DJI 大疆悟空说明书
DJI RONIN 3D Focus System用户指南说明书
DJI RONIN3D Focus System User Guide使用说明使用說明ユーザーガイド사용자 가이드BedienungsanleitungGuía del usuarioGuide de l'utilisateurGuida all’usoGebruiksaanwijzingManual do utilizadorGuia do usuárioРуководство пользователяv1.02020.10A. ArrayB.2ENDisclaimer and WarningCongratulations on purchasing your new DJI OSMO product. Please read thisentire document and all safe and lawful practices DJI OSMO provided carefullybefore use. Failure to read and follow instructions and warnings may result in seriousinjury to yourself or others, damage to your DJI OSMO product, or damage to otherobjects in the vicinity. By using this product, you hereby signify that you have readthis document carefully and that you understand and agree to abide by all terms andconditions of this document and all relevant documents of this product. You agreeto use this product only for purposes that are proper. You agree that you are solelyresponsible for your own conduct while using this product, and for any consequencesthereof. DJI OSMO accepts no liability for damage, injury or any legal responsibilityincurred directly or indirectly from the use of this product.RONIN is a trademark of SZ DJI OSMO TECHNOLOGY CO., LTD. (abbreviated as“DJI OSMO”) and its affiliated companies. Names of products, brands, etc., appearingin this document are trademarks or registered trademarks of their respective ownercompanies. This product and document are copyrighted by DJI OSMO with all rightsreserved. No part of this product or document shall be reproduced in any form withoutthe prior written consent or authorization of DJI OSMO.This document and all other collateral documents are subject to change at the solediscretion of DJI OSMO. For up to date product information, visit and click on the product page for this product.This document is available in various languages. In the event of divergence amongdifferent versions, the English version shall prevail.IntroductionThe DJI RONIN 3D Focus System can be installed onto the camera or cameracage to assist manual lens focus. The 3D Focus System can only be used to focuson subjects in the center of the camera view. It is not recommended to set the focallength of the lens to longer than 85 mm when using the 3D Focus System.3Overview1. Status Indicator2. AF/MF Switch Button3. USB-C Port4. 1/4”-20 Thread to Cold Shoe Adapter5. Thumb Screw6. Mounting Base7. Lock Wheel8. Infrared Distance Sensor (TOF)9. USB-C CableInstallation and ConnectionInstalling on Camera Cold Shoe (Figure A)1. Remove the 1/4”-20 thread to cold shoe adapter.2. Install the 3D Focus System on the cold shoe of the camera and rotate the lock wheel to fix firmly.3. Use two USB-C cables to connect the 3D Focus System to the USB-C port and focus motor of the gimbal.DO NOT directly insert third-party cables or devices into either USB-C portsof the 3D Focus System. Otherwise, the 3D Focus System or third-partydevices may be damaged by the power supply.Installing on Camera Cage (Figure B)1. Use a 1/4”-20 thread to cold shoe adapter to install the 3D Focus System onto the camera cage and rotate the thumb screw to fix firmly.2. Use two USB-C cables to connect the 3D Focus System to the USB-C port and focus motor of the gimbal.Using the 3D Focus SystemA focus motor is required in order to use the 3D Focus System.4CalibrationThe 3D Focus System must be calibrated before using for the first time. Follow the steps below to calibrate. A person or large object must be placed in the center of the camera view in order to calibrate.1. Power on the DJI RS 2 gimbal, swipe up on the touchscreen, tap Dial Functions, and Focus Motor.2. Return to the home screen, swipe left, tap Create, swipe up, and tap 3D Focus .3. Tap Lens Calibration. Perform Focus Motor Calibration by following the prompts and select the focal length.4. Focus the 3D Focus Sytem on a person or large object in the center of the camera view that is approx. 