反电动势过零点检测法的研究[1]
反电动势过零点检测
反电动势过零点检测引言在电力系统中,反电动势过零点检测是一项重要的技术,用于判断交流电源波形的零点位置。
它的应用广泛,包括电力传输、工业自动化、电动机控制等领域。
本文将介绍反电动势过零点检测的原理、方法和应用。
原理反电动势(Back Electromotive Force, BEMF)是指当一个感应线圈中的磁场发生变化时,在线圈中产生的自感电动势。
在交流电源中,根据正弦波特性,当交流信号经过零点时,磁场的变化率最大,因此反电动势也会达到峰值。
通过检测反电动势过零点,可以准确判断交流信号波形的相位和频率。
方法1. 零点比较法零点比较法是最常用的反电动势过零点检测方法之一。
它基于对比输入信号与参考信号之间是否存在差异来判断过零点位置。
具体步骤如下: 1. 选择一个合适的参考信号源,并将其与输入信号进行比较。
2. 当输入信号与参考信号之间的差异达到设定的阈值时,判断为过零点。
2. 零序电流法零序电流法是一种通过检测电路中的零序电流来判断过零点位置的方法。
它基于交流电源在过零点时,电路中的零序电流最大。
具体步骤如下: 1. 在待检测的线路中加入一个合适的传感器,用于检测线路中的零序电流。
2. 监测传感器输出信号,并通过峰值检测或均值检测等方法,确定零序电流最大值对应的时间点。
3. 零相位比较法零相位比较法是一种通过比较输入信号与延迟后的信号之间相位差来判断过零点位置的方法。
具体步骤如下: 1. 将输入信号进行延迟处理,使其与原始信号存在一定时间差。
2. 比较延迟后的信号与原始信号之间是否存在相位差。
3. 当相位差达到设定阈值时,判断为过零点。
应用反电动势过零点检测在许多领域都有广泛应用。
1. 电力传输在电力传输系统中,反电动势过零点检测被用于同步发电机和电网之间的相位同步。
通过准确判断交流信号波形的过零点位置,可以确保发电机与电网之间的相位差最小,从而提高能量传输效率。
2. 工业自动化在工业自动化系统中,反电动势过零点检测被广泛应用于驱动控制系统。
无刷直流电机反电势过零检测新方法
无刷直流电机反电势过零检测新方法摘要:采用的无位置传感器的无刷直流电机在高速反应阶段,由于电磁场效应产生的反电势信号过于强大,造成的检测电路无法正常工作,甚至会因为反电势而产生无法弥补的损坏。
相反在低速运转阶段低电势信号较弱,从而无法进行捕捉检测。
基于此,提出一种解决在极端速段问题的反电势过零检测新方法。
经过试验验证,采用三相采样等效电路,在该电路上并联一组晶体管来控制电阻分压器开关电路。
参照电机的特性,可以根据特性调整控制信号的信噪比和占空比,从而实现晶体管的通断进而调节电阻分压开关所形成的电阻值的变化,避免电势过高出现检测危险或者是电势过低检测不出来的问题。
关键词:无刷直流电机引言无刷直流电机具备以下几个特点:体积小、质量轻、效率高、损耗小。
因为这些优点使得无刷直流电机得以广泛的应用,从而进入了航空、控天、机械、汽车等各个工业领域,同时也进入了空调、冰箱、电动汽车等日常生活领域。
按照常理来说,无刷直流电机一般是通过位置传感器来实现确定电机中转子部件的位置,但是这也会出现一个问题,安装位置传感器得不偿失、消耗巨大,使得系统成本大大提高,同时也使得相对简单的系统变得复杂。
在遇见突发情况的时候,对于特殊情况的抗干扰能力会大大降低,可靠度变低。
基于以上的问题,在文章中提出一种适应低俗运转阶段能够有效改善现有的反电势过零检测状况的新方法,它能够在高速运转阶段保护原有电路不受电势过高产生的损害。
一、反电势过零中运用到的基本原理采用的无位置传感器大多是运用了两两导通和三三导通两个工作方式。
这两种方式具有多种特点。
两两导通中采用无刷直流电机在随意的时刻都有亮相电源导通,梁歪一箱电源缠绕着出于半空中。
三三导通则是每一个逆变瞬间都使用三个功率相同的元部件来进行导电。
在文章中将使用前者方式,功率开关管着六个开关组合,每个六分之一的周期进行一次轮换,每次仅更换一个功率开关组合,每个功率开关导通的电度角为120度。
电机采用顺时针的态势时,将所使用的转子按照360度电度角进分布在六个区域中,不同区域会采用不同的功率组合。
