GPS(5):GPS星历计算
GPS卫星的坐标计算
第三章GPS 卫星的坐标计算在用GPS 信号进行导航定位以及制订观测计划时,都必须已知GPS 卫星在空间的瞬间位置。
卫星位置的计算是根据卫星导航电文所提供的轨道参数按一定的公式计算的。
3.1卫星运动的轨道参数3.1.1基本概念 1.作用在卫星上力卫星受的作用力主要有:地球对卫星的引力,太阳、月亮对卫星的引力,大气阻力,大气光压,地球潮汐力等。
中心力:假设地球为匀质球体的引力(质量集中于球体的中心),即地球的中心引力,它决定卫星运动的基本规律和特征,决定卫星轨道,是分析卫星实际轨道的基础。
此种理想状态时卫星的运动称为无摄运动,卫星的轨道称为无摄轨道。
摄动力:也称非中心力,包括地球非球形对称的作用力、日月引力、大气阻力、大气光压、地球潮汐力等。
摄动力使卫星运动产生一些小的附加变化而偏离理想轨道,同时这种偏离量的大小随时间而改变。
此种状态时卫星的运动称为受摄运动,卫星的轨道称为受摄轨道。
虽然作用在卫星上的力很多,但这些力的大小却相差很悬殊。
如果将地球引力当作1的话,其它作用力均小于10-5。
2.二体问题研究两个质点在万有引力作用下的运动规律问题称为二体问题。
3.卫星轨道和卫星轨道参数卫星在空间运行的轨迹称为卫星轨道。
描述卫星轨道状态和位置的参数称为轨道参数。
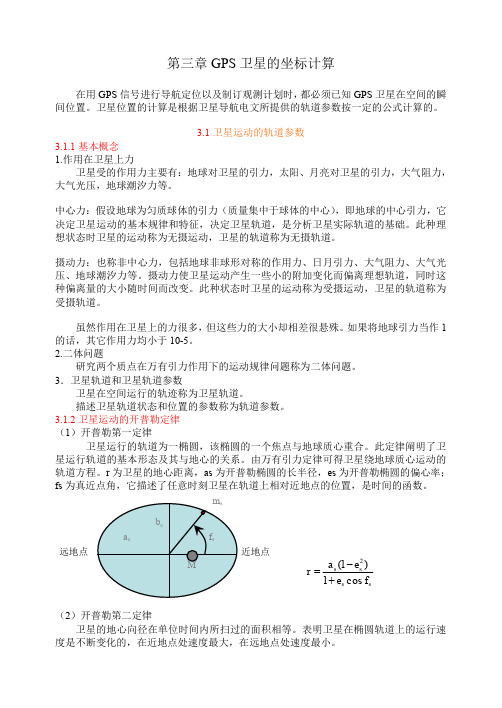
3.1.2卫星运动的开普勒定律 (1)开普勒第一定律卫星运行的轨道为一椭圆,该椭圆的一个焦点与地球质心重合。
此定律阐明了卫星运行轨道的基本形态及其与地心的关系。
由万有引力定律可得卫星绕地球质心运动的轨道方程。
r 为卫星的地心距离,as 为开普勒椭圆的长半径,es 为开普勒椭圆的偏心率;fs 为真近点角,它描述了任意时刻卫星在轨道上相对近地点的位置,是时间的函数。
(2)开普勒第二定律卫星的地心向径在单位时间内所扫过的面积相等。
表明卫星在椭圆轨道上的运行速度是不断变化的,在近地点处速度最大,在远地点处速度最小。
近地点远地点ss s s f e e a r cos 1)1(2+-=(3卫星运行周期的平方与轨道椭圆长半径的立方之比为一常量,等于GM 的倒数。
GPS广播星历计算卫星位置和速度

GPS广播星历计算卫星位置和速度GPS(全球定位系统)是一种通过卫星定位的技术,它利用卫星发射的广播星历来计算卫星的位置和速度。
星历数据是需要事先计算和上传给卫星的。
在GPS系统中,有31颗运行在中轨道上的卫星,其中至少有24颗是激活状态的。
这些卫星分布在不同的轨道上,每个轨道上约有4颗卫星。
卫星轨道分为6个球形环,每个环的倾角不同,倾角越大表示距离地球赤道越远。
每颗GPS卫星都具有精确的时钟,它们通过广播信号发送自身的位置和速度信息。
这些广播信号被接收器接收后,通过计算接收时间差来确定卫星与接收器之间的距离。
利用三个以上的卫星的广播信号,可以计算出接收器所在的位置。
星历数据是卫星的位置和速度信息,它用于计算接收器附近的卫星位置和速度。
星历数据包括每颗卫星的轨道参数(半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、运动角频率)、卫星钟差和卫星偏差改正参数等。
星历数据的计算是一个复杂的过程,需要考虑多个因素。
首先,需要从测量数据中估算卫星位置和速度。
接着,根据卫星轨道的数学模型和测量数据,通过插值和拟合等算法计算出卫星的位置和速度数据。
最后,通过计算误差和改正项进行数据校正。
这些校正项包括大气延迟、钟差、轨道摄动等。
星历数据的计算过程是集中在地面控制站完成的,然后通过双向通信链路上传给卫星。
卫星接收到星历数据后,会将其存储在内部存储器中,并通过广播信号发送给地面的接收器。
在接收器接收到卫星广播信号后,会利用星历数据来计算卫星与接收器之间的距离。
首先,接收器会粗略估算卫星位置,然后通过星历数据进行细化校正,最终得到精确的卫星位置和速度信息。
利用卫星位置和速度信息,接收器可以计算出自身的位置。
通过接收多个卫星的广播信号,接收器可以确定自身在地球的经度、纬度和海拔高度。
在接收器上,还可以通过计算卫星位置的变化来确定速度。
通过不同时刻测量卫星位置的变化,可以计算出接收器的速度矢量。
总结起来,GPS广播星历是用于计算卫星位置和速度的关键数据。
gps定位原理和简单公式

GPS定位原理和简单公式全球定位系统(Global Positioning System)是美国第二代卫星导航系统。
是在子午仪卫星导航系统的基础上发展起来的,它采纳了子午仪系统的成功经验。
和子午仪系统一样,全球定位系统由空间部分、地面监控部分和用户接收机三大部分组成。
按目前的方案,全球定位系统的空间部分使用24颗高度约2.02万千米的卫星组成卫星星座。
21+3颗卫星均为近圆形轨道,运行周期约为11小时58分,分布在六个轨道面上(每轨道面四颗),轨道倾角为55度。
卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位解算精度的几何图形(DOP)。
这就提供了在时间上连续的全球导航能力。
地面监控部分包括四个监控站、一个上行注入站和一个主控站。
监控站设有GPS用户接收机、原子钟、收集当地气象数据的传感器和进行数据初步处理的计算机。
监控站的主要任务是取得卫星观测数据并将这些数据传送至主控站。
主控站设在范登堡空军基地。
它对地面监控部实行全面控制。
主控站主要任务是收集各监控站对GPS卫星的全部观测数据,利用这些数据计算每颗GPS卫星的轨道和卫星钟改正值。
上行注入站也设在范登堡空军基地。
它的任务主要是在每颗卫星运行至上空时把这类导航数据及主控站的指令注入到卫星。
这种注入对每颗GPS卫星每天进行一次,并在卫星离开注入站作用范围之前进行最后的注入。
全球定位系统具有性能好、精度高、应用广的特点,是迄今最好的导航定位系统。
随着全球定位系统的不断改进,硬、软件的不断完善,应用领域正在不断地开拓,目前已遍及国民经济各种部门,并开始逐步深入人们的日常生活。
上述四个方程式中待测点坐标x、y、z 和Vto为未知参数,其中di=c△ti (i=1、2、3、4)。
di (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4到接收机之间的距离。
△ti (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的信号到达接收机所经历的时间。
GPS导航定位原理以及定位解算算法

G P S导航定位原理以及定位解算算法TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1 地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ 构成右手坐标系(即指向东经90度方向)。
GPS考试名词解释简答

1卫星星历:是描述卫星运动轨道的信息,是一组对应某一时刻的轨道根数及其变率。
根据卫星星历可以计算出任时刻的卫星位置及其速度,GPS卫星星历分为预报星历和后处理星历。
2广播星历:是定位卫星发播的无线电信号上载有预报一定时间内卫星根数的电文信息。
3导航电文:导航信息的二进制数据码。
包括卫星星历、时钟改正数、卫星工作状态、轨道摄动改正、大气折射改正等信息。
4无摄运动:仅考虑地球质心引力作用的卫星运动称为无摄运动。
5受摄运动:在摄动力的作用下的卫星运动称为受摄运动。
6载波重建:重建载波相位是输入的(经多普勒位移的)GPS载波相位与接收仪产生的(名为固定的)参考频率相位,两者之的差。
7周跳:在GPS载波相位观测中,因卫星信号失锁引起的相位整周跳变。
8章动:指真北天极绕平北天极所做的顺时针椭圆运动。
9重复基线闭合差:当某条基线被两个或多个时段观测时,就构成了所谓的重复基线闭合差条件。
(不同观测时段,对于同一条基线的观测结果就是重复基线)10世界时:以平子夜为0时起算的格林威治平太阳时UT。
11岁差:地球在绕太阳运行时,地球自转轴的方向在天球上缓慢移动,春分点在黄道上随之缓慢移动的现象。
12黄道:地球绕太阳公转的轨道平面称为黄道面,它与天球相交的大圆称为黄道。
它就是当地球绕太阳公转时,观测者所看到的太阳在天球上运动的轨道。
13 伪距:GPS定位采用的是被动式单程测距。
它的信号发射时刻是卫星钟确定的,收到时刻则是由接收机钟确定的,这就在测定的卫星至接收机的距离中,不可避免地包含着两台钟不同步的误差影响,所以称其为伪距。
14整周未知数:指卫星信号从发射时刻到接收机接受时刻这个阶段载波的整个周数。
15升交点:指当卫星轨道平面与地球赤道平面的夹角即轨道倾角不等于零时,轨道与赤道面有两个交点,卫星由南向北飞行时的交点称为升交点。
16升交点赤经:含地轴和春分点的子午面与含地轴和升交点的子午面之间的交角等。
17真近点角:天体从近点起沿轨道运动时其向径扫过的角度。
gps周计算公式

gps周计算公式
GPS周计算公式是用于计算GPS接收器中的系统周数的公式。
GPS系
统周数是GPS时间的一个计数,它从1980年1月6日午夜开始计数,每
周精确到秒级,相对于GPS系统识别时间提供连续计数。
计算GPS周数具
有很重要的实际应用,包括地球动力学、航空航天导航、大地测量、使用GNSS进行测量以及其他需要准确时间的应用等。
GPS周计算公式通常基于文氏模型(Wenceslas)或并发GPS时间(SIGT)模型建立。
这两种模型都是从GPS时间信号中进行实时计算,并提供一个
近似的GPS周计算公式。
下面将具体介绍这两种模型及其相关的GPS周计
算公式。
1. 文氏模型(Wenceslas)
文氏模型是最早使用的GPS周计算模型之一、它使用了诸如$10^9$精
确度的GPS原子钟信号,该模型在精确度和计算复杂度之间取得了平衡。
文氏模型的GPS周计算公式基于以下公式:
2.并发GPS时间(SIGT)模型
并发GPS时间模型是一种更为准确和复杂的GPS周计算模型。
