一例永磁同步电动机的转子位置检测故障分析
永磁同步电动机维修的真实案例

永磁同步电动机维修的真实案例1. 案例一:电机无法启动在某工厂的生产线上,一台永磁同步电动机突然无法启动。
经过检查,发现电机的电源线路出现松动,导致电机无法接收到电能。
工作人员重新连接电源线路,电机恢复正常运行。
2. 案例二:电机噪音大某小型企业的永磁同步电动机在运行过程中发出异常的噪音,影响了生产环境。
维修人员检查后发现,电机轴承磨损严重,需要更换。
经过更换轴承,电机噪音问题得到解决。
3. 案例三:电机温度过高一家制造业企业的永磁同步电动机在运行一段时间后,温度明显升高。
经过检查,发现电机内部的散热风扇故障,无法正常散热。
维修人员更换了故障的散热风扇,电机的温度恢复正常。
4. 案例四:电机震动严重在某家物流公司的永磁同步电动机中,电机在运行过程中出现了明显的震动现象,导致工作不稳定。
经过检查,发现电机转子不平衡,需要进行动平衡处理。
维修人员对电机进行了动平衡处理,解决了电机震动的问题。
5. 案例五:电机速度不稳定一台永磁同步电动机在运行时,速度不稳定,影响了机器的工作效率。
经过检查,发现电机控制系统中的速度传感器出现故障,无法准确感知电机的运行速度。
维修人员更换了故障的速度传感器,电机的速度恢复稳定。
6. 案例六:电机启动困难某企业的永磁同步电动机在启动时出现了困难,需要多次尝试才能正常启动。
经过检查,发现电机的起动电容器老化失效,需要更换。
维修人员更换了起动电容器,电机的启动困难问题得到解决。
7. 案例七:电机频繁断电一台永磁同步电动机在运行过程中频繁断电,导致工作不稳定。
经过检查,发现电机的电源线路存在接触不良的问题,需要重新连接。
维修人员重新连接电源线路,电机的断电问题得到解决。
8. 案例八:电机转速异常在某工业设备中,一台永磁同步电动机的转速异常,无法达到预期的工作效果。
经过检查,发现电机控制器中的转速反馈信号传感器损坏,无法准确感知电机的转速。
维修人员更换了损坏的传感器,电机的转速恢复正常。
新能源汽车永磁同步电机运转异常故障分析
Internal Combustion Engine &Parts故障类型故障原因供电类型电机不转动力电池包无直流输出:1.电池电压过低;2.整车高压部件存在漏电;3.电池管理系统故障。
高压/低压电机控制器不输出三相电:1.电机控制器供电、搭铁异常;2.档位信号异常;3.油门踏板无输入信号;4.制动信号不正常;5.通讯异常;6.旋变信号异常。
高压/低压电机转动缓慢1.旋变信号异常;2.三相交流电缺相。
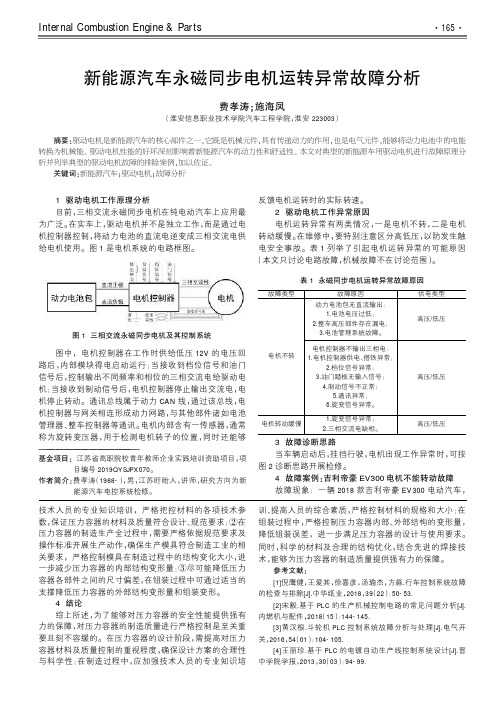
高压/低压表1永磁同步电机运转异常故障原因1驱动电机工作原理分析目前,三相交流永磁同步电机在纯电动汽车上应用最为广泛。
在实车上,驱动电机并不是独立工作,而是通过电机控制器控制,将动力电池的直流电逆变成三相交流电供给电机使用。
图1是电机系统的电路框图。
图中,电机控制器在工作时供给低压12V 的电压回路后,内部模块得电启动运行;当接收到档位信号和油门信号后,控制输出不同频率和相位的三相交流电给驱动电机;当接收到制动信号后,电机控制器停止输出交流电,电机停止转动。
通讯总线属于动力CAN 线,通过该总线,电机控制器与网关相连形成动力网路,与其他部件诸如电池管理器、整车控制器等通讯。
电机内部含有一传感器,通常称为旋转变压器,用于检测电机转子的位置,同时还能够反馈电机运转时的实际转速。
2驱动电机工作异常原因电机运转异常有两类情况,一是电机不转,二是电机转动缓慢。
在维修中,要特别注意区分高低压,以防发生触电安全事故。
表1列举了引起电机运转异常的可能原因(本文只讨论电路故障,机械故障不在讨论范围)。
3故障诊断思路当车辆启动后,挂挡行驶,电机出现工作异常时,可按图2诊断思路开展检修。
4故障案例:吉利帝豪EV300电机不能转动故障故障现象:一辆2018款吉利帝豪EV300电动汽车,———————————————————————基金项目:江苏省高职院校青年教师企业实践培训资助项目,项目编号2019QYSJPX070。
诊断永磁同步电机转子初始位置检测结果的方法[发明专利]