直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正
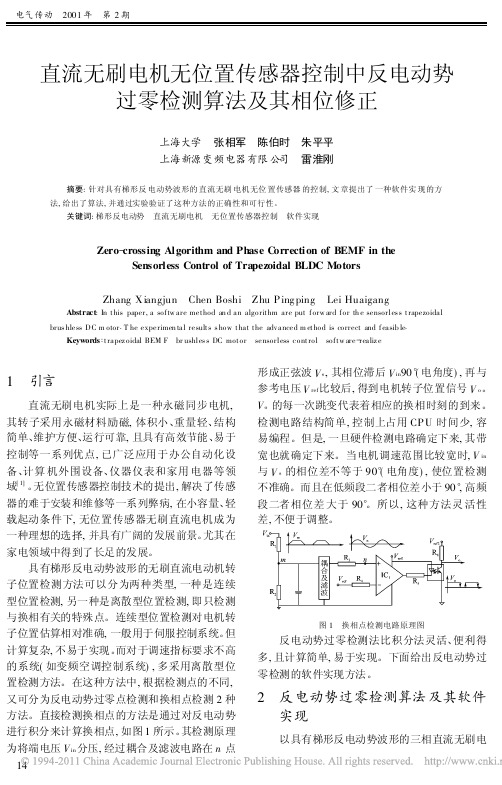
直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正上海大学 张相军 陈伯时 朱平平上海新源变频电器有限公司 雷淮刚 摘要:针对具有梯形反电动势波形的直流无刷电机无位置传感器的控制,文章提出了一种软件实现的方法,给出了算法,并通过实验验证了这种方法的正确性和可行性。
关键词:梯形反电动势 直流无刷电机 无位置传感器控制 软件实现Zero-crossing Algorithm and Phase C orrection of BEMF in theSensorless Control of Trapezoidal BLDC MotorsZhang Xiangjun Chen Boshi Zhu Ping ping Lei Huaigang Abstract:In this paper,a softw are method an d an algorithm are put forw ard for th e sensorles s trapezoidal brus hless DC m otor.T he experimen tal results s how that the advanced m ethod is correct and feasib le.Keywords:trapez oidal BEM F br ushles s DC motor sensorless control softw are-realiz e1 引言直流无刷电机实际上是一种永磁同步电机,其转子采用永磁材料励磁,体积小、重量轻、结构简单、维护方便、运行可靠,且具有高效节能、易于控制等一系列优点,已广泛应用于办公自动化设备、计算机外围设备、仪器仪表和家用电器等领域[1]。
无位置传感器控制技术的提出,解决了传感器的难于安装和维修等一系列弊病,在小容量、轻载起动条件下,无位置传感器无刷直流电机成为一种理想的选择,并具有广阔的发展前景。
直接反电动势法原理与过零点检测方法
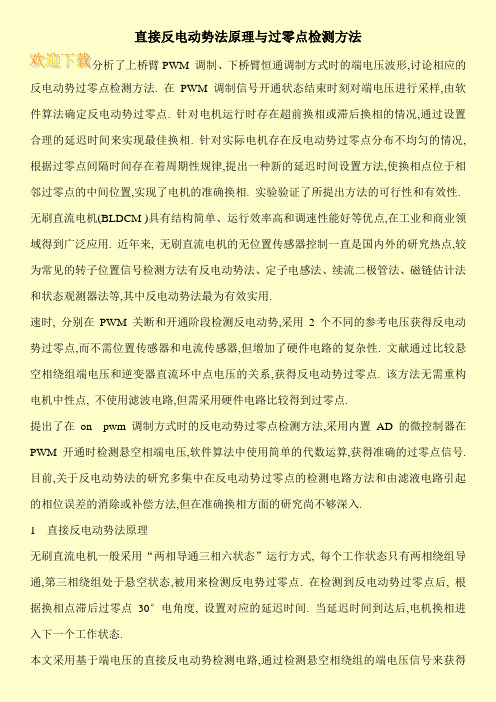
直接反电动势法原理与过零点检测方法分析了上桥臂PWM 调制、下桥臂恒通调制方式时的端电压波形,讨论相应的反电动势过零点检测方法. 在PWM 调制信号开通状态结束时刻对端电压进行采样,由软件算法确定反电动势过零点. 针对电机运行时存在超前换相或滞后换相的情况,通过设置合理的延迟时间来实现最佳换相. 针对实际电机存在反电动势过零点分布不均匀的情况,根据过零点间隔时间存在着周期性规律,提出一种新的延迟时间设置方法,使换相点位于相邻过零点的中间位置,实现了电机的准确换相. 实验验证了所提出方法的可行性和有效性. 无刷直流电机(BLDCM )具有结构简单、运行效率高和调速性能好等优点,在工业和商业领域得到广泛应用. 近年来, 无刷直流电机的无位置传感器控制一直是国内外的研究热点,较为常见的转子位置信号检测方法有反电动势法、定子电感法、续流二极管法、磁链估计法和状态观测器法等,其中反电动势法最为有效实用.速时, 分别在PWM 关断和开通阶段检测反电动势,采用2个不同的参考电压获得反电动势过零点,而不需位置传感器和电流传感器,但增加了硬件电路的复杂性. 文献通过比较悬空相绕组端电压和逆变器直流环中点电压的关系,获得反电动势过零点. 该方法无需重构电机中性点, 不使用滤波电路,但需采用硬件电路比较得到过零点.提出了在on _pwm 调制方式时的反电动势过零点检测方法,采用内置AD 的微控制器在PWM开通时检测悬空相端电压,软件算法中使用简单的代数运算,获得准确的过零点信号. 目前,关于反电动势法的研究多集中在反电动势过零点的检测电路方法和由滤液电路引起的相位误差的消除或补偿方法,但在准确换相方面的研究尚不够深入.1直接反电动势法原理无刷直流电机一般采用“两相导通三相六状态”运行方式, 每个工作状态只有两相绕组导通,第三相绕组处于悬空状态,被用来检测反电势过零点. 在检测到反电动势过零点后, 根据换相点滞后过零点30°电角度, 设置对应的延迟时间. 当延迟时间到达后,电机换相进入下一个工作状态.本文采用基于端电压的直接反电动势检测电路,通过检测悬空相绕组的端电压信号来获得。
