简述多旋翼无人机的结构组成
多旋翼无人机系统组成4

4. 螺旋桨
靠桨叶在空气中旋转将发动机转动功率转化为推进力或升力的装置,简称螺旋桨。
它由多个桨叶和中央的桨毂组成,桨叶好像一扭转的细长机翼安装在桨毂上,发动机轴与桨毂相连接并带动它旋转。
直升机旋翼和尾桨也是一种螺旋桨。
螺旋桨旋转时,桨叶不断把大量空气向后(向下)推去,在桨叶上产生一向前(向上)的力,即推进力。
一般情况下,螺旋桨除旋转外还有前进速度。
如截取一小段桨叶来看,恰像一小段机翼。
桨叶上的气动力在前进方向的分力构成拉力。
在旋转面内的分量形成阻止螺旋桨旋转的力矩,由发动机的力矩来平衡。
对于固定翼来说主要提供的是推力,对于多轴来说提供是的升力。
在不超负载的情况下,飞机可以更换很多不同的桨,同样可以飞起来,但是飞行效果和续航时间,却是大相径庭。
螺旋桨选得适合,飞行更稳,航拍效果和续航时间都兼得,选得不好可能效果就相反了。
图2.10 桨叶的剖面和飞机机翼的升力原理
图2.11 两叶浆和三叶浆
螺旋桨有2、3或4个桨叶,一般桨叶数目越多吸收功率越大。
多旋翼飞行器的螺旋桨一般使用两叶浆,同电机类似,螺旋桨也有如8045, 9047等4位数字标示,前面2位代表螺旋桨的直径,也就是长度,单位是英寸。
但是要注意,9047。
多旋翼无人机的结构
螺旋桨的选择
KV值是每1V的电压下电机每分钟空转的转速。 例如KV800,在1V的电压下空转转速是800转每 分钟。那么10V的电压下是8000转每分钟的空转 转速。
KV值越小,同等电压下转速越低,扭力越大, 可带更大的桨。
KV值越大,同等电压下转速越高,扭力越小, 只能带小桨。
相对的说池的电压是用伏特(V)来表示的。标称电压只是厂家按照国 家标准标示的电压,实际上使用时电池的电压是不断变化的。如镍氢 电池的标称电压是1.2V,充电后电压可达1.5V,放电后的保护电压为 1.1V;锂聚合物电池的标称电压是3.7V,充电后电压可达4.2V,放电 后的保护电压为3.6V。在实际使用过程中,电池的电压会产生压降, 这是和电池所带动的负载有关的,也就是说电池所带的负载越大,电 流越大,电池的电压就越小,在去掉负载后电池的电压还可恢复到一 定值。
锂聚合物电池的参数说明 电池重要参数有C数、P数、S数等,具体含义如下:
C数是指电池能正常放电的倍数。可以简单理解为放电能力。C数乘以容量,就是电池 最大放电电流。
S数是指串联锂离子电池电芯的片数,S数越大,电池的电压越大。
P数是指并联锂离子电池电芯的片数,P数越大,电池的电流越大。
常见的航模电池有3.7V、7.4V、11.1V、14.8V、18.5V、22.2V锂电池。不难发现,这 些常用电池电压都是3.7的整数倍,这是为什么呢?上面提到过锂电池的制作工艺一般 采用叠片软包装,一般来说,一片就是3.7V,专业叫1S电池,因此两片就是7.4V,2S 电池。以此类推,3S电池是11.1V,后面不再累赘。
A2多旋翼飞控
NAZA多旋翼飞控
ACE ONE多旋翼飞控
NAZA-H多旋翼飞控
课程结束
多旋翼的系统组成认识
多旋翼的系统组成认识⽬前市⾯上的飞⼿很⼤⼀部分也是只会飞不会修的的尴尬场⾯,基本的原理很多飞⼿还不知道,本⽂给各位客官⽼爷介绍⼀下四轴多旋翼⽆⼈机的基本组成。
如果⽂中有错误欢迎各位客官⽼爷批评指出。
