简易水位控制器
液位控制器说明

正面侧面背面上面功能和用途本产品采用集成电路,并结合高层楼宇上、下水池(水塔)的水位分级提升进行设计,具有下下水池联合控制、水池排水及缺水保护等功能,可自动实现水箱补水、排水,并有效防止水池水位水高溢出或水泵空转损坏,是一种工业、家庭均适用的产品。
非常适合城镇、农村、学校、式矿企事业单位及家庭用水的水井——水井供水工程,广泛应用于印染、化工、食品、饮料、酿酒、制糖等行业。
性能特征(一)单控上水池控头安装说明安装图如图一所示:D(绿线)、E(黄线)点并接到C。
(二)单控下水池(即排水池)探头安装说明安装图如图二所示:E—为下水池上限液位控制点,水们上升达到E点水位,水与探头接触,水位控制器自动开泵,水池排水;若不排水,则E点不接;D—为下水池下限液位控制点,水位下降到D点水位,水与控头脱离接触,水位控制器自动关泵,水池停止排水;C—为水池地线,放地水池的最低点与水底部接触;A、B点不接。
(三)缺水保护探头安装说明安装图如图三所示:C、D点为水池下限水位控制点,水位下降到下限水位,C、D探头之一与水面脱离接触,水位控制器继电器立即动作,切断输出,水泵停止工作;E点与C点短接;A、B点不接。
(四)上下水池联合控制探头安装说明安装图如图三所示:A—为上水池(水塔)上限液位控制点,水位上升达到A点水位,水与控头接触,水们控制器自动关泵;B—为上水池(水塔)下限液们控制点,水位下降到B点水位以下,水与探头脱离接触,水位控制自动开泵,水池充水;C—为上、下不池(水塔)公用在线,放在上、下水池的最低点与水池底部接触;D—为下水池下限液位控制点,水位下降到D点水位,水与探头脱离接触,水位控制器自动关泵,水池停止排水;E—为下水池上限液位控制点,水位上升到E点水位,水与探头接触,水位控制器自动开泵,水池排头;若不排水,则E点不接。
安装尺寸安装使用其他说明1、为确保液位控制器正常工作,安装好后请再次检查输入输出的接线、探头连接线是否接触可靠。
家用简易液位控制接线图
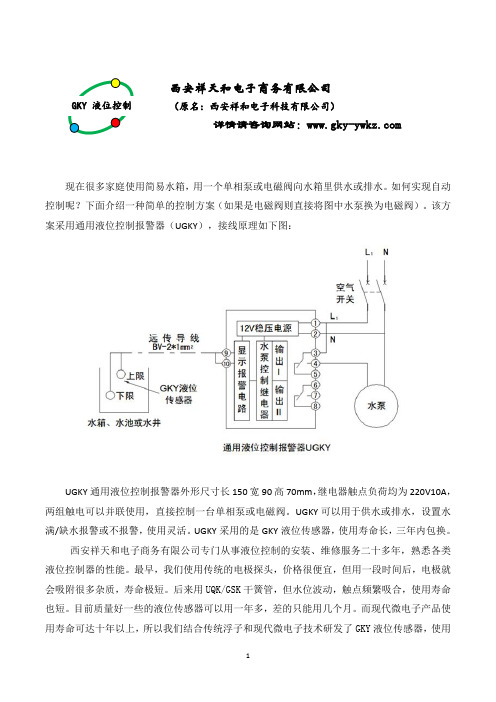
GKY 液位控制现在很多家庭使用简易水箱,用一个单相泵或电磁阀向水箱里供水或排水。
如何实现自动控制呢?下面介绍一种简单的控制方案(如果是电磁阀则直接将图中水泵换为电磁阀)。
该方案采用通用液位控制报警器(UGKY
),接线原理如下图:
UGKY 通用液位控制报警器外形尺寸长150宽90高70mm ,继电器触点负荷均为220V10A ,两组触电可以并联使用,直接控制一台单相泵或电磁阀。
UGKY 可以用于供水或排水,设置水满/缺水报警或不报警,使用灵活。
UGKY 采用的是GKY 液位传感器,使用寿命长,三年内包换。
西安祥天和电子商务有限公司专门从事液位控制的安装、维修服务二十多年,熟悉各类液位控制器的性能。
最早,我们使用传统的电极探头,价格很便宜,但用一段时间后,电极就会吸附很多杂质,寿命极短。
后来用UQK/GSK 干簧管,但水位波动,触点频繁吸合,使用寿命也短。
目前质量好一些的液位传感器可以用一年多,差的只能用几个月。
而现代微电子产品使用寿命可达十年以上,所以我们结合传统浮子和现代微电子技术研发了GKY 液位传感器,使用
西安祥天和电子商务有限公司
(原名:西安祥和电子科技有限公司)
详情请咨询网站:
寿命长,三年内包换。
GKY液位传感器也是目前唯一可以在污水中长期使用的传感器,欢迎登录本公司网站了解详情。
基于单片机的超声波水位控制器的设计

基于单片机的超声波水位控制器的设计一、引言在许多工业和民用领域,如水库、水塔、污水处理厂等,准确监测和控制水位是至关重要的。
传统的水位控制方法往往存在精度低、可靠性差、响应速度慢等问题。
随着电子技术和单片机技术的不断发展,基于单片机的超声波水位控制器应运而生,它具有精度高、响应快、易于实现自动化控制等优点,为水位控制提供了一种更加高效、可靠的解决方案。
二、超声波水位测量原理超声波是一种频率高于 20kHz 的机械波,它在空气中传播时遇到障碍物会发生反射。
超声波水位控制器就是利用这一原理来测量水位的。
控制器通过发射超声波脉冲,并测量从发射到接收反射波的时间间隔,根据声音在空气中的传播速度,就可以计算出传感器到水面的距离。
