起重机控制原理
关于起重机的原理有哪些
关于起重机的原理有哪些起重机是一种用于吊装和搬运重物的机械设备。
它通过利用力学原理和电动机等动力装置来实现重物的抬升、挪动和放下等操作。
起重机的原理涉及到结构设计、力学运动、电气控制等多个方面。
起重机的基本原理是利用杠杆原理。
它是由一根或多根杠杆通过铰链连接组成的。
起重机的主杆是一个固定在地面上的大臂,通过支点与主臂相连的臂座,构成一个杠杆。
运用杠杆原理可以实现将重物自动平衡,并减小力的作用范围,提高运动效率。
起重机的另一个原理是运用滑轮组。
滑轮组是起重机的核心装置,它通过改变绳索的拉力和方向,实现起重机的升降、横移和回转等运动。
滑轮组一般由多个滑轮组成,有的起重机还可通过添加滑轮组实现更大的工作半径和承载力。
在起重机的操作中,还运用了液压原理。
液压系统常见于液压起重机,通过使用液体(通常是油)来传递力量和控制运动。
液压系统由一个或多个液压缸、液压泵、液压阀等组成。
利用液压原理,可以实现起重机的平稳升降、准确的定位和平衡控制。
此外,还有电气原理在起重机中的应用。
起重机中的电气控制系统通过控制台上的按钮、开关等设备,通过电气信号来控制起重机的运动。
电气控制系统还可以通过传感器感知重物位置、重量和起重机各部件的状态等信息,从而实现智能化控制。
在起重机的设计中,还要考虑到材料力学原理。
起重机的结构要能承受起重物的重量和引起的应力。
设计中还需兼顾静力学与动力学,并根据工作环境和使用要求选用合适的材料和结构形式。
综上所述,起重机的原理涵盖了杠杆原理、滑轮组原理、液压原理、电气原理以及材料力学原理等多个方面。
这些原理的应用使得起重机能够实现高效、准确、安全的重物吊装和搬运。
1液控履带起重机电气控制原理
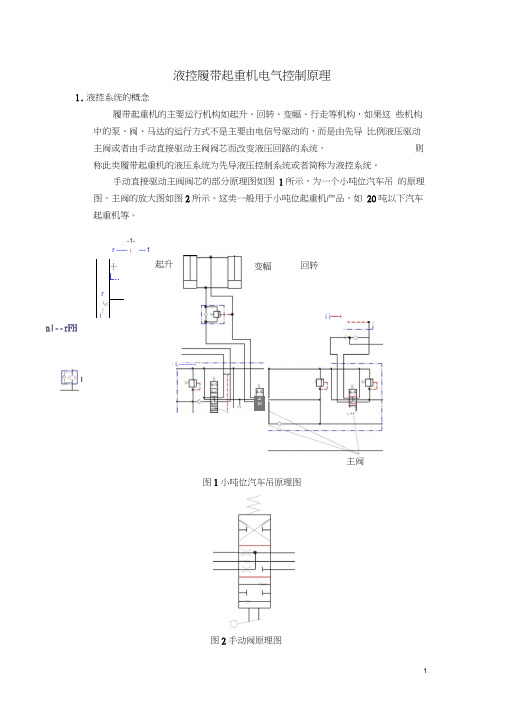
液控履带起重机电气控制原理1. 液控系统的概念履带起重机的主要运行机构如起升、回转、变幅、行走等机构,如果这 些机构中的泵、阀、马达的运行方式不是主要由电信号驱动的,而是由先导 比例液压驱动主阀或者由手动直接驱动主阀阀芯而改变液压回路的系统,则称此类履带起重机的液压系统为先导液压控制系统或者简称为液控系统。
手动直接驱动主阀阀芯的部分原理图如图 1所示,为一个小吨位汽车吊 的原理图。
主阀的放大图如图2所示。
这类一般用于小吨位起重机产品,如 20吨以下汽车起重机等。
-1-r ----- ; --- 1图1小吨位汽车吊原理图n|--rFH十L..r\<1|_\ I ---------回转I起升变幅2sii i —+主阀图2手动阀原理图先导比例液压控制的典型原理图如图 3所示。
一般用于小吨位汽车吊和履带 吊,如50-100吨左右。
它的主要特点之一就是主机构的油路的改变采用先导油 压进行控制,因此,手柄的驱动力可以很小。
电控系统指的是在对液压系统的控制过程中,泵、阀或马达等机构采用的是 电信号控制。
泵可以是电比例变量泵,电信号的大小直接控制泵排量的大小; 阀 可以是开关阀也可以是比例阀,马达也一样。
图4是一种电控开关主阀的原理图, 图5是一种电比例控制的马达原理图。
图5电控开关主阀的原理图图3先导比例液压控制原理图y 一 _____电制动阀图6电比例控制的马达原理图2. 液控系统的控制框图由于相关的电气控制点比较少,控制逻辑也比较简单,因此,电气控制的主 要方面有力限器的控制和相关信息的显示说明等。
对液控的履带起重机进行分析,可以将电气系统分成如下几部分: 1) 人机界面:包括各类的显示灯、组合仪表、视频系统等; 2) 安全限制装置:包括力限器系统、限位开关、传感器等; 3) 工作操作装置:包括手柄、脚踏板、遥控器等; 4) 执行装置:包括各类开关、继电器、灯具等电器元件。
整车控制系统的框图如图7所示。
起重机工作速度的控制方案与原理
起重机工作速度的控制方案与原理起重机是一种用于吊装和运输重物的机械设备,广泛应用于建筑、船舶、工厂等领域。
