《汽车网络技术课件》PPT幻灯片
合集下载
车载网络技术PPT课件(共8章)第2章 CAN总线
(3)波分多路复用
波分多路复用 WDM(Wave-length Division Multiplexing)是指在光波频 率范围内,将不同波长的光波按照一定的时间间隔在同一条光导纤维内进行数据 传输的技术。
2.2 CAN总线的工作原理
2.2.1 CAN总线简介
CAN是Controller Area Network(控制器局域网)的缩写,是国际标准化 的串行通信协议。目前,CAN总线是汽车网络系统中应用最多、也最为普遍的一 种总线技术。
图2-8 计算机系统内总线线路的示意图 1—地址总线;2—数据总线;3—控制总线;CPU—中央处理器;
ROM—只读存储器;RAM—随机存储器;I—输入;O—输出
图2-9 车用计算机(电子控制单元)电路板 1—输出模块;2—输入模块;3—存储器模块;4—微处理器; 5—线圈;6—电容器;7—二极管;8—特殊模块 (特定应用)
第2章 CAN总线
2.1 数据信号及其传输
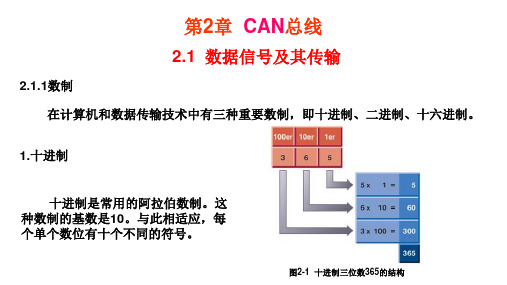
2.1.1数制 在计算机和数据传输技术中有三种重要数制,即十进制、二进制、十六进制。
1.十进制
十进制是常用的阿拉伯数制。这 种数制的基数是10。与此相适应,每 个单个数位有十个不同的符号。
图2-1 十进制三位数365的结构
2.二进制
二进制是数据处理中最常用的数制之一。在二进制中只有两个数字值:0 和1, 或接通或关闭,或高电压或低电压,即所谓的二进制符号或位。在通信领域,也把这 两个值称为逻辑0和逻辑1。
数字表示方式就是以数字形式表
示不断变化的物理量。尤其在计算机 内,所有数据都以“0”和“1”的序列 形式表示出来(二进制)。因此, “数字”是“模拟”的对立形式。
图2-4 数字信号 U—电压;t—时间
3.二进制信号
波分多路复用 WDM(Wave-length Division Multiplexing)是指在光波频 率范围内,将不同波长的光波按照一定的时间间隔在同一条光导纤维内进行数据 传输的技术。
2.2 CAN总线的工作原理
2.2.1 CAN总线简介
CAN是Controller Area Network(控制器局域网)的缩写,是国际标准化 的串行通信协议。目前,CAN总线是汽车网络系统中应用最多、也最为普遍的一 种总线技术。
图2-8 计算机系统内总线线路的示意图 1—地址总线;2—数据总线;3—控制总线;CPU—中央处理器;
ROM—只读存储器;RAM—随机存储器;I—输入;O—输出
图2-9 车用计算机(电子控制单元)电路板 1—输出模块;2—输入模块;3—存储器模块;4—微处理器; 5—线圈;6—电容器;7—二极管;8—特殊模块 (特定应用)
第2章 CAN总线
2.1 数据信号及其传输
2.1.1数制 在计算机和数据传输技术中有三种重要数制,即十进制、二进制、十六进制。
1.十进制
十进制是常用的阿拉伯数制。这 种数制的基数是10。与此相适应,每 个单个数位有十个不同的符号。
图2-1 十进制三位数365的结构
2.二进制
二进制是数据处理中最常用的数制之一。在二进制中只有两个数字值:0 和1, 或接通或关闭,或高电压或低电压,即所谓的二进制符号或位。在通信领域,也把这 两个值称为逻辑0和逻辑1。
数字表示方式就是以数字形式表
示不断变化的物理量。尤其在计算机 内,所有数据都以“0”和“1”的序列 形式表示出来(二进制)。因此, “数字”是“模拟”的对立形式。
图2-4 数字信号 U—电压;t—时间
3.二进制信号
汽车车载网络技术基础PPT课件
第三阶段(1991—2005年):汽车电子设备广泛应 用16位或32位字长的微处理器进行控制,控制技术向智能化 方向发展。其主要产品有发动机燃油喷射与点火综合控制系统、 牵引力控制系统、区域网络通信系统、四轮转向控制系统、轮胎 气压控制系统、声音合成与识别系统、自动防追尾碰撞系统和自 动驾驶系统等。
上一页 下一页 返回
任务一了解汽车电子控制技术
底盘电子控制包括悬架的电子控制、防抱死制动控制(AB S)、驱动防滑控制(ASR)、电子控制动力转向(EPS)、 四轮转向(4WS)控制、巡航控制(CCS)系统等。
车身电子控制包括安全气囊电子控制、车用空调控制、防盗 系统、门锁控制、车灯控制、雨刷控制等。
48为代表,该系列单片机无串行口,其寻址范围不大于4K。 这个阶段生产的单片机已经能够在单块芯片内集成有8位中央处 理器、随机存取存储器、只读存储器、并行输入/输出接口、8 位定时器/计数器等功能部件,但性能低、品种少,应用范围也 不广。
