微机械陀螺仪报告
2024-微机械陀螺简述,微惯性技术

LOGO
1.2 微机械陀螺特点
MEMS陀螺仪是利用 coriolis 定理,将旋转物体的角速度转换成 和角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技 术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是
振动平板结构 振动梁结构 振动音叉结构 加速度计振动结构
振动平板结构 振动梁结构 振动音叉结构
按加工方式
体微机械加工 表征微机械加工 LIGA(光刻、电铸和注塑)
LOGO
1.3 微机械陀螺分类
按驱动方式
压电式 静电式 电磁式
微
机
按检测方式
压电检测 电容检测
械 陀
压阻式检测
螺
光学检测
分
隧道效应检测
类 闭环模式
4. 测量范围大,一些MEMS 陀螺仪测量范围可高达数千°/s
缺点: 目前,各种微机械陀螺的角速度测量精度相对较低,
漂移较大。
LOGO
1.3 微机械陀螺分类
按振动结构
微
机
械
陀
螺
分
按材料
类
旋转振动结构 线性振动结构
硅材料 非硅材料
振动盘结构陀螺 旋转盘结构陀螺
正交线振动结构 非正交线振动结构
单晶硅 多晶硅 石英 其它
速率陀螺
按工作模式
开环模式
速率积分陀螺
整角模式
LOGO
2、微机械陀螺根本原理
振动式微机械陀螺根本原理 柯氏加速度及柯氏力
LOGO
2.1 振动式微机械陀螺根本原理
《传感器实验指导》陀螺仪及加速度计特性及应用实验
《传感器实验指导》陀螺仪及加速度计特性及应用实验1.了解陀螺仪及加速度计的工作原理;2.掌握陀螺仪及加速度计的测量方法;3.掌握陀螺仪及加速度计的电路组成及原理。
1.分析陀螺仪及加速度计测量电路的原理;2.连接陀螺仪及加速度计物理信号到电信号的转换电路;3.软件观测传感器姿态变化时输出信号的变化情况;4.记录实验波形数据并进行分析。
1.开放式传感器电路实验主板;2.陀螺仪及加速度计测量模块;3.导线若干。
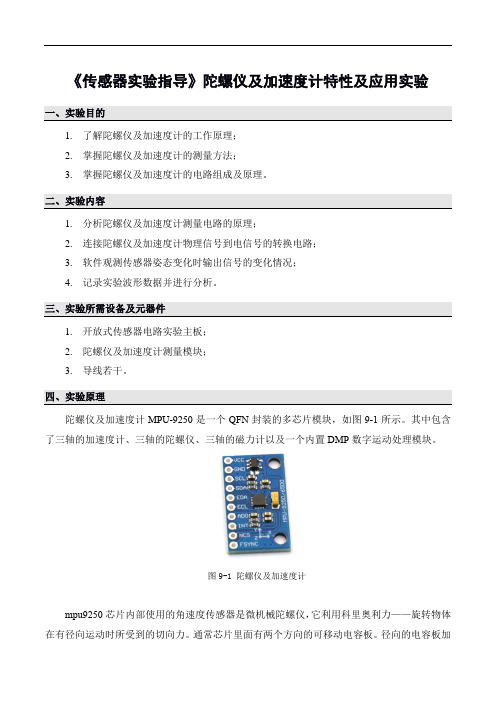
陀螺仪及加速度计MPU-9250是一个QFN封装的多芯片模块,如图9-1所示。
其中包含了三轴的加速度计、三轴的陀螺仪、三轴的磁力计以及一个内置DMP数字运动处理模块。
图9-1 陀螺仪及加速度计mpu9250芯片内部使用的角速度传感器是微机械陀螺仪,它利用科里奥利力——旋转物体在有径向运动时所受到的切向力。
通常芯片里面有两个方向的可移动电容板。
径向的电容板加震荡电压迫使物体作径向运动(有点像加速度计中的自测试模式),横向的电容板测量由于横向科里奥利运动带来的电容变化(就像加速度计测量加速度)。
因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度。
陀螺仪(Gyroscope、GYRO-Sensor)也叫地感器,传统结构是内部有个陀螺,如下图所示(三轴陀螺),三轴陀螺仪的工作原理是通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。
三轴陀螺仪可以同时测定上、下、左、右、前、后等6个方向(合成方向同样可分解为三轴坐标),最终可判断出设备的移动轨迹和加速度。
也就是说陀螺仪通过测量自身的旋转状态,判断出设备当前运动状态,是向前、向后、向上、向下、向左还是向右呢,是加速(角速度)还是减速(角速度)呢,都可以实现,但是要判断出设备的方位(东西南北),陀螺仪就没有办法。
图9-2 传统结构陀螺仪加速度计(Accelerometer、G-Sensor)也叫重力感应器,实际上是可以感知任意方向上的加速度(重力加速度则只是地表垂直方向加速度),加速计通过测量组件在某个轴向的受力情况来得到结果,表现形式为轴向的加速度大小和方向(XYZ),这一点又有点类似于陀螺仪,但陀螺仪的更多关注自身旋转情况(原位运动),加速计则主要是测量设备的受力情况,也就是三轴运动情况,尽管加速计也可能在某个小范围换算出角速度的可能,但设计原理决定更适合于空间运动判断。