由于传感器的安装位置是固定的,因此可以通过计算得出水位的高度。
三、系统硬件设计(一)单片机选型在本设计中,选用了_____型号的单片机作为核心控制器。
该单片机具有性能稳定、运算速度快、资源丰富等优点,能够满足系统的控制和数据处理需求。
(二)超声波传感器选择了一款高精度的超声波传感器,其测量范围能够满足实际应用的需求,并且具有良好的稳定性和可靠性。
(三)显示模块为了实时显示水位信息,选用了_____显示模块。
它可以清晰地显示水位高度、报警状态等信息,方便操作人员查看。
(四)按键模块设置了按键模块,用于设定水位的上下限阈值,以及进行系统的参数设置和操作控制。
(五)报警模块当水位超过设定的上下限阈值时,报警模块会发出声光报警信号,提醒操作人员及时采取措施。
(六)电源模块为整个系统提供稳定的电源供应,确保系统的正常运行。
四、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机内部资源的初始化、传感器的初始化、显示模块的初始化等。
然后进入主循环,不断地采集水位数据、进行数据处理和判断,并根据判断结果控制显示模块和报警模块。
(二)数据采集与处理程序通过单片机的定时器和中断功能,精确地测量超声波从发射到接收的时间间隔,并将其转换为水位高度。
PLC水塔水位自动控制
根据实际运行情况,对控制算法 的参数进行优化,提高系统的响 应速度和稳定性。
建立故障诊断机制,快速定位并 排除系统故障,确保水塔水位控 制的可靠性。
04
水塔水位自动控制系统 的实际应用与效果分析
水塔水位自动控制系统的实际应用
实时监测
水塔水位自动控制系统能够实时监测水塔的水位,并将数 据传输到PLC控制器。
01
自动控制
根据预设的水位阈值,系统能够自动控 制水泵的启动和停止,以保持水位的稳 定。
02
03
数据记录与分析
系统能够记录水位数据,并生成报表, 方便用户对水位情况进行统计分析。
水塔水位自动控制系统的效果分析
节能降耗
01
通过自动控制水泵的启停,避免了人工操作的延误和浪费,降
低了能耗。
提高供水稳定性
plc水塔水位自动控制
目录
• 水塔水位控制系统的概述 • PLC在水塔水位控制系统中的应用 • 水塔水位自动控制系统的设计 • 水塔水位自动控制系统的实际应用与效果分析 • 结论
01
水塔水位控制系统的概 述
水塔水位控制的意义
保证供水稳定
水塔作为供水系统的重要环节,保持水位在合理 范围内对于保证供水稳定至关重要。
执行机构
根据PLC控制器的输出信号,执行相应的动 作,如调节阀门的开度或水泵的运行状态。
水塔水位控制系统的基本原理
采集水位数据
通过水位传感器实时监测水塔内的水 位数据。
计算控制信号
执行控制动作
执行机构根据PLC控制器的输出信号, 执行相应的控制动作,调节水流量或 水泵的运行状态,以保持水塔水位的 稳定。
02
系统能够实时监测水位,避免了因水位过高或过低对供水系统
水位控制器说明书-中文1

水PR泵OT保EC护T器OR
WA家TE用R型PUMP 电V压M
电C流M 自A动U 手M动A
复RS位T 设SE置T 启S/T停 DDXXPP-3-300
ON 12
面板说明: 接线说明:
数码管显砂
水泵保护器
家用型
电压
电流
自动
手动
复位 设置 启/停 DXP-30
电压显示指示 电流显示指示 工作在自动状态 工作在手动状态
设定 - 此键用来设定电流,当用户选定电机后用此键来设定电机过电流保护值 1安到30安单键设定,每按一下改变数值。
启动/停止 - 使用此键需将模式开关的2号开关处于手动状态,此时水泵必需用 此键进行启动,启动后工作过程中也可以用此键将水泵停止工作 如果启动后水位达到设定值水泵将自动停止工作,下一次的启动 必需由此键启动。
复位键
启动/停止键
设定键
电源输入
输出 到电机
ON
模式转换开关:
12
1: off: 加水
on: 排水
2: off: 自动
on: 手动
高中低
使用电极棒接线图
ON 12
电源输入 输出接电机
使用浮球开关接线图
ON 12
电源输入 输出接电机
高低 中
面板按键使用说明
复位 - 在任何状态下按下此键产品都将回到开机状态。
欢迎使,蓄水池, 水坑,水塔等用到蓄水控制的水位,并对水 泵的过电压,欠电压和过电流进行保护, 以确保水泵的工作正常.
