连续介质力学基本理论物理量的不变性表示
3.连续介质力学
2 变形和运动
( X , t)
在初始域和当前 域 域之间的映射
初始构形 当前构形
X X iei X iei
i 1
n SD
材料点的位置矢量
x xi e i xi e i
i 1
n SD
ei 直角坐标系的单位基矢量,xi 位置矢量的分量。
2 变形和运动
运动描述
空间坐标
x Φ X , t 或 x i i X , t
t
2 t 2
, ,
y 2 t 21 at sin y 3 t 1 bt cos
t
2
(1)
t
2
求解变形梯度和Jacobian行列式为时间的函数, 当Jacobian行列式保持常数时求出a和b的值。
2 变形和运动
解:
三角形3节点线性位移单元的构形
x ξ , t x I t I x1 t 1 x2 t 2 x3 t 3 y ξ , t y I t I y1 t 1 y 2 t 2 y3 t 3
f x, t d
0
f ΦX, t , t Jd 0
或
fd
0
fJd 0
二维域
f x, y dxdy
0
f X , Y JdXdY
Jacobian行列式的材料时间导数给出为
DJ Jdiv v J vi J Dt xi
sin r x cos r y
空间坐标
v x R R T x xT xT Ω x xT xT
第四章 连续介质力学的基本定律
br 0 b 0
bz 0
在球面坐标系中,平衡方程可化为:
T rr r
1 T r r
1 T r
1
T r
r sin
1 r
2 T
1
rr
cot T r T T b r 0
f fb fc
其中
fb
V
bdV
tdS
fc
S
物体的动量为:
m
V
vdV
Dx Dt dV
V
V
adV
S
tdS
V
bdV
可将上式改写为:
S
n TdS
V
bdV
V
adV
利用高斯公式,得到:
即:
V
T dV
左边两项分别 表示连续介质 的动能和内能 的时间变化率
右边分别表示 接触力和体力 所做的功率
DK Dt
V
D : T dV
S
t v dS
V
b v dV
若令U表示内能,则能量方程也可简洁地写成:
DK Dt DU Dt DW Dt
即:
动能变化率+内能变化率=外力作用功率 表示接触力和 体力的功率
v y y
v z z
0
在柱面坐标系中,连续性方程为:
t
1 rv r r
【2019年整理】连续介质力学-第四章1
7
★Lagrange 坐标系中的连续方程
t 在Lagrange坐标系中,考察同一个流体微团,在时刻 1 和 t 时刻 2 的两个位置:
1.在 t1 时刻 , 流体的封闭面为A1,体积为Γ1
而在 t2 时刻,流体的封闭面为A2 , 体积为Γ2
在Lagrange描述中,采用变量是 a1a2 a3t 则在时刻 t1
利用输运公式可以在Euler描述的时空坐标系中
建立对有限域内的基本守恒律(积分型方程)以
及微元体内的基本守恒律(微分型方程).
15
Euler描述的基本守恒律微分型方程的推导:
DI Dt
D Dt
dV
V*
V*
(
t
V
)dV
*
V*
V dV
*
V*
(
t
V
V )dV
*
V*
[
t
(
V )]dV
3. 性质:
l质量体的边界面形状将随时间变化(可以发生
运动 、变形等)
l 边界面上无质量交换——热力学中的闭系统
l边界上可存在力的作用以及能量(热,动)的
交换;
2
(二)质量体(闭系统)上的守恒律描述—— 经典力学守恒律描述。
1.质量守恒: 原理:若不存在质量源(汇), 则质量体(闭系 统)内的总质量不随时间而变化(物质不灭定律
t
V
A
(n V )dA
FdV PdA
V
A
20
★微分型方程:
对于动量方程,关键是对表面力的面积分
项: PdA 的处理
A
考虑到表面力与应力张量的关系:
P
n
PdA
n
连续介质力学
矢量与张量
连续介质力学基础
克罗内克符号(Kronecker delta)
ij
1 0
i i
j j
1mam 1a 1 11a 2 21a 3 3 a 1
a a 2mam 2a 12a 2 22a 3 a 2 im m
i
3mam3a 13a 2 23a 3 3 a 3
如果e 1 ,e 2,e 3 是相互正交的单位矢量,则有 ei e j ij
变到 x1, x2 , x3 时,它们又是如何变换的。