在起重机的运行过程中,控制机构对工作速度的控制起着至关重要的作用。
本文将介绍起重机工作速度的控制方案以及其原理。
一、起重机工作速度的控制方案1. 液压控制方案液压控制是起重机控制工作速度的一种常见方案。
起重机通过控制液压机构的工作状态,实现速度的调节和控制。
起重机液压系统通常包括油泵、阀组以及液压缸等组件。
控制液压油的流量和压力可以精确地控制起重机的工作速度。
2. 电气控制方案电气控制是另一种常用的起重机工作速度控制方案。
起重机通过控制电机的转速和绕组的电流来实现速度的调节和控制。
在电气控制系统中,通常包括变频器、PLC控制器以及电气元件等组件。
利用电气控制可以实现起重机的精确控制和调速。
3. 机械传动方案机械传动也是一种常见的起重机工作速度控制方案。
通过改变传动装置(如齿轮、皮带等)的传动比例,可以实现起重机工作速度的控制。
机械传动方案通常结构简单、可靠性高,但调速范围相对较小。
二、起重机工作速度控制原理1. 液压控制原理液压控制的基本原理是利用液压系统中的液体传递压力和流量,控制液压缸的运动速度。
液压控制系统通常由液压泵、阀门、液压缸等组成。
通过调节液压泵的排量、阀门的开启度和液压缸的工作面积等参数,可以实现起重机工作速度的控制。
2. 电气控制原理电气控制的基本原理是利用电气元件的特性,通过控制电机的转速和电流来实现起重机工作速度的调节。
电气控制系统通常由电机、变频器、PLC控制器等组成。
通过调节电机的供电电压、频率和电流等参数,可以实现起重机的准确控制。
3. 机械传动原理机械传动的基本原理是利用机械装置的传动比例,改变输入和输出的速度比,从而实现起重机工作速度的控制。
机械传动通常由齿轮、皮带、链条等组成。
通过改变齿轮副的传动比例、调整皮带的拉紧程度等方式,可以实现起重机的速度调节。
三、起重机工作速度的优化控制为了进一步提高起重机工作速度的控制精度和效果,可以采用以下措施:1. 采用闭环控制闭环控制是一种通过反馈信号来控制输出的控制方式。
起重机的变频控制原理
起重机的变频控制原理
起重机的变频控制原理:
起重机的变频控制是指通过变频器控制电动机的频率和转速来实现对起重机运行速度的精确调节。
其主要原理如下:
1. 变频器工作原理:变频器通过电子器件将电源提供的固定频率交流电转换为可调频率的交流电,供给电动机使用。
变频器可以根据负载的情况,实时调整输出频率和电压,以使电动机转速和运行状态恰好满足需求。
2. 变频器控制电动机频率:起重机的起升、行走和变幅等动作,需要根据实际需求进行调节。
变频器可以通过接收来自操作台或自动控制系统的信号,调整输出频率,从而控制电动机的转速,实现起重机各个动作的精确控制。
3. 矢量控制技术:变频器通常采用矢量控制技术来实现对电动机的控制,这种技术可以准确地测量电动机的电流、电压和转速等参数,并通过内置的数学模型和算法进行计算和调整。
矢量控制技术可提供更加精确的转速控制和力矩输出,使起重机运行更加平稳、高效。
4. 速度闭环控制:为了进一步提高起重机的运行精度和稳定性,变频器通常还配备了速度闭环控制功能。
即通过安装编码器等反馈装置,实时监测电动机的转速,并与预设的速度进行比较,从而进行误差修正和调整。
这种闭环控制能够精确地保证起重机运行的稳定性和准确性。
总之,起重机的变频控制通过变频器实现对电动机的频率和转速进行精确调节,采用矢量控制技术和速度闭环控制等方法,可以实现对起重机各个动作的精确控制,提高运行稳定性和效率。
吊机 原理

吊机原理
吊机是一种起重设备,通过悬挂或吊装运输重物。
吊机的原理是基于力学和物理学的原理,主要包括以下几个方面:
1. 提升原理:吊机通过电动机、液压系统或其他动力源提供动力,并利用钢丝绳、链条或液压缸等提升装置将钩具或夹具与起重物连接起来。
通过控制提升装置的运动,可以实现起重物的升降。
2. 平衡原理:吊机在起重物升降的过程中,需要保持平衡,避免翻倒或倾覆。
为了实现平衡,吊机通常会设置配重或在整机结构上采取平衡措施,以确保重心稳定,并减小倾覆的风险。
