微机原理与接口技术——第三章
微机原理与接口技术第3章
直接寻址
例【3-4】 MOV AL,DS:[2345H]是偏移地址为16位 的直接寻址的指令,指令中直接给出了偏移地址, EA=2345H,机器码是:A04523H,其中,操作码是 A0H,紧接着的是偏移地址。 例【3-5】 假定在数据段DS有双字变量定义为: VAR DD 12345678H 其中VAR是变量名,在经过汇编与连接生成可执行 的程序在执行时,它有实际的物理地址,由段寄存 器DS与偏移地址EA组成。在执行指令MOV EAX,VAR 时,其功能是根据变量名VAR的DS和EA,从数据段 内偏移地址为EA的内存单元,连续读取4个字节数 送给EAX,即(EAX)=12345678H。
(5)相对基址(加)变址寻址 相对基址(加)变址寻址是在基址(加)变 址寻址的基础之上,加上一个带符号的8位或16 位的位移量,最后形成一个16位的偏移地址,所 访问的段、基址寄存器与变址寄存器的组合与上 述的相同。 例【3-21】 MOV AL,[BX+SI+10H] ;访问DS段,可以写成 MOV AL,[BX][SI+10H]形式 MOV DX,[BP+DI-29H] ;访问SS段,可以写成 MOV DX,[BP][DI-29H]形式
8.16位的存储器寻址方式
32位CPU兼容16位CPU的寻址方式,也兼容16 位的指令系统,在编写32位程序时,不可避免地 要使用16位的指令系统编程,在16位CPU的寻址 方式中,存储器寻址仍然是主要的,这是因为16 位的立即寻址、寄存器寻址与32位的相同,容易 理解,下面简单介绍16位的存储器寻址方式。 (1)直接寻址 指令中直接给出了16位的偏移地址,物理地 址=段寄存器值*16+偏移地址。 例【3-15】 MOV BL,[2060H] ;访问DS段 MOV AX,[3344H] ;访问DS段
微机原理与接口技术第三章

(一)概述 3. 汇编语言源程序的结构 2)简化段定义的程序结构
.MODEL SMALL .STACK 100H .DATA ………… .CODE START: MOV AX,@DATA MOV DS,AX ………… MOV AH,4CH INT 21H END START ;存储模型:小型 ;定义堆栈段及其大小 ;定义数据段 ;数据声明 ;定义代码段 ;起始执行地址标号 ;数据段地址 ;存入数据段寄存器 ;具体程序代码
22
(一)概述
5. 编译、链接和运行程序
Link library Source file Step2: Assembler Object file Listing file Step1: Text editor Step3: Linker Step4: Executable OS loader Output file Map file
(一)概述 3. 汇编语言源程序的结构 1)完整段定义的程序结构 ASSUME伪指令:告诉汇编程序,哪一个段和哪一 个段寄存器相对应,即某一段地址应放入哪一个段寄 存器。 操作系统的装入程序在装入执行时,把CS初始化成 正确的代码段地址,把SS初始化为正确的堆栈段地址, 因此源程序中无再需初始化CS、SS。 装入程序已将DS寄存器留作它用,故在源程序中应 有以下两条指令: MOV AX,DATA MOV DS,AX DOS环境下,汇编语言返回DOS: MOV AH,4CH INT 21H
每个寄存器可作32位或16位使用。 一些16位的寄存器也可以作为两个单独的8位使用。
3
一、Intel x86 微处理器的组成结构 1. 内部寄存器 通用寄存器:主要用于算数运算和数据传送。
每个寄存器可作32位或16位使用。 一些16位的寄存器也可以作为两个单独的8位使用。
微机原理与接口技术课件微机第三章

常见的高级语言包括C、C、Java、 Python等,可用于开发各种应用程序 和软件。
高级语言具有易学易用、可移植性好 的特点,但执行速度较慢,占用内存 较多。
05
微机操作系统
操作系统定义与功能
