哈工程自控考研大纲
最新自动控制原理精品资料哈尔滨工程大学大学自动控制原理辅导班笔记

自动控制原理辅导班讲义一、 自动控制理论的分析方法:(1)时域分析法;(2)频率法;(3)根轨迹法;(4)状态空间方法;(5)离散系统分析方法; (6)非线性分析方法 二、系统的数学模型(1)解析表达:微分方程;传递函数;脉冲传递函数;频率特性;脉冲响应函数;阶跃响应函数 (2)图形表达:动态方框图(结构图);信号流图;零极点分布;频率响应曲线;单位阶跃响应曲线时域响应分析一、对系统的三点要求:(1)必须稳定,且有相位裕量γ和增益裕量g K(2)动态品质指标好。
p t 、s t 、r t 、σ% (3)稳态误差小,精度高 二、结构图简化——梅逊公式 例1、解:方法一:利用结构图分析:()()()()[]()()[]()s X s Y s R s Y s X s R s E 11--=+-=方法二:利用梅逊公式 ∆∆=∑=nk KK P s G 1)(其中特征式 (11),,1,1+-+-=∆∑∑∑===Qf e d f e dMk j kjNi i L L LLL L式中: ∑i L 为所有单独回路增益之和∑jiLL 为所有两个互不接触的单独回路增益乘积之和∑fedLL L 为所有三个互不接触的单独回路增益乘积之和其中,k P 为第K 条前向通路之总增益;k ∆ 为从Δ中剔除与第K 条前向通路有接触的项; n 为从输入节点到输出节点的前向通路数目 对应此例,则有:通路:211G G P ⋅= ,11=∆特征式:312131211)(1G G G G G G G G ++=---=∆则:3121111)()(G G G G P s R s Y ++∆=例2:[2002年备考题]解:方法一:结构图化简继续化简:结果为其中)(s G =…方法二:用梅逊公式[]012342321123+----=∆H G G H G G G H G G通路:1,1321651=∆=G G G G G P1232521,H G GG P +=∆= 1,334653=∆=G G G G P于是:()()......332211=∆∆+∆+∆=P P P s R s Y(1)参考输入引起的误差传递函数:()HG Gs R s E 2111)(+=; 扰动引起的误差传递函数:()()HG G H G s N s E 2121+-=(2)求参考输入引起的稳态误差ssr e 时。
哈工大控制考研大纲
哈工大控制考研大纲
哈尔滨工业大学控制考研大纲包括以下几个部分:
1. 考试要求:要求考生全面掌握控制原理的基本概念和基础理论,并具有运用基本概念和基础理论分析问题与解决问题的能力。
2. 考试内容:
控制系统的数学描述:包括控制系统的运动方程式、传递函数、方框图及其简化、信号流图、状态空间描述等。
线性连续控制系统的分析:包括线性系统的时域法、根轨迹法、频域法、状态空间法、李雅普诺夫稳定性方法(含非线性情形)等。
线性离散控制系统的分析:包括线性系统的离散化、脉冲传递函数、线性离散控制系统的分析与设计等。
