弹性力学与有限元完整版共164页
合集下载
弹性力学有限元法.ppt

2021/3/11
13
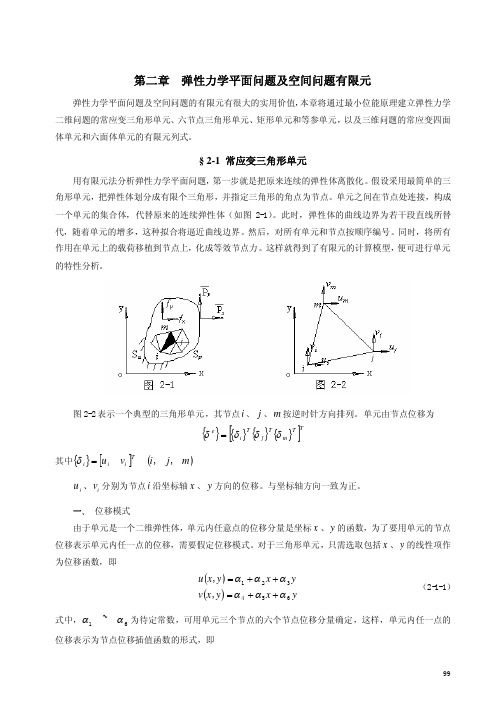
在离散体中任取一个单元,三个节点按逆时针方向顺序编
号为i,j,m。节点坐标分别表示为(xi,yi),(xj,yj), (xm,ym)。
2021/3/11
14
对于弹性力学平面问题,一个三角形单元上的每 个节点应有2个位移分量,则三角形单元共有6个自 由度: ui , vi ,u j , v j ,um , vm 。
u x
K
矩形单元:采用双线性位移模式,单元内的应力是线性
变化的。
u kx2 mx
(kx2 mx) x
3. 薄板弯曲单元和薄板单元
2021/3/11
7
4. 多面体单元
2021/3/11
8
5. 等参数单元:单元内任一点的位移与节点位移之间的关系 恰好和该点的坐标与节点坐标之间的关系相同。
任意四边形的边一般不平行于坐标轴,沿单元边的位 移将按抛物线变化,而不是线性变化。
2021/3/11
2
(2)分析单元的力学性质 列出单元节点和节点位移之间的关系式。应用几何方程和
物理方程来建立力和位移的方程式,导出单元刚度矩阵。
节点载荷和节点位移之间的关系式为:
Fe Kee
K e 为单元刚度矩阵。
(3)计算等效节点力:用等效的节点力来代替所有在单元 上的力。
2021/3/11
元位移模式。
u(x, v(x,
y) y)
Ni
(x, 0
y)
0 N j (x, y) Ni (x, y) 0
0 Nm (x, y) N j (x, y) 0
0
Nm
(
x,
y)
u Ne
2021/3/11
18
9第2章弹性力学平面问题及空间问题有限元
v u v 2 , y 6 , xy 3 5 都是常量,即线性位移模式反映 x y y x
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
弹性力学及有限元

• 研究方法的差别造成弹性力学与材料 力学问题的最大不同。
• 材料力学:常微分方程,数学求解没有困难。 • 弹性力学:偏微分方程边值问题,在数学上 求解困难重重,除了少数特殊问题,一般 弹性体问题很难得到解析解。
§1.2 弹性力学基本概念(重点) •外力、应力、形变、位移
•外力分为:体积力(体力) 表面力(面力)
3、弹性力学基本假定:
•连续性
•均匀性
•各向同性
•完全弹性
•小变形假定
(符合前四条假设的物体称为理想弹性体)
4、弹性力学的研究方法:
•已知:边界形状,材料性质,体力,面力,约束 •求解:应力、形变和位移 •解法: (1)根据力的平衡条件建立平衡微分方程; (2)根据应变和位移间的几何条件建立几何方程; (3)根据应力和应变间的物理条件建立物理方程;
——忽略位移、形变和应力等分量的高阶小 量,使基本方程成为线性的偏微分方程组。
*弹性力学的发展
弹性力学是一门有悠久历史的学科,早期 研究可以追溯到1678年,胡克(R.Hooke) 发现胡克定律。 这一时期的研究工作主要是通过实验方法 探索物体的受力与变形之间的关系。
•近代弹性力学的研究是 从19世纪开始的。
轴正方向为正,沿坐标轴负方向为负。
单位:N/m2, 量纲是L-1MT-2(N=LT-2M)
•内力:物体受外力作用后,内部不同部分之
间相互作用的力。
应力
弹性体内任一点 P 其邻近面积为 A
A 上的内力为 F
F lim p A0 A
•和体力、面力不同,应力通常不用它沿坐标 轴的分量(进行某些公式推导时除外),原因: 这些分量与物体的形变或材料强度没有直接的 关系。 •与物体的形变或材料强度直接相关的则是截 面法线方向和切线方向的分量,即正应力和 切应力,分别记为 σ,τ
弹性力学及有限元
热传导案例
总结词
热传导是有限元分析中用于模拟物体内部热量传递规律的应用之一。
详细描述
在电子、机械、化工和材料等领域,热传导分析用于研究材料的热性能、热应力和热变形等。通过有 限元方法,可以模拟物体内部的热量传递过程,预测温度分布和热应力分布,优化材料和系统的热设 计。
06
结论展望
结论
01
02
有限元分析
有限元分析是一种数值分析方法,通过将复杂的物体或系统离散 化为有限个小的单元(或称为元素),并分析这些单元的应力、 应变和位移,从而对整个物体或系统的行为进行预测和分析。
主题的重要性
工程应用
弹性力学和有限元分析在工程领域中具有广泛的应用,如结 构分析、机械设计、航空航天、土木工程等。通过这些方法 ,工程师可以更准确地预测和分析结构的性能,优化设计, 提高安全性。
03
04
研究意义
弹性力学及有限元分析在工程 领域具有广泛应用,为复杂结 构的分析提供了有效方法。
主要成果
本文系统地介绍了弹性力学的 基本原理和有限元分析的方法 ,并通过实例验证了其有效性 。
研究限制
由于时间和资源的限制,本研 究未能涵盖所有相关领域,未 来研究可进一步拓展。
对实践的指导意义
本文为实际工程中的结构分析 提供了理论依据和实践指导, 有助于提高结构的安全性和稳 定性。
优势
有限元方法具有广泛的适用性,可以用于求解各种复杂的物理问题;能够处理 复杂的几何形状和边界条件;可以通过增加单元数目来提高解的精度;可以方 便地处理非线性问题和材料非均质性问题等。
局限性
有限元方法需要较大的计算资源和时间,尤其对于大规模问题;对于某些特殊 问题(如高速冲击、爆炸等),需要采用特殊处理方法;对于多物理场耦合问 题,需要采用多场耦合有限元方法等。
弹性力学与有限元分析共98页