微机械陀螺仪温度特性及补偿算法研究

微机械陀螺仪温度特性及补偿算法研究陈 怀,张 嵘,周 斌,陈志勇(清华大学精密仪器与机械学系,北京100084)摘 要:微机械陀螺是近代发展起来的一种角速率传感器,与传统陀螺仪相比,它具有体积小、重量轻、价格便宜等特点,但其性能受环境温度的改变影响很大。
通过分析温度变化对微机械陀螺仪的影响,推导出陀螺输出、驱动轴相位与温度的关系,提出了一种无温度传感器的新型补偿算法,经温度实验补偿后的陀螺温度漂移减小到补偿前的5%,为微机械陀螺的性能改善提供了一种新的途径。
关键词:微机械陀螺仪;温度特性;补偿中图分类号:TH7;V241.5 文献标识码:A 文章编号:1000-9787(2004)10-0024-03 Research on thermal characteristic and compensation algorithmfor MEMS-gyroscopeC HEN Huai,ZHANG Rong,ZHOU Bin,C HEN Zh-i yong(Dept of Precision Instr&Mechanology,Tsinghua University,Beijing100084,C hina)Abstract:ME MS-gyroscope is a kind of angular-rate-sensor developed in recent years,which has smaller size,lighter wei ght and lower cost than traditional rate-sensor.But temperature changing largely influences the performance of ME MS-gyroscope.The influence by temperature changing is analyzed.Relation among zero-rate-output,phase of drive-axis and temperature is derived.Therefore,a novel compensation algori th m wi thout temperature-sensor is presented.The thermal bias drift of the gyroscope compensated by temperature-experiment is reduced to5%of the value before compensation.The resul ts show a new method to improve the performance of MEMS-gyroscope.Key words:MEMS-gyroscope;thermal characteristic;compensation0 引 言近年来,微机械陀螺得到了很大的发展,出现了音叉式、线振动式、振动轮式等多种结构型式,并在越来越多的领域获得了重要应用。
微机械振动式陀螺仪灵敏度分析
nvri ie st y,2 02. 0
0 } 9 m ・f c
(0 1 l) u
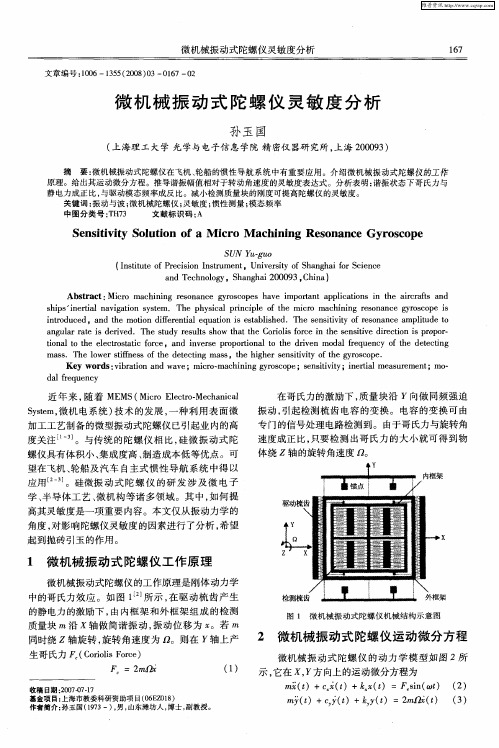
图 2 微 机械振 动式陀螺仪动力学模型
可见 , 陀螺 仪 的灵 敏 度 与驱 动 电压 成正 比。 与
检测 质量块 的支撑 刚度 的 3 2方 成 反 比 , / 刚度 越 小
3 微 机 械 振 动 式 陀 螺 仪 灵敏 度 求解
微 机械振 动 陀螺仪 的灵 敏度 定义 为
数 , 为驱动 模 态 频 率 。" 物理 含 义 是 : 阶系 I T的 二
式陀螺仪的研制提供动力学参考。
参考 文献 :
[ ] 格 雷 戈 里 T A. 瓦 奇. 传 感 器 与 微 执行 器 全 书 1 . 科 微 [ . M] 北京 : 科学出版社 ,0 5 20 . [ ] 许宜 申, 2 王寿荣 , 盛平. 微机 械振动 陀螺 仪闭环 驱动 电