产品参数: 显示方式:3位LED数码管 工作电源:220VAC±25% 接点电流:电阻30A 电流设定范围:1A至30A 过压:260VAC±1% 欠压:175VAC±1% 过电压时间:10秒 欠压时间:10秒 过电流时间:10秒 恢复时间:3秒 控制方式:电极棒或浮球开关
天津美控液位报警控制器说明书
天津美控液位报警控制器说明书产品概述天津美控液位报警控制器由液位报警装置、液位变送器和消控箱三部分组成。
其中液位显示仪表分别由智能数显表,单,双光柱数显表组成,液位变送器分别由普通型,高温型,耐油型,超声波型,和防腐型组成,能够对所测介质的液体进行实时显示,高低点位信号输出和控制。
被测介质可以是水、油、工业污水、粘稠介质等导电及非导电液体。
能排除液体波动造成的假液位影响。
可广泛运用于供水、炼油、化工、食品、医药、造纸及污水处理等行业的工业远传控制。
在生活或工业生产中,在供给水的方方面面,如果需要其水位远传显示及控制,天津美控液位报警控制器是个选择。
比如自来水厂在制水和供水环节,就需要大量现场水位的实测数据供其生产调试以保证生产过程正常运行。
水厂过滤池上下水位的水位差值的正确测量,是保证水厂水质过滤的关键点之一,由为重要。
在工业生产以及日常生活中,也需要天津美控液位报警控制器配合变频器,对用水对象持续恒压供水,也需要水位传示仪输出的模拟电流信号,好比是变频器装上了眼睛,及时应变水位高低强弱,确保恒定供水。
在消防设施水位的传示由为重要,远在现场的水箱水位,消控值班室无法实时监测,如遇现场水箱无水情况,这会造成较大的安全隐患。
多快的解决方案,就需要安装天津美控液位报警控制器。
产品参数表量程范围:0-200m(水位高)综合精度:0.5%FS输出信号:4-20mA(二线制)供电:24VDC(9~36VDC)亦可12VDC介质温度:0-60℃环境温度:常温(-20~60℃)负载电阻:≤800Ω;绝缘电阻:大于2000MΩ密封等级:IP68工作原理液位探头是基于所测液体静压于该液体的高度成正比的原理,通过传感器将静压转换为电信号,再经过温度补偿和线性修正,转化为标准电信号(如4-20ma等),配置显示控制仪实现现场水位是实时显示及警示。
安装注意点首先从水池(水箱)现场到控制室拉一根二芯线(1.5平方的普通或屏蔽电缆)其传输距离上限为4000m。
简易水位报警器设计

2020.23设计研发简易水位报警器设计毛敏(陕西国防工业职业技术学院,陕西西安,710300)摘要:防汛期间,为了实时监测水位,本文利用两根导线、Arduino Un。
微处理器、蜂鸣器和LED灯为平台设计出实时水位报警系统,通过试验,当水位上升到警戒位置时,报警器进行灯光报警。
本系统具有电路简单、操作简便、耗能低,准确性高等优点。
关键词:Arduino UNO;防汛;水位监测;报警器Design of simple water level alarmMao Min(Shaanxi Institute of Technology,Xi'an Shaanxi,710300)Abstract;During the flood control period,in order to monitor the water level in real time,this paper uses two wires,Arduino uno microprocessor,buzzer and LED lamp as the platfonn to design a real-time water level alarm system.The system has the advantages of simple circuit,simple operation, low energy consumption and high accuracy.Keywords;Arduino Uno;Flood control:water level;monitoring;alarm0引言我国幅员辽阔,地形复杂,季风气候显著,全国约有35%的耕地、40%的人口和70%的工农业生产经常受到江河洪水的威胁,是世界上水灾频发且影响范围较广泛的国家之一。
水灾严重的影响了国民经济的发展,威胁着人类的生存,而且在日常的农业及工业生产中也经常需要我们对液体的水位进行测量。