如果变量系在变量xi中只有一个分量Φ,在变量 x 中i 只有一
个分量 ,并且在对应点,Φ 和 相等,则称为数量场。
(x1,x2,x3) (x1,x2,x3)
矢量与张量
连续介质力学基础
数量、向量和张量的解析定义
如果变量系在变量xi中有三个分量 i ,在变量x i 中有三个分
/
ei )
xi/ ijxj
矢量与张量
连续介质力学基础
一般坐标变换
一组独立的变量x1, x2, x3 可以一点在某一参考标架中的坐标。
通过方程 xi fi(x1,x2,x3) 把变量x1, x2, x3 变成一组新的变
量 x1, x2 , x3 这就规定了一个坐标变换。
逆变换 xi gi(x1,x2,x3)
绪论
连续介质力学基础
连续介质力学中的“基元”
时空系:
时间和空间是运动物体的客观存在形式。空间 表示物体的形状、大小和相互位置关系;时间 表示物体运动过程的顺序。
为描述物体的运动,需要在时间和空间中选取一特 定的标架,作为描述物体运动的的基准,这种标架 称为时空系。
绪论
连续介质力学基础
连续介质力学中的“基元”
连续介质力学(固体力学)讲解

连续介质力学 连续介质力学(Continuum mechanics)是物
理学(特别的,是力学)当中的一个分支,是处 理包括固体和流体的在内的所谓“连续介质”宏
观 性质的力学。
3
固体:固体不受外力时,具有确定的形状。固体包括不可变形的 刚体 和可变形固体。刚体在 一般力学 中的 刚体力学 研究;连续介 质力学中的 固体力学 则研究可变形固体,在应力,应变等外在因素 作用下的变化规律,主要包括 弹性 和 塑性 问题。
9
二、现代力学的发展及其特点
1、现代力学的发展
材料与对象: 金属、土木石等 新型复合材料、 高分子材料、 结构陶瓷、功能材料。
尺 度:宏观、连续体 含缺陷体,细、微观、 纳米尺度。
实验技术: 电、光测试实验技术 全息、超声、 光纤测量,及实验装置的大型化。
10
应用领域:航空、土木、机械、材料生命、微电 子技术等。
使工程结构分析技术;(结合CAD技术) 监测、控制技术(如振动监测、故障诊断); 工程系统动态过程的计算机数值仿真技术; 广泛应用至各工程领域。
材料设计:按所要求的性能设计材料。(90年代)
13
智能结构: 90年代开始,力学与材料、控制(包括 传感与激励)、计算机相结合,研究发展面向21世纪 的、具有“活”的功能的智能结构。
塑性 :应力作用后,不能恢复到原来的形状,发生永久形变。 弹性 :应力作用后,可恢复到原来的形状。 流体 :流体包括 液体 和 气体 ,无确定形状,可流动。流体最重 要的性质是 粘性 (viscosity,流体对由剪切力引起的形状的抵抗 力,无粘性的 理想气体 ,不属于流体力学的研究范围)。从理论研 究的角度,流体常被分为 牛顿流体 和 非牛顿流体 牛顿流体 :满足 牛顿粘性定律 的流体,比如水和空气。 非牛顿流体 :不满足 牛顿粘性定律 的流体,介乎于固体和牛顿 流体之间砄物质形态。
第六章-连续介质力学基础
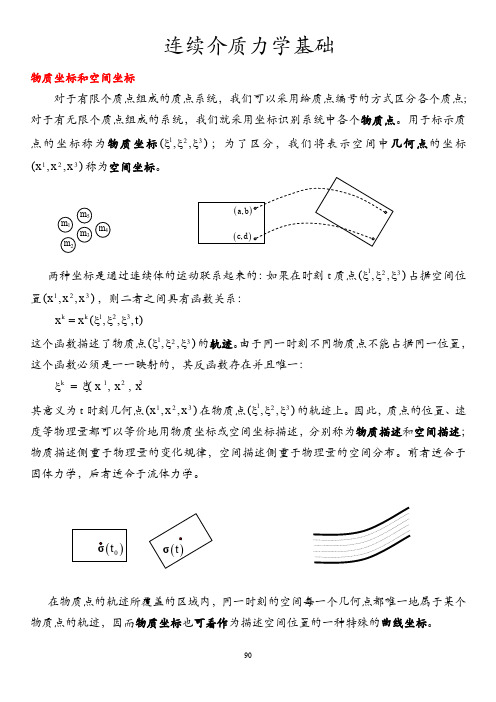
连续介质力学基础物质坐标和空间坐标对于有限个质点组成的质点系统,我们可以采用给质点编号的方式区分各个质点;对于有无限个质点组成的系统,我们就采用坐标识别系统中各个物质点。
用于标示质点的坐标称为物质坐标132(,,)ξξξ;为了区分,我们将表示空间中几何点的坐标312(x ,x ,x )称为空间坐标。
两种坐标是通过连续体的运动联系起来的:如果在时刻t 质点132(,,)ξξξ占据空间位置312(x ,x ,x ),则二者之间具有函数关系:k k 123x x (,,,t)=ξξξ这个函数描述了物质点132(,,)ξξξ的轨迹。
由于同一时刻不同物质点不能占据同一位置,这个函数必须是一一映射的,其反函数存在并且唯一:k k 123(x ,x ,x ,t )ξ=ξ 其意义为t 时刻几何点312(x ,x ,x )在物质点132(,,)ξξξ的轨迹上。
因此,质点的位置、速度等物理量都可以等价地用物质坐标或空间坐标描述,分别称为物质描述和空间描述; 物质描述侧重于物理量的变化规律,空间描述侧重于物理量的空间分布。
前者适合于固体力学,后者适合于流体力学。
在物质点的轨迹所覆盖的区域内,同一时刻的空间每一个几何点都唯一地属于某个物质点的轨迹,因而物质坐标也可看作为描述空间位置的一种特殊的曲线坐标。