收稿 日期 :0 70 —7 2 0 - 1 7 基金项 目: 上海市教委科研资助项 目(6 Z 1 ) 0 E O 8 作者简介 : 孙玉 国(9 3一) 男 , 17 , 山东潍坊 人 , 博士 , 副教授。
2 微 机 械 振 动 式 陀螺 仪 运 动 微 分 方 程
微 机 械 振 动 式 陀 螺 仪 的 动 力 学 模 型如 图 2所 示 , 在 , 向上 的运 动微 分方 程为 它 y方
d l eu n y a q e c r f
近 年 来 , 着 ME 随 MS( coEet . caia Mi l r Mehnc r co l Ss m, 机 电系 统 ) 术 的发 展 , 种 利 用 表 面微 yt 微 e 技 一 加 工工 艺制 备 的微 型振 动式 陀 螺仪 已引起 业 内 的高 度关 注 ] 。与传 统 的 陀 螺 仪 相 比, 微 振 动 式 陀 硅 螺仪 具有 体 积小 、 成 度高 、 集 制造 成 本低 等 优点 。可 望在 飞机 、 船及 汽 车 自主式 惯 性 导 航 系 统 中得 以 轮 应用 J 。硅微 振 动 式 陀 螺 仪 的研 发 涉 及 微 电 子 学 、 导 体工 艺 、 机 构等 诸 多领 域 。其 中 , 何 提 半 微 如
陀螺仪实验报告

university of science and technology of china 96 jinzhai road, hefei anhui 230026,the people’s republic of china陀螺仪实验实验报告李方勇 pb05210284 sist-05010 周五下午第29组2号2006.10.22 实验题目陀螺仪实验(演示实验)实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度?为:?=d?r/dt=m/ip (1) 式中?r为陀螺仪盘的角速度,ip为陀螺仪盘的转动惯量。
m=f.r为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:f=m(g-a) (2) 式中g为重力加速度,a为轨道加速度(或线加速度)轨道加速度与角加速度的关系为:a=2h/tf2; ?=a/r (3) 式中h为砝码下降的高度,r如图1所示为转轴的半径,tf为下落的时间。
将(2)(3)代入(1)2ip?2mr2t?h2mgr可得: (4)2f测量多组tf和h的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物w使陀螺仪ab轴(x轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕x轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量l:l=ip.?r (5) 当在陀螺仪的另一端挂上砝码m(50g)时就会产生一个附加的力矩m*,这将使原来的角动量发生改变:dl/dt=m*=m*gr* (6) 由于附加的力矩m*的方向垂直于原来的角动量的方向,将使角动量l变化dl,由图1可见: dl=ld?这时陀螺仪不会倾倒,在附加的力矩m*的作用下将会发生进动。
谐振式陀螺仪研究报告

DETF模态分析
目的 • 主要关心的是驱动模态,要让它成为主要模态,同时要防 止有其它模态的固有频率为驱动模态固有频率的2倍,避免 和检测信号混淆,或引起不必要的其它模态运动。
DETF谐响应分析
结论: • 最大位移响应出现在外加驱动频率等于DETF驱动模态固有 频率处,中心点最大位移幅度值为:5.63um。
陀螺仪质量块有限元模型
三项措施: 1.将敏感质量做成回字型, 在 有限的制版面积内实现了较大敏感 质量; 2.用杠杆放大机构, 把科氏力 放大后作用于DETF一端; 3.用了双DETF实现了差动测 量,总频率差为单DETF测量的两倍。