液位控制器使用方法

(多功能)液位控制器使用手册一、 简介目前,液位控制器大都使用3个不锈钢探头方式,工作原理是测量水的电阻,其弊端是:A、控制器水位传感工作在小电流(微安级)模拟状态,易受电磁干扰造成误动作。
B、输出方式单一,不能与电机综合保护器配合工作,易烧坏给水水泵。
C、控制器本身无水位保护,极易造成水箱溢出跑水。
D、在有上下水箱配合的环境无法工作,构成控制电路困难。
E、由于各地区、各种水质的导电性能不同,而且有些水质由于各种离子的存在,环境易构成原电池,更使电阻式水位控制器工作不稳定。
针对以上问题,一种高性能低价位液位控制器面市,具有如下特点:1、结构简单,性能优良,抗干扰性强,坚固耐用,平均无故障时间长达10年。
自动给水,不用人工管理,节省开支。
2、本控制器为多功能给水控制器,可应用于普通地面水箱、下卧式水箱、上位水箱、压力罐、深井泵等各种给水方式,上下位水箱配合式和压力罐方式可实现24小时给水。
3、操作简单;本控制器能在自动模式下长期稳定运行,在控制箱中可加自动手动运行转换开关,接线简单,工作方便灵活。
4、控制器本身有水位超高保护功能,当由于传感器失灵或其它原因造成水位超过高位水位时能够自动停机并自锁,防止水箱跑水。
5、本控制器工作在低压(DC12V)较大(5~10mA)电流,输入为开关量,不受水质影响,抗干扰能力极强,工作稳定。
6、输出端模拟启动停止按钮方式(2个继电器配合),可以与电机综合保护器配合工作,有效保护水泵电机。
二、 控制器性能1、该控制器为配电箱内安装器件,整机尺寸:纵72mm×横83mm×高113mm,自带导轨卡槽,安装方便。
2、各端子说明。
P1为输出1中点(单刀双掷的中点),P2为输出1常开点,P3为输出1常闭点。
P4为输出2中点(单刀双掷的中点),P5为输出2常开点,P6为输出2常闭点。
P7、P8为220V电源输入。
P9、P15为+12V直流输出,负载能力400mA电流,供外接传感器使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
University of South China电子技术课程设计说明书设计题目:简易水位控制器专业:电气工程及其自动化年级:08级学号:姓名:指导教师:2011年 1 月13日南华大学电气工程学院《电子技术课程设计》任务书设计题目:简易水位控制器专业:电气工程及其自动化电子技术课程设计任务书目录引言 (1)1 系统概述 (1)1.1 任务分析与设计方案确定 (1)1.2 功能模块的划分及其实现方法 (2)1.3 整体方框图及工作原理 (2)2 单元电路设计 (4)2.1 降压整流电路设计 (4)2.1.1工作原理 (4)2.1.2主要元器件参数选择 (5)2.2 控制电路设计 (5)2.2.1工作原理 (6)2.2.2主要元器件参数选择 (9)2.3.1工作原理 (10)2.3.2元件和设备参数选择............................................. - 10 -2.4 电机控制和保护电路设计........................................... - 11 -2.4.1工作原理分析................................................... - 11 -2.5整体元器件清单................................................... - 14 -2.5.1“弱电”部分元器件清单.......................................... - 14 -2.5.2“强电”部分元器件清单.......................................... - 15 -3 设计总结............................................... - 15 -3.1 结论.................................................. 错误!未定义书签。