物质坐标系基底矢量:i i ˆ∂=∂ξrg空间坐标基底基矢量:i i x∂=∂r g两者之间的转换关系为:k k i k i k i i x x ˆx ∂∂∂∂===∂ξ∂∂ξ∂ξr r gg ; j jm m ˆx ∂ξ=∂g g k k i k i i k i ˆx x x ∂∂ξ∂∂ξ===∂∂∂ξ∂r r g g; j jm m x ˆ∂=∂ξg g 物质导数保持物质坐标不变时,张量T 随时间的变化率称为张量的物质导数,记作D DtT或T 。
对物质描述的张量,物质导数就是对时间的偏导数;对空间描述的张量,物质导数是对时间的全导数。
连续介质力学

连续介质力学的应用领域包括:工 程力学、流体力学、固体力学、生 物力学等。
连续性假设:假设介质是连续的没 有空隙或裂缝
各向同性假设:假设介质在各个方 向上都是相同的
添加标题
添加标题
添加标题
添加标题
均匀性假设:假设介质在各个方向 上都是均匀的
小变形假设:假设介质的变形很小 不会影响其物理性质
流体:不可压缩、连续、无固定形状的 物质如空气、水等
多尺度连续介质力学:研究不同尺度下的连续介质力学问题如分子动力学、介观力学等
跨学科连续介质力学:与其他学科交叉如生物力学、环境力学等
计算连续介质力学:发展高效的计算方法和软件解决复杂问题如流体动力学、固体力学 等
PRT SIX
连续介质力学是研究流体和固体力学 的重要学科
连续介质力学的特点包括:连续性、 守恒性、对称性等
研究方法:数学模型、数值 模拟、实验验证等
研究对象:连续介质如液体、 气体、固体等
基本概念:应力、应变、位 移、速度、加速度等
应用领域:工程力学、流体 力学、固体力学等
PRT THREE
弹性力学的定义:研究弹性体在外力作用下的变形和应力分布的学科 弹性力学的基本假设:连续性假设、小变形假设、均匀性假设、各向同性假设 弹性力学的基本方程:平衡方程、几何方程、物理方程 弹性力学的应用:工程结构设计、地震工程、材料科学等
,
汇报人:
CONTENTS
PRT ONE
PRT TWO
连续介质力学是研究连续介质(如 液体、气体、固体等)在力作用下 的变形、流动和应力分布的学科。
连续介质力学的研究内容包括:应 力、应变、变形、流动、热传导等。
添加标题
添加标题
添加标题
力学讲义第六章连续介质力学

第六章 连续介质力学连续介质模型:物质(气,液,固)连续地分布在它们所占有的区域内连续介质质元: 宏观小, 微观大物质讨论宏观力: 包括外力以及外力作用下形变or 运动引起内部的弹性恢复力 讨论内力的一般方法:假想将其切开,切下部分的作用由内力代表;由平衡条件求力.例: (不计重力)连续介质是比质点、刚体更普遍的经典力学模型,应用也最普遍。
物理状态量在连续介质模型下成为点函数. 不计微观内力 §6.1 应力和应变6.1.1 应力固体为例截面π , 方位 n ; P 处邻域 ∆S 上 张力∆TP 处应力σ = lim ∆∆ TS = d T /dS =σ(P, n ) =σt +σn正应力(法向应力, 张力) σn 单位:P a (压强)(>0为拉应力 ; <0为压应力) 剪应力 (or 切应力) σt应力状态:对同一点P 处,方位不同的截面上应力σ不同。
函数关系σ=σP ( n)叫P 处的应力状态. 由平衡方程可以证明,互相垂直的三个截面上的6个应力(正,切应力)就可以完全决定一点处的应力状态 (由此6个应力可以计算出该处任意方位截面上的应力)应力主面: 该面上只有正应力, 称为主应力. 一点处必有三个互相垂直的应力主面6.1.2 应变固体有两种基本的应变形式:线(拉,压)应变 ;剪应变1. 线应变 ε均匀形变 : 长度l , 总形变∆l (截面法向x ) 则 εx = ∆l / l形变不均匀:一点处位移uAB 段形变=∆u x =u x (x+∆x) -u x (x)=∂∂u xx∆x A 处x 方向线应变εx = lim (∆u x /∆x) = ∂u x / ∂x类似: y 方向线应变 εz =∂u y / ∂y z 方向线应变 εz =∂u z / ∂z 一般情况下应变也是点函数, 不均匀形变时各处应变也不相同.应变是位移的空间变化率(位移的偏导数)2. 