ADAMS实例仿真解析
用ADAMS进行凸轮机构模拟仿真示例

用ADAMS进行凸轮机构模拟仿真示例引言在机械工程领域,凸轮机构是一种常见的机构组成部分,广泛应用于工业生产和制造。
凸轮机构的设计需要考虑到凸轮曲线的形状和运动参数对传动性能的影响。
为了评估和优化凸轮机构的性能,我们可以使用计算机仿真软件进行凸轮机构的模拟仿真。
ADAMS是一款被广泛应用于机械系统仿真的软件工具,本文将通过一个示例来介绍如何使用ADAMS进行凸轮机构的模拟仿真。
凸轮机构概述凸轮机构是一种将轮廓复杂的凸轮运动传递给连杆的机构。
它通常由凸轮、从动件和驱动件构成。
凸轮是核心部分,它的轮廓决定了从动件的运动轨迹。
通过凸轮的运动,从动件可以实现往复、旋转或其他特定的运动方式。
凸轮机构在内燃机、机床、汽车等领域得到广泛应用。
ADAMS概述ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于机械系统动力学仿真的软件工具。
它提供了丰富的建模元素,可以快速和准确地建立机械系统的模型,并通过求解动力学方程来模拟机械系统的运动。
ADAMS具有友好的用户界面和强大的计算功能,被广泛应用于机械工程领域的仿真和优化。
凸轮机构模拟仿真示例为了演示如何使用ADAMS进行凸轮机构的模拟仿真,我们将以一个简单的例子来说明。
假设我们要设计一个四连杆机构,其中一根连杆由凸轮驱动。
该凸轮的轮廓为心形曲线,从动件为简单的滑块。
首先,我们需要建立凸轮机构的模型。
在ADAMS中,可以通过创建凸轮、连杆、滑块等元素来建立凸轮机构的模型。
通过定义凸轮的曲线形状和连杆的运动参数,我们可以构建出凸轮机构的模型。
接下来,我们需要定义凸轮机构的运动条件。
在ADAMS中,可以通过设置凸轮的运动方式和频率来定义凸轮机构的运动条件。
根据凸轮的运动,ADAMS可以自动计算连杆的运动轨迹。
然后,我们可以进行凸轮机构的模拟仿真。
在ADAMS中,可以通过启动仿真来模拟凸轮机构的运动。
ADAMS会计算连杆的运动轨迹、速度、加速度等参数,并显示在仿真结果中。
msc adams多体动力学仿真基础与实例解析

MSC Adams是一种常用的多体动力学仿真软件,它可以用于研究和分析机械系统、运动学和动力学特性。
下面简要介绍MSC Adams的基础知识和实例解析:
1. 多体动力学基础:
-刚体和连接:MSC Adams使用刚体模型来表示物体,可以定义物体的质量、惯性矩阵和几何形状。
通过连接件(约束)将多个物体连接在一起,可以模拟各种机构系统。
-动力学模型:通过定义物体的受力和力矩,可以建立动力学模型。
这些力可以包括重力、摩擦力、弹簧力等,可以根据需要进行自定义。
-运动学分析:可以分析物体的位置、速度、加速度以及各个连接件之间的相对运动关系。
2. 实例解析:
-车辆悬挂系统:通过建立车辆悬挂系统的多体动力学模型,可以分析车轮与地面的接触力、悬挂系统的行程和动态响应等。
这有助于改善车辆的悬挂性能和乘坐舒适性。
-机械臂运动学和动力学分析:通过建立机械臂的多体动力学模型,可以分析机械臂在不同工作状态下的位姿、速度和加速度。
这有助于优化机械臂的设计和运动控制算法。
-飞机起落架系统:通过建立飞机起落架系统的多体动力学模型,
可以分析起落架在着陆和起飞时的动态响应和受力情况。
这有助于改进起落架的设计和耐久性。
-振动系统:通过建立振动系统的多体动力学模型,可以分析系统的固有频率、振动模态和受力情况。