3.2 本设计方案的优缺点............................................... - 15 -3.3 心得体会......................................................... - 16 -参考文献................................................. - 17 -附录.. (18)摘要本课程设计的简易水位控制器,是对过去理论知识学习的一个实践检测。
基于对555芯片的了解和低压继电器的学习,本设计采用NE555芯片结合继电器和接触器及浮力开关来实现水位的检测与对电机的自动控制和保护。
设计中使用Multisim软件对芯片控制电路进行仿真,并附有仿真结果。
本课程设计说明书,主要介绍了本设计是如何运用数字电子及其他相关技术实现水位的控制,并详细介绍了各功能块的实现方式和原理,以及所用到的元器件等。
关键字:水位控制 NE555 继电器浮力开关数字电子引言本课程设计使用数字电子技术和继电器、接触器等相关知识,实现对水位对电机的控制。
在设计中,由于考虑到设计周期等限制,以及任务的布置,仅仅设计了一个原始系统来达到题目要求,在设计中使用Multisim仿真软件对系统可行性进行分析,并尽可能考虑到在实际运行中可能出现的问题,保证设计出的产品能够正常运行。
但是由于知识和能力有限,其中有诸多不完善之处还需改善。
1 系统概述水位控制器是日常生活中常见的自动化装置。
本课程要求运用数字电子技术等知识设计一台水位控制器。
根据设计要求,此系统采用强弱电结合。
弱电部分由降压整流电路、555触发电路(NE555)、继电器(KA)和浮力开关等组成。
其中降压整流电路为整个控制电路提供直流电压,触发电路NE555根据其触发特性对水塔所处的水位进行检测。
强电部分由熔断器、交流接触器(KM)和电机等设备构成。
1.1 任务分析与设计方案确定本课程设计的主题是设计一个简易水位控制器。
水位控制器是运用电力电子相关技术完成水位的检测和控制电机的启动与关闭,以及故障电机的保护和备用电机的投入等一系列自动化工作。
从任务的控制要求来分析,设计的系统需要在指定的水位实现两台电机的启动与关闭。
水位(低到高H1~H4)与电机的开与关的具体关系如表1-1所示。
由表可知,两台电机在水位下降与上升时从H2到H3的开与关是不同的,所以使用两个芯片分别负责控制两个电机。
在众多芯片中采用NE555芯片构成RS 触发器作为控制部分的核心。
由于控制部分涉及芯片和小功率继电器线圈,所以必须使用小于24V的电压源驱动,而电机电动机要求10KW的功率,必须采用三相异步电机,故需要三相电源驱动。
那么弱电部分可以从220V市电中采用降压变压器取得电能,强电的控制部分可以使用直接从与电机连接的三相电源中引出两相与降压变压器高压端相连的方式获得220V电压。
控制部分还必须对电机拖动部分进行控制,那么可以使用中间继电器做强弱电的桥梁来实现弱电对强电部分的控制。
但对于电机故障和备用电机的投切问题,可以在电机控制部分配置交流接触器结合熔断器来实现该要求。
此外,在水位检测输入端口的设计上,为了保证了检测端口不会受到长期水泡的影响。
故采用金属不锈钢等抗腐蚀材料,和利用浮力原理控制导线闭合的低压器件作为检测端口。
1.2功能模块的划分及其实现方法现根据前文的任务分析,对本设计的功能块划分和实现方式进行具体的阐述。
弱电部分划分如下:(1)降压整流电路:直接总电网供电,通过变压器、整流电路、滤波电路和稳压电路将电网中的220V交流电转换成+12V的直流电压。
(2)控制电路:采用两个NE555芯片分别构成RS触发器作为核心控制部分。
输入端与检测水位的浮力开关相连,输出端与继电器相连。
而中间继电器的作用正是在回路中实现用小电流、低电压来控制大电流、高电压设备。
所以采用小功率中间继电器作为两者的纽带。
(3)水位检测电路:采用市场上流行的浮力开关放置在水塔的指定水位处。
开关两端分别与电源正极和555芯片管脚连接强电部分划分如下:(1)电源电路:课程任务的要求是使用3台10KW水泵电动机,由于电机功率较大,必须采用三相异步电机与电网相连。
电机控制电路则直接从高压端与电网中的两相连的降压变压器获取220V电压。
在每个部分电路与电源直接相接处串联保险丝以保护设备。
(2)电机保护电路:电机有三台,两台为主电机,一台为备用电机。
