数字化工厂之物流仿真1
数字化工厂仿真解决方案

数字化工厂仿真解决方案数字化工厂作为产品设计与制造的媒介逐渐成为一种新型的生产组织方式,它立足于产品整个周期的相关数据,以真实数据为依托,在虚拟环境中对生产全过程进行仿真、优化及重构。
数字化工厂以“数据驱动”为导向,分别从已经实施的CAD、PLM 系统中获取产品相关数据,同时在ERP系统获取生产计划数据,基于仿真技术和虚拟现实技术的数字化工厂技术,对真实的产品制造过程进行严谨虚拟规划和仿真分析优化,分析过程在数字化环境中进行,并在分析后将仿真和优化结果反馈到相关系统,用来验证其可行性和系统生产能力。
通过对生产过程的预测,对工艺过程进行优化,最终对生产决策进行裁决。
Tecnomatix是Siemens PLM Software提供的数字化制造解决方案,通过将制造规划包括从工艺布局规划和设计、工艺过程仿真和验证到制造执行与产品设计连接起来,实现在3D的环境下进行制造工艺过程的设计;用数字化的手段验证产品的制造工艺可行性;事先分析未来的生产系统的能力表现;快速输出各种定制类型的工艺文件。
Siemens PLM Software致力于将Tecnomatix数字化制造解决方案与Teamcenter产品全生命周期管理解决方案融合,将原Tecnomatix Process Designer模块与Teamcenter Manufacturing 模块进行整合,形成一套在Teamcenter平台上统一管理数字化制造的解决方案,全称:Teamcenter Manufaturing Process Management(简称MPM),是西门子公司针对制造业提供的产品生命周期管理(Product Lifecycle Management)的解决方案的内容之一,旨在建立一个数字化生产环境,管理产品制造的相关数据,实现设计/工艺一体化及管理,是目前市场上功能比较完备的一套制造解决方案。
这样带来的好处是,设计人员和工艺人员可以在一个平台上共享设计数据和工艺数据,各自进行设计、仿真和管理。
数字化工厂布局仿真

数字化工厂布局仿真随着经济的全球化,产品的竞争消除了国界,其复杂程度越来越高。
产品更新换代加速以及客户化定制生产方式的形成,给企业提出了更高的要求,如缩短新产品上市和交货时间(T),提高产品质量(Q),降低生产成本(C),提供全方位的服务(S),即TQCS。
计算机仿真技术的发展和虚拟现实技术的产生,使数字化工厂技术(Digital Factory)逐渐成为一个新的研究热点。
数字化工厂技术将传统的基于手工和经验的设计规划转变为基于计算机仿真和优化的精确可靠的规划设计,从而减少了工厂与工艺规划的时间,缩短了生产准备周期,优化了生产线配置,减少了工程更改量,降低了开发成本和投资风险。
1 数字化工厂技术数字化工厂是以产品全生命周期的相关数据为基础,利用计算机仿真技术,根据虚拟制造原理,在虚拟环境中,对整个生产过程进行规划、仿真和优化的一种现代生产组织方式。
在数字化工厂中,产品的加工制造、装配、测试、生产规划和物流管理等都可以得到模拟,这使得规划工程师、工艺工程师和工业工程师可以在一个虚拟的环境中对未来的过程进行预分析。
数字化工厂的基本功能如图1所示。
图1 数字化工厂的基本功能2 基于DELMIA/QUEST的虚拟仿真技术应用DELMIA/QUEST是用于对工艺流程的准确性和生产效率进行仿真分析的全三维数字环境。