![诊断永磁同步电机转子初始位置检测结果的方法[发明专利]](https://img.taocdn.com/s3/m/9c39e582561252d381eb6ebd.png)
专利名称:诊断永磁同步电机转子初始位置检测结果的方法专利类型:发明专利
发明人:管希铭,吴平仿,王双全,黄洪剑
申请号:CN201710791700.0
申请日:20170905
公开号:CN109428530A
公开日:
20190305
专利内容由知识产权出版社提供
摘要:本发明公开了一种诊断永磁同步电机转子初始位置检测结果的方法,本方法首先使电机运行至稳态,保持输入q轴电流i=0;增大电机转速ω,输入d轴电流i,并在一定的范围内改变i的值,同时检测d轴的电压U;如果U仅在趋近于零的范围内小幅度的变动,证明启动前转子初始位置检测准确;反之,如果U的值不断的增大或减小,说明转子初始位置的检测结果存在偏差,需停机重新检测以校正误差。
本方法验证转子初始位置检测的准确性并校正可能存在的误差,提高转子位置检测的精度,达到最大化电机输出转矩,提高电机运行的稳定性。
申请人:上海大郡动力控制技术有限公司
地址:201114 上海市闵行区浦江镇新骏环路188号1号楼
国籍:CN
代理机构:上海天协和诚知识产权代理事务所
代理人:沈国良
更多信息请下载全文后查看。
永磁同步电机的转子磁极位置辨识方法综述

L2 sin 2 s ˆd s i Rs L1 L2 cos 2 s
(2.17)
ˆd s i Rs L1 L2 cos 2 s 2 us s Rs 2 Rs L1 s L1 L2 L1 L2 s 2
华南理工大学 自动化学院 游林儒教授实验室文档
PMSM 转子磁极位置静止型学习方法研究
华南理工大学 黄招彬 2013-3-15 Email: abinhill@ 永磁同步电机(PMSM)的起动与矢量控制需要知道转子磁极的当前位置(相对于 A 相/ 轴) 。本文针对永磁同步电机的转子磁极初始位置辨识,研究了利用 PMSM 凸极效应或饱和凸 极效应的几种磁极位置辨识方法,包括相等脉冲宽度电压注入法、高频正弦电压注入法和高频 旋转电压注入法。 1. 前言 永磁同步电机中编码器(增量式或绝对式)的安装一般如图 1.1 所示,电机的定子(含线 圈)与编码器的定子固定在一起,电机的转子(含永磁体)与编码器的转子固定在一起(含零 位信号 Z 或者 R) 。设电机定子的静止坐标系参考为 A 相绕组,定为 轴,同时设编码器定子 的静止参考为 A ,可记 1) 2) 3) 4) (变化) ; NA 为矢量控制的解耦角度(转子磁极 N 极位置到 轴之间的电气角)
NZ 为转子磁极 N 极位置到编码器转子零位信号 Z 之间的机械角(固定) ;
; ZA 为编码器转子零位信号 Z 到编码器定子静止参考 A 之间的机械角(变化) 。 AA 为编码器定子静止参考 A 到电机定子 A 相/ 轴之间的机械角(固定)
设电机的极数为 P ,即极对数为
P ,则有 2
的时间,最后时刻的 d 轴电流峰值在转子磁极方向与其反向时达到最大值。由式(2.10) (2.11) 可知,当施加相同伏秒数(电压乘以时间)时,时间越短(对应电压越高) ,定子电阻影响越小。
永磁同步电机转子初始位置检测及启动策略
永磁同步电机转子初始位置检测及启动策略Initial Rotor Position Detection and Start-up Strategy of Permanent Magnet SynchronousMotor大连交通大学电气信息学院丁志勇(Ding Zhiyong)转子位置检测是永磁同步电机控制系统稳定运行的必要条件,使用增量式编码器不能准确得到转子的初始位置信息,直接启动会产生未知后果,通常需要额外的初始位置检测方法。
本文分析了在未知电机转子初始位置时直接启动可能出现的情况,提出一种基于增量式编码器A、B脉冲信号的转子初始位置检测方法,并在启动过程中完成增量式编码器的校正。
实验结果表明,该方法简单有效。
