基于51单片机的“扫地机器人”设计报告.pdf
基于C51单片机的蓝牙远程智能扫雷机器人设计
基于C51单片机的蓝牙远程智能扫雷机器人设计唐骁可贺师跨越(空军工程大学电气工程及其自动化专业陕西西安710000)目录特色说明2总体设计2基于单片机的金属探测技术3AD转换原理4超声波测距系统5温度采集系统6无线蓝牙数传模块HC-068MG995舵机9Wifi视频传输模块10控制部分11系统适用范围13特色说明:唯物主义认为,技术决定战术。
社会科技、生产和武器装备的发展,是影响作战方法变革、战争形态变化的最富活力的因素。
那么,现代高技术的发展和应用,使电子战成为决定战争胜负的关键,在现代高技术条件下,如不掌握电子战的优势,就可能丧失战场主动权,很难赢得胜利。
我们开发的基于C51单片机的蓝牙远程智能扫雷机器人正是为了现代化战争中减少人员伤亡,应用于高危场所,以蓝牙为数据传输载体,实现实时控制,视频传输和爆炸物监测,温度采集,测距等功能的智能系统而制作的。
总体设计:此智能扫雷机器人主要通过51单片机进行控制,通过HC-06蓝牙模块与上位机进行通信,由于处理的数据较多所以采用三块单片机最为从机,通信模式采用串口多机通信模式,上位机控制程序采用Visual basic6.0编写,上位机与蓝牙配对后,会新增一个无线串口,在VB中可采用MSComm控件打开无线串口,实现与从机的无线通行,上位机控制程序主要负责通过无线蓝牙串口发送控制指令,并处理从机返回的数据,从机主要负责从上位机接收指令并完成相应的操作,从机控制电机的驱动以达到控制机器人位置的改变,控制DS18B20温度模块采集温度,控制超声波测距模块采集摄像头前方到障碍物的距离,控制舵机的角度改变云台摄像头的视角,控制接近式开关监测机器人下方是否有爆炸物,之后再返回由从机处理完的数据给上位机。
由于视频信息数据量太大所以采用专用的wifi视频传输模块进行视频信息的传输以达到实时监控的目的。
总体设计:设计模块图如图1示:根据图1,本设计需要器件清单见表1。
基于51单片机的清洁装置的设计
基于51单片机的清洁装置的设计摘要:本文的目的是研究清洁装置的数据分析、计算方法、机器组成和设计原理。
基于这些研究成果,我们设计了一款基于51单片机的清洁装置,它能够方便快捷地清洁各种环境,并节约劳动力和资源。
关键词:智能清洁;改进创新;节约资源Cleaning Device Setting Based on 51 Single Chip MicrocomputerLu Hanming,Li Xiang,Yu Ping,Zhang Xueming,Wang Zhiyong,LiYongle,Wang Tao(School of Physics and Electronic Engineering, Linyi University, Linyi 276000, China)Abstract:The purpose of this article is to study the data analysis, calculation methods, machine composition, and design principles of cleaning devices. Based on these research results, we have designed a cleaning device based on a 51 microcontroller, which can conveniently and quickly clean various environments, and save labor andresources.Keywords: intelligent cleaning, improvement and innovation, resource conservati0引言随着城市人口不断增加和建筑物的快速发展,包括办公楼和住宅楼在内的高楼林立。
然而,人们面临一个共同的问题:楼梯的清洁。
基于stc89c51单片机的扫地机器人设计

基于stc89c51单片机的扫地机器人设计作者:陈学谊来源:《科学与信息化》2020年第30期摘要扫地机器人作为一种可代替人类进行房间清扫的家用机器人之一,由于其方便性,因此在目前社会中具有良好的发展前景与运用前景。
本文主要阐述如何设计与制作一个具有自动清扫,自动避障,定时清扫的功能简易扫地机器人。
此扫地机器人由总控制电路,电源电路,定时器电路,及电机驱动电路构成。
本扫地机器人的核心为stc89c52单片机,此单片机运用简单,效率高且成本低,可以良好的实现扫地机器人所需求的基本功能。