好啦,话不多说开始今天的课程吧!基本概念多旋翼飞⾏器也称多轴飞⾏器,是⼀种具有三个及以上旋翼轴的特殊直升机,其每个轴上的电机转动,带动旋翼产⽣升⼒。
⽬前市⾯上主流的布局⽅式:四轴四旋翼X型布局四轴四旋翼⼗型布局四轴⼋旋翼X型布局(上下两个电机桨叶)四轴四旋翼H型布局四轴⽆⼈机基本组成多旋翼动⼒系统的组成为:桨、机、调、池桨:桨径,桨距、CCW、正反桨、反扭螺旋桨是安装在电机上的,为飞⾏器提供升⼒的装置,电机仅仅是将电能转换为机械能,⽽螺旋桨才是提供升⼒的部件,螺旋桨产⽣推⼒⾮常类似机翼产⽣升⼒的⽅式。
产⽣的升⼒⼤⼩依赖于桨叶的平⾯形状、桨叶的迎⾓和电机的转速。
⼀般装在多旋翼上的都是定距桨,只有改变转速才能提供升⼒。
桨径和桨距:螺旋桨主要指标有桨径和桨距(也叫螺距、总距),使⽤4位数字表达,如1655。
前两位数字代表的是桨叶的直径16英⼨(1英⼨=254mm)后⾯两位是桨的桨距。
也有写成16*5的也有写成1655的。
1655的桨叶⽐1340的桨看起来⼤也⽐后者陡。
桨距是指桨叶每旋转⼀周都会向前,这个距离就称为桨距,⼀般来讲实际桨距都⼩于理论桨距。
正反桨:多旋翼为了抵消单个螺旋桨的反扭⼒,各个桨叶的旋转⽅向是不⼀样的,所以他需要正反桨叶,正反桨叶的⽓流都是向下吹的,正桨⽤CCW表⽰,反桨是⽤CW表⽰的。
机:规格、内外转⼦、⽆刷、三相⽆⼈机的电机⽬前有两种类型:有刷和⽆刷。
现在市场上多数流⾏⽤⽆刷。
⼀是因为动⼒⾜,⼆是因为寿命长,三是因为效率⾼,四是因为也并不贵。
⽆刷是⽬前的主流,所以这⾥重点讲讲⽆刷电机。
⽆刷电机有三根线。
没有像有刷那样的⼀对电刷,故称⽆刷。
有刷电机有⼀对电刷,使⽤到⼀定次数,电刷就被磨损殆尽,于是得更换电刷。
无人机快递技术—多旋翼无人机

A2多旋翼飞控
NAZA多旋翼飞控
ACE ONE多旋翼飞控 NAZA-H多旋翼飞控
多旋翼无人机
三、多旋翼飞行原理
• 多旋翼飞行器是通过调节多个电机转速来改变螺旋桨转速,实 现升力的变化,进而达到飞行姿态控制的目的。
智能锂电池
多旋翼无人机 二、多旋翼飞行器的构造——遥控系统
遥控系统由遥控器和接收机组成,是整个 飞行系统的无线控制终端。
遥控器
接收机
多旋翼无人机
二、多旋翼飞行器的构造——飞行控制系统
• 飞行控制系统集成了高精度的感应器元件,主要由陀螺仪(飞 行姿态感知),加速计,角速度计,气压计,GPS及指南针模 块(可选配),以及控制电路等部件组成。通过高效的控制算 法内核,能够精准地感应并计算出飞行器的飞行姿态等数据, 再通过主控制单元实现精准定位悬停和自主平稳飞行。
多旋翼无人机
三、多旋翼飞行原理
俯仰运动,即前后控制
在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的 转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩 及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的 升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方 向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便 绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