它使用
了最先进的星历定位技术和精确的信号传播模型,提供了更为精确的结果。
并发GPS时间模型的GPS周计算公式基于以下公式:
需要注意的是,在实际使用中,这些公式可能会针对不同的应用领域
进行一些修正和适应,以获得更为准确的结果。
并且,由于GPS接收器的
精度和处理算法的不同,其算法和公式也可能会有所不同。
总结起来,GPS周计算公式是通过使用GPS接收器观测到的原子钟信号和参考时间,将信号时间转换为GPS系统的周数。
这些公式基于不同的模型和算法,旨在提供准确和可靠的结果。
GPS考试重点题目 (5)

GPS测量试题集及答案一、判断题(×)1、相对定位时,两点间的距离越小,星历误差的影响越大。
(√)2、采用相对定位可消除卫星钟差的影响。
(√)3、采用双频观测可消除电离层折射的误差影响。
(×)4、采用抑径板可避免多路径误差的影响。
(√)5、电离层折射的影响白天比晚上大。
(√)6、测站点应避开反射物,以免多路径误差影响。
(×)7、接收机没有望远镜,所以没有观测误差。
(√)8、精度衰减因子越大,位置误差越小。
(√)9、精度衰减因子是权系数阵主对角线元素的函数。
(√)10、97规程规定PDOP应小于6。
(√)11、强电磁干扰会引起周跳。
(√)12、双差可消除接收机钟差影响。
(√)13、差分定位与相对定位的主要区别是有数据链。
(√)14、RTD就是实时伪距差分。
(×)15、RTK就是实时伪距差分。
(√)16、实时载波相位差分简称为RTK。
(×)17、RTD的精度高于RTK。
(√)18、GPS网的精度是按基线长度中误差划分的。
(√)19、97规程中规定的GPS网的精度等级有5个,最高精度等级是二等。
(√)20、GPS网中的已知点应不少于三个。
(√)21、尺度基准可用测距仪测定。
(√)22、AA级网的比例误差系数应不超过10E-8。
(√)23、四等GPS网的基线长度相对中误差应不超过1/45000。
(√)24、四等GPS网的基线长度相对中误差应不超过1/45000。
(×)25、同步观测基线就是基线两端的接收机同时开机同时关机。
(√)26、同步环就是同步观测基线构成的闭合环。
(√)27、边连式就是两个同步图形之间有两个共同点。
(×)28、预报DOP值的文件是星历文件。
(×)29、应当选择DOP值较大的时间观测。
(×)30、作业调度就是安排各作业组到各个工地观测。
(×)31、接收机号可以不在现场记录。
(×)32、点之记就是在控制点旁做的标记。
第03章 卫星运动基础及GPS卫星星历

动。
§3.3 卫星的受摄运动
• 概述
G • 讨论二体问题时,六个轨道参数均为常数。 P 其中卫星过近地点的时刻τ也可用平近点角M0 S 代替。在考虑了摄动力的作用后,卫星的受 测 摄运动的轨道参数不再保持为常数,而是随 量 原 时间变化的轨道参数。卫星在地球质心引力 理 和各种摄动力总的影响下的轨道参数称为瞬 及 时轨道参数。卫星运动的真实轨道称为卫星 应 用 的摄动轨道或瞬时轨道。瞬时轨道不是椭圆,
2 影响卫星运行轨道的因素
G P S 测 量 原 理 及 应 用
GPS地球卫星在空间绕地球运行,除受地球引力作用外,
还受到日、月和其它天体的引力影响,以及太阳光压、大气 阻力和地球潮汐力等因素的影响。卫星的实际轨道变得非常 复杂,有不确定性,无法用简单而精确的数学模型描述。 各种作用力中, 地球引力的影响最大,其他作用力的影响
用用星历参数含义卫星prn06radradradsiradscusradcucradcisradcicradcrsmcrcmgpdctgdsiodcn卫星精度n卫星健康n卫星钟差时间偏差卫星钟速频率偏差系数卫星钟速变率漂移系数星历表参考历元星历表的数据龄期aode轨道长半径的平方根轨道偏心率按参考历元t0e计算的轨道倾角近地点角距按参考历元t0e计算的升交点赤经按参考历元t0e计算的平近点角平均角速度之差升交点赤经变化率轨道倾角的变化率纬度幅角的正弦调和项改正的振幅纬度幅角的余弦调和项改正的振幅轨道倾角的正弦调和项改正的振幅轨道倾角的余弦调和项改正的振幅轨道半径的正弦调和项改正的振幅轨道半径的余弦调和项改正的振幅gps周数载波l1和l2的电离层时延迟差星钟的数据龄期aodc0231899321079e060720000000000e040970000000000e020515365263176e040678421219345e020958512160302e000258419417299e010137835982556e010290282040486e000451411660250e080819426989566e080253939149013e090912137329578e050189989805222e060949949026108e070130385160446e070406250000000e010201875000000e030931000000000e030186264514923e080353000000000e030700000000000e01用用为了保持卫星预报星历的必要精度一般采用限制预报星历外推时间间隔的方法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2、广播星历文件格式(2)