➢ 当物体的厚度有突变或物体由不同材料组成时,不 要把厚度不同或材料不同的区域划分在统一单元。
➢ 节点编号,原则上可任意,但它影响基本方程系数 矩阵的带宽,所以单元的两个相邻节点编号之差 应尽可能小。
五、位移插值函数与形函数
结构离散化后,要对单元进行力学特性分析,即 确定单元节点力与节点位移之间的关系。为分析并确 定这一关系,需要把单元中任一点的位移分量表示为 坐标的某种函数,这一函数称为单元的位移插值函数。 它反映了单元的位移形态并决定着单元的力学特性。 由于这种函数关系在解题前是未知的,而在单元分析 时又必须用到,因此要事先假定,所假定的位移插值 函数须满足以下两个条件:
这样,平面应变问题只需研究以下8个独立未知函数:
x
y
xy
U V
x y
xy
且它们只是 x, y 的函数,与 z无关。工程实际中,炮
筒、桥梁支座的柱形辊轴等都可简化为平面应变问题。 所以无论是平面应力问题还是平面应变问题,都只
需研究3个应力分量 x,y,xy,3个应变分量 x,y,xy
高速旋转的薄圆盘等都可简化为平面应力问题。
2、平面应变问题
这类问题的位移分量中有一个为零(如z向位移W ), 其余两个方向的位移U和 V与z无关。其特点是:
几何形状特点:物体沿一个方向很长(如 z向),且垂
直于 z轴的截面相同,即为一个等棱柱
WVUz
体,位移条件或支承条件沿z向也相同。
所受外力特点:在柱体侧面上受到垂直于 z轴且不沿
➢ 三角形单元的3条边长(或3个顶角)之间不应相 差太大,即单元划分中不应出现过大的钝角或过
小的锐角,否则,计算误差较大。
➢ 在应力较大和应力集中的区域,单元应划分细一 些,以提高精度。
弹性力学与有限元第四章
S
V
第四章 能量原理及其变分法
其中,外力在实际位移上所做的功
W Xu Yv Zwds Xu Yv ZwdV
S
V
取其负号,定义为外力势能(以外力为零的自然状态的势
能为零),将弹性体的应变能和外力势能之和,定义为系
统的总势能,记为
P U W
U Xu Yv Zwds Xu Yv ZwdV ]
第四章 能量原理及其变分法
弹性力学的变分原理: 由微元体出发所建立的弹性力学的边界条件问题与从整个 物体在平衡时某些泛函的极值问题是等价的。
变分法是研究泛函求极值的方法。弹性力学问题的变分法, 也称为能量法,是和弹性体的应变能或应变余能密切相关的, 是有限元法的基础。
第四章 能量原理及其变分法
§ 4-1 应变能的概念及其表达式
最小势能原理是弹性力学的一个变分原理,又因弹性力学 变分原理的泛函是表示某种能量,如总势能 P ,所以弹性力 学变分原理有时也称为弹性力学能量原理。
x
u
dV1
x x
u
x
u x
dV1
x x
u
x
x
dV1
其中 dV1 dxdy 1为微元体的体积。同样,xy所作的虚功为
体积力所作的虚功为
xy
y
u
xy
u
y
dV1
Xdxdy.1u XudV1
处微元体上所有力所作的虚功之和为
dW2
x
x
xy
弹性力学与有限元