剪应变以xy 平面为例, 矩形 → 菱形定义:A 点剪应变(xy 平面上,小变形)为 εt = lim (δ1+δ2)= ∂u x /∂x + ∂u y /∂y δ1 ≈tan δ1=B’B’’/A’B’’=[u y (x+∆x) -u y (x)]/∆x → ∂u y /∂x 类似, 当 ∆x →0 , ∆y →0时 , δ2 → ∂u x /∂y3. 体应变均匀形变时, 体应变 εV = 体积增量/体积 =∆V / V不均匀形变时, 讨论一点处体应变一点附近小长方体(∆x,∆y,∆z) 小形变后为[(1+εx )∆x ,(1+εy )∆y, (1+εz )∆z] V=∆x ∆y ∆z ∆V ≈(εx +εy +εz )∆x ∆y ∆z 小变形 εV =εx +εy +εz 剪应变引起的体应变为高阶小量.自然状态无内力内力与外力平衡F F 内∆S →0 ∆x →0∆x →0∆y →0 y+∆侧平面)∆ll x∆x)6.1.3 胡克定律——应力和应变的关系 1678年胡克提出单向拉伸时 ε ∝ σ , 后来推广到三维 (实验定律) 1. 单一正应力引起的线应变 σx 引起 纵向线应变 εx = σx /Y 横向线应变εy =εz = -μεx = -μσx /Y Y —杨氏模量(压强量纲)μ ——泊松比(无量纲) 0≤ μ ≤ 0.5 σy , σz 的贡献类似 2. 总线应变与正应力的关系——广义胡克定律(在一定的形变范围内—比例极限) εx =1Y [σx -μ(σy +σz )] εy =1Y [σy -μ(σx +σz )] εz =1Y [σz -μ(σx +σy )] 3. 体应变与正应力εV =εx +εy +εz =(1-2μ)(εx +εy +εz )/Y ≡ σ0/K σ0≡(σx +σy +σz )/3 K=Y/[3(1-2μ)] K —体弹性模量 由4. 剪应变与剪应力εt =σt /G G —剪切弹性模量5. 各向同性固体只有两个独立的弹性模量, Y 、G 、K 、μ中只有两个独立K= Y / [3(1-2μ)] G=Y /2(1+μ) < Y一般 μ ≈ 0.35 G 、K 、Y 的量级为1010 —1011 P a , 差别不太大部分材料的弹性模量材料 铝 铜 金 电解铁 铅 铂 银 熔融石英 聚苯乙烯 K 7.8 16.1 16.9 16.7 3.6 14.2 10.4 3.7 0.41 G 2.5 4.6 2.85 8.2 0.54 6.4 2.7 3.12 0.133 Y 6.8 12.6 8.1 21 1.51 16.8 7.5 7.3 0.36 μ 0.355 0.37 0.42 0.29 0.43 0.30 0.38 0.17 0.353 说明: K 、G 、Y 的单位 为1010P a补充题4. 矩形截面杆在轴向拉应力σz =2.0⨯105 P a作用下变形,已知Y=19.6⨯1010 P a , μ=0.3 .求:εV 补充题5. 矩形悬臂梁的一端有作用力P.已知l =2 m, h=20cm,梁宽b=5 cm ,P=1000kg 力, 求梁内最大正应力§6.2 固体拉伸.弯曲.扭转讨论三种情况下的应力状态,计算应力与应变 6.2.1等截面直杆的拉压 圆形截面直杆;两端均匀压强p (拉>0;压<0)横截面 σz =p σt =0 应力状态: 与z 轴互垂两面上 σR =σφ=0 ——单向应力状态 ∴ σz =p= Y εz = Y ∆l / l 均匀形变 弹性形变势能: E P = ⎰ F 外du = ⎰0∆lSY u ldu=YS ∆l 2 / 2l u 为z 方向位移, S 为横截面积(近似不变) 弹性形变势能密度 e P =E P /V=12Y εz 2 =12σz εz (也适于不均匀形变) 说明:其他均匀截面直杆σR ≈0 σφ≈0 可以近似按圆杆处理6.2.2 矩形梁纯弯曲矩形梁(高h,宽b) 力偶矩M纵向画线弯曲:上短—压; 中不变—中性面; 下长—拉横截面上 σx , σt =0应力状态: σy =σz =0——单向应力状态M ⇒ 应力σx , 形变θ0P 处:εx= lim (PP’-oo’)/oo’= lim[(ρ+y)∆θ-ρ ∆θ]/ρ ∆θ=y/ρ σx =Y εx =Yy / ρ ∝ y 下面求ρ 横截面上:∑F =0 (∴中性面正在中点)∆θ→0 ∆θ→0 p z φM 内= ⎰y σx dS = Y ⎰ y 2 dS /ρ ≡YρI z =(应该)= M ——柏努力. 