关键词: 永磁同步电机;增量式编码器;转子初始位置;编码器校正Abstract: Rotor position detection is a necessary condition for the stable operation of the permanent magnet synchronous motor control system. Using the incremental encoder can not obtain the accurate information of the initial rotor position. Direct start-up will produce unknown consequences, so it usually requires additional initial position detection method. This paper analyzes the possible situation of direct start-up in the case of unknown the motor initial rotor position, and proposes a rotor initial position detection method based on A and B pulse signals of the incremental encoder, completes correction of incremental encoder in the process of starting-up. Experimental results show that the method is simple and effective.Key words: PMSM; Incremental encoder; Initial rotor position; Encoder correction【中图分类号】TM351 【文献标识码】B 【文章编号】1561-0330(2019)02-0073-041 引言永磁同步电机具有功率密度高、结构简单以及调速性能好等优点,在工业领域得到广泛的应用[1]。
永磁同步电机转子初始位置检测

上式中,转子角速度由ω指代,当它的取值为
因高频电压信号从电机绕组中通过,故而,可对定子电阻压降进行忽略,进一步得出定子电压方程和电流响应信号等[1]。
将高频旋转电压信号持续注入定子绕组中,即可得出三相静止坐标系中的电压,分别用U和ωh对高频电压信号幅值和角频率进行表示,继而依托3/2将其变换至两相
由上式可知,三相高频电流响应信号都是两个同频率正弦信号差,同频率正弦交流电压相加其性质不变,而幅值影响因素则是两个信号各自的幅值和相位差。
已知电机参数和高频注入信号的情况下,θ能调制三相高频电流响应信号幅值。
三相高频电流响应信号幅值与θ角变化规律相关,与正弦规律类似。
三相高频电流响应信号幅值变化幅度与电机凸性成正比。
倘若提取位置信息时使用查表方法,无论是注入高频电压信号幅值,还是角频率都会对该操作产生干扰,反之,
轴电感会随之减小,
图1定子磁势影响d轴磁路
由上述已知条件,对电机d轴电流表达式予以确定:
得出结论:i d与L sd成反比,L sd越大,i d越小。
该背景下,分别将同等时间和幅值的脉冲电压注入到不同的位置和(θ+π),继而对两次响应电流幅值进行检测和比较,得出转子位置角[3]。
3实验结果分析
采用一台内嵌式永磁同步电机,对永磁同步电机转子初始位置检测方法进行验证,分别将其额定电压和额定功。
永磁同步电动机转子位置检测方法

et a o fh t oio yP L p ael kl p )adtem aue n f ohr u urn , h e sr s m t no emo r s i b L ( h s c o s n es r t te s r t te no— i i t o p tn o o h me o m b c e s
(. 1 哈尔滨理工大学 电气与 电子工程学 院 , 黑龙江 哈尔滨 10 4 2 深圳 国际技术创新研究 院 , 50 0; . 深圳 广东 58 5 ) 107
3 1芯 片运 动控 制 引擎 专用控 制模 块 的分析 , 用锁 相环 结构 对转 子 位 R F4 采
DU Ku — i , L h n y , L Y n me V C u —u U u , S Ja —o g U iny n
