电机旋转方向的定义
绕组接线与电机旋转方向
单相异步电机动机绕组接线与电机旋转方向单相异步电动机广泛应用于电冰箱、洗衣机、空调、电风扇等家用电器中。
怎样才能确保这类电机绕组修理后转向符合原来设备运转要求?这里就单相异步电机绕组接线与电机旋转方向的关系简单介绍如下:电动机转子旋转的方向是根据左手定则决定的。
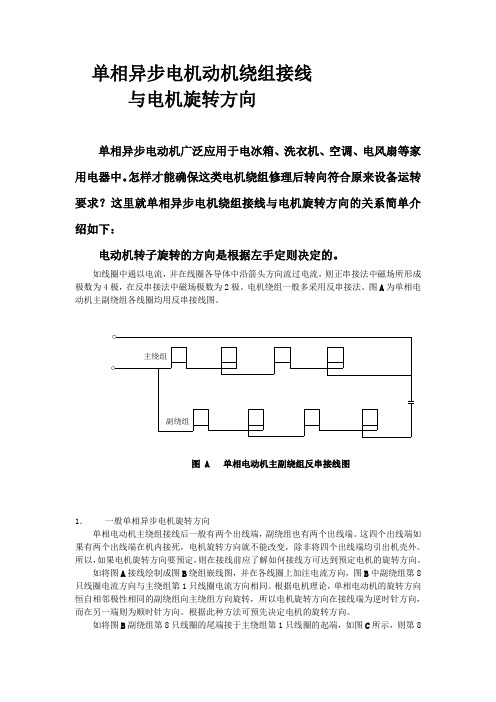
如线圈中通以电流,并在线圈各导体中沿箭头方向流过电流,则正串接法中磁场所形成极数为4极,在反串接法中磁场极数为2极。
电机绕组一般多采用反串接法。
图A为单相电动机主副绕组各线圈均用反串接线图。
主绕组副绕组图 A 单相电动机主副绕组反串接线图1.一般单相异步电机旋转方向单相电动机主绕组接线后一般有两个出线端,副绕组也有两个出线端。
这四个出线端如果有两个出线端在机内接死,电机旋转方向就不能改变,除非将四个出线端均引出机壳外。
所以,如果电机旋转方向要预定,则在接线前应了解如何接线方可达到预定电机的旋转方向。
如将图A接线绘制成图B绕组嵌线图,并在各线圈上加注电流方向,图B中副绕组第8只线圈电流方向与主绕组第1只线圈电流方向相同。
根据电机理论,单相电动机的旋转方向恒自相邻极性相同的副绕组向主绕组方向旋转,所以电机旋转方向在接线端为逆时针方向,而在另一端则为顺时针方向。
根据此种方法可预先决定电机的旋转方向。
如将图B副绕组第8只线圈的尾端接于主绕组第1只线圈的起端,如图C所示,则第8只线圈中的电流方向改变,其极性与主绕组第7只线圈相同,根据电机理论确定电机旋转方向将为顺时针方向。
故单相电动机旋转方向改变,只需将故绕组与主绕组相接的两根端线互调即可达到。
2、绕组接线正误的测试电机的主绕组或副绕组各线圈接线完毕后,接线是否有误,可用图1-97所示的方法测试。
将绕组的两个线端接以8~10V直流电,将指南针置于各线圈端部上面,如指南针在各线圈所指示极性交替成为南极与北极,则表示接线正确。
如某一线圈极性不对,则表示此线圈接线错误。
3、罩极电机旋转方向罩极显极式电机磁极上有一个副绕组。
电机正反转电路原理

电机正反转电路原理
正转和反转是电机工作的两个基本方向。
正转是指电机按照设定的方向顺时针旋转,而反转则是指电机按照设定的方向逆时针旋转。
实现电机的正转和反转需要通过控制电机的电流流向来实现。
电机正反转电路的基本原理是利用电流的正向和反向流动来改变电机的旋转方向。
在正转情况下,电流从电源的正极流向电机的正极,然后通过电机绕组产生的磁场作用,电机开始顺时针旋转。
在反转情况下,电流从电源的正极流向电机的负极,然后通过电机绕组产生的磁场作用,电机开始逆时针旋转。
为了实现电机的正反转,需要使用一个电机驱动电路。
这个电路通常由电源、开关、电机和其他辅助元件组成。
在正转情况下,开关接通,电流从电源的正极流向电机的正极,然后通过电机绕组产生的磁场作用,电机开始顺时针旋转。
在反转情况下,开关断开,然后反向接通,电流从电源的正极流向电机的负极,然后通过电机绕组产生的磁场作用,电机开始逆时针旋转。
为了确保电机正反转时的可靠性和安全性,通常在电机正反装置电路中加入一些保护元件。
例如,可以在电路中添加保险丝或熔断器来防止电流过大损坏电机或电路。
此外,还可以添加过载保护开关以及过热保护开关,以保护电机在工作过程中的安全。
总之,电机正反转电路通过改变电流的流向来实现电机的正反
转,为了保证电机正反转的可靠性和安全性,需要在电路中添加一些保护元件。
电机旋转方向的定义

