的双键/三键所取代,可供电的标准RS232串行口设计取代了早期的独立接口,现代鼠标的基本结构已经成型。
1982年罗技公司发明的世界第一款光机鼠标,光机结构是鼠标发展史上最大的发明。
也就是这个时候现在鼠标的结构设计基本成熟,光机鼠标统治了鼠标市场达18年之久。
1984年罗技的第一款无线鼠标研制成功,那时候还依靠红外线作为信号的载体。
虽然说这款产品由于性能方面的诸多问题而告失败,但是罗技在无线方面的创新也给后来的产品带来了发展的潜能。
1996年由微软发明的鼠标滚轮是鼠标发展史上十分重大的发明,今天滚轮已经成为鼠标的标配之一。
光电鼠标原理
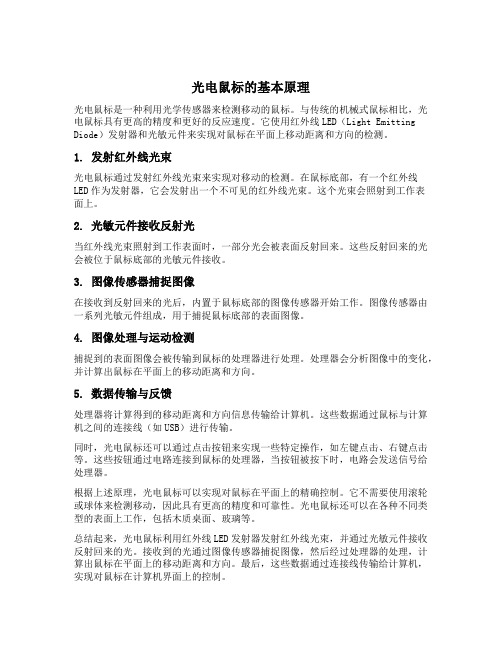
光电鼠标的基本原理光电鼠标是一种利用光学传感器来检测移动的鼠标。
与传统的机械式鼠标相比,光电鼠标具有更高的精度和更好的反应速度。
它使用红外线LED(Light Emitting Diode)发射器和光敏元件来实现对鼠标在平面上移动距离和方向的检测。
1. 发射红外线光束光电鼠标通过发射红外线光束来实现对移动的检测。
在鼠标底部,有一个红外线LED作为发射器,它会发射出一个不可见的红外线光束。
这个光束会照射到工作表面上。
2. 光敏元件接收反射光当红外线光束照射到工作表面时,一部分光会被表面反射回来。
这些反射回来的光会被位于鼠标底部的光敏元件接收。
3. 图像传感器捕捉图像在接收到反射回来的光后,内置于鼠标底部的图像传感器开始工作。
图像传感器由一系列光敏元件组成,用于捕捉鼠标底部的表面图像。
4. 图像处理与运动检测捕捉到的表面图像会被传输到鼠标的处理器进行处理。
处理器会分析图像中的变化,并计算出鼠标在平面上的移动距离和方向。
5. 数据传输与反馈处理器将计算得到的移动距离和方向信息传输给计算机。
这些数据通过鼠标与计算机之间的连接线(如USB)进行传输。
同时,光电鼠标还可以通过点击按钮来实现一些特定操作,如左键点击、右键点击等。
这些按钮通过电路连接到鼠标的处理器,当按钮被按下时,电路会发送信号给处理器。
根据上述原理,光电鼠标可以实现对鼠标在平面上的精确控制。
它不需要使用滚轮或球体来检测移动,因此具有更高的精度和可靠性。
光电鼠标还可以在各种不同类型的表面上工作,包括木质桌面、玻璃等。
总结起来,光电鼠标利用红外线LED发射器发射红外线光束,并通过光敏元件接收反射回来的光。
接收到的光通过图像传感器捕捉图像,然后经过处理器的处理,计算出鼠标在平面上的移动距离和方向。
最后,这些数据通过连接线传输给计算机,实现对鼠标在计算机界面上的控制。
总之,光电鼠标通过光学原理实现了对鼠标移动的检测和控制,提供了更精确、快速和可靠的操作体验。
光电鼠标制作总结报告
闽南师范大学计算机科学与工程系
计算机原理课程设计总结报告
学生学号
1108000251
姓名
蔡福平
专业
网络工程
班级
2班
所属学期
2013-2014学年第一学期
1、项目介绍与设计目的
制作光电鼠标
学会如何制作鼠标,对鼠标的内部结构有更深入的了解。
二、项目环境要求
焊锡1卷、高温海绵1块、松香1盒、焊枪1把、烙铁架1个、镊子1把、螺丝刀1把以及鼠标的各个零件若干。
最后,感谢学校及老师给我们提供这样的机会,谢谢你们!在此,我希望以后学校能多开类似这类的实践课,真正做到理论与实践相结合,提高我们的专业技能。
六、指导教师意见
指导教师(签名):
年月日
注:该表格由学生填写,内容采用小四号宋体,表格大小随内容调节。
光电鼠标电路图:
4、项目电路实现步骤
1.将鼠标的各个零件按照ppt上所示,依次焊接在电路板上,焊接时注意(零件的方向,焊锡不能太多防止两个接线柱互连)。
2.所有零件都焊接好之后的电路板如图所示。