QUEST拥有强大的三维可视化功能和健全的导入/导出功能,可接收来自Auto CAD、Pro/E、UG、Catia、Creator等多种三维建模软件的模型,因此在QUEST环境中还可以采用精准的三维模型来解决工厂的布局规划问题。
本文以某厂采煤机4大关键零部件的机械加工车间为例进行仿真说明。
2.1 搭建车间三维布局模型搭建车间三维布局模型需要搭建的虚拟物理模型包括厂房框架、机器设备、物流运输设备等,这里以Pro/E为例说明模型导入的技巧。
Pro/E模型包含了过多的面片和数据,如果直接导入QUEST会导致运行困难,再者QUEST中的模型只要求外形尺寸精准即可,因此要对Pro/E模型进行简化处理,具体步骤如下:(1) 将建好的Pro / E(*.part.1)模型保存为*.wrl格式的文件,如果是装配体(*.asm.l)模型,最好先收缩包络简化后再保存为*.wrl格式文件。
基于数字化工厂的车间布局仿真与物流优化
基于数字化工厂的车间布局仿真与物流优化发表时间:2017-11-29T10:24:28.927Z 来源:《电力设备》2017年第23期作者:刘栋[导读] 摘要:数字化工程和信息技术的发展,加快了企业快速响应市场需求的能力,大大提高了生产能力和生产效率。
(中国汽车工业工程有限公司天津 300113)摘要:数字化工程和信息技术的发展,加快了企业快速响应市场需求的能力,大大提高了生产能力和生产效率。
车间布局是制造企业快速响应市场和产品竞争力的重要影响因素之一,是实现制造业数字化的首要任务。
基于此,本文主要对基于数字化工厂的车间布局仿真与物流优化进行分析探讨。
关键词:基于数字化工厂;车间布局仿真;物流优化1、前言数字化工厂技术将传统的基于手工和经验的设计规划转变为基于计算机仿真和优化的精确可靠的规划设计,从而减少了工厂与工艺规划的时间,缩短了生产准备周期,优化了生产线配置,减少了工程更改量,降低了开发成本和投资风险。
基于数字化工厂的车间布局规划方法,通过可视化的三维虚拟车间和定量化的分析方法为工程人员对布局方案的评估和优化提供便利,提高生产效率。
2、车间布局与仿真框架模型先进制造系统首先是一个集成化的数据系统,这些数据随着产品的制造过程在各个系统中创建、存储、传输和转换,如产品、工艺、生产计划与控制和生产资源等。
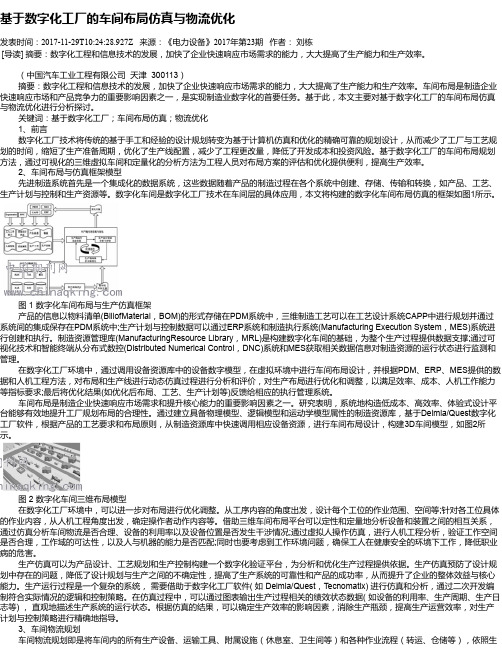
数字化车间是数字化工厂技术在车间层的具体应用,本文将构建的数字化车间布局仿真的框架如图1所示。
图 1 数字化车间布局与生产仿真框架产品的信息以物料清单(BillofMaterial,BOM)的形式存储在PDM系统中,三维制造工艺可以在工艺设计系统CAPP中进行规划并通过系统间的集成保存在PDM系统中;生产计划与控制数据可以通过ERP系统和制造执行系统(Manufacturing Execution System,MES)系统进行创建和执行。
制造资源管理库(ManufacturingResource Library,MRL)是构建数字化车间的基础,为整个生产过程提供数据支撑;通过可视化技术和智能终端从分布式数控(Distributed Numerical Control,DNC)系统和MES获取相关数据信息对制造资源的运行状态进行监测和管理。
18号厂房数字化工厂仿真报告0706
真仿器容、装工 真仿步初线产生 计设拟虚区观景 真仿构结局布房厂
标目
标目及围范真仿厂工、一
围范 号序 段阶
工重一三
3
行进互交真仿与计设案方
程过真仿真仿厂工、二
工重一三
4
房厂体整-示展果效真仿厂工、三
工重一三
5
图果效线装部腿支
图果效线装部块阀
区配装南-示展果效真仿厂工、三