上一页 下一页 返回
任务二 掌握MCS-51单片机的结 构和原理
随着汽车油耗法规、排放法规、安全法规要求的提高和电子技术 的进步而逐步发展到当今的水平。世界汽车电子控制技术的发展 过程大致可分为分立电子元件控制、集成电路控制和微型计算机 控制3个阶段。
下一页 返回
任务一了解汽车电子控制技术
第一阶段(1953—1980年):汽车电子设备主要采 用分立电子元件组成电子控制器,从而揭开了汽车电子时代的序 幕,并由分立电子元件产品向集成电路IC产品过渡。其主要产 品有二极管整流式交流发电机、电子式电压调节器、电子式点火 控制器、电子式闪光器、电子式间歇刮水控制器、晶体管收音机、 数字时钟等。
出现的历史并不长,它的产生和发展与微处理器大体上同步,其 发展过程通常可以分为以下几个阶段。
上一页 下一页 返回
任务一了解汽车电子控制技术
底盘电子控制包括悬架的电子控制、防抱死制动控制(AB S)、驱动防滑控制(ASR)、电子控制动力转向(EPS)、 四轮转向(4WS)控制、巡航控制(CCS)系统等。
车身电子控制包括安全气囊电子控制、车用空调控制、防盗 系统、门锁控制、车灯控制、雨刷控制等。
48为代表,该系列单片机无串行口,其寻址范围不大于4K。 这个阶段生产的单片机已经能够在单块芯片内集成有8位中央处 理器、随机存取存储器、只读存储器、并行输入/输出接口、8 位定时器/计数器等功能部件,但性能低、品种少,应用范围也 不广。
上一页 下一页 返回
任务二 掌握MCS-51单片机的结 构和原理
随着汽车油耗法规、排放法规、安全法规要求的提高和电子技术 的进步而逐步发展到当今的水平。世界汽车电子控制技术的发展 过程大致可分为分立电子元件控制、集成电路控制和微型计算机 控制3个阶段。
下一页 返回
任务一了解汽车电子控制技术
第一阶段(1953—1980年):汽车电子设备主要采 用分立电子元件组成电子控制器,从而揭开了汽车电子时代的序 幕,并由分立电子元件产品向集成电路IC产品过渡。其主要产 品有二极管整流式交流发电机、电子式电压调节器、电子式点火 控制器、电子式闪光器、电子式间歇刮水控制器、晶体管收音机、 数字时钟等。
出现的历史并不长,它的产生和发展与微处理器大体上同步,其 发展过程通常可以分为以下几个阶段。
《车联网介绍》课件
《车联网介绍》PPT课件
车联网是指通过无线通信技术将汽车与互联网连接起来,实现车与车、车与 路网的实时通信。这个介绍课件将带您了解车联网的定义、发展历史、行业 应用、技术原理、优势和挑战以及未来发展趋势。
车联网的定义
车联网是一种通过无线通信技术将汽车与互联网连接起来的系统。它使得车 辆能够实现车与车之间的通信,并且与路网、交通设施、智能终端等进行信 息交换。
智能导航
基于车辆位置和交通状况的实时导航,提供最佳 路线选择。
车辆安全
自动驾驶技术和车辆间通信可以减少事故发生的 可能性。
车辆维护
远程监控的技术原理
车辆通信网络
车辆通信网络包括车到车 (V2V)、车到基础设施(V2I) 和车到云(V2C)的通信。
感知和感知技术
车联网的发展历史
1
2010年
2
欧洲开始推动车联网的发展,致力于提
供更智能的交通管理和服务。
3
2002年
美国实施车联网的早期试点,主要关注 车辆安全和交通流量监测。
2017年
全球车联网市场规模迅速增长,各大汽 车厂商纷纷推出连接汽车。
车联网的行业应用
交通管理
通过实时数据监测和交通流量控制,提高交通效 率和安全性。
大数据分析
车辆通过传感器和相机感知路况、 障碍物等信息,实现自动驾驶和 安全功能。
通过分析车辆和交通数据,提供 智能导航、交通管理和车辆维护 等服务。
车联网的优势和挑战
• 优势:提高交通安全、减少拥堵、节能环保、提供个性化服务。 • 挑战:隐私和数据安全、标准和合规、成本和技术成熟度。
车联网在未来的发展趋势
1 5G技术
5G的推广将为车联网提供更快速、更可靠的数据传输。
车联网是指通过无线通信技术将汽车与互联网连接起来,实现车与车、车与 路网的实时通信。这个介绍课件将带您了解车联网的定义、发展历史、行业 应用、技术原理、优势和挑战以及未来发展趋势。
车联网的定义
车联网是一种通过无线通信技术将汽车与互联网连接起来的系统。它使得车 辆能够实现车与车之间的通信,并且与路网、交通设施、智能终端等进行信 息交换。
智能导航
基于车辆位置和交通状况的实时导航,提供最佳 路线选择。
车辆安全
自动驾驶技术和车辆间通信可以减少事故发生的 可能性。
车辆维护
远程监控的技术原理
车辆通信网络