1 m away. Keep the camera stable and DO NOT move the gimbal until the progress bar is completely green. Adjust the front dial until the subject is in focus and tap Confirm.5. Repeat the previous step with a person or large object that is approx. 4 m away.The 3D Focus System must be recalibrated if the lens is replaced.It is recommended to focus on a person during calibration.5Lens ConfigurationLens configuration can be used to store up to three sets of calibrated lens parameters. Once stored, users can select parameters directly by tapping Lens Configuration.UsageIf the camera lens is replaced, the focus motor must be recalibrated the next time the 3D Focus System is powered on. To calibrate the focus motor, either double tap the AF/MF Switch button or follow the prompts to calibrate the focus motor after selecting the lens in Lens Configuration.To switch between AF and MF, press the AF/MF Switch button once or switch between AF and MF on the touchscreen. Once in AF, the 3D Focus System will be active and the status indicator turns solid green.DO NOT hot plug and unplug the 3D Focus System. Otherwise, theparameters will be lost and the focus motor will need to be calibrated again.Only manual focus lenses with a mechanical limit are supported.DO NOT use corrosive organic solvents such as alcohol to wipe the lens ofthe 3D Focus System.Make sure the infrared distance sensor (TOF) is not blocked by the hoodor filter of the camera. Otherwise, the auto focus of the 3D Focus will beinaccurate.Status Indicator DescriptionSpecifications6。
DJI 大疆悟空说明书
WooKong HELI用户手册V 1.8免责声明因使用本产品而造成的直接或间接损失与伤害,大疆创新概不负责。
本手册的阅读指南请严格遵守本手册要求将WooKong for Heli (WKH)安装到您的直升机,并安装WKH调参软件至您的电脑。
请注意手册中Lite 处所提醒的WKH和WKH Lite的区别。
DJI和WooKong为大疆创新所有的注册商标。
本文出现的产品名称、品牌等,均为其所属公司的商标或注册商标。
本产品及手册为大疆创新版权所有。
未经许可,不得以任何形式复制翻印。
使用本产品及手册不会追究专利责任。
文中图标解释:禁止参考页面配合遥控器调试需通过软件调试注意安装提示一般提示正确/ 错误目录本手册的阅读指南 (2)目录 (2)DJI WKH产品简介 (3)盒内物品清单 (4)初步安装连接 (5)A1准备工作 (5)A2安装到直升机上 (5)A3连线 (7)A4调参软件基本操作 (9)参数设置流程 (11)B1GPS与IMU安装 (11)B2控制模式切换开关 (12)B3无副翼 (13)B4十字盘 (14)B5总螺距与油门曲线设置 (14)B6锁尾 (14)B7发动机控制器 (16)B8遥控器校准 (17)B9系统检测 (18)B10自驾系统 (19)飞行 (20)C1数字指南针校准 (20)C2手动模式飞行测试 (20)C3失控保护 (21)C4自驾模式飞行测试 (22)产品维护 (24)固件升级 (24)产品信息 (24)附录 (25)WKH LED指示灯状态描述 (25)WKH Lite LED指示灯状态描述 (25)产品特性 (26)DJI WKH 产品简介WKH 是为专业象征机爱好者和玩家设计的飞控系统,他提供了自动平衡,定位,速度控制以及内嵌尾陀螺等功能。
无论是专业应用还是业余娱乐,它都能将用户从繁琐的操控压力中解放出来。
从小型电机到大型油机甚至涡喷直升机,WKH 自动驾驶系统均可适用。
DJI地面站4.01说明书
工具箱: 选择您想使用的工具。
帮助: 您可在此查看 DJI 地面站版本号。
5|
工具栏
主菜单下方的所有图标: 图标 描述 点击显示直升机轨迹。 在编辑任务时点击显示航线投影。 图标 前往您所输入的位置。 任务继续。如果您想从航点模式切换至自驾模式,点击暂 停后再点击继续,直升机会继续执行未完成的任务。 暂停任务。 描述
修订版本 1.1 日期:2011 年 7 月 1 日
– 第二部分
©2010-2011 深圳市大疆创新科技有限公司 版权所有
1|
版权
本产品及手册为深圳市大疆创新科技有限公司版权所有。未经许可,不得以任何形式复制翻印。 使用本产品及手册不会追究专利责任。 ©2010-2011 深圳市大疆创新科技有限公司 版权所有
安装 DJI 地面站软件
第1步: 第2步: 第3步: 第4步: 第5步:
请将 DJI 的 CD 产品插入您电脑的 CD-ROM 中,自动运行后会出现一个窗口。 使用地面站控制直升机之前,您需先正确配置 Ace Waypoint 自驾仪。 点击[Download DJI Ace Waypoint Assistant]安装 调参软件。 如果您已安装旧版本, 请先卸载。 详细设置请点击[Browse the CD], 并阅读 《Ace Waypoint 用户手册第一部分》 。 如果您还没有安装.Net Framework 3.5、DirectX 、IE 8 和 Google Earth™ Plug-In,请先分别点击它们的安装钮进行安装, 因为它们是 DJI 地面站软件所必需的软件。 点击[Install DJI Ground Station],按照安装向导安装地面站软件。 在您完成所有安装之后点击[Exit]。
DJI 2014年版快速使用指南说明书
GPS locked
Left stick / Up (Slowly)
Important:
1. Beginner flyers are recommended to only fly when the slow green flashes. 2. Rear LED Flight Indicators will go from slow yellow flashing to slow green flashing if more than 6 GPS
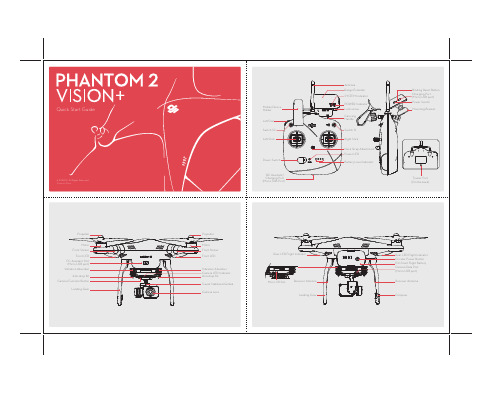
Binding Reset Button Charging Port (Micro-USB port) Power Switch Mounting Bracket
Trainer Port (On the back)
Propeller
Motor Front Sticker Front LED
Vibration Absorber Camera LED Indicator Anti-drop Kit 3-axial Stabilized Gimbal Camera Lens
Tutorials
Available on the iPhone
iOS 6.1~
Android 4.0~
Ensure the Smart Flight Battery, Range Extender and Remote Control are fully charged.**
Important: For SAFETY reasons please watch tutorials, read the disclaimer and manuals thoroughly before using this product.