非线性系统的分析:包括相平面法、描述函数法等。
线性连续控制系统的综合:包括PID控制规律、控制系统的校正、线性系统的状态空间综合法等。
3. 试卷结构:考试时间180分钟,满分150分。
题型结构包括概念题、计算题、分析(或应用、或推证)题等。
以上信息仅供参考,如需哈尔滨工业大学控制考研大纲的详细内容,建议查阅哈尔滨工业大学研究生招生官网或咨询其招生办老师。
哈尔滨工程大学工程控制理论2007考试大纲
附件四:考试大纲格式
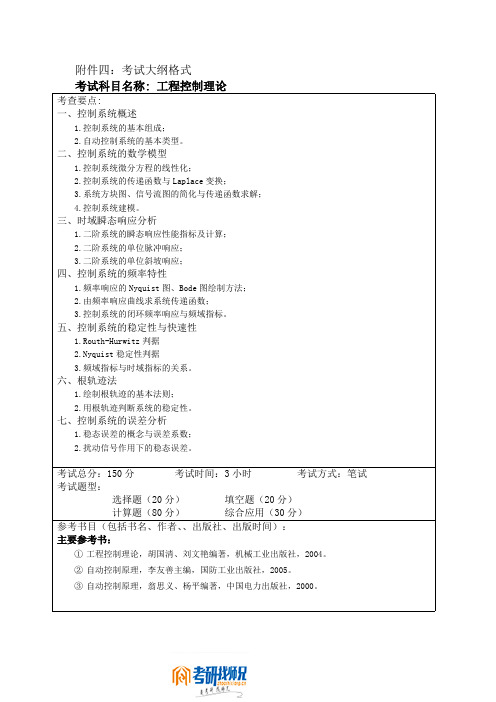
考试科目名称: 工程控制理论
考查要点:
一、控制系统概述
1.控制系统的基本组成;
2.自动控制系统的基本类型。
二、控制系统的数学模型
1.控制系统微分方程的线性化;
2.控制系统的传递函数与Laplace变换;
3.系统方块图、信号流图的简化与传递函数求解;
4.控制系统建模。
三、时域瞬态响应分析
1.二阶系统的瞬态响应性能指标及计算;
2.二阶系统的单位脉冲响应;
3.二阶系统的单位斜坡响应;
四、控制系统的频率特性
1.频率响应的Nyquist图、Bode图绘制方法;
2.由频率响应曲线求系统传递函数;
3.控制系统的闭环频率响应与频域指标。
五、控制系统的稳定性与快速性
1.Routh-Hurwitz判据
2.Nyquist稳定性判据
3.频域指标与时域指标的关系。
六、根轨迹法
1.绘制根轨迹的基本法则;
2.用根轨迹判断系统的稳定性。
七、控制系统的误差分析
1.稳态误差的概念与误差系数;
2.扰动信号作用下的稳态误差。
考试总分:150分考试时间:3小时考试方式:笔试考试题型:
选择题(20分)填空题(20分)
计算题(80分)综合应用(30分)
参考书目(包括书名、作者、、出版社、出版时间):
主要参考书:
①工程控制理论,胡国清、刘文艳编著,机械工业出版社,2004。
②自动控制原理,李友善主编,国防工业出版社,2005。
③自动控制原理,翁思义、杨平编著,中国电力出版社,2000。
哈工程-自动化-考研-必修
四、汇编语言程序设计基础
1.要求考生掌握汇编语言语句种类、格式,表达式及运算符
2.要求考生熟练掌握主要伪指令的使用,能够正确分析汇编语言源程序
3.要求考生能熟练进行顺序程序、分支程序、循环程序、子程序设计
五、输入/输出及中断系统
1.要求考生掌握中断的基本概念、处理过程,熟练掌握8086/8088中断系统及中断种类
3.正定性问题的证明
六、线性空间
1.线性空间与子空间的概念
2.基、维数坐标
3.线性变换
复变函数部分
一、复数与复变函数
1.复数的代数运算
2.复数的乘幂和方根
3.复变函数及其极限和连续性
二、解析函数
1.解析函数定义,复变函数的导数,柯西—黎曼条件
2.2.初等函数
三、复变函数的积分
1.积分的定义、存在条件、计算方法
考查要点:
一、线性网络分析的一般方法
1.要求考生掌握网孔分析法.
2.要求考生掌握节点分析法.
3.要求考生掌握回路分析法..