陀螺质量块模态分析
主要目标: 陀螺的驱动模态的固有振动频 率必须在我们期望的范围内,这个 期望的频率范围是根据目前可能采 用检测的手段、用DETF可以测量 的要求来确定的 通过结构设计,使驱动模态成 为陀螺的第一模态,且避免有驱动 模态与检测模态的倍频的模态出现
驱动信号的检测
硅微机械谐振式陀螺是一个微机电系统,微机械的振 动系统与驱动、检测振动系统输出信号的电路构成一个整 体。 梳齿驱动器的振动情况可以通过检测静齿电容的变化, 得到为测试陀螺的性能,设计开环驱动测试方案,目的是 分别测量陀螺质量块和各个DETF的驱动特性曲线,测量施 加的直流偏置电压以及交流驱动电压对陀螺输出响应的影 响。
陀螺质量块的谐响应分析
陀螺质量块的分析,就是在模态分析的基础上,采用 振型叠加法来仿真在驱动模态时陀螺质量块上各点的实际 响应值,从而对结构的设计进行验证和优化。步骤如下: • 1)首先建立有限元等效模型。 • 2)进行模态分析,求出所需驱动模态的固有频率. • 3)在陀螺内框驱动齿上施加驱动载荷。
日本研究现状
• 其主要的研究机构有东京大学尖端技术室和日立、住友电 工、三菱、日本航空电子工业 (JAE)等公司。其最重要的 贡献在于简化了干涉型光纤陀螺的系统配置 ,大大地降低 了系统成本 ,使光纤陀螺的民用范围得到很大的扩展 ,例 如:用于汽车导航系统、 清洁机器人、光罗盘、农用直升 机姿态控制系统等。
陀螺仪实验报告
university of science and technology of china 96 jinzhai road, hefei anhui 230026,the people's republic of china陀螺仪实验实验报告李方勇 pb05210284 sist-05010 周五下午第29组2号2006.10.22 实验题目陀螺仪实验(演示实验)实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度?为:?=d?r/dt=m/ip (1) 式中?r为陀螺仪盘的角速度,ip为陀螺仪盘的转动惯量。
m=f.r为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:f=m(g-a) (2) 式中g为重力加速度,a为轨道加速度(或线加速度)轨道加速度与角加速度的关系为:a=2h/tf2; ?=a/r (3) 式中h为砝码下降的高度,r如图1所示为转轴的半径,tf为下落的时间。
将(2)(3)代入(1)2ip?2mr2t?h2mgr可得: (4)2f测量多组tf和h的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物w使陀螺仪ab轴(x轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕x轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量l:l=ip.?r (5) 当在陀螺仪的另一端挂上砝码m(50g)时就会产生一个附加的力矩m*,这将使原来的角动量发生改变:dl/dt=m*=m*gr* (6) 由于附加的力矩m*的方向垂直于原来的角动量的方向,将使角动量l变化dl,由图1可见: dl=ld?这时陀螺仪不会倾倒,在附加的力矩m*的作用下将会发生进动。
微机械陀螺仪的研制现状_谷庆红
第11卷第5期中国惯性技术学报 2003年10月・综述与评论・文章编号:1005-6734(2003)05-0067-06微机械陀螺仪的研制现状谷庆红 (江南航天集团3405厂,贵州 遵义 563124) 摘要:介绍了当前国内外微机械陀螺仪的研制现状,阐述了微机械陀螺仪的两种典型结构,指出了微机械陀螺仪的发展方向。
微机械陀螺仪正朝着小型化和低成本方向发展,将会在集成式导航系统和运动控制系统中大量使用。