这有助于评估结构的稳定性和设计适当的减振措施。
以上是MSC Adams多体动力学仿真的基础知识和一些实例解析。
通过使用MSC Adams,工程师和研究人员可以更好地理解和优化复杂机械系统的动力学特性。
ADAMS软件在工程机械系统仿真中的应用案例

无弹簧时
分析模型
座位上下运动曲线
理论计算简介 对于座位体,质量为M,整体力平衡式可写为:
MX CX KX MG F 0
解上述方程即可得到座位的运动,并加以绘 制曲线。
ADAMS软件分析过程简介
建立模型样机
第一步:可简化建立样机,座位为一长 方体,底盘也简化为一长方体。注意:简化 时要保证质心位置不变、质量不变。
第四步:修改个零部件的物理特性。视图在由 CAD软件调入ADAMS软件后,其各部件的物理 特性丢失,只保留了几何特性,所以,为进行 系统仿真,需要对每一个零部件添加材料特性, 步骤如下:
将鼠标放在要修改的零部件上,点击右键, 依次选择:浮动菜单的第一项part—modify, 打开修改对话框;
此处选择 质量特征
第五讲 ADAMS软件在工程机械 系统仿真中的应用
一、ADAMS应用总述 二、综合实例
刚体运动方程
rT
mr''
F
'T
J'
.
'
~
'
J''
n'
0
Hale Waihona Puke 点在参考坐标系中位置表示及位移、速度、加速 度表示
r r0 As
r' r0' As
r''
r0''
''
As
利用adams仿真软件对机械系统进行仿真过程:
建模
*利用Adams软件建模工具
系统几何建模
直接建立样机模型 *利用其它软件建立模型
后输入Adams软件
施加约束和运动 施加载荷
测量调试
61-基于adams的碰撞仿真剖析[优质文档]
![61-基于adams的碰撞仿真剖析[优质文档]](https://img.taocdn.com/s3/m/6418e958777f5acfa1c7aa00b52acfc789eb9f74.png)
式中: a = h1 − h0 ; ∆ = (x − x0 ) /(x1 − x0 ) 。
step
=
h0 hh10
+
a
⋅
∆2
(3
x < x1
x ≥ x1
(2)
式中采用了 step 函数,其形式为 step(x, x0, h0, x1, h1) ,按式(2)进行计算。
−
q)e
−
cmax
⋅ (dq
/
dt) ⋅
step(q, q0
−
d ,1, q0 ,0)
q > q0 q ≤ q0
(1)
在 ADAMS 中有两种定义碰撞力的方法:一种是补偿法(Restitution);另一种是冲击函 数法(Impact)。相对而言,前者的参数更难准确设置,所以更多是选用后者来计算碰撞力。 冲击函数法是根据 impact 函数来计算两个构件之间的碰撞力,碰撞力由两个部分组成:一个 是由于两个构件之间的相互切入而产生的弹性力;另一个是由于相对速度产生的阻尼力。 impact 函数的一般表达式为:
谢最伟 吴新跃
(海军工程大学 船舶与动力工程学院,湖北 武汉 430033)
基于 ADAMS 的碰撞仿真分析
第三届中国 CAE 工程分析技术年会论文集
348
υ1 、υ2 分别是两物体的泊松比, E1 、 E2 分别是两物体的弹性模量。
对于非旋转体的碰撞,刚度系数可采用 ADAMS 的官方推荐值,即默认值进行计算。