多旋翼无人机
目录
CONTENTS
1 多旋翼概述及分类 2 多旋翼飞行器的构造 3 多旋翼飞行原理
多旋翼无人机
一、多旋翼概述及分类
• 多旋翼飞行器也称为多轴飞行器,是直升机的一种,它通常有3个 以上的旋翼。飞行器的机动性通过改变不同旋翼的扭力和转速来实 现。相比传统的单水平旋翼直升机,它构造精简,易于维护,操作 简便,稳定性高且携带方便。
多旋翼无人机系统的组成
池负责供电,机架将所有的零件固定在一起。 下面以大疆筋斗云DJI S1000+为例进行介绍。
1.机身和起落架 图2.3 DJI S1000+飞行器
机身由中心板、机臂(包含电机、电调和螺旋桨)、智能起 落架等组成。
图2.4 DJI S1000+飞行器中心板
• 专业多旋翼航拍飞行器的机身和起落架多 用强度高而重量轻的碳纤维复合材料制作。
• 无刷电机的一个重要参数是KV值,它是指电机 输入电压每提高1伏特,电机空载转速提高的 量。例如大疆的DJI 4114电机的KV值是 400prm/V,即说明电机空载情况下加1伏特电 压转速为每分钟400转,2伏特电压每分钟800 转,依此类推。同型号电机(比如都是4114)低 KV值比高KV值提供的扭力大,类似于汽车一挡 的速度虽然慢,但是爬坡更容易。但是低KV值 需要配大螺旋桨,如果搭配不合适会造成严重 的反扭现象。另外,像电机重量、最大拉力、 最大起飞重量等也是无刷电机重要参数。
• 外转子无刷电机的命名原则,各个厂家有所不同,有以电机定子的直 径和高度来命名,也有以电机的直径和高度来命名。多旋翼无人机所 用的电机大多都是以电机定子的直径与高度来命名。例如大疆的DJI 4114电机,指的是该电机定子直径41MM,定子高度14MM。
图2.7 DJI 4114电机和桨夹
图2.8 无刷电机定子和转子
图2.10 桨叶的剖面和飞机机翼的升 力原理
图2.11 两叶浆和三叶浆
• 螺旋桨有2、3或4个桨叶,一般桨叶数目越多吸收功率越大。多 旋翼飞行器的螺旋桨一般使用两叶浆,同电机类似,螺旋桨也 有如8045, 9047等4位数字标示,前面2位代表螺旋桨的直径,也 就是长度,单位是英寸。但是要注意,9047是直径9英寸螺旋浆, 而1045是直径10英寸螺旋浆。后面两位数是指几何螺距,螺距 原指螺纹上相邻两牙对应点之间的轴向距离,可以理解为螺丝 转动一圈前进的距离。而螺旋桨的螺距是螺旋桨在固体介质内 无摩擦旋转一周所前进的距离。简单来说可以理解为螺旋桨桨 叶的“倾斜度”,螺距标称越大倾斜度越大。螺旋桨长度和螺 距越大,所需要的电机或发动机级别就越大。螺旋桨的长度越 大,某种程度上能够保证飞机俯仰稳定性越高,螺距越大飞行 速度越快。四轴飞行器为了抵消螺旋桨的自旋,相邻的螺旋桨 旋转旋转的叫正桨(CW)、逆时针旋转的是反桨(CCW)。 安装的时候一定记得无论正反桨有字的一面是向上的。
多旋翼无人机基础知识二
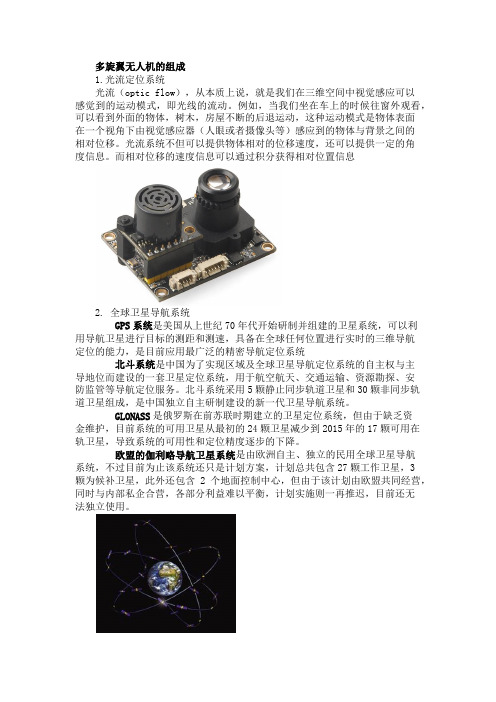
多旋翼无人机的组成1.光流定位系统光流(optic flow),从本质上说,就是我们在三维空间中视觉感应可以感觉到的运动模式,即光线的流动。