关 键 词:微机械陀螺仪;研制现状;综述;振动陀螺仪;音叉调谐微机械陀螺仪 中图分类号:U666.12 文献标识码:ACurrent State of MEMS Gyro ResearchGU Qing-hong(3405 Plant, Jiangnan Aerospace Group, Zunyi 563124, China)Abstract: This paper summarizes the current state of MEMS gyro research, describes two kinds of MEMS gyro’s typical structure up to date, and points out the developing trend of MEMS gyro.MEMS gyro is developing in the direction of miniature and low cost and largely applied to integrated navigation system and motion control system.Key words: MEMS gyro; current state of research; summary; vibratory gyro; tuned fork MEMS gyro1 引 言 导弹的射击精度由惯导系统(INS)的精度来决定,而惯导系统的精度、成本主要决定于惯性仪表(陀螺仪和加速度计)的精度和成本,尤其是陀螺仪的漂移对惯导系统位置误差增长的影响是时间的三次方函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微机电系统设计学读书报告--浅谈微机械陀螺仪0 引言陀螺仪是一种能够敏感载体角度或角速度的惯性器件,在姿态控制和导航定位等领域有着非常重要的作用。
传统的机械陀螺仪由于体积大、成本高、不适合批量生产等因素制约了其在很多方面的应用。
在科技发展的推动以及市场需求的牵引下,陀螺仪正朝着高精度、高可靠性、微型化、多轴测量和多功能测量的方向发展。
随着MEMS技术的发展,MEMS微细加工工艺在惯性器件制作中的应用大大减小了陀螺仪的尺寸,降低了生产成本,使其能够在汽车、工业自动化、消费电子等领域得到更广泛的应用。
陀螺仪的发展大致经历了下列几个过程:从20世纪50年代的液浮陀螺仪到70年代的动力调谐陀螺仪(又称挠性陀螺仪,DTG),从20世纪80年代的环形激光陀螺仪(RLG)、光纤陀螺仪(FOG)到90年代的振动陀螺仪以及目前研究报导较多的微机械电子系统陀螺仪(简称微机械陀螺仪,MEMSG)[1]。
微机械陀螺仪在军事领域方面的应用尤为重要,如Honeywell最近研究出的GG5300三轴微机械陀螺封装件高度3.3厘米,直径5.0厘米,专为导引头瞄准线稳定、飞行控制、炮塔稳定而设计,已经成功应用于全球鹰无人机上。
微机械陀螺仪属于微电子机械范畴,按材料分可分为硅微陀螺、石英微陀螺、压电陶瓷微陀螺等。
石英材料结构的品质因数Q值很高,陀螺仪特性最好,且有实用价值,是最早商品化的;硅材料结构完整,弹性好,比较容易得到高Q值的硅微机械结构,随着深反应刻蚀技术(DRIE)的出现,体硅微机械加工技术的加工精度显著提高,因此两种材料的微机械陀螺在市场上都有着广泛的应用。
1 微机械陀螺仪硅微机械陀螺仪的结构常采用振梁结构、双框架结构、平面对称结构、横向音叉结构、梳状音叉结构、梁岛结构等。
目前世界上研究的石英微机械陀螺按照结构大致可以分为:单端音叉石英微陀螺、双端音叉石英微陀螺、双端固定石英音叉微陀螺、双“T”型石英微陀螺、双锤头型石英微陀螺和三角型石英微陀螺等。
用来产生参考振动的驱动方式有静电驱动、压电驱动和电磁驱动等,而检测由科氏力带来的附加振动的检测方式有电容检测、压电检测、压阻检测等。
光学检测也可用,但由于成本太高,因而没有太大的适用价值。
微机械陀螺仪根据驱动与检测方式分为四种:① 静电驱动,电容检测;② 电磁驱动,电容检测;③ 电磁驱动,压阻检测;④ 压电驱动,电容检测。
其中静电驱动、电容检测的陀螺仪设计最为常见,并已有部分产品已研制成功。