大疆精灵3专业版使用说明
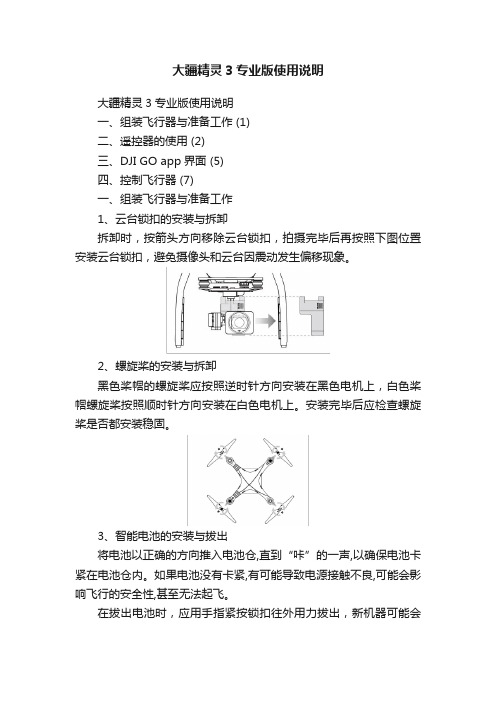
大疆精灵3专业版使用说明大疆精灵3专业版使用说明一、组装飞行器与准备工作 (1)二、遥控器的使用 (2)三、DJI GO app界面 (5)四、控制飞行器 (7)一、组装飞行器与准备工作1、云台锁扣的安装与拆卸拆卸时,按箭头方向移除云台锁扣,拍摄完毕后再按照下图位置安装云台锁扣,避免摄像头和云台因震动发生偏移现象。
2、螺旋桨的安装与拆卸黑色桨帽的螺旋桨应按照逆时针方向安装在黑色电机上,白色桨帽螺旋桨按照顺时针方向安装在白色电机上。
安装完毕后应检查螺旋桨是否都安装稳固。
3、智能电池的安装与拔出将电池以正确的方向推入电池仓,直到“咔”的一声,以确保电池卡紧在电池仓内。
如果电池没有卡紧,有可能导致电源接触不良,可能会影响飞行的安全性,甚至无法起飞。
在拔出电池时,应用手指紧按锁扣往外用力拔出,新机器可能会比较费力。
4、遥控器与移动设备的安装首先将遥控器的天线和移动设备支架展开,按下移动设备支架侧边的按键以伸展支架,放置移动设备后调整支架确保夹紧移动设备。
再使用USB数据线连接移动设备与遥控器后方的USB接口,打开DJI GO app。
二、遥控器的使用遥控器根据习惯方式分为美国手和日本手,可在DJI GO app内进行设置,大疆精灵3专业版的出场默认设置为美国手,也建议大家使用美国手。
1、开启与关闭短按一次电源按键可查看当前电量,若电量不足请给遥控器充电。
短按一次电源按键,然后长按电源按键2秒以开启遥控器。
遥控器提示音可提示遥控器状态。
遥控器状态指示灯绿灯常亮表示连接成功。
使用完毕后,与开启遥控器一样的操作方法关闭遥控器电源。
2、摇杆的使用遥控器上共有2个操控飞行器的摇杆,左手边的摇杆控制飞行器的上升与下降、顺时针与逆时针旋转。
右手边的摇杆控制飞行器的前后左右位置的移动。
左摇杆向上推:飞行器上升高度。
左摇杆向下推:飞行器下降高度。
左摇杆向左推:飞行器水平逆时针旋转。
左摇杆向右推:飞行器水平顺时针旋转。
右摇杆向上推:飞行器向前进方向前方移动。
DJI大疆创新Ronin-M用户手册
DJI 官方网站 有 Ronin-M 的专题网页,您可以通过该页面获取产品信息及用户 手册。请依据版本号确认是否为最新版本手册。如果不是,请下载并使用最新版本手册。本 手册如有更新,恕不另行通知。
这时请取下电池和充电器。
插座
8 © 2015 大疆创新 版权所有
DJI 智能电池使用方法
[3]
[1]
[2]
Ronin-M 用户手册
[1] 电池电量指示灯
[2] 电池电源按键(内含电源指示灯)
[3] 电池固定螺丝
安
(用于将电池固定到云台主体上)
装
查看电量:在电源关闭状态下,短按电源按键一次,可查看当前电量。 开启电源:在电源关闭状态下,长按电源按键 1 秒以上,即可开启电源。 关闭电源:在电源开启状态下,长按电源按键 1 秒以上,即可关闭电源。
Ronin-M/
认识 Ronin-M
[1]
[2] [3] [4]
[8] [9]
[13]
[16]
[14]
[5]
认
[6]
识
[7]
[10]
[11]
安
装
[12]
[17] [18]
[1] 水平杆及顶部把手 [2] 侧把手 [3] 快速拆装装置 [4] 平移轴电机 [5] 平移轴,机械平衡调整装置 [6] D-Bus 接收机端口 [7] USB & CAN 接口 [8] 绑定按键 [9] 云台 LED 指示灯 [10] 智能电池 [11] 横滚轴电机
大疆创新裁判系统用户手册说明书
2 © 2022 大疆创新 版权所有阅读提示符号说明 禁止 重要注意事项 操作、使用提示 词汇解释、参考信息前置参考阅读1. 《裁判系统用户手册》2. 裁判系统各模块说明书建议用户首先阅读裁判系统各模块说明书,了解裁判系统各模块的功能以及安装方式,正确安装裁判系统的各模块,再通过《裁判系统用户手册》了解整个裁判系统的功能。
修改日志本手册将在每赛季根据实际情况更新两次。
手册发布后,根据规定日期生效。
日期版本修改记录生效日期 2022.03.29 V1.21. 增加第三方成品模组的限制2. 删除飞镖“R ”标朝上的限制2022.03.28 2022.01.11 V1.11. 明确底盘功率的定义2. 修订机器人整机成品及开源机器人使用规范2022.01.11 2021.10.15V1.0 首次发布 2021.10.15© 2022 大疆创新 版权所有3目录阅读提示 (2)符号说明 (2)前置参考阅读 (2)修改日志 .................................................................................................................................................. 2 1.前言 ................................................................................................................................................ 