操作系统定义
操作系统是计算机系统中用于管 理和控制计算机硬件与软件资源 的系统软件,是计算机系统的核 心组成部分。
微机发展历程
总结词
微机的发展经历了从早期的大型机、小型机到现在的个人计算机和移动设备的演变。
详细描述
微机的发展始于20世纪70年代,最早的微机是苹果电脑和IBM PC。随着技术的不断发展,微机的性能不断提高, 体积不断减小,价格也逐渐降低。同时,随着互联网的普及,微机已经成为人们获取信息、交流沟通、娱乐休闲 的重要工具。
。
执行指令
执行指令是指根据指令的操作 码执行相应的操作,完成指令
的功能。
访存取数
访存取数是指根据指令中的地 址码从内存中读取或写入数据
。
04
微机编程语言
机器语言
机器语言是计算机能够直接执 行的指令集合,由二进制数0和 1组成。
机器语言具有执行速度快、占 用内存少的特点,但编写复杂, 易出错,可移植性差。
实时操作系统
实时操作系统主要用于实时控制系统,要求系统能够快速、准确地响 应外部事件,具有实时性和高可靠性。
网络操作系统
网络操作系统是用于管理网络资源的操作系统,支持网络中计算机之 间的通信和资源共享。
常见微机操作系统介绍
Windows
微软公司开发的桌面操作 系统,广泛应用于个人计 算机领域。
Linux
02
微机硬件组成
中央处理器
中央处理器(CPU)是微机的核心部 件,负责执行指令和处理数据。
微机原理与接口技术第三章
演示
2. 寄存器寻址方式
特点
执行速度快:因操作数就在CPU内部 源操作数和目的操作数都可使用寄存器寻址 注意:源操作数的长度必须与目的操作数一致,否 则会出错。
例如:MOV CX,AH
×
尽管CX寄存器放得下AH的内容,但汇编程序不知 道将它放到CH还是CL。
3. I/O端口寻址
操作数存放在I/O端口中 直接端口寻址 IN AL,50H ;将50H端口的字节数输入到AL IN AX,60H ;将60H和61H两个相邻端口的16位数 据输入到AX DX寄存器间接端口寻址 MOV DX,383H OUT DX,AL MOV DX,380H IN AX,DX
于位移量
MOV AX, [DI+WVAR] ;= MOV AX,WVAR[DI] ;等同于 MOV AX,[DI+0010H]
第3章:相对寻址方式中的位移量
在寄存器相对和相对基址变址寻址方式中,其位
移量不仅可用常量表示,也可用符号表示 这个符号可以是变量名,例如WVAR变量,而且 支持多种表达形式
演示
MOV AX, 6[BX+DI]
MOV AX, 6[BX][DI]
第3章:存储器寻址方式中的变量
变量指示内存中的数据,变量名具有地址属性。
存储器寻找方式中经常采用变量形式 变量的定义
WVAR DW 1234H ;定义16位变量WVAR,具有初值1234H ;假设其偏移地址为10H
单独引用变量名是直接寻址方式 MOV AX,WVAR ;指令功能:AX=1234H ;等同于 MOV AX,[0010H] 相对寻址方式中,变量名表示其偏移地址,相当
1. 通用数据传送指令
提供方便灵活的通用传送操作 有4条指令 MOV XCHG PUSH POP
微机原理与接口技术第3章(指令部分)
例:编程计算 0+1+2+3+4+ -----10 编程计算
MOV AL,0 , MOV BL,1 , MOV CL,10 NEXT:ADD AL,BL , INC BL DEC CL JNZ NEXT ;CL≠0 转 ≠ HLT
1
3.1 概述 一、指令包含的基本内容
12
(3)相对寻址
例: MOV AX, [SI+100H]
;结果 : 结果 AX (DS×16+SI+100H) ×
例:MOV AL,[BP+DATA] MOV AL, DATA[BP] ; DATA是符号表示的位移量。 表示的位移量 是符号表示的位移量。
结果 : AL (SS×16+BP+DATA) ×
11
(2)间接寻址 例:MOV AX,[BX] , •结果 : AX 结果 (DS×16+BX) ×
...