( . col f l tcl n lc oi E gneig 1 Sho o e r a a dEet nc n ier ,HabnUnvri f c n eadT cnlg ,H ri 10 4 ,C ia E ci r n ri iesyo i c n eh ooy abn 0 0 hn t Se 5 2 I ei t S e ze eh— noai nent nlS eze 10 7, hn ) .l tue h nh nT c in vtnItrai a,hnh n5 85 C ia n t o o
P M 转子 位 置和速 度 的估 计 , MS 这种 方 法算 法 复 杂 , 计算 量 相 当大 ; 同时 某 些 基 于 观 测器 的估 计 方 法 需 要用 到 许多 随机 误差 的统 计参 数 , 由于 模型 复杂 , 涉 及 因素 较 多 , 得分 析这 些参 数 的工作 比较 困难 . 使 通 过 给 电机注入 高 频 电压 , 检 测 其相 应 的 电流 来 获 并
交流永磁同步电机转子位置的检测

文 覃 绸 号 ;0 35 5 (0 1 0 -0 80 1 0— 8 O 2 1 ) 904 - 3
21 0 1年
交 流 永磁 同步 电机转 子 位 置 的检 测
De e to f Ro o s to o t c i n o t r Po ii n f r AC r a e a ne i m y hr no s M ot r Pe m n nt M g ts S nc o u o
子 位 置定 位 ,使 交流 永磁 同步 电机 能稳 定运 转 。通过 样机 验证 ,结果表 明,该 方法 可 以满足 实际使 用 的要 求 ,实
现 了交流 永磁 同步 电机 稳定 运 转 。
【 键词 】 交流 永磁 同步 电机 ,转子 位 置 ,T 3 O 2 1 ,复合 式光 电 编码 器 关 MS 2 F 8 2
r n i g o h u n n ft e AC e ma e tma n ts s n h o o smo o . p r n n g e i m y c r n u t r
KEYW ORKDS AC PM S ,r t r p s t n, TM S3 0 8 2 h b i a i g e c d r M o o o ii o 2 F2 1 , y rd g t n o e n
i d s ra u o to s e ta o s i e t h n u t ila t ma i n e s n i lc n t u n ,t e AC e ma e tm a n ts s n h o o s mo o ss i b eb t n q eme i f rt e t p r n n g e i m y c r n u t ri u t l y isu i u rt o h a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
般需要安装光 电编码器、 旋转变压器等位置传感器
来获得电动机转子的准确位置。由于安装 的误差会使 位置传感器的零位产生偏差 , 位置传感器的零位偏差
将造 成转子 位置检 测 的零 位 偏 差 , 电动 机 转 子检 测 而 零位 偏差 的存 在 引起逆 变器 开关 管 逻 辑 换 向错 误 , 将 引起 不期望 和不可 控制 的轴 电流 , 重 时 会 造成 电动 严
与机械 脱开 , 动器 “ 能 ” 电动 机仍 旧转 2 。 出 驱 使 后 0后
1 故障现象
一
台配套 SE N 0 D 系统 、1U IME S82 6 1 e伺 服 驱 动
现 E一 0 68报 警利 用 S oC m 软 件 联 机 观 察 i oU m
6 1 e驱动 器上伺 服 电动 机 工作 电流 , 现 电动 机慢 1U 发 慢转 动 时 , 电动机 电流不断增 大 , 后突 然增大超 过 电 最 动机 最 大电流 P 8设定 的 2 把最 大 电流 增 大时 10 1 7A, 观察 电动机 工 作 电流 仍 然超 过 电 动机 最 大 电流 设 定
值。用新的电动机更换后观察也出现同样的故障。由