电机旋转方向的定义
问题:
文献
涉及产品
电机的旋转方向是如何定义的?
解答:
按照 DIN EN 60034-8 的规定,电机的旋转方向定义如下: 旋转方向是指从电机驱动侧观察的方向 驱动侧是指电机带有输出轴伸的一侧 对于带有双轴伸的电机,驱动侧为: a) 具有较大轴径的一侧 b) 如果两端轴径相同,是指与风扇相反方向的一侧
标注为顺时针方向的电机从驱动侧看轴为顺时针旋转(观察方向为从驱动侧向非驱动册 看)
标注为逆时针方向的电机从驱动侧看轴为逆时针旋转(观察方向为从驱动侧向非驱动册 看)
注意: 由于电机和负载机械的旋转方向是以各自的轴伸作为参考的,所以通常需要选择与负载 机械相反的方向作为电机的旋转方向。
也就是说,逆时针方向的负载机械需要选择顺时针方向的电机来驱动,顺时针方向的负 载机械需要选择逆时针方向的电机来驱动。
。
电动机旋转方向判断方法

如果电源端A/B/C三相分别接入电机出厂设定的A/B/C三相,电机启动后,可能是顺时针转,也可能是逆时针转。
电机的正转可以是顺时针,也可以是逆时针,国家标准没有硬性规定。
从电动机的轴向看,顺时针旋转的就是顺时针,逆时针旋转的就是逆时针。
如果是双轴的,以主轴为准(输出轴或大轴);双轴一样的,以负载要求判断,即主要负载在哪个方向,则从那个方向看。
单相异步电动机的旋转方向与其主、辅绕组的相互位置有关。
也即与主、辅绕组出线端的相互连接有关。
但某些电动机,其主、辅绕组在电动机内部已接在一起,这时要在外部改变电动机旋转方向已不可能(有双向旋转出线端的除外)。
因此,在空载试验时如发现这类电动机的旋转方向不对时,应将电动机内部的绕组接线予以改接,使之符合正确的转向。
海为伺服系统使用说明书

H厦门海为科技有限公司目录前言 (3)1、阅读说明 (3)2、产品检查 (3)3、关于手册 (3)4、图标说明 (3)第一章安全须知 (4)1、使用时之注意事项 (4)2、使用环境之注意事项 (6)第二章硬体说明及安装 (7)1、使用环境 (7)2、型号说明 (10)3、产品规格 (11)4、电机旋转方向定义 (12)5、基本配线图 (12)6、外形尺寸 (15)7、不同模式下接线图说明 (17)8、接口 (20)9、输入/输出接口类型 (23)第三章操作面板说明 (30)1、操作面板说明 (30)2、功能一览 (32)3、控制状态显示模式 (33)4、报警模式 (34)5、参数编辑模式 (35)6、定位数据编辑模式 (36)第四章运行 (37)1、信号的说明(输入信号的优先顺序) (37)2、运行步骤选择 (38)3、运行确认 (39)4、运行 (40)第五章功能参数说明一览表 (53)1、参数的分类 (53)2、功能参数一览表 (53)第六章功能参数详细说明 (60)1、基本设定参数(P1.01~50) (60)2、控制增益、滤波器设定参数(P1.51~99) (72)3、自动运行设定参数(P2.01~50) (79)4、扩展功能设定参数(P2.51~99) (91)5、输入端子功能设定参数(P3.01~50) (98)6、输出端子功能设定参数(P3.51~99) (110)第七章通讯 (125)1、设定伺服驱动器 (125)2、通信规格 (125)3、传输协议 (126)第八章故障指示及对策 (132)1、检查 (132)2、状态显示 (132)3、报警的处理方法 (133)第九章电机 (139)1、伺服电机产品特点 (139)2、伺服电机型号说明 (139)3、伺服电机参数表 (140)4、贮运 (148)5、接线 (148)第十章选件与辅助设备 (149)1、关于选件 (149)2、驱动器制动标准配置 (149)前言非常感谢您选用Haiwell 伺服驱动器!本手册包括Haiwell 伺服驱动器使用时的操作说明和保养注意事项。
电机正反转控制原理
电机正反转控制原理
电机正反转控制原理是指通过改变电机的输入电压和电流方向,控制电机的旋转方向。
下面将介绍电机正反转控制的基本原理。
首先,我们需要了解电机的构成。
一个典型的直流电机由定子和转子组成。
定子中有一组线圈,称为励磁线圈,它与电源相连。
转子上有一个永磁体或电枢,它可以在磁场中旋转。
正转控制是指将电机旋转方向设置为正向(顺时针)转动。
反转控制则是将电机旋转方向设置为反向(逆时针)转动。
实现电机正反转控制的关键是要能够改变励磁线圈和电枢之间的电流方向。
在电机正转控制过程中,励磁线圈和电枢之间的电流方向应该满足以下条件:励磁线圈与电源正极连接,电枢与电源负极连接。
这样,励磁线圈所产生的磁场和电枢中的磁场会互相作用,引起转子旋转,从而使电机实现正向转动。
在电机反转控制过程中,励磁线圈和电枢之间的电流方向则应该反转:励磁线圈与电源负极连接,电枢与电源正极连接。
这时,励磁线圈和电枢中的磁场方向也发生了改变,导致转子反向旋转,从而实现电机的反向转动。
为了实现电机正反转控制,通常会使用一个电机驱动器或控制器,如直流驱动器或可编程控制器(PLC)。
驱动器或控制器
可以接收来自用户或外部信号的指令,然后根据指令改变电机输入电压和电流的极性,从而控制电机的旋转方向。
总之,电机正反转控制的原理在于改变电机励磁线圈和电枢之间的电流方向,从而改变磁场的方向,进而控制电机的旋转方向。
电机正反转控制通常使用电机驱动器或控制器来实现。
电机正反转工作原理