传统的陀螺仪是利用高速转动的物体具有保持其角动量的特性来测量角速度,通过被激励的振动体对哥氏加速度的敏感来测量角速度。
1988 年,美国德雷伯实验室研制出第一台框架式角振动微机电陀螺仪,1993 年又研制出性能更好的音叉式线振动陀螺仪。
影响其应用的主要问题是精度限制,提高精度的手段主要是改进微细加工工艺和误差分离/补偿技术。
目前实现的工程化的MESM 陀螺仪精度在国外已达到1(°)/h 以内[2]。
分析和评价陀螺的性能,需要制定一系列的衡量准则,为其应用提供一定的参考依据。
总体而言,表征陀螺性能的主要指标有: 标度因数稳定性、漂移稳定性、随机游走、量程和成本等等。
依据上述指标将陀螺划分为 4 类: 战略级、惯导级、战术级、商业级[3],如表1。
表1 陀螺性能指标的划分就目前已研制成功的微机械陀螺仪来说,其结构有以下两种:① 音叉式结构,它利用线振动来产生陀螺效应;② 双框架结构,它利用角振动来产生陀螺效应。
双框架角振动微机械陀螺仪研制较早,虽制作工艺简单,但音叉式线振动微机械陀螺仪的灵敏度优于双框架角振动微机械陀螺仪。
图1为调谐音叉式微机械陀螺( TFG) 的工作原理图。
如图所示,在绕与质量块速度矢量垂直的输入输出轴上施加角速率将引起哥氏力,它推动质量块进入和跳出振荡平面。
由于相关质量块的瞬时速度矢量大小相等、方向相反,将引起反平行移动以响应哥氏力。
最终的运动由两个质量块的上下电容板测量,给出的信号与施加的输入速率成比例。
图1 TFG陀螺的工作原理图2 国内外微机械陀螺仪的发展现状20世纪60年代,GE利用压电石英晶体换能器制造出一个金属振动梁结构的陀螺,随后美国沃尔森公司推出利用石英晶体作为振动体,金属电极激励和检测的石英陀螺,但是当时工艺条件还较为落后,石英陀螺的尺寸还是比较大。
后来美国Draper(德雷珀)实验室、美国LITTON(利顿)公司、美国BEI(贝)公司、美国HONEYWELL(霍尼韦尔)公司等推出双端石英音叉陀螺,掀起了微机械陀螺仪的研究热潮,将微机械陀螺由实验室的研究推向大规模的实用化和商业化。
图2为微机械陀螺实物图。
BEI公司QRS11 BAE公司SiIMU04 BAE公司SiVSG Honeywell公司GG5200图 2 微机械陀螺实物图目前,国外主要有美国、日本、瑞典、法国等国家在开展微机械陀螺的研究,其中,美国、日本的研制水平最高,微机械陀螺的工艺比较成熟,结构也比较多样,尺寸较小,目前已经广泛在汽车安全气囊、手机等电子设备、飞机辅助导航、机器人、医学手术等民用领域和超音速战机、巡航导弹、无人侦察机等军事领域进入实用化、产品化阶段。
我国关于微机械陀螺的研究始于20世纪80年代后期,目前从事微机械陀螺研究的主要有清华大学、国防科技大学、航天科技集团704所等,并且国防科工委从1995年末开始便投入6000万以上的经费用于惯性器件的基础性研究,并且微机械陀螺技术已经纳入863计划之中。
尽管国内对微机械陀螺技术的研究有一定进步,但不可否认的是在微机械陀螺的工艺、尺寸、精度和稳定性方面,同国外已经商业化的陀螺产品相比还有一定的差距。
3微机械陀螺的应用3.1惯性平台陀螺技术的发展促进了惯性平台的发展,惯性稳定平台由于能够隔离载体( 导弹、飞机、战车及舰船)的运动干扰,不断调整平台的姿态和位置的变化,精确保持动态姿态基准。
利用陀螺仪使平台保持稳定,不管导弹飞行时姿态发生多大变化,平台相对于惯性参考坐标系的方向始终保持不变,因而可以简化导航计算,洲际弹道导弹、潜地弹道导弹、远程巡航导弹和大型运载火箭基本上都采用平台式惯性制导,陀螺用于测量敏感平台相对于惯性空间的角速率,稳定平台根据陀螺测得的惯性角速率,输出一个反向作用力以抵消载体运动的影响,从而保持平台的姿态稳定,在平台稳定的情况下,载体才能高效、精确、稳定地完成相应的工作和任务,因此,陀螺的性能对于惯性平台有重要意义。
由于技术、精度以及出口限制,微机械陀螺在国内应用相对较少,但在国外高精度微机械陀螺已经广泛应用到了军事领域。