3、积分误差(Error)。积分误差决定了在求解动力学方程的过程中,某一步的预测值与 校正值之间所能接受的差值。积分误差过大,计算容易进行,但最终结果会产生过大误差; 积分误差过小,求解时间太长。一般来讲,积分误差设为 0.001 较为适宜。
用ADAMS进行凸轮机构模拟仿真示例

结果分析注意事项
确保模拟仿真的初始条件和参数设 置正确
注意模拟仿真的收敛性和稳定性
添加标题
添加标题
添加标题
添加标题
对比实际测试数据与模拟仿真结果, 确保一致性
考虑模拟仿真的误差和不确定性
THANK YOU
汇报人:XX
参数敏感性分析:研究模型参数对模拟仿真结果的影响,确定关键参数并分析其敏感性。
重复性验证:多次运行模拟仿真并分析结果的重复性,以评估模拟仿真的可靠性和稳定性。
模拟仿真结果优化分析
优化目标:提高凸轮机构的性能和效率
优化方法:采用多目标优化算法,对凸轮机构的关键参数进行优化 优化过程:通过ADAMS软件进行仿真实验,分析不同参数组合下的性能表 现 优化结果:得到最优参数组合,使凸轮机构性能达到最优状态
功能特点:ADAMS提供了丰富的建模工具和求解器,支持各种机械系统,包括刚体、柔性体和 刚柔耦合系统。
应用领域:广泛应用于汽车、航空航天、船舶、机械制造、能源等领域,用于产品设计和性能优 化。
优势:ADAMS提供了直观的图形界面和强大的后处理功能,使得用户可以方便地进行模型建立、 参数设置和结果分析。
对比分析不同 参数下的模拟 仿真结果,如 转速、压力角
等
输出凸轮机构 模拟仿真的最
优设计方案
总结输出凸轮 机构模拟仿真 结果对实际应 用的指导意义
用ADAMS进行凸轮机构模拟 仿真结果分析
模拟仿真结果准确性分析
对比实验:将模拟仿真结果与实际实验数据进行对比,验证模拟仿真的准确性。 误差分析:分析模拟仿真结果与实际实验数据之间的误差,判断误差是否在可接受范围内。
定义运动学参数和约束条件
设置凸轮机构运动参数
确定凸轮机构类型和尺寸 定义凸轮机构运动规律 设置凸轮机构接触参数 验证凸轮机构运动参数的正确性
ADAMS建模与仿真分析
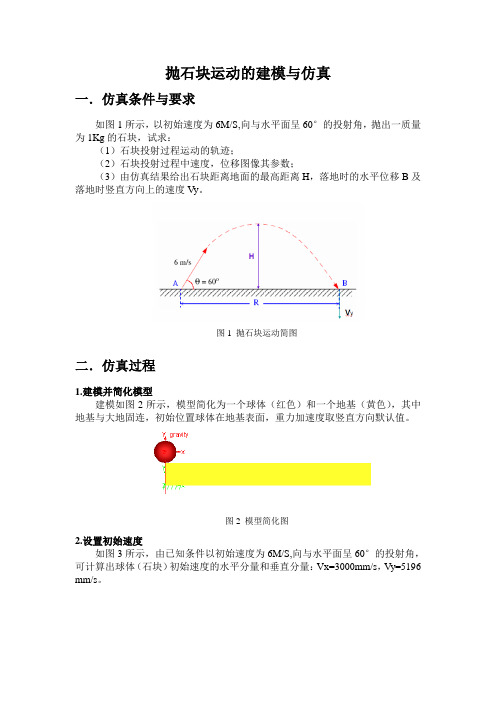
抛石块运动的建模与仿真一.仿真条件与要求如图1所示,以初始速度为6M/S,向与水平面呈60°的投射角,抛出一质量为1Kg的石块,试求:(1)石块投射过程运动的轨迹;(2)石块投射过程中速度,位移图像其参数;(3)由仿真结果给出石块距离地面的最高距离H,落地时的水平位移B及落地时竖直方向上的速度Vy。
图1 抛石块运动简图二.仿真过程1.建模并简化模型建模如图2所示,模型简化为一个球体(红色)和一个地基(黄色),其中地基与大地固连,初始位置球体在地基表面,重力加速度取竖直方向默认值。
图2 模型简化图2.设置初始速度如图3所示,由已知条件以初始速度为6M/S,向与水平面呈60°的投射角,可计算出球体(石块)初始速度的水平分量和垂直分量:Vx=3000mm/s,Vy=5196 mm/s。
图3 初始速度设置3.定义石块质量如图4所示。
图4 定义质量4.建立测量图5 建立测量5.进行仿真设置End Time:1.5;Step Size:0.01,得到运动轨迹如图6所示,由轨迹可知石块运动轨迹为一条抛物线,有石块轮廓密度可见石块运动速度由大变小再变大。