10 2.技术规范 ........................................................................................................................................ 11 2.1 通用技术规范 .. (11)2.1.1能源 .................................................................................................................................. 11 2.1.2无线电 ............................................................................................................................. 12 2.1.3光学手段 .......................................................................................................................... 12 2.1.4视觉特征 .......................................................................................................................... 13 2.1.5机器人编号 ...................................................................................................................... 13 2.1.6外观设计 .......................................................................................................................... 14 2.1.7发射机构 .......................................................................................................................... 15 2.1.8自定义控制器 .................................................................................................................. 15 2.1.9其它 ................................................................................................................................. 16 2.2 机器人整机成品及开源机器人使用规范 . (17)2.2.1充分再设计 ...................................................................................................................... 17 2.2.2非充分再设计 .................................................................................................................. 18 2.2.3 无效再设计 . (18)2.3 机器人技术规范 (19)2.3.1英雄机器人 ...................................................................................................................... 19 2.3.2工程机器人 ...................................................................................................................... 20 2.3.3步兵机器人 ...................................................................................................................... 22 2.3.4空中机器人 ...................................................................................................................... 24 2.3.5哨兵机器人 ...................................................................................................................... 26 2.3.6飞镖系统 .......................................................................................................................... 27 2.3.7 雷达 ................................................................................................................................. 31 3.裁判系统安装规范 .......................................................................................................................... 33 3.1概述 ........................................................................................................................................ 33 3.2机器人裁判系统配置 ............................................................................................................... 34 3.3 主控模块安装规范 (35)3.3.1 安装步骤 (36)3.3.2安装要求 (37)3.4电源管理模块安装规范 (38)3.4.1安装步骤 (39)3.4.2安装要求 (41)3.5灯条模块安装规范 (43)3.5.1安装步骤 (44)3.5.2安装要求 (45)3.6装甲模块安装规范 (46)3.6.1通用 (48)3.6.2安装步骤 (51)3.6.3安装要求 (56)3.6.4ID编号设置 (58)3.7测速模块安装规范 (59)3.7.1安装步骤 (60)3.7.2安装要求 (65)3.8场地交互模块安装规范 (66)3.8.1安装步骤 (67)3.8.2安装要求 (68)3.8.3场地交互模块卡 (68)3.9相机图传模块(发送端)安装规范 (68)3.9.1安装步骤 (69)3.9.2安装要求 (70)3.10相机图传模块(接收端)安装规范 (70)3.10.1安装要求 (71)3.11定位模块安装规范 (71)3.11.1安装步骤 (72)3.11.2安装要求 (72)3.1217mm荧光弹丸充能装置安装规范 (73)3.12.1安装步骤 (74)3.12.2安装要求 (75)3.12.3自制紫外灯板指导及要求 (76)3.13超级电容管理模块安装规范 (76)3.13.1安装步骤 (76)3.13.2安装要求 (78)附录一17mm 测速模块转接块工程图 (79)4 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有5 附录二 参考图纸 (80)表目录表2-1 控制方式汇总 (12)表2-2 自定义控制器制作参数说明 (15)表2-3 英雄机器人制作参数说明 (19)表2-4 工程机器人制作参数说明 (20)表2-5 步兵机器人制作参数说明 (22)表2-6 空中机器人制作参数说明 (24)表2-7 哨兵机器人制作参数说明 (26)表2-8 飞镖制作参数说明 (28)表2-9 飞镖发射架制作参数说明 (28)表2-10 雷达运算平台端制作参数说明 (31)表2-11 雷达传感器端参数说明 (31)表3-1 裁判系统组成模块 (33)表3-2 机器人裁判系统模块配置 (34)表3-3 电源管理模块接口对照 (42)6 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有7图目录图 2-1 平衡步兵机器人示意图 (23)图 2-2 航行外观灯有效区域 (26)图 2-3 飞镖触发装置示意图 (29)图 2-4 飞镖触发装置遮挡示意图 (30)图 2-5 飞镖触发装置内部空腔遮挡示意图 (30)图 3-1 主控模块示意图 (36)图 3-2 主控模块安装示意图 (36)图 3-3 主控模块连线示意图 (37)图 3-4 主控模块安装位置示意图 (38)图 3-5 电源管理模块示意图 (39)图 3-6 电源管理模块安装示意图 (40)图 3-7 电源管理模块接口示意图 (41)图 3-8 电源管理模块接线示意图 (41)图 3-9 灯条模块示意图 (44)图 