直流无刷电机反电动势过零检测方法汇总

直流无刷电机反电动势过零检测方法汇总The Standardization Office was revised on the afternoon of December 13, 2020直流无刷电机反电动势过零检测方法一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的平均转矩,在一个电角度周期中,具有6个换相状态。
在任意一个时间段中,电机三相中都只有两相导通,每相的导通时间间隔为120°电角度。
例如,当A相和B相已经持续60°电角度时,C相不导通。
这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为换相。
换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。
通过判断不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。
反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比较,以得到反电动势的过零点。
但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。
与上面的方法相比,更为常用的是虚拟中点电压法。
假设A相和B相导通,则A和B两相电流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动势的过零点。
这种方法十分简单,实现也比较方便。
但是,由于无刷直流电机按一定频率进行PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地电平之间的变化。
这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精确性。
同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。
这样,在一个PWM周期中,电枢绕组相电流就必然存在断续状态。
反电动势过零点的检测方法

反电动势过零点的检测方法一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的平均转矩,在一个电角度周期中,具有6个换相状态。
在任意一个时间段中,电机三相中都只有两相导通,每相的导通时间间隔为120°电角度。
例如,当A相和B相已经持续60°电角度时,C相不导通。
这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为换相。
换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。
通过判断不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。
广告插播信息维库最新热卖芯片:IPS022G FZT953TA LT1108CN8MC74LCX16245DTR2XPC105ARX66CD PDC20265R TPA6011A4PWPR QMV585CT5MX7224LCWN PI5C3306L反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比较,以得到反电动势的过零点。
但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。
与上面的方法相比,更为常用的是虚拟中点电压法。
假设A相和B相导通,则A和B两相电流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动势的过零点。
这种方法十分简单,实现也比较方便。
但是,由于无刷直流电机按一定频率进行PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地电平之间的变化。