本扫地机器人还具有定时功能,可以在一定时间后自动关闭,因此可以到达节约用电的目的。
关键词扫地机器人;自动避障;定时电路;stc89c52单片机概述随着第一台扫地机器人在1997年由瑞典伊莱克斯生产开始,扫地机器人至今已经拥有了二十余年的发展历史。
随着近代科学技术的不断发展与革新,扫地机器人也由最开始的只可以进行简单的清扫功能的傻瓜模式,慢慢发展成了具有许多不同功能,如自动避障功能,路径规划功能,定时清扫功能,语音控制功能等不同功能的智能扫地机器人。
而人们对于扫地机器人的需求程度也越来越高,因此,扫地机器人在我国具有良好的前进。
本文主要从电路设计方面着手,简单讲述如何设计一个由总控制电路,电源电路,电机驱动电路和定时器电路这四大电路构成的简易扫地机器人。
且为了节约制作成本,提高制作效率,我们可以先利用电脑对我们设计的扫地机器人电路进行仿真测试。
其主要设计过程为:理论设计——仿真实验测试——仿真结果分析——电路制作——实物测试——结果分析。
1 总控制电路stc89c52作为应用最为广泛的单片机之一,价格便宜,工作效率高且用于简单,是作为扫地机器人的总控制芯片的最好选择之一。
此单片机拥有四组八位可编程的I/O口,分别为P0口:由P0.0至P0.7的8位双向I/O口线(Pin39-Pin32)。
P1口:由P1.0至P1.7的8位双向I/O口线(Pin1-Pin8)。
51单片机智能机器人实验报告
51单片机智能机器人实验报告智能机器人实验报告电子稿实验一教你的机器人“走路”一、要求与目的熟悉机器人用于走路的“脚”,要教你的机器人学会走路,同时你要掌握控制机器人走路的基本方法。
二、内容1、机器人为什么会“走”要想让机器人移动,就要控制电机的转动。
控制机器人“行走”的基本指令是motor(x,y)函数和drive(x,y)函数。
2、驱动电机的函数通过JC程序控制电机转动,使机器人行走的指令有两个,它们是motor(x,y)函数和drive(x,y)函数,介绍:一、motor(x,y)函数此函数是“启动”电机,x取值1、2,分别表示左右两个电机;y表示电机转速两个电机同时以相同速度启动,意味着什么?机器人将怎样运动?答:机器人将直走。
进一步讨论:如果将一侧电机速度改为0,机器人将会怎样运动?(顺时针、逆时针旋转)答:左侧电机速度为零,则逆时针旋转;反之,则顺时针旋转。
实验题一:让机器人顺时针、逆时针旋转(1)用vjc语言或者流程图让能力风暴顺时针走直径约1米的圆形路径;程序:void main(){while(1){motor( 1 , 80 );motor( 2 , 20 );}stop();}(2)用vjc语言或者流程图让能力风暴逆时针走约1米立方的正方形路径;程序:void main(){while(1){drive( 100 ,0);wait( 1.000000 );stop();motor( 1 , -20 );motor( 2 , 20 );wait( 0.500000 );stop();}}实验题二:首先机器人前进2秒,之后机器人逆时针旋转1.8秒,然后机器人前进1秒,最后停下来。
小结:motor函数主要是实现旋转。
实验代码:Void main(){Drive(60,0);Wait(2.000000);Stop();Drive(0,-60);Wait(1.800000);Stop();Drive(80,0);Wait(1.000000);Stop();}二、drive(x,y)函数此函数是“直行”,x表示基准速度,y表示左右电机与基准速度的差。
单片机控制的智能清洁机器人的设计
单片机控制的智能清洁机器人的设计摘要:介绍了一种基于单片机控制的室内智能清洁机器人,机器人的主控芯片采用AT89C51,由行走机构、传感系统、清洁系统和控制系统四个部分组成,可以在一般的家庭环境下自动运行,完成扫地、吸尘、抹地等工作,代替人完成各种清洁任务。
关键词:单片机控制智能清洁机器人室内地面的清洁工作繁琐耗时,随着现代人生活质量的提高和工作节奏的加快,人们迫切希望摆脱这种枯燥的家务劳动,近年来,用机器人代替人完成清洁工作引起了大家的关注。
室内智能清洁机器人是一种新型的居室小家电产品,它不需要人类的监督,能自主运行,集打扫、吸尘、抹地为一体,可自动避开障碍物等功能。
在日本、美国等发达国家,都在致力于研究和广泛使用这种机器人,但国内的产品相对比较滞后。
当机器人的性价比进一步提高,那么清洁机器人进入家庭将具有广阔的市场前景。
1、室内智能清洁机器人的设计思路清洁机器人主要包括行走机构、传感系统、清洁系统和控制系统四个部分。
行走机构能保证机器人在地面上移动,采用轮式结构。
为了简便起见,选择两个驱动轮和一个万向轮组成。