为了起到保护电机的作用,该电路采用带脱扣器的断路器做过载和短路保护,使用与每相相连的电流互感器与电流继电器并联的方法做断相保护。
(3)电机控制电路:此部分电路中配置熔断器开关和交流接触器线圈来实现相应其他电路对所控制电机的启动与停机以及备用电机的启动。
此外,还设置了手动开关以便实现电机启停的人工操作。
在每个部分电路与电源直接相接处串联保险丝以保护设备(4)电机故障检测与备用电机启动电路:此部分并结合几个继电器和延时继电器的互相配合实现备用电机的投入和故障电机的指示。
同样,在每个部分电路与电源直接相接处串联保险丝以保护设备。
1.3 整体方框图及工作原理(1)本设计的原理方框图如图1-1所示简易水位控制器原理方框图图1-1(2)总体工作原理介绍①水位监测与控制原理:这里仅对M1电机启停控制进行简要分析,M2电1Vcc 机的控制同理可得。
为了叙述方便,以下2、6脚呈高电位是指输入电压呈>3 2Vcc。
和>3当液面低于最低水位H1时,所有的浮力开关都断开,此时NE555芯片的2、6脚都呈低电位,则输出为高电位,此时,两端分别接在NE555芯片输出管脚和地线的继电器(KA1)线圈得电,并带动安装在两台主电机控制部分的常开触点闭合,使得与之串联的交流接触器(KM1)的线圈得电,同时带动其对应的常开触点闭合,使得M1电机和电网相连,电机得以启动。
当水位达到H2后(即浮力开关1、2闭合),NE555芯片的2脚呈高电位,6脚呈低电位,此时输出端状态保持,仍呈高电位,电机保持运转。
当液面高于水位H3时,NE555芯片的2、6脚都呈高电位,输出端电位立即变为0V,使得继电器线圈两端电压为0V,电机控制部分的常开触点复原,使得与之串联的交流接触器(KM1)的线圈无电流通过,导致对应的常开触点断开,使得M1电机和电网断开连接,电机停机。
但液面高于最高水位H4时,浮力开关4闭合,NE555芯片的复位端电位从Vcc立即降为接近0V,使得芯片复位,输出电压为0V,同理可知电机停机。
②电机故障检测与备用电机的投入原理:正常运行的电机出现故障一般是三相短路、过载、缺相。
本设计使用带电磁脱扣器的断路器QF做过载和短路保护,使用电流互感器和电流继电器并联做断相保护。
当任何一个电流继电器得电,使得串联在电机控制电路的常开触点断开;串联在备用电机启动电路的常闭触点闭合(原来线圈带电时是断开的),导致同样在一条支路的继电器(KM)线圈失电,导致与电机与电网相连的继电器触点断开,故障电机停止运转,同时实现了故障的指示和备用电机的启动功能。
2 单元电路设计2.1 降压整流电路设计该部分由降压一个变压器TF1、四个1N4002型的二极管构成桥式整流电路、一个电容C3组成。
其作用是为弱电部分的控制电路提供直流稳压电源。
电路图如图2-1所示。
降压整流电路图图2-12.1.1工作原理原理如图2-2所示。
接通电源后,交流电流经降压整流部分,当输入交流电压为正半周时,对D1、D3加正方向电压,使得Dl、D3导通;对D2、D4加反方向电压,D2、D4截止。
电路中构成Es、Dl、U1、D3通电回路,在U1 ,上形成上正下负的半波整流电压。
Es为负半周时,对D2、D4加正向电压,D2、D4导通;对D1、D3加反向电压,D1、D3截止。
电路中构成Es、D2、U2 、D4通电回路,同样在U2 上形成上正下负的另外半波的整流电压。
由于整流后的直流实际是脉动的,也就是直流的波形不是平直的,因此使用大容量电容并联在电路中,在电压的波峰时储能,在波谷时放能,使脉动的直流电压波形接近平直。
降压整流电路原理图图2-22.1.2主要元器件参数选择(1)降压变压器TF1的选择控制变压器一般用于降低控制部分电路电压,以保证控制电路的安全可靠。
本设计根据以下两个原则选用变压器容量。
1)根据控制电压的最大工作负荷时所需要的功率进行选择,以保证变压器在长期工作时不至于超过允许温升。
2)变压器的容量应能保证部分吸合的电器,在启动其他电器时,仍能可靠吸合,同时又能保证将要启动的电器也能启动吸合。
根据以上原则选择的变压器参数如表2-1所示型号输入电压输出电压输出电流TF66×32 110V/220V 12V 3A (2)滤波电容C3的选择滤波电容的选择适合恰当直接影响到弱电部分电路能否正常运行。