1)美国BEI公司SystemDonner惯性公司研制出的GyroChip TM系列微机械陀螺,如Horizon、QRS11、QRS116、SDD3000,是一类高性能的固态石英音叉型振动陀螺。
QRS116已经应用到捕食者无人机上,而SDD3000则已应用作全球鹰无人机的稳定平台中,其中SDD3000的性能参数如表2所示。
表2 BEI公司SDD3000的系统特性2)美国霍尼韦尔公司研制的新型两轴微机械陀螺GG5200和三轴微机械陀螺GG5300,专为导引头瞄准线稳定、天线指向稳定、炮塔稳定和飞行控制而设计。
目前,GG5200 已替代传统的机械陀螺应用到Stryker 装甲车的炮塔稳定平台中,而三轴微机械陀螺GG5300采取了最先进的硅微电系统加工技术,使其具备比GG5200更高的稳定性和精度,被应用于美国M1主战坦克上[4]。
图3列出了微机械陀螺在武器装备上作为惯性平台的具体应用。
a) GG5200和Stryker装甲车 b)GG5300和M1主战坦克图3 霍尼韦尔公司微机械陀螺仪惯性平台3.2姿态平衡飞机上有陀螺仪,其安装在飞机驾驶舱的仪表盘上。
陀螺仪在飞行时起的主要作用并不是稳定飞机,而是指示飞机飞行姿态,也叫姿态仪,告诉你飞机仰角,俯角,倾角(飞机空中转向时两翼与水平面的夹角)。
由于陀螺仪在工作状态下,保持绝对姿态,所以可以指示飞机飞行时姿态,以保证飞行员掌握以及控制飞机的飞行姿态,保证飞机安全,正常飞行。
美国BEI公司QRS116成功用于F-22上,用作姿态平衡保持,而SDD3000则已应用作全球鹰无人机的稳定平台上,确保无人机在复杂的环境中保持平衡[5]。
图4展示了飞行中保持平衡的战机。
a)F-22战机 b)全球鹰战机图4 微机械在姿态仪中的运用在航空航天领域、航海、水下作业以及各种导弹在飞行过程中,都需要姿态平衡,同时,在航空航天、导弹武器领域,对陀螺仪的精度、体积、重量都有严格的要求,人们在设计相关陀螺仪时,希望以更小的质量、更高的精度、更小的体积、更低的成本,而微机械陀螺仪使其成为现实。
3.3电子设备受制于成本和尺寸,一直以来微机械陀螺仪只在军用设备、飞机导航以及高档汽车等非价格敏感设备上使用,近年来,随着制造工艺的成熟,核心ASIC设计的改良以及封装技术的突破,价格和尺寸不断下降,MEMS陀螺仪开始进驻消费电子市场,逐渐在玩具,数码相机(防震防抖)上使用。
而2010年苹果在iphone4上率先采用了MEMS陀螺仪,标志着MEMS陀螺仪正式进入了手机这一全球最大消费应用市场。
如果将MEMS陀螺仪与加速度计整合在一起,则能更完整的传感出物体的运动状态。
目前手机用微机械陀螺仪的价格还是偏高,只能在少数高端手机上应用。
而微机械陀螺仪配合其它MEMS传感器以及其它模拟器件,能够实现的功能可谓是千变万化,应用相当广泛,给使用者以逼真的体验,而陀螺仪应用于数码相机、数码摄像机中,则可以实现防抖功能,使拍摄的照片、录像更加清晰、真实。
如图5所示,苹果手机、摄像机中运用陀螺仪。
a)苹果4S手机 b)摄像机图5 微机械陀螺仪在电子设备上中的运用4微机械陀螺的优势微机械陀螺技术发展迅速,特点突出,应用前景良好,主要体现在以下几个方面[6]:1) 体积越来越小,精度越来越高,设计方案呈多样化。
陀螺先后经历振动框架式、谐振音叉式、振动轮式、振环陀螺、四叶式等形式,陀螺漂移10 (°)/h。
硅微陀螺ADXRS系列产品尺寸为7mm×7mm×3mm,质量小于1g,技术方案的不断创新,从工作机理上减少了误差源,提高了精度。
2) 工艺和封装技术日趋成熟。
微机械陀螺加工工艺主要包括: 面加工技术,体加工技术,基于绝缘基体硅( Silicon on Insulator,SOI)工艺等等。
面加工技术主要是基片上淀积或生长多晶硅层来制造微机械结构。
体加工技术的基础是单晶硅刻蚀技术,中间层的硅微机械结构经过多次掩膜、双面光刻以及各向异性刻蚀而成,然后与上下层精密键合成一个整体。
SOI 工艺结合前两者的优势,它可以得到高质量的单晶硅独立结构,同时保留面加工,具有尺寸小、与IC 工艺兼容、价格低的批量生产优点。