图果效线装部架臂
图果效线装总车泵
21----------------------------- 用作真仿厂工 3 ------------------------------程过真仿厂工
程议报汇
4 ------------------------- 示展果效真仿厂工
2------------------------标目及围范真仿厂工
工重一三
6
图果效线装部构机送泵
图果效线装部板平熨机铺摊
图果效线装总泵载车 区配装北-示展果效真仿厂工、二
图果效线装总泵拖
工重一三
7
图果效线工加性柔类轴 区工加精高-示展果效真仿厂工、三
图果效线工加块阀
工重一三
8
8
区验体体实
区观景色特
区动互能功多
区闲休态动
区观景口入
区验体拟虚
区观景-示展果效真仿厂工、三
工重一三
11
图果效线产生箱水
图果效线产生杆连
图果效线产生塔转定固Leabharlann 区件构结-示展果效真仿厂工、三
工重一三
21
计设助辅速快线产生-用作真仿、四
工重一三
31
拟模案方多-用作真仿、四
工重一三
41
计设拟虚-用作真仿、四
数字化工厂中生产物流的瓶颈理论分析江衡仿真
瓶颈理论在生产物流系统中的应用1引言1.1选题背景我国加入WTO后,中国作为世界制造中心的地位越来越明显。
生产物流是企业进行生产的必备条件,是整个物流的关键环节。
认识和研究生产物流活动,将有利于企业物流优化,有利于降低生产物流成本,从而降低产品成本,增强企业的市场竞争力。
然而,目前国内的大多数企业的生产物流缺乏合理规划,造成了生产资源的浪费和生产效率的低下。
过去三十年,产品的品种成数百倍增长,客户可选择的产品越来越多,对产品交货期要求越来越短。
在这种环境中公司会承受以下困扰:(1)客户经常变更订单,生产体系面临越来越多的风险和挑战;(2)急单插单出现频率越来越高,生产计划经常改变;(3)公司的交货期没有保证,客户经常抱怨;(4)由于客户无法满意公司不稳定的表现而离去;(5)公司的实际产能远远达不到设计产能,而生产人员已经处于高负荷工作状态;(6)成品质量不稳,耗尽公司的利润;(7)公司的在制品库存占用了大量的资金和空间;(8)材料和部件短缺致使生产计划无法按期完成;(9)产成品在供应链体系中同时出现积压和短缺;(10)紧急采购和发货增加额外资金消耗;(11)供应链反应周期太长,没办法实现和市场的良性互动。
1.2国内外研究现状目前,大多数制造企业把生产物流规划的重点放在了对流体的性能识别、流向的分析和流程的控制上,按照均衡生产的无限能力进行规划。
这种生产物流设计规划的前提是整个生产物流系统的资源都能够提供足够大的物流能力,但是在实际生产中各种资源的能力不可能是设计得完全相等的即不可能最初就实现最大能力的均衡生产。
此时,整个生产系统的产出水平便取决于有效产出最低的环节—瓶颈。
1.3论文的研究方法和目的本论文利用TOC(约束理论)对生产物流中的物流瓶颈进行识别,然后利用DBR系统计划与控制模式,立足瓶颈并寻找突破,在此基础上按照有限能力对物流资源进行逆排序并得出实现生产物流同步的几点建议,同时引入需求拉动生产计划,初步建立并完善企业内部物流准时化管理和供应链一体化管理系统。
数字化工厂与工厂仿真

2
信号生成
代码生成 程序生成
Virtual PLC
Tecnomatix™Stamping 仿真板金冲压过程。可以对冲压设备、冲压模进行仿真,也可以对冲压 生产线进行仿真。特别在汽车板金冲压线的规划上提供必要的验证,如对送料机构的设计验证。
11