电机正反转工作原理
电机正反转是指电机能够实现顺时针和逆时针旋转的工作状态。
具体工作原理如下:
1. 电磁感应原理:电机内部一般包含一个固定的磁场和一个可以旋转的线圈。
当通电时,线圈会产生一个磁场,与固定磁场相互作用,导致电机开始运转。
2. 电流方向:电机通过改变线圈中电流的方向,来实现正反转。
当电流方向与磁场方向一致时,线圈受力方向与旋转方向相同,电机顺时针旋转;当电流方向与磁场方向相反时,线圈受力方向与旋转方向相反,电机逆时针旋转。
3. 电机控制:电机的正反转通常是由电路系统中的开关或控制器来实现的。
通过控制电流的流向,可以改变电机的旋转方向。
总结:电机正反转的工作原理是基于电磁感应原理。
通过改变电流方向,可以改变线圈受力的方向,从而使电机实现正反转。
SG-30A伺服说明书
需要断电检修,然后再次通
电。
偏差计数
位置控制方式下〔参数
1-23 器清零 t
CL Type1 P
E
PA4=0〕,位置偏差计数器清 零输入端子。 CLE ON:位置控制时,位置
偏差计数器清零。
速度控制方式下参数
〔PA4=1〕, 选择部 速度时
〔参数 No22=0〕速度选择 1 输入端子,在速度控制方式
PULS+18 PULS- 06
220
SIGN+ 19 SIGN- 07 220
FG 25 机壳地
CN1
17 AOUT+
A
16 AOUT-
B
22 BOUT+ 10 BOUT-
24 ZOUT+
Z
11 ZOUT-
05 CZCOM
02 CZ
伺服电机
2
3
电 机
4
1
02
03 04 07 编 05 码 08 器 06 09
请安装非熔断型断路器〔NFB〕使驱动器故障时能及时切断外部电源。
正确连接电缆屏蔽层。
2.3 考前须知
驱动器 U、V、W 的接线端子必须与电机端子 U、V、W 一一对应, 注意不能用调换三相端子的方法来使电机反转,这一点与异步电动机 完全不同.
由于伺服电机流过高频开关电流,因此漏电流相对较大,电机接地端 子必须与伺服驱动器接地端子 PE 连接一起并良好接地。
开关量输入接口 20 开关量输出接口 20 脉冲量输入接口 21 模拟输入接口 22 编码器信号输出接口 23 编码器 Z 信号集电极开路输出接口 23 伺服电机光电编码器输入接口 24
第 4 章参数 25
4.1 参数一览表 25
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机旋转方向的定义
文献
涉及产品
问题:
电机的旋转方向是如何定义的
解答:
按照DIN EN 60034-8的规定,电机的旋转方向定义如下:
旋转方向是指从电机驱动侧观察的方向
驱动侧是指电机带有输出轴伸的一侧
对于带有双轴伸的电机,驱动侧为:
a) 具有较大轴径的一侧
b) 如果两端轴径相同,是指与风扇相反方向的一侧
标注为顺时针方向的电机从驱动侧看轴为顺时针旋转(观察方向为从驱动侧向非驱动册看)
标注为逆时针方向的电机从驱动侧看轴为逆时针旋转(观察方向为从驱动侧向非驱动册看)
注意:
由于电机和负载机械的旋转方向是以各自的轴伸作为参考的,所以通常需要选择与负载机械相反的方向作为电机的旋转方向。
也就是说,逆时针方向的负载机械需要选择顺时针方向的电机来驱动,顺时针方向的负载机械需要选择逆时针方向的电机来驱动。