3.接下来将电路板和滚轮装到鼠标的底座上,接着盖上鼠标盖,用螺丝刀把螺丝拧紧。
4.鼠标制作完成之后的样子,如图所示。
5.测试鼠标是否可以使用。
将鼠标插入电脑USB接口,首先可以看到鼠标指示灯亮,呈现明亮的红色,之后,测试鼠标左键、右键、滚轮是否正常。经实践发现,各键功能均正常,可以正常使用(如,浏览网页,文档编辑等),但如果用来玩游戏,反应还是不如买的高级鼠标那样的灵敏。
5、体会与感想
通过这次制作鼠标,对鼠标有了更深入的了解,知道鼠标的构造,在制作过程中一开始使用焊枪不太熟练,经过多次尝试之后,熟练掌握了焊枪的使用,最后鼠标制作成功,并且把自己一个坏的鼠标也修好了,挺开心的。总的来说,这次的鼠标制作我不仅学到了理论知识,也提高了实践动手能力。
无线光电鼠标原理

无线光电鼠标原理无线光电鼠标是一种利用光电传感器技术,通过发射和接收光信号来实现鼠标移动控制的设备。
它与传统的有线光电鼠标不同,无需通过数据线与计算机相连,而是通过无线信号进行通信。
无线光电鼠标的工作原理如下:1. 发射光信号:无线光电鼠标内部装有一个发射光电传感器,它能够产生一束红外线或激光光束。
当鼠标移动时,发射器会自动发射光信号。
2. 光信号反射:光信号穿过鼠标底部的透明窗口,照射到使用鼠标的表面。
光信号照射在表面上,会被表面反射回来。
3. 光电传感器接收信号:无线光电鼠标底部装有一个接收光电传感器,它能够接收反射回来的光信号。
接收器会将光信号转化为电信号。
4. 信号处理:接收到的电信号会被经过处理电路进行放大和滤波处理。
放大后的信号会被转化成数学数据,用于计算鼠标移动的速度和方向。
5. 无线传输:处理后的数学数据会被编码为数字信号,然后通过无线传输模块转换为无线信号。
无线信号可以通过射频(RF)技术或蓝牙技术传输给计算机。
6. 计算机接收和处理信号:计算机通过无线接收器接收到无线鼠标发送的信号,并进行解码处理。
解码后的信号会传递给操作系统,然后系统根据信号确定光标的位置和移动。
无线光电鼠标的优点有:1. 无线连接:无线光电鼠标无需通过数据线与计算机相连,使用更加灵活方便。
2. 移动自由度高:无线光电鼠标可以在更大的范围内进行操作,移动自由度更高。
3. 接收器多设备共用:无线光电鼠标的接收器可以同时连接多个无线设备,如键盘、耳机等,方便使用。
4. 电池寿命较长:无线光电鼠标采用低功耗设计,搭配适配的电池,可以实现长时间使用。
无线光电鼠标的缺点有:1. 信号干扰:由于无线传输需要通过无线信号,所以在信号干扰较大的环境下,可能会导致鼠标的信号传输受到干扰,影响使用效果。
2. 信号延迟:由于无线信号需要经过信号传输和解码处理,与有线光电鼠标相比可能存在一定的信号延迟。
3. 电池需更换:由于无线光电鼠标需要使用电池供电,当电池耗尽时需要更换电池,增加了使用成本和维护成本。
激光鼠标原理

激光鼠标原理
激光鼠标是一种采用激光技术的光电式鼠标,其工作原理是利用激光发射器发出一束红外激光,然后通过光电传感器接收反射光信号,从而实现对光标的控制。
具体而言,激光鼠标内部包含一个激光发射器和一个光电传感器。
激光发射器发出一束激光,这束激光经过一个特殊的镜片(透镜)聚焦成一个很小的激光点。
当激光点照射到平面或者其他表面时,会发生反射,反射光通过透镜进入光电传感器。
光电传感器是一个光敏元件,它的主要作用是接收反射光信号并将其转化为电信号。
当激光点从鼠标底部射向桌面时,反射光会落在光电传感器上。
光电传感器对接收到的反射光进行分析和处理,并通过与电脑连接的数据线将处理后的信号传送给电脑。
激光鼠标的工作原理利用了激光的高亮度和高对比度的特点。
相比于传统的光学鼠标,激光鼠标能够在更多不同表面上保持良好的跟踪效果。