这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精确性。
同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。
反电动势检测原理【最新】

2)三段式起动法的优缺点
(1)三段式起动过程的成功实现.受电机负载转矩、外施电压、加速曲线及转动惯量等诸多因素影响。在轻载、小惯量负载条什下.三段式起动过程一般能成功实现.但在切换阶段往往运行不平稳;当电机重载时.切换阶段往往会发生失步导致起动失败;
(2)当“反电势信号”与外同步信号相位差过大时.三段式起动可导致电机失步.即使能避免失步,也必然导致切换时电机转矩较小.易受干扰。
具体实现方法如下:首先为预定位.即不管转子在什么位置,给电机一个确定的通电状态.电机定子合成磁势在空间上有一确定方面.用一足够长的时间把转子磁极拖到与定子合成磁势轴线重合的位置,实现预定位。其次为起动阶段.按照所需的转向依次改变逆变器功率器件的触发组合状态,同时用“端电压法,,检测各触发组合状态所对应的开路相的反电势过零点,并通过提高PWM占空比逐渐提高电机的外施电压。各触发组合状态的持续时间最大值保持不变,设为T。。与自控式状态一样,用计数器进行计时,换流时刻固定在T。/2处,换流后对开路相的感应电势过零点进行检测,只要检测到开路相的反电势过零点,计数器就重新复位,到T。/2后再换流,这样依次进行,最后,如果连续N次检测到开路相的反电势过零点,就切换到自控式状态,时序图
基于反电动势过零检测法的无刷直流电机控制原理

基于反电动势过零检测法的无刷直流电机控制原理一、引言随着科技的发展,无刷直流电机在各个领域得到了广泛的应用,如家用电器、汽车、工业机械等。
传统的无刷直流电机控制方法存在着诸多问题,如控制精度不高、响应速度慢、寿命短等。
为了解决这些问题,本文提出了一种基于反电动势过零检测法的无刷直流电机控制原理。
本文将从原理、实现方法和优缺点三个方面进行详细的阐述。
二、原理1.1 反电动势过零检测法的基本原理反电动势过零检测法是一种通过检测电机运行过程中反电动势信号的过零点来实现电机控制的方法。
当电机正常运行时,由于转子与定子的相对运动,会在定子绕组中产生一系列的反电动势信号。
这些信号的大小和相位都是有规律的,可以通过对这些信号进行处理,提取出有用的信息,进而实现电机的控制。
1.2 反电动势过零检测法的具体实现反电动势过零检测法的具体实现主要包括以下几个步骤:(1) 传感器安装:在电机的转子上安装一个传感器,用于检测反电动势信号。
传感器的选择应考虑其灵敏度、稳定性和抗干扰能力等因素。
(2) 信号采集:将传感器采集到的反电动势信号通过电缆传输到控制器中。
为了减小信号失真,通常需要在传输过程中加入一定的滤波措施。
(3) 信号处理:对采集到的信号进行处理,提取出有用的信息。
这包括计算信号的幅值、相位和频率等参数,以及判断信号是否过零等。
(4) 控制算法设计:根据处理后的信号信息,设计相应的控制算法。
常用的控制算法有PID控制、模糊控制和自适应控制等。
1.3 无刷直流电机控制系统的结构基于反电动势过零检测法的无刷直流电机控制系统主要由三部分组成:传感器、控制器和执行器。
其中,传感器负责采集电机运行过程中的反电动势信号;控制器根据处理后的信号信息,设计相应的控制算法,并输出控制指令;执行器接收到控制指令后,驱动电机按照预定的轨迹运行。
三、实现方法2.1 传感器的选择与安装在选择传感器时,应充分考虑其灵敏度、稳定性和抗干扰能力等因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绕组的相电压大小等于其反电动势,所以采用图3所 示的电路检测时,反电动势的检测方程组为:
烄Ea=Ua 烅Eb=Ub 。 ………………………………… (12) 烆Ec=Uc
图 3 相 电 压 检 测 电 路
由图3可知,不需要计算电动机的中性点,因为 当采用相电压检测电路检测反电动势时,可以直接检 测到相电压。检测到 反 电 动 势 过 零 点 后, 再 推 迟 30° 电角度即为无刷直流电动机的换相点。最后按照一定 顺序切换相应的功率开关完成对电机的控制。 3 结 论