3.要求考生熟练掌握8086/8088存储器管理。对物理地址、段地址、偏移地址有明确的认识
4.要求考生掌握总线周期及时序,了解8086/8088读写操作时序
三、指令系统
1.要求考生熟练掌握8086/8088寻址方式,堆栈概念
2.要求考生掌握数据传送指令,算术运算指令,逻辑运算指令及移位指令,控制转移指令
5、频域指标与时域指标的关系。
五、控制系统的校正与综合
1、频率响应法串联校正分析法设计;
2、基于频率响应法的串联、反馈校正的综合法设计。
六、非线性控制系统的分析
1、了解典型非线性特性的输入输出关系(数学表达及关系曲线);
最新哈尔滨工程大学自动控制原理考研大纲
1、采样过程、采样定理、零阶保持器的基本概念。
八、数字控制系统的数学基础
1、Z变换的基本概念及计算方法;
2、Z变换基本定理及Z反变换;
九、数字控制系统的数学描述
1、脉冲传递函数的概念及闭环脉冲传递函数的求取;
2、(纯)离散系统方框图及其简化的方法。
一十、数字控制系统分析
1、Z平面的稳定性分析;
5、频域指标与时域指标的关系。
五、控制系统的校正与综合
1、频率响应法串联校正分析法设计;
2、基于频率响应法的串联、反馈校正的综合法设计。
六、非线性控制系统的分析
1、了解典型非线性特性的输入输出关系(数学表达及关系曲线);
2、理解非线性环节对线性系统的影响;
3、相平面法、描述函数法分析非线性控制系统。
考试题型:分析计算题(150分)
参考书目(包括书名、作者、出版社、出版时间)
主要参考书:
1、《自动控制原理》胡寿松科学出版社(第四版)2001
3、控制系统稳态误差分析及其计算方法;
4、复合控制。
三、根轨迹法
1、根轨迹、根轨迹方程及其绘制根轨迹的基本规则;
2、理解控制系统根轨迹分析方法。
四、频率响应法
1、线性系统频率响应物理意义及其描述方法;
2、典型环节的频率响应(幅相曲线与对数频率特性曲线);
3、开环系统及闭环系统的频率响应的绘制;
4、奈奎斯特(Nyquist)稳定判据和控制系统相对稳定性;
5、特征多项式和特征值;
6、线性定常系统的运动分析、状态转移阵、脉冲响应阵;
7、线性离散系统的状态空间描述。
一十三、线性系统的能控性和能观性
1、能控性和能观性的基本ቤተ መጻሕፍቲ ባይዱ念;
哈工哈尔滨工程大学自动化学院控制科学与工程考研资料汇总

第
七.某控制系统的结构如图,其中 G ( s)
7
页
K s (0.1s 1)(0.001s 1)
。
要求设计串联校正装置,使系统具有 K≥1000 及υ≥45 的性能指标。 (13 分) Xis - X0(s)
Gc′(s)
G(s)
. 八.设采样控制系统饿结构如图所示,其中 G ( s) xI(t) XI(s) T G(s)
1 , T 0.25 s 试判断系统的稳定性。 s( s 4)
x0(t) X0(s)
(10 分)
九. 已知单位负反馈系统的开环传递函数为: G( s)
K , 试绘制 K ( s 1) ( s 4) 2
2
由 0 ->+∞变化的闭环根轨迹图,系统稳定的 K 值范围。(15 分)
第
8
m
f
y (t)
四.系统结构如图所示,其中 K=8,T=0.25。 (15 分) (1) (2) (3) Xi(s) 输入信号 xi(t)=1(t) ,求系统的响应; 计算系统的性能指标 tr、tp、ts(5%) 、бp; 若要求将系统设计成二阶最佳ξ=0.707,应如何改变 K 值
K s(Ts 1)
第
11
页
(3) 频率特性是指_____________________________________________________ ________________________________________________________________。 (4) 系统校正是指_____________________________________________________ ________________________________________________________________。 (5) 幅值裕量是指_____________________________________________________ ________________________________________________________________。 (6) 稳态误差是指_____________________________________________________ ________________________________________________________________。 (7) 图 a 的传递函数为 G(s)=________________ 。 (8) 图 b 中的 t=______。 (9) 图 c 的传递函数为 G(s)=________________ 。 (10) s3+5s2+8s+6=0 此特征方程的根的实部小于-1 时系统稳定的 k 值范围______。 (11) 图 d 的传递函数为 K=__________________。 (12) 图 e 的ωc=________________ 。 (13) 图 f 为相位__________校正。 (14) 图 g 中的γ=________Kg=______________。 (15) 图 h、i、j 的稳定性一次为______、______、______。 (16) A(s)=s6=2s5+8s4+12s3+20s2+16s+16=0 则次系统是否稳定________。 (17) 开环传递 G(s)=k(T1s+1)/s2(T2s+1),(T1>T2,k、T1、T2)为常数)则γmax=______。
哈工程考研总复习提纲解读

第一章平面机构的结构分析一、机构的组成要素1.运动副机构是由许多构件组合而成的。
在机构中,每个构件都以一定的方式与其他构件相互连接。
相互连接的两构件既保持直接接触,又能产生一定的相对运动。
我们把两构件直接接触形成的可动联接称为运动副。
参与接触而构成运动副的点、线、面称为运动副元素。
按组成运动副两构件间的相对运动是平面运动还是空间运动,运动副分为平面运动副和空间运动副。
在此,仅讨论平面运动副。
1)按接触性质分,运动副分为低副和高副①面接触的运动副成为低副,例如滑块与导槽之间则为面接触②点接触或线接触的运动副成为高副,互相啮合的轮齿之间为点或线接触2)按所能产生相对运动的形式分为转动副、移动副、平面滑动副(高副)等①具有一个独立相对转动的运动副成为转动副②具有沿一个方向独立相对移动的运动副成为移动副我们把构件所具有的独立运动的数目成为自由度。
把对独立运动所加的限制成为约束。
每加上一个约束,构件便失去一个自由度。
低副(转动副和移动副)具有两个约束;高副具有一个约束。
2.运动链1)概念两个以上构件以运动副联接而成的系统成为运动链2)分类①闭链和开链如果组成运动链的每个构件至少包含两个运动副元素,则构件形成封闭系统,这种运动链成为闭链。
如果这种链中有的构件只包含一个运动元素,便成为开链如果构件通过运动副联接构成的是相对不可动系统,称为桥架或结构体,即成为一个构件②平面运动链和空间运动链根据运动链中各构件间的相对运动为平面运动还是空间运动,可将运动链分为平面运动链和空间运动链两类3.机构如果将运动链中某一构件固定而成为机架,并有一个或几个构件给定运动规律(原动件),使其余各构件(从动件)具有确定的相对运动,则该运动链便成了机构。
任何机构都包括机架、原动件和从动件三个部分二、平面机构运动简图机构运动简图是用规定的简单线条和符号代表构件和运动副,按比例尺定出各运动副的位置,准确表达机构运动特征的简单图形。
机构运动简图一定要严格按比例尺绘制,否则只能称为机构示意图。
上海工程技术大学808自动控制原理(9.23)2021年考研专业课初试大纲
上海工程技术大学硕士研究生入学考试《自动控制原理》考试大纲考试科目:自动控制原理考试科目代码:808考试参考书目:1、王建辉,顾树生.自动控制原理(第2版).清华大学出版社.2、刘豹,唐万生.现代控制理论(第3版).机械工业出版社.考试总分:150分考试时间:3小时一、考试目的和要求控制理论基础是一门主要的专业基础课,其主要目的是使学生掌握线性控制系统的基本概念、基本原理以及分析方法,为后继专业课程打下基础。