欧勒定律∴ Y/ρ = M/I z σx =M I z y σx max =M I z 2h ρ=YI z /M θ0 = l /ρ(θ0 为转角,代表形变;l 为中性面的长度) 定义对z 轴惯性矩 I z ≡ ⎰y 2 dS 对矩形截面 I z =2b ⎰02h /y 2dy =112bh 3 为节约材料:h ↑ , b ↓ ; 减少中性层还有鸟骨、麦杆…说明:(1)其他形状截面的梁在力偶矩作用下弯曲时,σy ≠ 0 σz ≠0, 非单向应力状态,但σy ≈0 σz ≈0 ,与单向应力状态偏差不大,可以近似按单向应力状态计算(2)非力偶矩作用时,一般可以忽略剪应力,近似按纯弯曲处理:(不计重力) 悬臂梁M 内=M(x)=P(l -x)简支梁 x ∈(0,l /2) M 内=M(x)= P x/2仍有: σx (x)=M(x) y/I z ρ(x) =YI z / M(x) 注意:σx (x),ρ(x),M(x)不再是常数 (3)仍有:e P =12Y εz 2 =12σz εz6.2.3 圆柱扭转表面画上圆周和母线圆周线不变, 横截面保持平面——横截面上 σtR =0应力状态: 横截面上 σt =σt φ σz =0 (只有M) σR =σφ=0 横截面上形变:圆周处εt (R)=R φ /h r 处εt (r)=r φ /h ∴ σt (r)=Gr φ /h ∝ r下面求φ M 内= ⎰ σt r dS = ⎰0R σt r 2πrdr=12h πGR 4φ ≡D φ =(应该)=M ∴G φ/h=2M/(πR 4) σt (r)= G φr/h M=D φ ∴ σt (r)=24M R πr σt max (r)=2M /πR 3 φ=M/D 扭转弹性系数 D=πGR 4/2h (悬丝扭矩 M=D φ D ∝ R 4/h ) 扭转弹性势能E P = ⎰0φM d φ=D φ2 /2 可证e P =12G εt 2 =12σt εt6.2.4 允许应力.强度计算1. 只有正应力or 剪应力材料极限应力(正or 剪)σj , 许可应力[σ]=σj /K 安全系数=1.4—3.0 — 14材料 屈服极限σs 强度极限σb 许可应力 [σ] (kg/cm 2)A 3 2200—2400 3800—4700 1700 16Mn 2900—3500 4800—5200 2300 300#水泥 拉21,压210 拉6,压105 红松(顺纹) 拉981,压328 拉65, 压100 注:A 3—普通低碳钢 16 Mn —低合金钢 常温、静态、一般工作条件材料中最大应力(正or 剪) 应满足 σmax ≤ [σ] 2. 复杂应力情况——按相应的强度理论计算§6.3 流体静力学——流体力平衡下内应力的分布 流体:液,气; 具流动性; 主要讨论液体; 设: 连续、均匀6.3.1 静止流体内应力δσt1. 一点处应力状态σt≡0 只有正应力σ , 且正应力大小与截面无关σ( n)≡σ证: 因为可流动流体静摩擦力=0 ∴σt≡0如图四面体受力平衡设S面上正应力为σ ,x向Sσ⋅x -σx S x=0σ=σ n S=S n S x=S ⋅ x∴σx S x=Sσ⋅x =σS⋅x= σS xσx=σ类似σy=σ=σzx,y,z任选, ∴任意截面上的正应力的大小皆为σ由四面体受力平衡, 从三个坐标平面的应力⇒任意截面S上的应力. 注意:忽略了体积力2. 流体内压强定义:流体内压强为P= -σ(流体中一般没有拉应力,∴σ<0 P>0)说明:(1)压强为标量,严格定义P= -σ0 = (σx+σy+σz) /3(2) 由一点处应力状态, σ与方位无关∴P与方位无关(3) 从证明知,关键σt=0 . 所以对理想流体(无内摩擦)在流动(包括加速流动)时结论也对(4)对粘滞性流体流动时有剪应力,各截面σ不相同.但若σt较小可以忽略,各截面正应力近似相等为σ , P ≈-σ(5) 流体中负压强(拉应力).特定条件(稳定,缓慢过程)下,流体中可出现负压. 水的负压可以达到300atm6.3.2 静止流体平衡方程——临近点处压强关系取小段柱状流体f—单位质量..上的体积外力x向: [P(x) - P(x+∆x)] ∆S + ρ∆S ∆x f x =0∴∂P /∂x = ρf x类似: ∂P /∂y = ρf y ∂P /∂z = ρf z合起来:∇P = (∂P/∂x) x +(∂P/∂y) y +(∂P/∂z) z = ρf 6.3.3 重力场中静流体1. 