传统机械加工过程中,数控设备的程序都需要物理试切才能确定加工程序的可行性,现在在 Tecnomatix™中Real-NC Machine软件可以实现虚拟的切削过程的模拟,分析刀路的正确性和完 整性;分析机床设备可能存在的干涉和碰撞;
Tecnomatix™提供在3D的环境下仿真模拟分析由单台工业机器人(自动化焊接设备)工位或者多 机器人的焊接生产线的焊接过程。主要分析和优化设备运动路线和时间节拍以及设备的离线编程 应用。Tecnomatix™在机器人仿真模拟领域是最杰出的应用软件。(ROBCAD)
Tecnomatix™Process Simulate/Kinematics 提供在3D的环境下仿真模拟各种具有复杂运动的设备和工装夹 具;分析设备运动的可行性、可达性,运动过程的干涉以及设备之间的协同,设备与人之间的协调等。以便尽 早的发现设备和工装夹具设计中存在的错误,加快投产速度,降低制造成本。
• 适应制造过程中各种层次的仿真需要
工厂
Байду номын сангаас
车间/生产线
工位
设备/资源
Tecnomatix数字化制造具有PLM环境下的全面仿真能力; 仿真所使用的数据能方便地从装配工艺规划中直接提取,是完全一体化的解决方案; 缩短产品工艺准备的周期,提高工艺设计的质量; 现场的工艺问题在数字化环境下提前得到分析;
• 数字化工艺仿真
• 工厂仿真
物流系统仿真与模拟实验总结报告
《物流系统仿真与模拟实验》总结报告学号:姓名:一、实验经过实验一:1.对[右分流传送带]属性进行设置,在[尺寸]按钮中,将长度改成〈1500〉+〈1500〉,将角度改成〈30〉。
2.对[右曲传送带]属性进行设置,在[概要]属性里的设备旋转角度的Z轴的角度改成〈240〉;在[尺寸] 按钮中,将角度改成〈60〉,半径改成〈1900〉。
3.添加三名操作员和四种颜色货物。
实验二:1.点击设备栏的自动立体仓库按钮,使自动立体仓库表示出来。
2.选择自动立体仓库的弹出菜单中的[],使入库口(In Mode)表示出来。
3.选择自动立体仓库的弹出菜单中的[],使出库口(Out Mode)表示出来。
4.点击工具栏中的可移动子类设备按钮。
在这里要将左侧设置为入库,右侧设置为出库,所以要将入库口(In Mode)和出库口(Out Mode)的位置颠倒过来。
5.点击设备栏的装货中转站按钮,使装货中转站表示出来。
6.选择装货中转站的弹出菜单中的旋转90度改变其方向,使输入口的入口部分和装货中转站的出口部分自动连接上。
7.点击设备栏的托盘供应器按钮,使托盘供给器表示出来。
托盘供给器可自动生成托盘。
点击设备栏的与下一个设备相连按钮,使托盘供给器表示出来。
托盘供给器可自动生成托盘。
8.点击设备栏的机器人按钮,表示出机器人后,将其设置于装货中转站输入口的入口一侧。
调整机器人和输入口之间距离使其位置正好适合于机器人来回转动180度。
利用弹出菜单中的与下一个设备连接将机器人连向装货中转站的输入口。
实验三:1. 用《Ctrl》+《C》、《Ctrl》+《V》在自动立体仓库的两边添加1套自动立体仓库。
2. 点击设备栏的[滑车铁轨]按钮,使滑车铁轨表示出来。
将滑车铁轨设置于装货中转站和自动立体仓库之间的位置上。
打开滑车铁轨的属性窗口,将[概要]属性里的速度改为〈60〉。
为了能使滑车铁轨对应三个自动立体仓库,需将其主体加长。
点击[尺寸]属性,将主体的长度改为〈12000〉后,点击[OK]按钮。
物流仿真技术在数字化工厂中的实例应用