反电动势过零点检测方法方便、灵活,且可以减少 硬件上的成本,其作为一种有效的检测转子位置的方法 对无刷直流电机控制系统的发展有着重要的影响[6]。
参考文献: [1] 张深.直 流 无 刷 电 机 原 理 及 应 用 [M].北 京:机 械 工 业 出
版 社 ,1996. [2] 胡 少 轶.无 刷 直 流 电 机 无 位 置 传 感 器 控 制 器 系 统 研 究
每相输出端对地电压为 Ux(x = a,b,c), 也 就 是 通 常所说的端电压。
图 1 定 子 端 等 效 电 路 图
由图1可以得到三相端电压方程如下:
Ua=Ria+Lddita+Ea+Un 。 ……………… (1)
Ub=Rib+Ldditb+Eb+Un 。 ……………… (2)
Uc=Ric+Ldditc+Ec+Un 。 ……………… (3)
端电压是指绕组端部至电源负端之间的电压,电 动机的反电动势不便于直接测量,所以用端电压法间 接检测电动机反电动势的过零点。采用三相六状态、 星型绕组连接时,电枢绕组的每一个时刻只有二相导 通,另一相处于断开状态,此时该断开相绕组的相电 压就是反电动势。无刷直流电动机定子端等效电路图 如图1所示。其中,相电感为 L, 相电阻为 R, 反电 动势为 Ex,电 动 机 定 子 绕 组 中 性 点 对 地 电 压 为 Un,
ZHAO Qi
(School of Mechanical Engineering and Automation,North University of China,Taiyuan 030051,China) Abstract:This paper describes the brushless DC motor back-electromotive force (EMF)zero-crossing detection method,proposes two kinds of back-EMF zero-crossing detection method which are teminal voltage method and phase voltage method,and gives the further instruction on terminal voltage method and phase voltage method. Key words:brushless DC motor;back-EMF zero-crossing detection;terminal voltage;phase voltage
由于采用的是三相六状态、星型连接,因此在绕
组中每一时刻只有两相导通,剩余的另一相中无电流
流过。假 设 绕 组 在 某 一 时 刻 只 有 a、b 两 相 导 通,c
相 则 无 电 流 , 所 以ic=0。 则 式 (3)可 以 改 写 为 : Ec=Uc-Un 。 ……………………………… (4) 由于ic=0,ia+ib+ic= 0, 可 以 得 到ia= -ib,
大 连 理 工 大 学 ,2009:16-19. [6] 罗隆福,杨艳,方 日 杰.无 刷 直 流 电 动 机 中 有 待 深 入 研 究
的 主 要 问 题 [J].微 电 机 ,2002,35(1):15-16.
Research on Back-EMF Zero-crossing Detection
即a、b 两 相 电 流 大 小 相 等, 方 向 相 反,Ea = -Eb。 将 式 (1)与 式 (2)相 加 可 以 得 到 中 点 电 压 Un :
Un=
1 2
(Ua
+Ub)
。
…
……
…
……
…
……
…
(5)
櫜 山西省教育厅高校科技开发项目 (2010116) 收 稿 日 期 :2011-12-12 作 者 简 介 : 赵 奇 (1987- ),男 ,山 西 临 汾 人 ,在 读 硕 士 研 究 生 ,研 究 方 向 :先 进 制 造 技 术 。
[D].西 安 :西 安 理 工 大 学 ,2008:13-17. [3] 贡俊,陆国林.无刷直流 电 机 在 工 业 中 的 应 用 和 发 展 [J].