清洁系统由清扫、吸尘、擦地三步完成,吸尘机构在原理上与传统吸尘器相同,主要考虑是更合理的选择和布置元器件,克服传统吸尘器噪音大的缺点,使机器人工作时,不会对用户造成干扰,营造舒适的居室环境。
在机器人车身的后部设置一个滚刷和垃圾盒,配合吸尘器完成清洁和储存垃圾的工作。
由于单片机性价比高,体积小,控制功能强,故采用单片机来控制清洁机器人,由传感器感知外部环境,这里选择简单又实用的碰撞传感器,单片机接受传感器的信号,感知环境并执行相应的控制程序。
考虑到单片机的容量和计算速度都很有限,采用了碰撞到障碍物就后退一定距离,然后右转90°的方法,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作[2]。
2、实现过程2.1 清洁机器人行走机构清洁机器人行走机构的动力部分采用的是步进电机,机身的正前方有一个万向轮,左右两边分别布置两个后轮,两个步进电机分别通过齿轮传动带动两边的后轮运动。
基于stc89c51单片机的扫地机器人设计
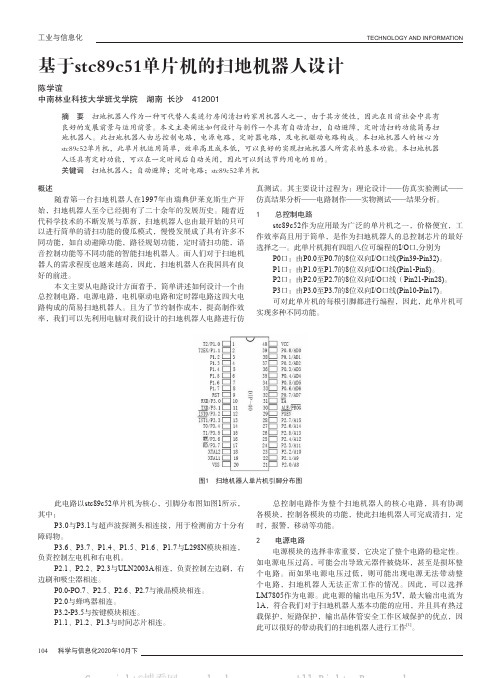
图1 扫地机器人单片机引脚分布图
单片机为核心,引脚分布图如图1所示,与超声波探测头相连接,用于检测前方十分有
L298N模块相连,
相连,负责控制左边刷,右
总控制电路作为整个扫地机器人的核心电路,具有协调各模块,控制各模块的功能,使此扫地机器人可完成清扫,定时,报警,移动等功能。
2 电源电路
电源模块的选择非常重要,它决定了整个电路的稳定性。
如电源电压过高,可能会出导致元器件被烧坏,甚至是损坏整个电路。
而如果电源电压过低,则可能出现电源无法带动整。
基于单片机的智能扫地机器人
第一章概述1.1 智能扫地机器人的研究背景2002年,家电公司伊莱克斯推出的三叶虫智能扫地机器人,颠覆了人们对扫地的概念。
三叶虫扫地机器人作为世界第一款量产的智能扫地机器人,外形采用圆饼形设计,塑料外壳。
在单片机的控制下,底部的车轮能够进行转动,从而控制扫地机器人的主要运动。
采用了仿生技术,按照蝙蝠的超声波技术,使得扫地机器人能够迅速的察觉障碍并且绕开。
从2003年开始,iRobot公司和Proscenic公司推出了一系列的产品,主要技术集中在真空吸尘以及碰撞式运动。
2004年重庆大学智能科学技术研究所与宁波波郎电器有限公司合作开发的室内清洁机器人,能够沿墙壁行走清扫地面。
2007年至今,越来越多的公司推出了一系列的产品,功能也随之越来越丰富。
国产智能扫地机器人方面,有苏州怡凯电器的科沃斯、益节等公司生产的机器人功能丰富,包括非接触式、超声波式、红外线技术、无线遥控等技术。
国产品牌的扫地机器人如浦桑尼克蓝天S、科沃斯DT85G等比较受欢迎。
小米公司生产的米家扫地机器人具有地图生成、路径规划、自动回充、断点续扫等先进技术。
目前扫地机器人有几大关键技术支撑,扫地机器人完成扫地任务分为几个步骤,即定位、构图、规划、清扫。
现在的扫地机器人不仅能够适应复杂的家庭环境,在清洁效果上也是有巨大的提高。
首先是传感器技术,扫地机器人能够在自身传感器的测控下,进行距离的前进以及移动由此可以独自完成清扫任务;室内定位功能,主流的定位系统则是RPS激光定位系统,能够实时定位变化坐标;路径规划技术,扫地机器人根据环境的变化信息,按照自身优化算法,进行合理的路径规划引导;吸尘技术则是通过机械装置进行真空吸尘,形成巨大气流旋涡,进行除尘动作。
1.2 研究的目的与意义智能扫地机器人将移动机器人技术和吸尘器技术有机地结合起来,实现室内环境的全自动清洁,能够代替传统的繁重的人工清洁工作,近几年来已受到国内外的研究人员重视。
作为智能移动机器人的一个特殊应用,从技术方面讲,智能扫地机器人比较具体地体现了移动机器人的多项关键技术,具有较强的代表性。
基于单片机的扫地机器人的设计
Abstract毕业设计题目:基于单片机的扫地机器人的设计副标题:学生姓名:所在系、专业:班级:指导教师:日期:摘要本文主要设计并制作一个简易扫地机器人。
本扫地机器人具有自动清扫、自动充电、防撞、防跌落的功能。
本文介绍了扫地机器人系统总体的设计方案,它主要由MCU 主控电路、防撞电路、防跌落电路、电压检测电路、稳压电路和充电位检测电路组成。
它完全解放了人民的双手,能够全自动完成清扫工作,当电量不足时,自动寻到充电座,进行充电,充满后继续工作本机采用stc89c52单片机为核心控制器件,虽然它是一个入门级的单片机,但成本低,效率高,编写程序简单等优点,在市场上还是有很好的应用前景。