物流仿真技术在数字化工厂中的实例应用物流仿真技术是借助计算机技术、网络技术和数学手段,采用虚拟现实方法,对物流系统进行实际模仿的一项应用技术,它需要借助计算机仿真技术对现实物流系统进行系统建模与求解算法分析,通过仿真实验得到各种动态活动及其过程的瞬间仿效记录,进而研究物流系统的性能和输出效果。
物流仿真技术在复杂物流系统的分析和决策中的巨大价值已成为不争的事实,每年都创造数以千亿美元的经济效益。
本文将从工业4.0出发,着眼于智能制造、智能工厂、数字化工厂,通过物流仿真技术在多个行业领域的实例,说明物流仿真技术的意义。
背景工业4.02011年德国汉诺威工业博览会上,德国相关协会提出工业4.0的初步概念,此后德国机械设备制造联合会等协会牵头,来自企业、政府、研究机构的专家成立了“工业4.0工作组”进一步加强工业4.0的研究并向德国政府进行报告,2013年发表了工业4.0标准化路线图,组建了由协会和企业参与的工业4.0平台(Platform-i4.0),德国政府也将工业4.0纳入《高技术战略2020》中,工业4.0正式成为一项国家战略。
由此产生的德国“工业4.0”战略,旨在通过充分利用信息通讯技术和信息物理系统(CPS)相结合的手段,推动制造业向智能化转型。
工业4.0主要表现在几个方面:互联、集成、数据、创新和转型。
互联就是要把设备、生产线、工厂、供应商、产品以及客户紧密地连接在一起。
集成就是将无处不在的传感器、嵌入式终端系统、智能控制系统、通信设施通过CPS形成一个智能网络,使人与人、人与机器、机器与机器以及服务与服务之间能够互联,从而实现横向、纵向和端对端的高度集成。
数据是区别于传统工业生产体系的本质特征,在工业4.0时代,制造企业的数据将会呈现爆炸式增长态势,随着信息物理系统(CPS)的推广、智能装备和终端的普及以及各种各样传感器的使用,将会带来无所不在的感知和无所不在的连接,所有的生产装备、感知设备、联网终端,包括生产者本身都在源源不断地产生数据,这些数据将会渗透到企业运营、价值链乃至产品的整个生命周期,是工业4.0和制造革命的基石。
基于数字化工厂的车间布局仿真与物流优化
0 引 言
多种三 维建模 软 件 的模 型 , 此在 QUE T环 境 中还 因 S 可 以采 用 精 准 的 三 维 模 型 来 解 决 工 厂 的 布 局 规 划 问 题 [ 。本 文 以某厂 采煤 机 4大关 键 零部件 的机 械加 工 6 ]
拟 , 使得 规划 工程 师 、 艺工程 师和 工业 工程 师可 以 这 工 在 一个 虚拟 的环 境 中对未来 的过 程进 行预分 析 [ 。数 5 ]
字 化 工厂 的基本 功能 如 图 1 所示 。 2 基 于 D l a QU S e mi/ E T的虚 拟仿真 技术应 用 D l a QUE T是用 于对 工 艺 流 程 的 准 确 性 和 e mi / S
第 3期 ( 第 1 2 ) 总 7期
21 0 2年 6月
机 械 工 程 与 自 动 化
M ECHANI CAL ENGI NEERI NG & AUT0M AT1 0N
No 3 .
J n u.
文 章 编 号 :6 26 1 (0 20 — 0 50 17 - 4 32 1) 30 2 — 3
产 准 备周期 , 化 了生 产线 配 置 , 优 减少 了工程 更 改量 , 降低 了开发 成本 和投 资风 险 ] 。
1 数字化 工厂 技术
wr格 式 的文件 , l 如果 是装配 体 ( am. ) 型 , 好 *. s 1 模 最
先 收缩 包 络简化 后再保 存 为 - wr 格 式文件 。 y : l .