微 特 电 机 ,2000(5):15-19. [4] 梅妮,尹华杰.反电势法在无刷 直 流 电 机 位 置 检 测 中 的 应
用 [J].研 究 与 交 流 ,2006(1):44-48. [5] 张漩.BLDCM 无位置传感 器 控 制 系 统 的 研 究 [D].大 连:
· 166 ·
机 械 工 程 与 自 动 化 2012年第1期
再 将 式 (5)代 入 式 (4)可 以 得 到c 相 反 电 动 势 过 零 点检测公式:
Ec=Uc-
1 2
(Ua
+Ub)
。
……………………
(6)
同理可以得到a 相、b 相 的 反 电 动 势 过 零 点 检 测
Ec=Uc0-
1 2
(Ua0+Ub0)
。
…………………
(9)
Ea
=Ua0-
1 2
(Ub0
+Uc0)
。
……………… (10)
Eb=Ub0-
1 2
(Ua0+Uc0)
。
……………… (11)
图 2 端 电 压 检 测 电 路
2 相 电 压 法 相电压是指相绕组两端的电压,即绕组端部和中
性点之间的电压。相电压检测电路如图3所示。根据 电路的对称性原理,U0 与 图 1 中 所 标 注 的 Un 相 同, 即U0=Un。所以图3 中 的 检 测 信 号 实 际 上 反 映 了 相 电压的大小。假设在某一时刻某相绕组断电,则该相
公式:
Ea
=Ua
-
1 2
(Uc+Ub)
。
…
…
…
…
…
…
…
…
(7)
Eb
=Ub-
1 2
(Ua
+Uc)
。
……………………
(8)
该无刷直流电动机采 用 的 调 速 控制,所以在实际检测电路中,需要先
将电压分压,随后经过滤波得到检测信号。端电压检
测电路 如 图 2 所 示。 其 中,Ua0、Ub0、Uc0 为 检 测 信 号,此时检测 电 路 的 O 点 与 外 接 电 压 Us 负 极 相 连。 因 此 式 (6)、式 (7)、式 (8)转 化 为 :
传感器检测法和无位置传感器检测法两种,其中位置 传感器检测法主要采用霍尔传感器、电磁式位置传感 器、光电式位置传感器检测转子位置;无位置传感器 的检测方法主要是通过检测电动机中电压值、电流值 等能够测量到的物理量间接地估计转子的位置。目前 位置估计方法主要有磁链观测器法、续流二极管电流 检测法和反电动势检测法等,使用最为广泛的是反电 动势 法 。 [1,2] 这 种 方 法 在 无 刷 直 流 电 动 机 正 常 运 行 时,忽略电动机电枢的反应,通过检测关断相反电动 势的过零点来获得永磁转子的关键位置信号,从而可 以控制绕组电 流 的 切 换, 实 现 电 动 机 的 运 转 。 [3,4] 在 反电动势过零检测方法中根据检测电动势过零点方法 的不同可以分为端电压法和相电压法,本文将对这两 种方法进行介绍。 1 端 电 压 法 [5]
摘要:主要介绍了无刷直流电动机采用的反电动势过零点检测法。提出了用端电压法、相电压法两种反电动 势过零点检测法检测电机转子位置,并对端电压法和相电压法做了进一步的说明。 关键词:无刷直流电机;电动势过零点检测;端电压;相电压 中 图 分 类 号 :TM303.3 文 献 标 识 码 :B
0 引 言 无刷直流电机转子位置的检测方法主要分为位置
第1期 (总第170期) 2012 年 2 月
机械工程与自动化 MECHANICAL ENGINEERING & AUTOMATION
文 章 编 号 :1672-6413(2012)01-0165-02
No.1 Feb.
反电动势过零点检测法的研究櫜
赵 奇
(中北大学 机械工程与自动化学院,山西 太原 030051)