图6 运动轨迹5.数据数据与图表处理表1为石块运动过程中的在X及Y方向上的位移速度部分测量参数表,有表一可看出石块初始速度为Vx=3000mm/;Vy=5196mm/s;在t=0.54s时石块运动大约至竖直位移最高处,此时竖直位移约为1376mm,其在竖直方向上的速度分量约为100mm/s,接近零速度,若提高仿真精度可看到当石块运动至最高点时对应的竖直方向的速度分量几乎为零;图7为速度位移测量曲线,与表一一一对应;图8为按t=0.54s确定石块距离地面的最高距离H对应标记点及此时的数字标签;图9为按仿真动画单步逼近播放获得的石块返回地面瞬间的状态及其时对应的时间;图10 石块返回地面时对应标记点及此时的数字标签;图11 石块返回地面时竖直方向速度时对应标记点及其数字标签。
ADAMS操作与实例解析
ADAMS操作与实例解析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的机械系统动力学仿真与分析软件,可以用于模拟和优化各种机械系统,包括汽车、飞机、船舶、机械臂等。
在这篇文章中,将介绍ADAMS的操作流程以及一些实例解析。
1.建模:ADAMS提供了丰富的建模工具,可以通过创建零件模型来构建机械系统的模型。
用户可以直接导入CAD文件或者通过ADAMS的建模工具手动创建零件模型。
在建模过程中,用户需要定义每个零件的几何特征和物理性质。
2.装配:在建模完成后,需要对所有的零件进行装配操作。
用户可以使用简单的拖拽操作将零件放置到正确的位置,并设置它们之间的连接关系。
ADAMS提供了多种连接方式,包括球接头、铰接、滑动接头等。
3.定义运动:一旦完成了装配操作,用户需要为机械系统定义运动。
ADAMS支持多种运动方式,包括平移、旋转、摆动等。
用户可以通过设置零件的运动公式或者直接拖动零件使其运动。
4.分析:定义了机械系统的运动后,可以进行多种分析,如运动模拟、动力学分析、碰撞检测等。
ADAMS提供了丰富的分析工具和图表,可以帮助用户研究机械系统的性能和优化设计。
接下来,将通过两个实例来解析ADAMS的应用。
实例一:汽车悬挂系统分析假设我们要分析一种新型的汽车悬挂系统的性能。
首先,我们需要在ADAMS中建立一个悬挂系统的模型,包括车轮、悬挂臂、弹簧等零件。
然后,通过调整零件的连接关系和运动方式,定义悬挂系统的运动。
接着,我们可以进行动力学分析,如行驶过程中的减震性能测试、路面不平度下的车辆响应等。
通过观察ADAMS提供的图表和动画,我们可以评估悬挂系统的性能,并优化设计。
实例二:机器人臂运动规划假设我们要设计一个机械臂,能够完成复杂的运动任务,如抓取物体、放置物体等。
首先,我们需要建立机械臂的模型,包括关节、链接件等零件,并设置它们之间的运动关系。
ADAMS分析实例-经典超值

ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1 在ADAMS/View 零件库中选择圆柱体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (10025042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框图3-1设置圆柱体选项3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAMS大作业
姓名:柴猛
学号:20107064
目录
绪论 (1)
模型机构 (2)
模型建立 (3)
约束添
加 (9)
运动添加 (11)
模型仿真 (14)