此外,激光鼠标还具有更高的精度和更快的响应速度,可以实现更准确和流畅的鼠标控制。
总的来说,激光鼠标通过激光发射器发出一束激光,并通过光电传感器接收反射光信号,从而实现对光标的控制。
其优势在于较高的精度、更好的跟踪效果和更快的响应速度,使其成为现代电脑使用中常见的鼠标类型之一。
光电鼠标 工作原理

光电鼠标工作原理光电鼠标是一种常见的计算机输入设备,它通过利用光学原理来感知鼠标的移动和点击操作。
光电鼠标工作原理是基于光电效应和图像处理技术实现的。
光电鼠标内部包含了一个光电传感器,它由红外线发射器和光敏二极管组成。
当鼠标在移动时,红外线发射器会发出红外线光束,照射到鼠标底部的工作面上。
工作面通常安装有一个特殊的纹理结构,以便更好地反射红外线。
当红外线光束照射到工作面上时,一部分光会被工作面反射回来,其中一部分会被光敏二极管接收。
光敏二极管接收到的光信号会被转换成电信号,并通过电路传输到计算机主机。
为了准确地感知鼠标的移动距离和方向,光电鼠标还需要进行图像处理。
电路中会有一个处理器,它会接收到光敏二极管传来的电信号,并进行数字化处理。
处理器会通过比较连续两帧图像之间的差异,来确定鼠标的移动方向和距离。
具体而言,处理器会将连续两帧图像进行比较,找出两帧图像之间的不同之处,这些不同之处代表着鼠标的移动。
通过分析不同之处的位置和数量,处理器可以计算出鼠标的移动方向和距离。
为了使光电鼠标能够在不同表面上工作,光电鼠标通常还会配备一个特殊的底部结构,称为光学引导系统。
光学引导系统能够将红外线光束引导到工作面上,并确保光线的稳定和一致性,从而提高光电鼠标的精确度和稳定性。
总结一下,光电鼠标的工作原理是通过红外线光束照射到工作面上,然后通过光敏二极管接收反射回来的光信号,并将其转换成电信号。
电信号经过图像处理,计算出鼠标的移动方向和距离。
通过光学引导系统的帮助,光电鼠标能够在不同表面上准确地工作。
光电鼠标相比于机械鼠标具有更高的精确度和稳定性。
由于采用了光学原理,光电鼠标不需要使用机械滚轮,因此也减少了鼠标的磨损和故障率。
此外,光电鼠标可以在几乎任何表面上工作,包括光滑的玻璃面板。
光电鼠标的工作原理使其成为现代计算机的重要输入设备之一。
无论是在办公室还是家庭使用,光电鼠标都能够提供准确、稳定和便捷的操作体验。
光电鼠标内部结构
光学感应器光学感应器是光电鼠标的核心,目前能够生产光学感应器的厂家只有安捷伦、微软和罗技三家公司。
其中,安捷伦公司的光学感应器使用十分广泛,除了微软的全部和罗技的部分光电鼠标之外,其他的光电鼠标基本上都采用了安捷伦公司的光学感应器。
图1:光电鼠标内部的光学感应器安捷伦公司的光学感应器主要由CMOS感光块(低档摄像头上采用的感光元件)和DSP组成。
CMOS感光块负责采集、接收由鼠标底部光学透镜传递过来的光线(并同步成像),然后CMOS感光块会将一帧帧生成的图像交由其内部的DSP进行运算和比较,通过图像的比较,便可实现鼠标所在位置的定位工作。
图2:光学感应器内部的组成方式图1是方正光电鼠内部的光学感应器,它采用的是安捷伦公司的H2000-A0214光学感应元件,其芯片内部的组成方式可参见图2。
图3是H2000-A0214光学感应器的背面,从图中我们可以看到,芯片上有一个小孔,这个小孔用来接收由鼠部底部的光学透镜传送过来的图像。
图3光学感应器背面的小孔用来接收由鼠部底部的光学透镜传送过来的图像[编辑]光电鼠标的控制芯片控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通(桥接)及各种信号的传送和收取。
我们可以将其理解成是光电鼠标中的“管家婆”。
图4是罗技公司的CP5919AM控制芯片,它可以配合安捷伦的H2000-A0214光学感应元件,实现与主板USB接口之间的桥接。