•
• • • • • • • • • • • • • • • •
+--------------------------------+--------------------------------------------------------+-----------------+ *|ION ALPHA | Ionosphere parameters A0-A3 of almanac | 2X,4D12.4 |* | | (page 18 of subframe 4) | | +--------------------------------+---------------------------------------------------------+----------------+ *|ION BETA | Ionosphere parameters B0-B3 of almanac | 2X,4D12.4 |* +---------------------------------+--------------------------------------------------------+----------------+ *|DELTA-UTC: A0,A1,T,W | Almanac parameters to compute time in UTC | 3X,2D19.12, |* | | (page 18 of subframe 4) | 2I9 | | | A0,A1: terms of polynomial | | | | T : reference time for UTC data | *) || | | W : UTC reference week number. | | | | Continuous number, not mod(1024)! | | +---------------------------------+-------------------------------------------------------+-----------------+ *|LEAP SECONDS | Delta time due to leap seconds | I6 |* +--------------------------------+--------------------------------------------------------+-----------------+ |END OF HEADER | Last record in the header section. | 60X | +--------------------------------+--------------------------------------------------------+-----------------+
GPS星历计算
由广播星历计算GPS卫星在 地固系中的位置
提历参数 3. 卫星位置计算 4. 精密星历文件
一、广播星历
1.1、Leica接收机产生的广播星历文件
ASTECH产生的广播星历文件
1.2、广播星历文件格式
GPS导航文件头格式
+------------------------------------------------------------------------------------------------------------- + | TABLE A3 | | GPS NAVIGATION MESSAGE FILE - HEADER SECTION DESCRIPTION | +-------------------------------+-------------------------------------------------+--------------------------+ | HEADER LABEL | DESCRIPTION | FORMAT | | (Columns 61-80) | | | +-------------------------------+--------------------------------------------------+-------------------------+ |RINEX VERSION / TYPE| - Format version (2.10) | F9.2,11X, | | | - File type ('N' for Navigation data) | A1,19X | +-------------------------------+--------------------------------------------------+-------------------------+ |PGM / RUN BY / DATE | - Name of program creating current file | A20, | | | - Name of agency creating current file | A20, | | | - Date of file creation | A20 | +-------------------------------+--------------------------------------------------+--------------------------+ *|COMMENT | Comment line(s) | A60 |* +-------------------------------+--------------------------------------------------+--------------------------+
1.2、广播星历文件格式(4)
+--------------------------------+--------------------------------------------------------+-----------------+ | BROADCAST ORBIT – 3 | - Toe Time of Ephemeris | 3X,4D19.12 | | | (sec of GPS week) | | | | - Cic (radians) | | | | - OMEGA (radians) | | | | - CIS (radians) | | +--------------------------------+--------------------------------------------------------+-----------------+ | BROADCAST ORBIT – 4 | - i0 (radians) | 3X,4D19.12 | | | - Crc (meters) | | | | - omega (radians) | | | | - OMEGA DOT (radians/sec) | | +--------------------------------+--------------------------------------------------------+----------------+ | BROADCAST ORBIT – 5 | - IDOT (radians/sec) | 3X,4D19.12 | | | - Codes on L2 channel | | | | - GPS Week # (to go with TOE) | | | | Continuous number, not mod(1024)! | | | | - L2 P data flag | | +--------------------------------+--------------------------------------------------------+----------------+ | BROADCAST ORBIT – 6 | - SV accuracy (meters) | 3X,4D19.12 | | | - SV health (bits 17-22 w 3 sf 1) | | | | - TGD (seconds) | | | | - IODC Issue of Data, Clock | | +--------------------------------+-------------------------------------------------------+-----------------+ | BROADCAST ORBIT – 7 | - Transmission time of message **) | 3X,4D19.12 | | | (sec of GPS week, derived e.g. | | | | from Z-count in Hand Over Word (HOW) | | | | - Fit interval (hours) | | | | (see ICD-GPS-200, 20.3.4.4) | | | | Zero if not known | | | | - spare | | | | - spare | | +--------------------------------+-------------------------------------------------------+-----------------+