3-10 灯条模块安装示意图 (45)图 3-11 灯条模块底部示意图 (45)图 3-12 灯条模块接线示意图 (45)图 3-13 哨兵机器人灯条模块示意图 (46)图 3-14 指定装甲支撑架示意图 (47)图 3-15 小装甲模块示意图 (47)图 3-16 大装甲模块示意图 (48)图 3-17 机器人坐标系示意图 (48)图 3-18 机器人不同底盘形态X 轴示意图 (49)图 3-19 装甲模块受力示意图 (50)图 3-20 机器人保护示意图 (51)图 3-21 底盘预留孔位 (52)图 3-22 装甲支撑架安装示意图 (52)图 3-23 装甲模块安装示意图 (53)图 3-24 装甲模块连线示意图 (53)图 3-25 底盘预留孔位示意图 (54)图 3-26 装甲支撑架安装示意图 (54)图 3-27 装甲模块安装示意图 (55)图 3-28 底盘预留孔位示意图 (55)图3-29 哨兵支撑架安装示意图 (56)图3-30 哨兵装甲安装示意图 (56)图3-31 地面机器人装甲模块ID设置示意图 (59)图3-32 17mm测速模块示意图 (60)图3-33 42mm测速模块示意图 (60)图3-34 17mm枪管示意图 (61)图3-35 测速模块安装示意图 (62)图3-36 17mm转接块零件示意图 (62)图3-37 17mm转接块固定方式示意图 (63)图3-38 17mm短枪管安装示意图 (64)图3-39 42mm枪管示意图 (65)图3-40 测速模块安装规范示意图 (66)图3-41 场地交互模块示意图 (67)图3-42 场地交互模块连线示意图 (67)图3-43 场地交互模块安装示意图 (67)图3-44 场地交互模块卡示意图 (68)图3-45 相机图传模块(发送端)示意图 (69)图3-46 相机图传模块(发送端)安装示意图 (70)图3-47 相机图传模块(接收端)示意图 (71)图3-48 定位模块示意图 (71)图3-49 定位模块安装示意图 (72)图3-50 定位模块连线示意图 (72)图3-51 定位模块安装示意图 (73)图3-52 17mm荧光弹丸充能装置示意图 (74)图3-53 紫外灯板安装示意图 (75)图3-54 电容管理模块接线示意图 (77)8 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有9附录图目录附录图 1 工程机器人装甲贴纸 - 2号 (80)附录图 2 步兵机器人装甲贴纸 - 3号 (80)附录图 3 步兵机器人装甲贴纸 - 4号 (81)附录图 4 步兵机器人装甲贴纸 - 5号 (81)附录图 5 英雄机器人装甲贴纸 - 1号 (82)附录图 6 平衡步兵机器人装甲贴纸 - 3号 (82)附录图 7 平衡步兵机器人装甲贴纸 - 4号 (83)附录图 8 平衡步兵机器人装甲贴纸 - 5号 (83)附录图 9 前哨站装甲贴纸 (84)附录图 10 基地小装甲贴纸 (84)附录图 11 哨兵机器人装甲贴纸 (85)附录图 12 基地大装甲贴纸 (85)1. 前言RoboMaster参赛队伍需自行研发和制作参赛机器人,参赛机器人需满足本文档描述的所有规范,否则无法通过赛前检录。
iOSD大疆用户手册_v2.10_cn
dJI
dJI
视频输入连接线×1
连接 iOSD 控制器与视频信号源,可支持两路视频信 号输入,并为用户摄像头供电,最大供电电流为 1A。 如果与 DJI Z15 云台搭配使用,请使用 4Pin-音频头 连接线。 如果使用您自己的摄像头, 请使用 4Pin 线并按照引脚 说明进行连接。
视频输出连接线×2
位置-3位置-2(在位置-2 停留 1.5s) :从三位开关的“位置-3”到“位置-2”拨动开关选择视频源,仅在 有 2 路视频输入源的情况下需要进行切换,默认为 AV1。
位置 -1
位置-2
位置 -3
©2012-2013 大疆创新 版权所有
5
视频输出端口说明
· 如果使用DJI指定的无线视频传输模块AVL58,请使用双接头线直接连接。 · 如果使用其它无线视频发射模块,请使用单接头线并按照引脚说明进行连接,其中,频道控制信号用于传 输通道(CH1、CH2、… CH8)控制信号,如果您选用的无线视频传输模块不支持此功能,则此线可不连; 视频信号用于输出视频和OSD信号,请确保正确连线;供电正电压/负电压为您的无线视频模块供电,供 电电压值等于您所使用的电池电压,建议连线时相同功能的两根线都焊接上。 务必检查“无线视频发射模块”的输入电压范围,确保与电池电压匹配才可使用,否则会烧坏您的设 备。例如,“无线视频发射模块“的额定电压为 12V(3S) ,使用的电池为 25V(6S) ,因为 25V 已经超过了 12V,则不能用使用BATT+进行供电。
iOSD (On Screen Display)
用户手册
V2.10 适用 iOSD 固件版本 V3.01 & iOSD 调参软件版本 V4.0* 2014-04-07
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