流体中压强随高度分布小范围g为常矢量f = (∆m g) /∆m =g = g y ∂P/∂x =∂P/∂z = 0 ⇒P与x,z无关, 在同一高度上P相等∂P/∂y = ρg若ρ为常数(液体or高度差不大的气体)积分得:P(y)=P0+ρgy P0=P(0)不同密度液体(鸡尾酒)的稳定分界面为水平面2. 帕斯卡定律定律:加在密闭液体中的压强等值地传到液体中各处以及壁上.解释: 设压强加在o处,使P0等值地改变,但ρgy 保持不变,所以P(y)随P0同样增加.3. 阿基米德定律定律:浸在流体中物体所受浮力等于物体排开的流体的重量证明:设物体外表面为S .流体对物体作用通过压强体现.∴浮力=⎰-Pd S保持S不变,则浮力不变. 将物体换成流体,该流体应处于平衡,即外界对S的压力之和等于流体重量:⎰-Pd S +m g =0∴浮力= -m g 浮力作用点即该流体重心(一般情况下不是物体的重心)附: 等温理想气体压强随高度的分布已知其密度ρ=cP (c为常数)解: dP/dy = -ρg = -cgP ⎰PPdPP= ⎰y-cg dy 得:P(y)=P0e-cgy又例: 以ω匀速转动的水平试管,内部充满流体. 以试管为参考系, 则惯性离心力为体积力,产生径向压强差.§6.4 流体的定常流动6.4.1 描述流体运动的两种方法1. 两种方法拉格郎日法: 认准各个质元,分别描述其运动状态(r i,v i,a i)及其变化规律r i,v i,a i只是t的函数, v=d r/dt , a=d v/dt ; 应用牛顿定律必须用拉格郎日法. 困难:如何认准?如何跟踪?描述不便欧拉法: 讨论流体场(流体性质场)的场分布∆x)主要是流速场v=v(r,t) . 还有a=a(r,t)P=P(r,t) 压强场……2. 欧拉法中质元的加速度质元加速度a = d v/dt (速度全导数or实质导数)是对一个确定质元速度v(即拉格郎日法中的速度v)的导数.流速场v(r,t)在地点不变下对t的偏导数∂v/∂t ≠a (流速场中同一地点不同时刻的v是不同质点的速度)认准m i :a=d v(x,y,z,t)/dt=∂v/∂t+[∂∂vxdx +∂∂vydy+∂∂vzdz]/dt=∂∂vt+v x∂∂vx+v y∂∂vy+v z∂∂vz=∂∂vt+ v ⋅∇v3. 流体流动的图象表示拉格郎日法: 流体质元的实际运动轨迹——迹线流管——流线围成的细管;流束——流管中流体6.4.2定常流动: v与t无关,v=v(r) ;不定常流动: v与t有关定常流动特点:∂v/∂t =0 a = v⋅∇v≠ 0流线不变,与迹线重和∴迹线也不变P,ρ与t无关是否为定常流与参考系有关设迹线如图. V1,2,3为t1,2,3时刻同一质点的速度.若v与t无关,则v也是速度场中1,2,3点的速度,迹线也是流线. 迹线不变则场中质元数不变,∴ρ不变圆柱在理想流体在匀速直线运动. 在静系中流体为非定常流动,在圆柱参考系中为定常流动§6.6 粘滞流体的流体长时间、长距离、相对速度很大时,粘滞性不可忽略主要讨论层流. 层流:流体分层流动,彼此不混淆流体粘滞性的体现:固、液相对运动时出现摩擦力;液体内部流速不同,各层之间出现摩擦力6.6.1流体的粘滞性板A匀速直线运动引起层流,各层之间粘滞力fz层假想剖面∆S, 两侧粘滞力∆f牛顿摩擦定律:(实验定律) ∆f ∝ (dv/dz) ∆S 即∆f = ηdvdz∆Sdv/dz : z方向速度(空间)变化率(速度梯度)η: 粘滞系数(黏度)温度T↑⇒η↓ (液体) η↑(气体)(f本质: 液体主要来自层之间分子力;气体是通过该层交换宏观定向动量)[η]=ML-1T -1SI(MKS)制为Pa ⋅s CGS制为“泊”1泊=0.1 Pa⋅s η/ρ——运动黏度(比黏度)满足牛顿摩擦定律的流体——牛顿流体(否则叫非牛顿流体—少数如血液)6.6.2 粘滞流体的运动规律1. 动力学方程(介绍) 纳维—斯托克斯方程(Nevier,M. , Stokes,G.G.)-∇P+ρf+η∇2 v = ρ (d v/dt)2. 