小结 (17)
参考文献 (17)
绪论
大型旋挖钻机是我国近年来引进、发展的桩工机械, 逐步取代了对环境污染严重、效率低下的其它建筑工程桩孔施工机械。
旋挖钻机的钻桅变幅机构对整机布局和操纵稳定性影响很大, 它是实现钻孔位置变化及改变钻桅位置状态的关键部件。
钻桅是旋挖钻机主执行机构的重要支撑, 其为钻具、调整机构、加压系统等提供结构支撑, 整个桅杆对于保证整机的正常运行和工作质量起着至关重要的作用。
旋挖钻机主要是运用于灌注桩施工,功能为钻孔。
而在当今灌注桩施工中旋挖钻机具有优于其它方式的优点:
1.钻井效率高;
2.成孔质量好;
3.环境污染小。
本文主要是对旋挖钻机的钻桅举升装置进行运动仿真分析。
模型机构
钻桅举升装置主要由钻头,钻杆,变幅机构,桅杆以及油缸组成,
工作过程:对孔,下钻,钻进,提钻,回转,卸土六个主要步骤。
对孔:为了保证钻桅的垂直度,采用了平行四边形平动机构,并结合液压杆及回转机构完成孔的定位;
下钻:由于钻具质量大,应控制其下降速度,将钢丝绳与钻杆通过回转接头连接,采用卷扬提升系统控制钻具的升降;钻进:通过动力头驱动扭矩并传递给钻杆,再由钻杆传递给钻钭以实现钻进;提钻:与下钻具有相同的控制系统和运动过程;
回转:由回转机构完成;卸土:通过卷扬系统和连杆的旋转来完成。
模型建立
把实际模型按比例缩
小
一.底座
因为底座不参与运动分析,所以可以用方块代替底座:
(1)启动ADAM,S 设置相关参数,如下:2)建立底座:
对其进行位置变换:
3)建立三角架:
4)建立动臂,连杆:
5)建立上三角
6)
建立钻
7) 建立动臂油
在动臂上创建一个marker 点:
8)创建钻桅油
缸:
在钻桅上创建一个marker 点:
创建油缸,用两个圆柱代替:
工作装置中,钻具是当钻桅运动到竖直位置时再装上的,这里直接与钻杆连在起。
9)建立钻杆架:
(10)建立钻杆:
在每个钻杆架上打个通孔:
创建钻杆:
创建钻
11)整体模型
3)添加油缸滑动约束:
4)添加钻杆,钻杆架等约
束:
钻杆架与钻桅固定:
5)添加钻具与钻杆间约束:
运动添加
.动臂油缸运动添加如下
(1)
对motion 1 进行修改:
2) 3)
3)
4)
4)
二.钻杆油缸运动添加
(1)
对 motion 2 进行修改:
2)
.钻杆运动添加
钻杆与两个钻杆架之间的运动形式一样,这里以一个钻杆架为例:
(1)
对motion 3 进行修改,如下:
(2)
3)
.设置运动环境
三.参数测量
钻桅质心位置:模型仿真
.仿真
速度参数:
钻具参数测量:整体图:
小结
通过利用ADAMS对旋转机的虚拟建模以及仿真分析,我们可以对选钻机的工作情况有一个较为真实的了解,对我们以后设计选钻机有很大的帮助,可以大幅度上减少我们的作业时间,极大地提高了我们的工作效率,而且很大程度上减少了设计错误。
ADAMS是一款虚拟仿真软件,一直受到各行各业的广泛青睐,对设计及分析有很大帮助,是工程上不可缺少的一款软件,而且在市场上,一直备受欢迎。
ADAMS 本身也在随着社会科技的发展不断更新,不断地为社会服务。
作为一名当代大学生,我们不仅要学好专业知识,还要全面提高自身科学素质,培养创新理念,能够运用所学知识进行创新设计和分析,在这些过程中,虚拟仿真技术扮演着重要角色。
参考文献
1】《虚拟样机技术与ADAMS应用实例教程》北京航空航天大学出版社2】《MD ADAM虚S 拟样机从入门到精通》机械工业出版社。