3. 运动控制原理:吊机的工作状态可以通过控制系统进行调节。
控制系统可以通过操作杆、按钮、遥控器等方式,控制各种机械装置的运动,包括提升高度、移动位置、旋转角度等。
通过合理的控制,可以实现吊机的精确定位和高效操作。
4. 结构原理:吊机的结构通常包括起重机架、起重装置、运行机构等部分。
起重机架是吊机的主要承载结构,起重装置包括起重臂、起重臂机构、钩具和夹具等部件。
运行机构包括行走机构、回转机构等,用于实现吊机的移动和旋转。
总的来说,吊机的原理是利用动力系统提供动力,通过悬挂装置实现起重物的提升,通过平衡装置确保吊机稳定,通过控制系统实现运动控制,同时依靠结构设计来支撑和安全运行。
不
同类型的吊机可能在原理上有所不同,但都基于这些基本的原理。
汽车起重机工作原理

汽车起重机工作原理汽车起重机是一种用于举起和搬运重物的设备,其工作原理主要涉及机械原理和液压原理。
1. 机械原理汽车起重机的机械原理主要包括杠杆原理和滑轮原理。
杠杆原理是指当一个杠杆在一个支点上受到力的作用时,可以通过改变力臂和力的大小来达到平衡。
在汽车起重机中,主臂和副臂就是通过杠杆原理实现力的平衡和转移。
滑轮原理是指通过改变传动装置的滑轮的数量和布局,可以改变力的方向和大小。
在汽车起重机中,通过改变滑轮的组合方式,可以改变起重机的举升速度和力的大小。
2. 液压原理汽车起重机的液压原理主要包括液压传动和液压控制。
液压传动是指通过液体的压力传递力和能量的一种方式。
在汽车起重机中,液压传动主要通过液压系统中的液压泵、液压缸和液压管路来实现。
液压泵通过转动产生液压油的压力,将液压油送入液压缸中,从而推动活塞产生力。
液压控制是指通过控制液压系统中的阀门来实现对液压油流动的控制。
在汽车起重机中,液压控制主要通过操纵杆或按钮来控制液压系统中的液压阀门的开关,从而实现对起重机的控制。
综合以上两种原理,汽车起重机的工作原理可以简单概括为:通过机械原理和液压原理的相互配合,将发动机的动力转化为液压系统的动力,通过液压系统的控制,实现起重机的举升、旋转和伸缩等动作。
具体来说,当驾驶员通过操纵杆或按钮操控起重机时,液压泵会开始工作,将液压油送入液压缸中。
液压缸中的活塞受到液压油的推动,产生力,从而带动起重机的举升、旋转和伸缩等动作。
通过改变液压系统中液压阀门的开关,可以控制液压油的流动方向和大小,从而实现对起重机动作的精确控制。
汽车起重机的工作原理主要涉及机械原理和液压原理的应用。
通过机械原理实现力的平衡和转移,通过液压原理实现力的传递和控制。
这种工作原理使得汽车起重机能够高效、精确地完成各种起重作业任务,广泛应用于建筑工地、港口码头等场合。
起重机的工作原理

起重机的工作原理
起重机是一种能够快速、高效地起重和搬运重物的机械设备。
它的工作原理主要是通过应用物理学中的杠杆原理和机械传动原理实现的。
起重机通常由起升机构、变幅机构、行驶机构和控制系统等几个主要部分组成。
起升机构是起重机的核心部分,它负责提升和降低重物。
起升机构中主要包括电动机、液压系统、齿轮和钢丝绳等。
当起重机需要提升重物时,电动机启动并通过液压系统或电动机带动齿轮旋转,使钢丝绳缠绕在齿轮上。
随着齿轮的旋转,钢丝绳逐渐上升,从而提起重物。
当需要降低重物时,电动机反向运转,使钢丝绳缓慢放松,从而实现重物的下降。
起升机构的设计使得起重机能够承受和操控各种重量级的物体。
变幅机构用来控制起重机的幅度,即工作半径。
它常常采用伸缩臂或变幅桁架等结构,通过液压系统的收缩和伸展来调整臂的长度或桁架的展开程度。
这样可以使得起重机在不同的工作场景中灵活自如地完成起升和搬运任务。
行驶机构用来实现起重机在工作场地的移动。
它通常由驱动装置、轮胎或履带等构成。
驱动装置可以是内燃机或电动机,通过控制驱动轮的旋转实现起重机的前进、后退以及转弯等动作。
最后,起重机还需要配备相应的控制系统,用来对起升、变幅和行驶等操作进行精密控制。
控制系统可以采用遥控或操作平