要求学生对经典控制理论及现代控制理论有全面的了解,掌握传递函数的概念及其求取方法,了解典型环节及其运动规律;能绘制一般系统的结构框图并进行简化,掌握信号流图绘制方法及梅逊公式;掌握一阶系统、二阶系统的时域响应;理解系统稳定性的概念和条件,掌握稳定性的判定方法;掌握稳态误差的求取以及降低稳态误差的方法;掌握根轨迹的绘制方法,能够根据根轨迹分析系统的性能;理解频率响应的概念,能绘制系统的奈奎斯特图和波德图;掌握控制系统的校正方法。
掌握线性定常时不变系统状态空间表达式的建立及求解、系统的能控能观性分析、状态反馈控制器及全维观测器的设计。
二、考试内容1. 自动控制系统的基本概念自动控制的基本概念;开环控制和闭环控制的特点;控制系统的基本组成、控制方式、分类和常用测试信号;控制系统的性能指标。
2. 自动控制系统的数学模型控制系统数学模型的定义;简单电路、机电系统微分方程、传递函数模型的建立;结构框图的绘制及等效变换;信号流图的绘制及梅逊增益公式的应用。
3. 自动控制系统的时域分析时域性能指标和系统稳定性条件;一阶、二阶系统的时域分析;主导极点、高阶系统时域分析;Routh稳定判据;稳态误差和稳态误差系数的计算。
4. 根轨迹法根轨迹的定义及根轨迹方程;根轨迹的绘制方法;根轨迹法在系统分析及计算中的应用。
5. 频率法系统频率特性的定义和表示法,典型环节的频率特性;系统奈奎斯特及伯德图的绘制方法;Nyquist稳定判据及应用;稳定裕度的含义及计算方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考试科目名称:自动控制事理
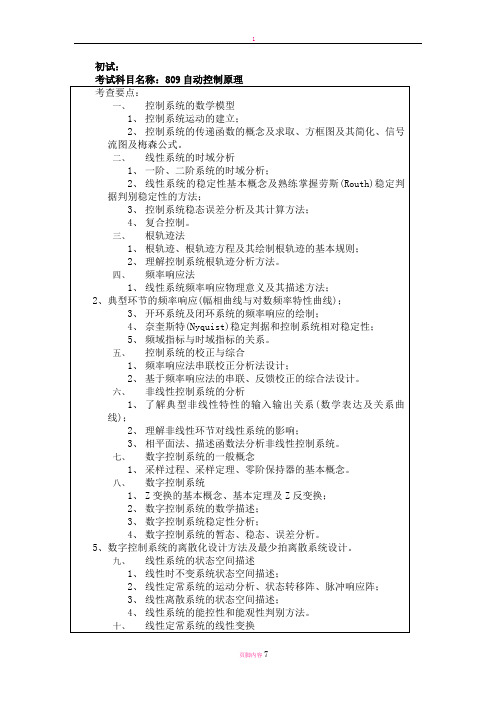
考查要点:
一、控制系统的数学模型
1、控制系统运动的建立;
2、控制系统的传递函数的概念及求取、方框图及其简化、信号流图及梅森公式。
二、线性系统的时域剖析
1、一阶、二阶系统的时域分析;
2、线性系统的稳定性基本概念及熟练掌握劳斯()稳定判据判别性的方法例
3、控制系统稳态误差分析及其计算成本;
4、复合控制。
三、根轨迹法
1、根轨迹、根轨迹方程及其绘制根轨迹的根基轨则;
2、理解控制系统根轨迹分析方法。
四、频率响应法
1、线性系统频率响应物理意义及其描述方法;
2、典型环节的频率响应(幅相曲线与对数频率特性曲线);
3、开环系统及闭环系统的频率响应的绘制;
4、奈奎斯特稳定判据和控制系统相对稳定性;
5、频域指标与时域指标的关系。
五、控制系统的校正与综合
1、频率响应法串联校正分析法;
2、基于频率响应法的串联、反馈校正的综合法设计。
六、非线性控制系统的剖析
1、了解典型非线性特征的输入输出关系(数学表达及关系曲线);
2、理解非线性环节对线性系统的影响;
3、相平面法、描述函数法剖析非线性节制系统。
七、数字控制系统的一般概念
1、采样过程、采样定理、零阶连结器的根基概念。
八、数字控制系统的数学基本
1、 Z变换的根基概念及计算方法;
2、 Z变换根基定理及Z反变换;
九、数字控制系统的数学描述
1、脉冲传递函数的概念及闭环脉冲传递函数的求取;
2、 (纯)离散系统方框图及其简化的方法。
十、数字控制系统分析
1、 Z平面的稳定性分析;
2、朱利稳定判据;
3、数字控制系统的暂态、稳态、误差分析。
十一、数字控制系统的设计
1、控制系统模拟化设计方法;
2、数字控制系统的离散化设计体例及起码拍离散系统设计;
十二、线性系统的状况空间描述
1、状况空间描述的基本概念;
2、线性时不变系统状况空间描述;
3、状况方程和输出方程的求取及其标准形;
4、传递函数阵;
5、特征多项式和特征值;
6、线性定常系统的行为剖析、状况转移阵、脉冲响应阵;
7、线性离散系统的状况空间描述。
十三、线性系统的能控性和能观性
1、能控性和能观性的根基概念;
2、能控标准和能观标准形;
3、能控性和能观性的判据。
十四、线性定常系统的线性变换
1、状况空间表达式的线性变换;
2、对偶性事理;
3、线性系统的结构分解。
十五、李雅普诺夫稳定性分析
1、李亚普诺夫意义下的运动稳定根基概念;
2、李亚普诺夫第二法主要定理;
3、系统行为稳定性判据。
十六、线性反馈系统的时刻域综合
1、状况反馈和输出反馈;
2、极点配置的设计方法;
3、状态观测器的设计;
4、状态观测器和状况反馈组合系统。
注:非线性控制系统部门(六)与数字控制系统(七~十一)部门任选其一。