当然,它也具备了一块控制芯片所应该具备的控制、传输、协调等功能。
这里有一个非常重要的概念大家应该知道,就是dpi对鼠标定位的影响。
dpi是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就越少,定位精度就低;dpi越大,用来定位点数就多,定位精度就高。
图4罗技公司的CP5919AM控制芯片通常情况下,传统机械式鼠标的扫描精度都在200dpi以下,而光电鼠标则能达到400甚至800dpi,这就是为什么光电鼠标在定位精度上能够轻松超过机械式鼠标的主要原因。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传统光学鼠标的工作原理
传统光学鼠标工作原理示意图
光学跟踪引擎部分横界面示意图
光学鼠标主要由四部分的核心组件构成,分别是发光二极管、透镜组件、光学引擎(Optical Engine)以及控制芯片组成。
光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的表面所产生的阴影,然后再通过平面的折射透过另外一块透镜反馈到传感器上。
当鼠标移动的时候,成像传感器录得连续的图案,然后通过“数字信号处理器”(DSP)对每张图片的前后对比分析处理,以判断鼠标移动的方向以及位移,从而得出鼠标x, y方向的移动数值。
再通过SPI传给鼠标的微型控制单元(Micro Controller Unit)。
鼠标的处理器对这些数值处理之后,传给电脑主机。
传统的光电鼠标采样频率约为3000 Frames/sec(帧/秒),也就是说它在一秒钟内只能采集和处理3000张图像。
根据上面所讲述的光学鼠标工作原理,我们可以了解到,影响鼠标性能的主要因素有哪些。
第一,成像传感器。
成像的质量高低,直接影响下面的数据的进一步加工处理。
第二,DSP处理器。
DSP处理器输出的x,y轴数据流,影响鼠标的移动和定位性能。
第三,SPI于MCU之间的配合。
数据的传输具有一定的时间周期性(称为数据回报率),而且它们之间的周期也有所不同,SPI主要有四种工作模式,另外鼠标采用不同的MCU,与电脑之间的传输频率也会有所不同,例如125MHZ、8毫秒;500MHz,2毫秒,我们可以简单的认为MCU可以每8毫秒向电脑发送一次数据,目前已经有三家厂商(罗技、Razer、Laview)使用了2毫秒的MCU,全速USB设计,因此数据从SPI传送到MCU,以及从MCU传输到主机电脑,传输时间上的配合尤为重要。
光电鼠标电路图
什么是激光鼠标?
激光鼠标其实也是光电鼠标,只不过是用激光代替了普通的LED光.好处是可以通过更多的表面,因为激光是Coherent Light(相干光),几乎单一的
波长,即使经过长距离的传播依然能保持其强度和波形;而LED 光则是Incoherent Light(非相干光)。
激光鼠标传感器获得影像的过程是根据,激光照射在物体表面所产生的干涉条纹而形成的光斑点反射到传感器上获得的,而传统的光学鼠标是通过照射粗糙的表面所产生的阴影来获得。
因此激光能对表面的图像产生更大的反差,从而使得“CMOS成像传感器”得到的图像更容易辨别,提高鼠标的定位精准性。
什么是鼠标的全速USB技术?
全速USB技术是指USB Full Speed, 相对于传统的Low Speed的每秒1.5Mb传输速度,它的传输速率为可达12Mb每秒。
因为两者都以6500fps为原始数据,游戏过程中发生的大量的鼠标移动,传统鼠标所使用1.5Mb/s的Low Speed USB接口在特定的环境下有可能成为数据流的瓶颈。
因此有必要将接口的全速速度提升到Full Speed,使鼠标的实际移动反映到屏幕光标时更加实时。