例如,当我们坐在车上的时候往窗外观看,可以看到外面的物体,树木,房屋不断的后退运动,这种运动模式是物体表面在一个视角下由视觉感应器(人眼或者摄像头等)感应到的物体与背景之间的相对位移。
光流系统不但可以提供物体相对的位移速度,还可以提供一定的角度信息。
而相对位移的速度信息可以通过积分获得相对位置信息2. 全球卫星导航系统GPS系统是美国从上世纪70年代开始研制并组建的卫星系统,可以利用导航卫星进行目标的测距和测速,具备在全球任何位置进行实时的三维导航定位的能力,是目前应用最广泛的精密导航定位系统北斗系统是中国为了实现区域及全球卫星导航定位系统的自主权与主导地位而建设的一套卫星定位系统,用于航空航天、交通运输、资源勘探、安防监管等导航定位服务。
北斗系统采用5颗静止同步轨道卫星和30颗非同步轨道卫星组成,是中国独立自主研制建设的新一代卫星导航系统。
GLONASS是俄罗斯在前苏联时期建立的卫星定位系统,但由于缺乏资金维护,目前系统的可用卫星从最初的24颗卫星减少到2015年的17颗可用在轨卫星,导致系统的可用性和定位精度逐步的下降。
欧盟的伽利略导航卫星系统是由欧洲自主、独立的民用全球卫星导航系统,不过目前为止该系统还只是计划方案,计划总共包含27颗工作卫星,3颗为候补卫星,此外还包含2个地面控制中心,但由于该计划由欧盟共同经营,同时与内部私企合营,各部分利益难以平衡,计划实施则一再推迟,目前还无法独立使用。
3.高度计由于全球定位系统GNSS的缺陷,它的高度信息极为不准确,通常偏差达几十米甚至更大,无人机系统的高度测量需要额外的设备来辅助测量。
常用的高度传感器主要包含超声波传感器和气压高度传感器,此外还有激光高度计和微波雷达高度计等。
气压高度计的原理是地球上测量的大气压力在一定方位内是与相对海拔高度呈现对应关系的。
多旋翼无人机动力系统各器件的功能

多旋翼无人机动力系统各器件的功能多旋翼无人机动力系统是无人机的核心部分,由多个器件组成,各具不同功能。
下面将分别介绍多旋翼无人机动力系统中各个器件的功能。
1. 电机(Motor)电机是多旋翼无人机动力系统的关键组件之一,主要负责提供动力。
电机通过转动螺旋桨产生的推力,使无人机能够在空中飞行。
根据无人机的大小和载重要求,电机的功率和转速可以有所不同。
2. 螺旋桨(Propeller)螺旋桨是将电机的动力转化为推力的装置。
它通过旋转产生气流,从而推动无人机向前飞行或保持平衡。
螺旋桨的形状和材料也会影响无人机的性能和稳定性。
3. 电调(Electronic Speed Controller,ESC)电调是无人机动力系统中的控制装置,用于调节电机的转速和功率。
通过接收飞控系统发送的指令,电调可以控制电机的转速,从而控制无人机的飞行姿态和速度。
4. 电池(Battery)电池是无人机动力系统的能量来源,提供给电机和其他电子设备所需的电能。
电池的容量和电压决定了无人机的续航能力和飞行时间。
不同类型的电池(如锂电池、聚合物电池等)具有不同的特性和适用场景。
5. 电源管理系统(Power Distribution Board,PDB)电源管理系统用于管理和分配电能,将电池的电能供给给各个部件。
它通常包括电源输入接口、分配电路和电源输出接口等。
通过电源管理系统,可以确保各个部件能够正常工作,并提供电流和电压保护功能。