于驱 动器是 好 的 , 的电动机也 不应该 有 问题 , 新 问题 出 在哪儿 呢 ?分 析并 回忆维 修过 程发现有 可能 是驱 动器 与 电动机 问的相 序不 对 造 成 。把 电动 机 动力 线 还原 , 使其 与 驱动器 的相序 一一对 应 , 试机 电动机工作 正 常。 再 利 用 Sm o U 软件 联 机 观 察 6 e驱 动 器 上伺 ioC m 1 l U 服 电动 机工作 电流 , 实际 电流 只有 1A左右 , 因此相序
器输出达到极限。根据机床资料要求检查驱动器与电 动 机和编码 器 的连接 、 电动机 接地 连接 、 编码器 类型及
脉 冲数 的设 定 、 检查 机 械 负 载情 况 及更 换 驱 动 器功 率 模块 或控 制 模 块 故 障 等 等 。检 查 机 床 驱 动 器 与 电动 机 、 动器 与 C C的连接 , 驱 N 确认位 置反 馈极 性 、 置反 位 馈 连接 均正确 。 电动机编码 器 与电动 机 的连 接也 没发 现松动 。编码器 的类 型及 脉 冲数 的设 定 也 正确 。z、 y 轴 共用一 个双轴 驱动 模 块 , 了判 断 驱 动 器是 否 有 故 为
拆卸该编码器的时候没有做编码器轴与电动机轴的安
装 零位标 记就 直接把 编码 器拆卸 下来 。调整 电动机刹 车间 隙使 其刹 车效 果 良好 后试 机 , 动器 “ 能 ” z 驱 使 后 轴 出现 飞车 。出现此 现象 的原 因可能是编 码器安 装 的 零位 偏差 造成 电动机转 子位 置检测 的零位 偏差 引起不 期望 和不 可控制 的轴 电流 , 造成 电动机无 法正常转 动 。 因此 为 了纠正较 大 的零 位偏差 , 交换 电动机 动力 线 V、
L ANG Yi UN i I ,S J
(ntueo cieyMa uatr gT c nlg C iaA a e yo Istt f i Mahn r n f ui eh o y, hn cd m f c n o E g er gP yi Mina g6 10 , HN) ni e n h s s, a yn 2 9 0 C n i c
R g dae c 洲n n in e ma 改装与维修 aM n
一
例永磁同步 电动机 的转子位 置检测故障分析
梁 毅 孙 继
( 中国工程 物理研 究院机 械制造 工 艺研 究所 , 四川 绵 阳 6 10 ) 2 90
A o be An lss o o o o io e e t n o MSM Tr u l ay i fR t rP st n D t ci fP i o
机无法启动或转动。转子位置零位偏差即位置传感器
的零位偏 差 , 它是指 位 置传 感 器相 对 于 转 子实 际位 置 的偏差 。下面 分析一 例 由于编码 器 的安 装误差 引起 的 电动机 非正常 工作 。
w 两相 , 驱动器“ 使能” 后不 出现飞车, 但伺服 电动机 只转动约 2 。 0后驱动器就出现 E 6 8 一0 报警。把电动机
永磁 同步 电动 机 , 因其 效 率高 、 积 小 、 体 调速 性 能 良好得 到广泛应 用 。在伺服 系统 等高精 度控制 的场 合
一
此类故 障 刹 车不 能完 全 松 开 也 可 能 使 电动 机 负 载 增
大, 因此没有把电动机和机械脱开进行 电动机空转试 验, 就直接把电动机从机床上拆卸下来进行电动机刹
错误造成新 电动机非正常工作。把新 电动机与 z轴
丝杠 连接 , 移 动 06 m 后驱 动器 又 出现 E一 0 z轴 .2m 68 报警 。再次 让 电动机脱 开机械 , 工作 正常 , z轴 因此机
障, z y 把 、 轴电动机动力线及反馈线交换 , 结果 y轴 运 动正常 、 z轴还是 不能 移动 , 因此排 除 驱动 器本 身故 障。天车吊起主轴配重 , 配重链能 自由地上下移动 , 因 此也不怀疑除电动机外 的机械故障。根据经验判断 ,
的数控铣床 , z轴移动 06 m时出现 A M 850 .2m L 300 报
警 ,1 e伺服驱 动 出现 E 68  ̄ 警 。 6 1 U 一0#
2 故障查找
A M 850报警 的含义 是 P O IU P驱 动 器 L 300 R FB SD 连接 出错 ; 一 0 E 6 8报警 的含义 是 z轴 驱动 器 速度 调 节
; z 年 幂 u1 u z 朋
械有故障。钳工经过分析检查发现主轴配重的拖链轴 承因滚珠研碎卡死不转。更换该轴承后 , 故障全部排