修改后的伯努力方程定常流动,不可压缩,沿流管(有粘滞性) 由功能原理dW粘1→2 +(P1-P2)dV = dE= (dm v22/2+dm gz2)-(dm v12/2+dm gz1)dm=ρdV∴ P1+ρv12/2+ρgz1=P2+ρv22/2+ρgz2 +w12——修正后的伯努力方程∆t)∆t)m i运动轨迹m质点t2t时刻:3流线w 12 = -w 粘1→2 = dW 粘1→2 /dV >0 为单位体积..流体克服..粘滞阻力做的功水平均匀细管中: v,z 相同, P 1 -P 2=w 12=P 2 -P 3=…=P 0’-P 1=ρg(H 1-H 2)=…=ρg ∆H=ρg(H 0’-H 1) ∴P 0’-P B =P 0’-P 0=ρgH 0’=w 细管 将液面A 与出口B 联系:P 0+ρgH 0+0=P 0+0+ρv 2/2+w 细管+w 粗管∴ρv 2/2=ρg(H 0-H 0’) -w 粗管=ρgh 0-w 粗管≈ρgh 0 v ≈(2gh 0)1/2w 细管, w 粗管分别是单位体积流体在细管和粗管中流动克服阻力做的功∴粘滞流体水平均匀流动必有压强差——流水水面不水平 , 熔岩流动高度差很大3. 哈根—泊肃叶(Hagen,G. , Poiseuille, J.L.M.)方程——水平圆管层流哈—泊定律由哈根1839年实验证实, 后为泊肃叶1842年独立发现水平圆管, 定常流动柱坐标(r,φ,z)v z 与r,φ无关v =v z (r)z d v /dt=0忽略体积力f =0 , 流线平行直线, ∴同一横截面上P 相同对小圆柱, 1、2两横截面上对应处速度相同 ∴合外力为零 即 (P 1-P 2)πr 2 + ηdv drz⋅2πr l =0 (f 粘为-z 方向, dv z /dr<0 ∴取 “+”)⎰0v r z ()dv z = ⎰R r -12ηl(P 1-P 2)r drv z (r)= (P 1-P 2)(R 2 -r 2) / (4ηl ) Q V = ⎰ v ⋅ d S = ⎰0Rv z 2πr dr = π(P 1 -P 2)R 4 / (8ηl ) ——哈—泊公式由此可以讨论石油、天然气、水输送问题(管径、压差与流量);隧道、河流的流量…平均流速 v =Q V /S= (P 1 -P 2)R 2 / (8ηl ) P 1 -P 2=8ηv l R -2 ∝ l R -2,l光滑金属管光滑同心环缝滑阀口Re C2000—2300 1100 260例. 日常生活. 水管d=0.025m Re C =2000 1atm 20︒C时η=1.0⨯10 -3Pa⋅ s 则临界水流速v C = ηRe C /ρd = 0.079 m/s∴一般管流为湍流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A 2 CA ACA 2 I1 ( A) ACA I 3 ( A)C tr( AC) A 2 [I 1 ( A) tr( AC) tr( A 2 C)]A I 3 ( A) tr( C)I A 2 CA 2 I 2 ( A) ACA I 3 ( A)( AC CA )
兑关锁 Dui Guansuo
Beijing Jiaotong University
Institute of Engineering Mechanics
非线性连续介质力学中通常其物理量可表示为两种不同形 式, 一种是Hill在应变主轴标架思想基础上系统发展起来的主轴 表示。但主轴法是在主标架给出的,不仅需要求解特征值而且 需要计算相应的特征向量,主轴法将耗费很大的计算量。为了 避免计算特征值及其特征向量, 物理量还可以表示为与坐标无关 的不变性表示形式, 不变性表示理论及其在连续介质力学中的应 用吸引了众多学者的研究兴趣。 例如
Trusdell, Noll, Coleman, CC Wang, C-s Man
Hill, Ogden 国内教材
兑关锁 Dui Guansuo
Beijing Jiaotong University
Institute of Engineering Mechanics
郭仲衡
兑关锁 Dui Guansuo
In particularly, for n=3
A 3 I1A 2 I 2 A I 3I 0
The number of useful results can be extracted from the Cayley– Hamilton theorem.