算 机 仿真 技术 的发展 和 虚 拟 现实 技 术 的 产生 , 使数 字 化 工 厂技术 ( ii l atr ) 渐 成 为 一个 新 的研 究 D gt coy 逐 aF 热点 。数 字化工 厂技 术将传 统 的基 于手工 和经 验 的设
数字化工厂 物流仿真之Quest使用
江衡仿真一 Quest概述 二 建立仿真系统 三 编写仿真逻辑一 Quest概述Part: 物流过程中的产品 Source: 产生part并将其输送到仿真系统中的部件 Buffer: 用于物料缓冲 B ff Machine: 机器 Labor: 工人 用于运送 操作部件 工人,用于运送,操作部件 Conveyor: 传送带 Carrier:运送装置 Sink: 相对于Source,用于接受系统处理好的Parts Logic: 用仿真控制语言编写的逻辑控制程序 Class: 用于创建一个及以上数目的element 并且这些 用于创建一个及以上数目的element, element拥有相同属性; Element:继承class属性的实体;软件中class 和element的系统命名规则: 以Source为例:Source1为class名,Source1_1 为Source1这个class 下的创建的一个element 下的创建的一个element。
其它实体命名依次Source1_2,Source1_3……。
(当然建立class时可以自己命名,生成的element (当然建立class时可以自己命名 生成的element 则自动如上依从class命名) Quest中Class和Element类型:AGVs, Quest中Class和Element类型:AGVs AGV path systems, buffers, controllers, conveyors, labor, labor power and free path systems sources systems, sources, sinks, and machinesQuest物流仿真理解 Parts从Source处产生,经过中间的各个组件 buffer, machine, conveyor, labor …… 的运送、 处理,最后到达S 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一 Quest概述
Part: 物流过程中的产品 Source: 产生part并将其输送到仿真系统中的部件 Buffer: 用于物料缓冲 B ff Machine: 机器 Labor: 工人 用于运送 操作部件 工人,用于运送,操作部件 Conveyor: 传送带 Carrier:运送装置 Sink: 相对于Source,用于接受系统处理好的Parts Logic: 用仿真控制语言编写的逻辑控制程序 Class: 用于创建一个及以上数目的element 并且这些 用于创建一个及以上数目的element, element拥有相同属性; Element:继承class属性的实体;
软件中class 和element的系统命名规则: 以Source为例:Source1为class名,Source1_1 为Source1这个class 下的创建的一个element 下的创建的一个element。
其它实体命名依次Source1_2,Source1_3……。
(当然建立class时可以自己命名,生成的element (当然建立class时可以自己命名 生成的element 则自动如上依从class命名) Quest中Class和Element类型:AGVs, Quest中Class和Element类型:AGVs AGV path systems, buffers, controllers, conveyors, labor, labor power and free path systems sources systems, sources, sinks, and machines
Quest物流仿真理解 Parts从Source处产生,经过中间的各个组件 buffer, machine, conveyor, labor …… 的运送、 处理,最后到达S 。
物流过程中,针对 a ts和 处理,最后到达Sink。
物流过程中,针对Parts和 各个组件,用户可以设置自己定义的各种物流逻辑。
以 比如可以设计不同的物料经由不同的机器加工
实例:(参见basic_concept.mdl和basic_concept.avi) 实例:(参见basic concept mdl和basic concept avi) 实例中,Part1下的实体都从Source1_1处产生,经过Buffer1_1, y 到Machine1_1加工,然后再经过Conveyor1_1到达Sink1 _1.
二 建立仿真系统
根据上图三个红色椭圆代表的三个步骤操作: 第一步:建立仿真系统中的part 第二步:建立仿真系统中的各类组件模型 第二步 建立仿真系统中的各类组件模型 第三步:连接仿真系统中的各类模型
(详细流程操作见basic_concept.avi,参考模型见 (详细流程操作见b i i 参考模型见 basic_concept.mdl)
详细流程操作见agv_construct.avi 详细流程操作见 i 参考模型见agv_construct.mdl
AGV方式: AGV建模分四个部分: AGV Controller:用于控制相应的AGV Path System和AGV Dec Point AGV Path System:定义AGV的轨迹 AGV Dec Point:定义轨迹上AGV的行为点 D P i t 定义轨迹上AGV的行为点 AGV:运送物料的小车
另外,工业生产制造过程中另一种AGV方式:Crane 另外 工业生产制造过程中另一种AGV方式:Crane AGV(行车) Crane AGV建模与上面通用AGV建模方式类似, AGV建模与上面通用AGV建模方式类似 共有四个部分
详细流程操作见crane_agv_construct.avi 详细流程操作见crane agv construct avi 参考模型见crane_agv_construct.mdl
Conv方式: Quest中Conveyor有两种形式: 1引用模型库中的模型 2 自由创建Conveyor形式
详细流程操作见conveyor_construct.avi 详细流程操作见 i 参考模型见conveyor_construct.mdl
SCL(simulation control language)
以上实例只局限在创建模型和赋予模型基本属性,更多逻 辑还得用户自己来定义,为此,Quest提供了交互接口 SCL语言,方便用户用自己的逻辑来控制实体行为。
SCL是用来控制仿真模型中实体的动作和行为的语言。
2种类型:procedure , routine
使用方式: 使用Logic按钮下的User Func来读取外部SCL文件,
江衡仿真 因为用心,所以专业 因为用心 所以专业
。