6. 电源滤波器(Power Filter)电源滤波器用于过滤电源中的干扰和噪音,保证无人机系统能够正常运行。
它可以减少电源波动对其他电子设备的影响,并提高系统的稳定性和可靠性。
7. 传感器(Sensors)传感器在无人机动力系统中起到感知和监测的作用。
常见的传感器包括加速度计、陀螺仪、罗盘等。
它们可以测量无人机的姿态、速度、方向等参数,并将这些信息传输给飞控系统,从而实现无人机的自动控制和稳定飞行。
无人机结构—无人机的基本结构

二、无人机的基本结构
3.多旋翼无人机的基本结构
2.动力装置 1)电池 主要为无人机提供能量,无人机多采用锂聚合物电池。 2)电调 (Electronic Speed Controller,ESC),全称电子调速器。它的主要功能是将飞控 板的控制信号进行功率放大,并向各开关管送去能使其饱和导通和可靠关断的驱动信号,以控制电动 机的转速;将电源电压转换为5V,为飞控板、遥控接收机供电;将直流电源转换为三相电源,为无 刷电机供电。 3)电机 带动浆叶旋转使多旋翼无人机产生升力,通过对各电机转速的控制,可使多旋翼无人 机完成飞行活动。 4)螺旋桨 旋转产生拉力或推力使无人机完成飞行活动。
二、无人机的基本结构
2)机架布局 常见的机架布局有X型、I型、 V型、Y型和IY型等
3.多旋翼无人机的基本结构
二、无人机的基本结构
3)机架轴距 轴距是机架最重要的数据指标,它 是指对角线两个电机或者桨叶中心的距 离,单位为毫米(mm) 四轴250:表示对角线电机中心的 距离为250毫米
3.多旋翼无人机的基本结构 四轴250
1.固定翼无人机的基本结构
4.起落装置 ♦功能:支撑无人机在地面上的活动, 包括起飞和着陆滑跑、滑行、停放。 ♦组成 支柱:起支撑作用并作为机轮的安装 基础。 减震器:吸收着陆和滑跑冲击能量 机轮:与地面接触支持无人机的重量, 减少无人机地面运动的阻力,可以吸收一 部分撞击动能有一定的减震作用 收放机构:用于收放起落架以及固定 支柱,飞行时可减少阻力
1.固定翼无人机的基本结构
1-接头;2-加强肋;3-翼梁;4-前墙; 5-蒙皮;6-后墙;7-翼肋;8-桁条
二、无人机的基本结构
2.机身 ♦功能 装载、安装基础。 ♦组成 蒙皮:与机翼蒙皮作用相似; 桁条:与机翼桁条作用相似; 桁梁:作用与翼梁相似; 隔框:作用与翼肋相似。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简述多旋翼无人机的结构组成
多旋翼无人机通常由以下几部分组成:飞行控制器、电机、螺旋桨、舵机、遥控器以及机身框架。
飞行控制器是多旋翼无人机的核心部件,主要作用是接收来自遥控器的信号,并根据信号控制电机转速和舵机角度等,从而实现飞行控制。
电机则是提供飞行动力的部件,多旋翼无人机通常配备四个或六个电机,同时每个电机上都有一对相对应的螺旋桨,螺旋桨通过电机的转动产生推力,从而使无人机飞行。
舵机则是多旋翼无人机中掌管机身姿态调整的重要部件,不同的舵机可以掌管不同的部位,包括俯仰、横滚和偏航,通过不同的舵机控制机身不同部位的角度变化,从而实现无人机姿态调整。
至于遥控器,它是传输飞行控制信号的重要工具,操作者可以通过遥控器实时控制无人机的飞行高度、飞行方向等。
最后,机身框架作为无人机的主体框架,连接了所有零部件,保证无人机内部的稳定性和整体坚固性。