yσ
x
)
M
EI
y,
xy
2(1 E
) xy
0。
Chapter2
- 30 -
第三节 位移分量的求出
2. 代入几何方程求位移,
u x
x
M EI
y,
(a)
v y
y
M
EI
y,
(b)
v x
u y
xy
0。
(c)
Chapter2
- 31 -
第三节 位移分量的求出
⑴ 对式(a)两边乘 d,x积分得
u
ax2 bxy cy2 1.对应于 ax2,应力分量 x 0, y 2a, xy yx 0 。
Chapter2
-9-
第一节 逆解法与半逆解法 多项式解答
结论:应力函数 ax2 能解决矩形板在 y 方向受均布拉力
(设 a 0)或均布压力(设 a 0 )的问题。如图3-1(a)。
Chapter2
- 18 -
第一节 逆解法与半逆解法 多项式解答
⑷ 由式(d),求出应力; ⑸ 校核全部应力边界条件(对于多连体,
还须满足位移单值条件). 如能满足,则为正确解答;否则修改假 设,重新求解。
Chapter2
- 19 -
第一节 逆解法与半逆解法 多项式解答
思考题 1. 在单连体中,应力函数必须满足哪些条 件?逆解法和半逆解法是如何满足这些条 件的? 2. 试比较逆解法和半逆解法的区别。
3F 2h
(1
4
y2 h2
);
fx
(σ x )xl
12Fl h3
y,
fy
( xy )xl
3F 2h
(1
弹性力学与有限元法1ppt课件

➢ 稳态分析 忽略时间效应。
➢ 瞬态分析 确定以时间为函数的温度等。 可模拟相变(融化及凝固)。
熨斗的瞬态热分析
28
本课程涉及到的高等数学及线性代数知识
1、泰勒级数
如果函数 f(x) 在点x0的某邻域内具有各阶导数 f ' (x), f '' (x),L , f (n) (x),L ,则可以将 f(x) 按照 泰勒级数展开为
应力种类
一次局部薄膜应 力
薄膜加弯曲应力
应力水平/MPa 限制值/MPa
41.12
167×1.5=250.5
73.81
167×3.0=511
评定结果 通过 通过
路径2
一次局部薄膜应 力
薄膜加弯曲应力
48.43 163.5
167×1.5=250.5 167×3.0=511
通过 通过
路径3
一次局部薄膜应 力
个坐标轴上的投影u、v、w来表示。以沿坐
标轴正方向的为正,沿坐标轴负方向的为负。
B
y
40
第一章 绪论
弹性力学的基本方法
从取微元体入手,综合考虑静力(或运动)、几 何、物理三方面条件,得出其基本微分方程,再进行求 解,最后利用边界条件确定解中的常数。
按照方程中保留的未知量,求解方法可分为 应力法(以应力为未知量) 位移法(以位移为未知量) 混合法(同时以应力和位移为未知量)
zy x
b
xxyz zx
yz
y yx
B
o
A PA dx, PBz dy, PC dz y
x
同样,可以列出另两个力矩平衡方程。得出
yz zy , zx xz , xy yx
38
第一章 绪论
➢ 瞬态分析 确定以时间为函数的温度等。 可模拟相变(融化及凝固)。
熨斗的瞬态热分析
28
本课程涉及到的高等数学及线性代数知识
1、泰勒级数
如果函数 f(x) 在点x0的某邻域内具有各阶导数 f ' (x), f '' (x),L , f (n) (x),L ,则可以将 f(x) 按照 泰勒级数展开为
应力种类
一次局部薄膜应 力
薄膜加弯曲应力
应力水平/MPa 限制值/MPa
41.12
167×1.5=250.5
73.81
167×3.0=511
评定结果 通过 通过
路径2
一次局部薄膜应 力
薄膜加弯曲应力
48.43 163.5
167×1.5=250.5 167×3.0=511
通过 通过
路径3
一次局部薄膜应 力
个坐标轴上的投影u、v、w来表示。以沿坐
标轴正方向的为正,沿坐标轴负方向的为负。
B
y
40
第一章 绪论
弹性力学的基本方法
从取微元体入手,综合考虑静力(或运动)、几 何、物理三方面条件,得出其基本微分方程,再进行求 解,最后利用边界条件确定解中的常数。
按照方程中保留的未知量,求解方法可分为 应力法(以应力为未知量) 位移法(以位移为未知量) 混合法(同时以应力和位移为未知量)
zy x
b
xxyz zx
yz
y yx
B
o
A PA dx, PBz dy, PC dz y
x
同样,可以列出另两个力矩平衡方程。得出
yz zy , zx xz , xy yx
38
第一章 绪论