台来实现人机交互,操作人员可以根据实际需要调整起重机的运行状态和任务。
总的来说,起重机的工作原理是基于杠杆原理和机械传动原理,通过电动机、液压系统、齿轮和钢丝绳等组件的相互配合,实现对重物的起升、降低、移动和调整等功能。
起重机的高效运行使其在工业、建筑和物流等领域中得到广泛应用。
起重电机工作原理

起重电机工作原理
起重电机工作原理是利用电能转换为机械能,通过电动机驱动起重机构实现吊物的升降运动。
起重电机一般由电动机、行走机构和制动装置组成。
电动机是起重电机的核心部件,根据功率大小可分为直流电动机和交流电动机。
电动机的旋转动力通过传动装置传递到筒体上的绳轮上,使其旋转。
其中,绳轮上缠绕有悬挂物体的钢丝绳,绳轮旋转一周,悬挂物体的高度就改变一个绳轮的半径。
行走机构通常由行走电动机、减速器、制动器、轮组和轨道等组成。
行走电动机驱动轮组通过减速器带动起重电机在轨道上前进或后退,起到控制起重机移动的目的。
制动装置主要是为了控制起重机的停止和运动过程中的安全。
制动装置通常采用电磁制动器或摩擦制动器,使起重机能够稳定停止或保持在需要的位置。
起重电机的工作原理是,在电动机的驱动下,悬挂物体通过绳轮进行升降运动。
电动机可以根据控制信号的输入实现起重机的精细控制,使其能够适应不同的升降、移动速度要求,实现起重操作的准确性和安全性。
总之,起重电机通过电能转换为机械能,通过电动机驱动起重机构实现对悬挂物体的升降运动,从而实现起重操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
起重机控制原理
起重机是一种用来吊运和移动重物的机械设备,其控制原理是通过各种传感器和控制器来实现起重机的运行和操作。
起重机的控制原理主要包括机械结构、电气控制、液压控制和计算机控制等方面。
首先,起重机的机械结构是其控制原理的基础。
起重机包括吊钩、起重机构、起升机构和行走机构等重要的部件,这些部件通过机械传动来实现吊运和移动重物的功能。
其中,吊钩通过起重机构和起升机构来实现吊运和升降重物,行走机构则可以使起重机在作业区域内自由移动。
这些机械结构的设计和布置对起重机的控制原理起着至关重要的作用,合理的机械结构可以使起重机运行更加稳定和可靠。
其次,起重机的电气控制是起重机控制原理中的重要组成部分。
电气控制系统包括主要的控制器、传感器、执行元件和电气设备等。
控制器通过接收来自传感器的信号来实现对起重机的操作和控制,传感器可以感知起重机的运行状态和环境参数并将其转化为电信号,执行元件则可以根据控制器的指令来对起重机进行各种动作和操作。
电气设备则提供了控制系统所需的电能和电路支持。
通过电气控制系统,可以实现对起重机的精确控制和灵活操作,使其能够适应各种复杂的作业环境和需求。
另外,起重机的液压控制也是其控制原理中的一个重要方面。
液压控制系统通过液压传动来实现对起重机的运行和操作。
液压控制系统包括液压泵、液压阀、液
压缸和液压管路等组成部分,液压泵负责为系统提供液压源,液压阀控制液压系统的流动方向和流量,液压缸则负责驱动起重机的各个部件进行运动。
液压控制系统具有密封性好、传动平稳和负载能力高的优点,可以使起重机在吊运重物时具有较好的稳定性和精度。
最后,随着计算机技术的不断发展,起重机的计算机控制也逐渐成为了起重机控制原理的新趋势。
计算机控制系统可以通过对起重机的各种运行参数进行实时监测和分析,实现对起重机的智能化控制和优化运行。
计算机控制系统可以集成多种传感器和控制器,实现对起重机的全方位监控和管理。
同时,计算机控制系统可以通过先进的算法和模型对起重机的运行状态进行预测和优化调节,使起重机具有更高的运行效率和安全性。
综上所述,起重机的控制原理涵盖了机械结构、电气控制、液压控制和计算机控制等多个方面,这些方面相互配合,共同实现起重机的运行和操作。
随着科学技术的不断进步,起重机的控制原理也在不断完善和创新,为人们的生产生活提供了更加便利和高效的解决方案。