WooKong HELI用户手册V 1.8免责声明因使用本产品而造成的直接或间接损失与伤害,大疆创新概不负责。
本手册的阅读指南请严格遵守本手册要求将WooKong for Heli (WKH)安装到您的直升机,并安装WKH调参软件至您的电脑。
请注意手册中Lite 处所提醒的WKH和WKH Lite的区别。
DJI和WooKong为大疆创新所有的注册商标。
本文出现的产品名称、品牌等,均为其所属公司的商标或注册商标。
本产品及手册为大疆创新版权所有。
未经许可,不得以任何形式复制翻印。
使用本产品及手册不会追究专利责任。
文中图标解释:禁止参考页面配合遥控器调试需通过软件调试注意安装提示一般提示正确/ 错误目录本手册的阅读指南 (2)目录 (2)DJI WKH产品简介 (3)盒内物品清单 (4)初步安装连接 (5)A1准备工作 (5)A2安装到直升机上 (5)A3连线 (7)A4调参软件基本操作 (9)参数设置流程 (11)B1GPS与IMU安装 (11)B2控制模式切换开关 (12)B3无副翼 (13)B4十字盘 (14)B5总螺距与油门曲线设置 (14)B6锁尾 (14)B7发动机控制器 (16)B8遥控器校准 (17)B9系统检测 (18)B10自驾系统 (19)飞行 (20)C1数字指南针校准 (20)C2手动模式飞行测试 (20)C3失控保护 (21)C4自驾模式飞行测试 (22)产品维护 (24)固件升级 (24)产品信息 (24)附录 (25)WKH LED指示灯状态描述 (25)WKH Lite LED指示灯状态描述 (25)产品特性 (26)DJI WKH 产品简介WKH 是为专业象征机爱好者和玩家设计的飞控系统,他提供了自动平衡,定位,速度控制以及内嵌尾陀螺等功能。
无论是专业应用还是业余娱乐,它都能将用户从繁琐的操控压力中解放出来。
从小型电机到大型油机甚至涡喷直升机,WKH 自动驾驶系统均可适用。
WKH Lite 为无GPS 版的WKH 。
⏹ 基于自驾系统的控制方式:⏹ 内置功能包括:●集成了锁尾陀螺仪直升机的飞行航向(YAW 方向)会因风的影响而偏移,WKH 系统可检测出漂移的角度与速度并控制尾舵修正以抵消这些干扰。
下图所示为,飞机在遇到侧风的情况下,该锁尾陀螺在其两种不同工作模式下的飞行表现。
侧风● 支持无副翼● 集成了内燃式发动机控制器 ● 内置半自主起降功能盒内物品清单主控器主控器是WKH的核心,通过它将IMU、GPS指南针、舵机和遥控接收机等设备接入WKH系统从而实现自动驾驶功能。
通过USB接口调试飞行参数和升级固件等。
(系统要求:Windows XP SP3 或Windows 7)GPS与指南针模块Lite WKH Lite无该物件该模块含两个状态指示灯,应当安装在无遮挡的尾杆上。
×1IMU模块IMU(惯性测量单元)包含3轴加速度计,3轴角速度计和气压高度计。
×1GPS 尾管安装架Lite WKH Lite无该物件GPS尾管安装架和强力双面胶可以使GPS指南针模块牢牢固定在几乎所有直升机上。
×1三针伺服对接线对接线用于连接主控器和遥控接收机。
×10×3M 5925 双面胶Lite WKH Lite无该物件仅用于GPS与指南针模块。
×4保修卡×1×1初步安装连接A1 准备工作安装前,请您确保飞机在没有任何自驾辅助设备的情况下能正常飞行。
在安装WKH 前,您需要使用其它陀螺仪代替WKH 的锁尾陀螺调试飞机,尽可能将飞机震动减至最低。
请勿跳过此步骤。
A2 安装到直升机上⏹ IMU● 安装位置:IMU 最好靠近飞机重心位置安装,震动相对较小。
●安装方向:IMU 上标有箭头的那一面朝上,按您的需要将箭头指向飞机的正前/后/左/右方,IMU 需与机身保持平行。
请勿上下颠倒安装。
● 安装方式:可用双面胶固定。
⏹ GPS 与指南针模块Lite WKH Lite 用户可跳过该步骤1 234● 安装位置:固定在尾管上,位于主旋翼头与尾桨之间。
指南针为磁性敏感设备,因此将其置于至少远离舵机20 cm 或远离电动机/内燃发动机30 cm 的位置。
GPS 对震动干扰敏感,请将其置于至少远离尾旋翼10 cm 处。
GPS 模块不应过于靠近主旋翼头,因为旋翼面会衰减GPS 信号。
对于大型像真直升机,您可将GPS 置于主轴的前面或者后面。
●安装方向:有DJI 标记的一面朝上,箭头指向飞机正前方。
初次安装时可看到外壳上贴有指示标。
⏹ 主控器●安装位置:主控器的安装对朝向没有要求,需距离内燃式发动机或电动机20cm 以上。
选择恰当的位置安装,减短舵机连接延长线的使用,以减少电磁干扰。
安装时还请注意使USB 接口不被遮挡,以便与电脑连接。
⏹LED 指示灯●安装位置:将LED指示灯放置在机身的合适位置。
A3连线电池必须提供稳定的电压, 4.8 - 8.4 伏。
可以将其接入主控器⏹CAN Bus - WKH模块接口WKH主控器可通过CAN总线端口为其它WKH模块供电并与其通信。
总共3个CAN总线端口:其中2个在主控器上,1个在GPS指南针连接线上。
WKH能自动识别所接入的设备。
●GPS指南针模块可以接入主控器上任意端口。
●IMU可以接入主控器上任意端口⏹ 接收机与舵机第1步: 设置遥控器十字盘输出为非混控模式。