车辆通信网络包括车到车 (V2V)、车到基础设施(V2I) 和车到云(V2C)的通信。
感知和感知技术
车联网的发展历史
1
2010年
2
欧洲开始推动车联网的发展,致力于提
供更智能的交通管理和服务。
3
2002年
美国实施车联网的早期试点,主要关注 车辆安全和交通流量监测。
2017年
全球车联网市场规模迅速增长,各大汽 车厂商纷纷推出连接汽车。
车联网的行业应用
交通管理
通过实时数据监测和交通流量控制,提高交通效 率和安全性。
大数据分析
车辆通过传感器和相机感知路况、 障碍物等信息,实现自动驾驶和 安全功能。
通过分析车辆和交通数据,提供 智能导航、交通管理和车辆维护 等服务。
车联网的优势和挑战
• 优势:提高交通安全、减少拥堵、节能环保、提供个性化服务。 • 挑战:隐私和数据安全、标准和合规、成本和技术成熟度。
车联网在未来的发展趋势
1 5G技术
5G的推广将为车联网提供更快速、更可靠的数据传输。
车载网络技术(2)PPT课件
•确定由实际要使用的LLC子层接收哪一个报文。
•为恢复管理和过载通知提供手段。
MAC子层的作用主要是传送规则,也就是控制帧结构、 执行仲裁、错误检测、出错标定、故障界定。位定时的一些 普通功能也可以看作是MAC子层的一部分。
物理层的作用是在不同节点之间根据所有的电气属性进行 位的实际传输。物理层定义信号是如何实际地传输的,因此 涉及到位时间、位编码、同步的解释。技术规范没有定义物 理层的驱动器/接收器特性,以便允许根据它们的应用,对 发送媒体和信号电平进行优化。
控制单元之间的数据交换就是通过这两条导线来完成的, 这些数据可能是发动机转速、油箱油面高度及车速等。
2.2 CAN协议分层结构和功能
逻辑链路子层LLC
接收滤波
超载通知
恢复管理
数 据 介质访问控制子层MAC
链
数据包装/解包
路 层
帧编码
介质访问管理
错误监测
出错标定
应答
串并转换
物 理
位编码/解码 位定时
层
同步
驱动器接收器特性
监控器 故障界定 总线故障管理
逻辑链路控制子层(LLC)的作用范围如下:
•为远程数据请求以及数据传输提供服务。
2.信息路由 在CAN系统中,一个CAN节点不使用有关系统结构的
任何信息(如站地址)。包含一些重要概念: 系统灵活性——节点可在不要求所有节点及其应用层
改变任何软件或硬件的情况下,被接于CAN网络。 多点传送——由于采用了报文滤波,所有节点均可接
收报文,并同时被相同的报文激活。 数据相容性——在CAN网络内,可以确保报文同时被
二、CAN总线的基本原理
CAN总线是一种串行数据通信协议, 其 通信接口中集成了CAN协 议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包 括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
•为恢复管理和过载通知提供手段。
MAC子层的作用主要是传送规则,也就是控制帧结构、 执行仲裁、错误检测、出错标定、故障界定。位定时的一些 普通功能也可以看作是MAC子层的一部分。
物理层的作用是在不同节点之间根据所有的电气属性进行 位的实际传输。物理层定义信号是如何实际地传输的,因此 涉及到位时间、位编码、同步的解释。技术规范没有定义物 理层的驱动器/接收器特性,以便允许根据它们的应用,对 发送媒体和信号电平进行优化。
控制单元之间的数据交换就是通过这两条导线来完成的, 这些数据可能是发动机转速、油箱油面高度及车速等。
2.2 CAN协议分层结构和功能
逻辑链路子层LLC
接收滤波
超载通知
恢复管理
数 据 介质访问控制子层MAC
链
数据包装/解包
路 层
帧编码
介质访问管理
错误监测
出错标定
应答
串并转换
物 理
位编码/解码 位定时
层
同步
驱动器接收器特性
监控器 故障界定 总线故障管理
逻辑链路控制子层(LLC)的作用范围如下:
•为远程数据请求以及数据传输提供服务。
2.信息路由 在CAN系统中,一个CAN节点不使用有关系统结构的
任何信息(如站地址)。包含一些重要概念: 系统灵活性——节点可在不要求所有节点及其应用层
改变任何软件或硬件的情况下,被接于CAN网络。 多点传送——由于采用了报文滤波,所有节点均可接
收报文,并同时被相同的报文激活。 数据相容性——在CAN网络内,可以确保报文同时被
二、CAN总线的基本原理
CAN总线是一种串行数据通信协议, 其 通信接口中集成了CAN协 议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包 括位填充、数据块编码、循环冗余检验、优先级判别等项工作。