关键字:扫地机器人;壁障;stc89c52单片机AbstractIn this paper, the design and implementation of a simple cleaning robot. The sweeping robot with automatic cleaning, automatic charging, anti-collision, anti drop function. This paper introduces the design scheme of the overall cleaning robot system, which mainly consists of MCU main control circuit, protection circuit, fall protection circuit, voltage detection circuit, voltage stabilizing circuit and a charging position detection circuit. It is completely liberated people's hands, and can automatically complete the cleaning work, when electricity shortage, automatically find charging, charging, full continue to work the machine adopts STC89C52 microcontroller as the core control device, although it is an entry-level microcontroller, but low cost, high efficiency advantages, writing the program is simple, and has good application prospect in the market.Keywords:Sweeping robot,barrier, STC89C52目录摘要 (I)Abstract .......................................................................... I I 目录........................................................................... I II 1、概述. (1)1.1 国内产品研究背景 (1)1.2 研究的目的和意义 (1)1.3 课题的要内容 (1)1.3.1 扫地机器人功能 (1)1.3.2 性能指标 (2)1.3.3 论文的主要内容 (2)2、电路设计、理论分析与计算 (3)2.1 电源电路设计 (3)2.1.1 电路原理 (3)2.2 总控制电路 (4)2.2.1 STC89C52单片机简介 (4)2.2.2 总控制电路的设计 (6)2.3 防跌落电路 (8)2.4 防撞落电路 (10)2.5 电源电压检测电路 (10)2.6 电池充电电路 (11)2.6.1 电池充电电路设计 (11)2.7 电机驱动电路 (12)2.7.1电机的选择 (12)2.7.2电机驱动电路设计 (13)3、PCB板的设计与制作 (16)3.1 PCB板的设计 (16)3.2 PCB板的制作 (17)4、电路焊接与调试 (20)4.1 电路焊接 (20)4.2 防撞电路的调试 (21)4.3 防跌电路的调试 (21)5、系统程序的设计 (21)5.1 C语言与汇编语言的优缺点 (21)5.2 系统程序设计 (22)5.2.1 程序的初始化 (22)5.2.2 主程序的设计 (22)5.2.3 防撞程序的设计 (23)5.2.3 防跌落程序的设计 (24)5.2.4 充电寻迹程序的设计 (25)6、外壳制作 (27)6.1 有机玻璃的特性 (27)6.1 底板制作 (27)6.2 边框制作 (28)6.3 储灰盒制作 (29)7、整机调试与功能介绍 (30)7.1 存在的问题与解决方案 (31)7.2 系统缺陷 (32)7.2.1 传感器缺陷 (32)7.2.2 电池缺陷 (32)7.2.3 吸尘器功率缺陷 (32)7.3 功能说明 (32)8、总结 (33)致谢 (34)参考文献 (35)附录 (36)简易扫地机的设计1、概述1.1 国内产品研究背景在国内的一些大学、如哈尔滨工业大学、华南理工大学、上海交通大学等单位也对清洁机器人进行了大量的研究并取得了一成果,对清扫机器人相关技术如机器感知、机器人导航和定位与路径规划、机器人控制、电源与电源管理、动力驱动等技术的研究则更多,这些都为清洁机器人的研究开发和推广奠定了物质基础和技术基础。