(Futaba: H-1; JR/Spectrum: 1sNORM; Hitec: 1-Servo 90°)按下图所示,将接收机接入主控器的输入端口。
R/C Receiver(Futaba / Hitec)1234567 R/C Receiver (JR)AUX2AUX1GEAR ELEV RUDD THRO AILE ELEV GEAR AUX1AUX2U用于控制模式切换P 用于总螺距(上下)方向控制G用于陀螺感度调节R 用于尾舵控制 T 用于油门控制E 用于俯仰(前后)方向控制 A用于横滚(左右)方向控制第2步: 请参照下图将十字盘舵机(按照您直升机的类型)和油门舵机或ESC (暂时不要连接尾舵)接入WKH 舵机输出端口。
S1S2S3S4接十字盘舵机THR 接油门舵机或电机调速器(ESC )RUD接尾舵舵机 F1F2保留⏹ 电池或稳压电源(BEC )主控器任意输入或输出端口均可接入电源,为接入主控器的其他电子设备供电。
WKH 的工作电压为4.8V 至8.4V 直流电,与舵机和接收机共用电源。
因此在选择电源的时候,需确保电源能满足舵机的工作要求。
对于大型电动直升机,推荐使用4000mAh 以上高容量电池。
根据使用的舵机类型,多桨飞机的数字舵机可能会需要10A 的稳压电源。
A4 调参软件基本操作⏹ 安装调参软件与驱动程序请阅读《软件与驱动程序安装指南》。
下图所示的Micro-USB 接口用于WKH 系统的参数调节以及固件升级。
⏹ 软件界面介绍12341615141312111067589III如何修改WKH 参数?I任何已修改的参数,将以红色粗体提示;II将参数写入主控器。
可被直接编辑的项目除外, 他们可以被直接写入主控器。
1工具→ 固件升级:从DJI 服务器获得最新的固件,使您的WKH系统与最新产品保持同步。
→ 登陆:为了向您提供更好的服务,请注册用以升级固件,软件和说明书下载。
若已注册,请在此登陆DJI 服务器。
2 关于→ 您所持有的WKH 产品的版本信息等。
3 导出:将当前的系统中的参数导出并保存成文件。
4 导入:将已保存的WKH 系统参数导入主控器。
5 向导:初次使用本产品时请使用该向导模式。
6写入:将当前页面的数据写入您的WKH 主控器。
已被改变,但未被写入的参数及其标题颜色将会变成红色粗体,此时您需要点击该按钮将改变更新至WKH 主控器。
7 读取:从WKH 主控器中读取该页参数。
8 全部写入(Write all ):将所有页面的参数改变更新到WKH主控器中。
9 图形指南10 文字指南11 无副翼功能开关(ON/OFF )指示 12发动机控制器工作模式指示 13 锁尾陀螺工作模式与陀螺感度指示 14 自驾系统工作模式指示15 红灯:WKH ←→ PC 已断开连接。
绿灯:WKH ←→ PC 已连接。
蓝灯:WKH ←→ PC 数据通信。
16 您可以从这里找到所有出现在“向导”中的页面。
飞行与参数设置流程快速查看B1GPS 与IMU 安装请测量直升机的重心,并填入GPS 与IMU相对重心的安装位置; 11B2 控制模式切换开关请调节遥控器对应于U的通道,您将通过它进行自驾系统的手动/ GPS姿态 /姿态工作模式切换;12B3 无副翼 请选择无副翼功能是否开启; 13 B4 十字盘跟据您的直升机设置十字盘;13B5 总螺距与油门曲线设置 请依照我们的推荐值,在遥控器中设置总螺距曲线与油门曲线;14B6 锁尾 检查尾舵是否正确响应来自遥控器的命令(使飞机顺时针或逆时针旋转); 14B7 发动机控制器 无论使用内燃机还是电动机,都需要设置此项;16B8 遥控器校准 R、P、A与E通道需要进行校准; 17 B9C1 数字指南针校准后会自动退出至正常工作状态;20C2 手动模式飞行测试请遵照测试流程,在试飞阶段您可能需要调节以下参数,使飞机得到最佳性能:20 B3 无副翼控制参数,如果使用了无副翼系统; 13 B6 锁尾感度;14 B7 发动机速度与感度,如果使用内燃机。
16C3C4 自驾系统飞行测试B10自驾系统控制参数;19 B3 无副翼控制参数,如果使用了无副翼系统。
13Lite WKH 和WKH Lite 的调参软件有所不同。
但当您将GPS 模块接入WKH Lite 主控并打开调参软件后,其将自动变为WKH 调参软件。
参数设置流程B1 GPS 与IMU 安装Lite WKH Lite 用户可忽略GPS 安装。
进入调参软件的安装页面:第1步: 第2步: 填入IMU 与GPS 安装位置与飞机重心的相对距离,X 、Y 与Z 轴,请按以下方式确定重心位置: a) 如下图所示,使直升机沿X 、Y 轴方向平衡。
使X 和Y 方向平衡b) 重心将位于Z 轴上。
c) 以尾部(最好在尾撑上)为悬挂点吊起直升机,过悬挂点垂直于水平地面的延长线会与Z 轴相交,此交点即为飞机的重心。
您也可以用其它办法估算直升机的重心位置。
*步骤c ),对于大型像真机直升机,可以将IMU 的安装位置值设为0。
GPS 通常装于尾管上,因此Y 与Z 可以置为0,将其到主轴的距离填入X 。
cm )。
第1步第2步WKH Lite 无该栏目B2 控制模式切换开关4 您至少需要一个双位或三位开关用作控制模式切换开关。