兑关锁 Dui Guansuo
Beijing Jiaotong University
•4. Stress
Conjugate stress, Stress rate
•5 Applications in computational mechanics
Eigenvalues and eigenvectors, Tangent stiffness, Anisotropic materials
连续介质力学中物理量的不变性表示
兑关锁
北京交通大学工程力学研究所
兑关锁
Dui Guansuo
发展历史
Beijing Jiaotong University
Institute of Engineering Mechanics
①奠基时期。牛顿的《自然哲学的数学原理》是理性力学的第一部著 作。J.le R.达朗贝尔1743年提出理性力学的框架。D.Hilbert 1900年提出的 23个问题中的第6个问题就是公理化问题。 ②停滞时期。约从20世纪初到1945年。这段时期形成了以从事线性力 学及其相关数学的研究为主的局面。非线性理论的研究没有多大进展, 理性力学也因此处于停滞时期。 ③复兴时期。巨大的变化发端于1945年M.Reiner和1948年R.S.Rivlin的 工作。C.Truesdell 1953年提出低弹性体的概念。同年,J.L.Ericksen发表 了各向同性不可压缩弹性物质中波的传播理论。 ④发展时期。1966年以后,理性力学进入发展时期。 Rivlin, Pipkin, Smith, Carroll, Ting, Gurtin, Fosdick, Carlson Ericksen, Beatty, Batra, Y-C Chen
Beijing Jiaotong University
Institute of Engineering Mechanics
工程力学研究所 (IEM)
兑关锁 Dui Guansuo
Beijing Jiaotong University
Institute of Engineering Mechanics
Another important set of invariants is the moments I k tr A k Its derivative two trace identities
I k 1 (k 1)( A k ) T A I k 1 I k 1 tr (k 1) I k tr (n k ) I k A A
E ( 0 ) ln U lni Ni Ni
i
工欲善其事,必先利其器
兑关锁 Dui Guansuo
Contents
•1. Tensor analysis
Beijing Jiaotong University
Institute of Engineering Mechanics
Tensor identities, Representation of tensor functions, Tensor equations, Derivative of tensor function兑关锁 Dui Nhomakorabeauansuo
1. Tensors analysis
1.1 Tensors identities
Beijing Jiaotong University
Institute of Engineering Mechanics
As a useful tool, tensor identities involving multi-variables are successfully used to solve many problems in continuum mechanics, such as, the solutions of tensor equations (Scheidler 1994, Hoger and Carlson 1984) and representation theorems for isotropic tensor functions (Rivlin and Ericksen 1955). Several identities have been derived by Rivlin (1955) through matrix calculations. In the present work, several tensor identities involving second order tensors C, A and its transpose are presented in 3-dimensions. Then they are extended to n-dimensions. By using the properties of the derivatives of the principal invariants, some tensor identities, such as Rivlin’s identities, are derived directly by a new method.
兑关锁 Dui Guansuo
Beijing Jiaotong University
Institute of Engineering Mechanics
Cayley–Hamilton theorem
Let A be a second order tensors in n dimensions.
A n I1 A n 1 I 2 A n 2 (1) n I n I 0
where the scalars I 1 , I 2 , , and I n are the principal invariants of A. Then, we have (Gantmakher, 1959 )
(1) k 1 Ik tr( A k I1 A k 1 I 2 A n 2 (1) k 1 I k 1 A) k
陈至达
Beijing Jiaotong University
Institute of Engineering Mechanics
高玉臣院士
兑关锁 Dui Guansuo
0引
言
Beijing Jiaotong University
Institute of Engineering Mechanics
连续介质力学 是研究连续介质的宏观力学行为。连续介质力学用统一的观点 来研究固体和流体的力学问题,因此也有人把连续介质力学狭义地理解为理 性力学。 研究内容﹕ 1变形几何学:研究连续介质变形的几何性质, 这里包括诸如运动、构形﹑变 形梯度﹑应变张量﹑变形的基本定理﹑极分解定理等重要概念。 2运动学:主要研究连续介质力学中各种量的时间率 , 这里包括诸如速度梯度、 变形速率和旋转速率, Rivlin-Ericksen张量等重要概念。 3基本方程: 根据适用于所有物质的守恒定律建立的方程﹐例如:连续性方程、 运动方程、能量方程、熵不等式等。 4本构关系。 5特殊理论:例如弹性理论、粘性流体理论、塑性理论、粘弹性理论、热弹性 固体理论、热粘性流体理论等。 6问题的求解。 主要数学工具: 张量
A2C CA2 ACA I1 (A)(AC CA) I2 (A)C
2
m 1 A m [C] A i CA m 1i A i 0
(Dui and Chen, J. Elast. 76:
2004)
tr(C)A [I1 ( A) tr(C) tr( AC)]A [I1 ( A) tr( AC) I2 ( A) tr(C) tr( A 2C)]I
兑关锁 Dui Guansuo
Beijing Jiaotong University
Institute of Engineering Mechanics
Rivlin’s identities
For any positive integer m, it is well known that The derivative of Cayley-Hamilton theorem yields