3000H:0000H : • EA= BX /SI /DI , 物理地址=DS*16+EA 物理地址 • EA= BP 物理地址=SS*16+EA 物理地址 :1234H :50H :1235H :30H
1. 做什么操作? 做什么操作? MOV ,ADD, OR,CMP等助记符 等助记符
2. 操作的数据是什么? ①CPU内的寄存器; 操作的数据是什么? 内的寄存器 内的寄存器; 内存的某一个或几个单元 单元; ②内存的某一个或几个单元; 结果放在那里? 3. 结果放在那里? 立即数。 ③立即数。 端口; 端口 ④I/O端口; 下一条指令在哪里? 4. 下一条指令在哪里? IP←IP+1
微机原理与接口技术课件微机第三章

MOV AX , ES:[3E4CH] MOV AX , RESULT
如何区分RESULT是立即数还是符号地址?
如果 RESULT DW 3E4CH; 符号地址 MOV AX,RESULT
如果 RESULT EQU 3E4CH; 立即数 MOV AX,RESULT
(2)PUSH 进栈指令 指令格式为:PUSH 源(不能是立即数) 其操作过程是: a、SP-2,指示堆栈中可以存放数据的位置 b、存源操作数,完成进栈操作。
(3)POP 出栈指令 指令格式为:POP 目的(不能是CS) 其操作过程是: a、将SS:SP所指示的栈顶处的两个字节的数据,弹到目的操作数中; b、SP+2,指示当前栈顶位置,完成出栈操作。
操作码
0:数据从寄存器传出 1:数据传至寄存器
2.立即数寻址指令的编码
包含段寄存器的指令的编码
段超越前缀指令的编码
3-3 8086的指令集
01
添加标题
02
添加标题
03
添加标题
04
添加标题
05
添加标题
06
添加标题
8086指令系统按功能可分为6大类型:
一、数据传送指令
l 通用数据传送
添加标题
l累加器专用传送指令
目标地址传送指令 这类指令有: LEA 有效地址传送到寄存器 LDS 将双字指针送到寄存器和DS LES 将双字指针送到寄存器和ES Eg:LEA BX,[1000H] LDS SI,[1000H] LES DI,[1000H]
标志寄存器传送指令 LAHF FR寄存器的低8位送AH SAHF AH 送 FR寄存器的低8位 PUSHF FR寄存器推入堆栈 POPF 从栈顶中弹出存入FR寄存器
《微机原理及接口技术》第三章

输入输出接口的种类繁多, 常见的有串行接口、并行 接口、USB接口等。
ABCD
常见的输入设备包括键盘、 鼠标、扫描仪等,输出设备 包括显示器、打印机等。
输入输出接口的性能指标 包括传输速度、数据格式 和兼容性等。
总线
01
总线是微机中各部件之间传输信 息的公共通道。
02
总线分为数据总线、地址总线和 控制总线,分别传输数据、地址
汇编语言程序设计的风格
良好的编程风格可以提高代码的可读性和可维护性,包括变量命名 规则、注释规则、代码布局等。
05
微机的应用与发展
微机在工业控制中的应用
实时控制
微机用于实时控制工业生产过程 中的各种参数,如温度、压力、 流量等,确保生产过程的稳定性
和安全性。
自动化生产线
微机集成于自动化生产线中,负责 监控生产设备的运行状态,实现生 产线的自动化和智能化。
故障诊断与预防
微机通过对工业设备的监测和分析, 能够及时发现潜在的故障并进行预 警,提高设备运行的可靠性。
微机在数据处理中的应用
数据采集与处理
01
微机用于采集、处理和分析大量数据,支持企业决策和业务运
营。
数据库管理
02
微机作为数据库服务器,提供数据存储、查询和管理功能,支
持企业信息系统的运行。
云计算与大数据
微机将朝着更小巧、轻便和集成化的方向发展,便于携带和使 用。
随着网络安全问题的日益突出,微机的安全性和可靠性将受到 更多关注,以确保数据和系统的安全。
THANKS
感谢观看
微机原理及接口技术第三章
• 微机原理概述 • 微机的硬件结构 • 微机的指令系统 • 微机的编程技术 • 微机的应用与发展
微机原理与接口技术 第三章 课后答案
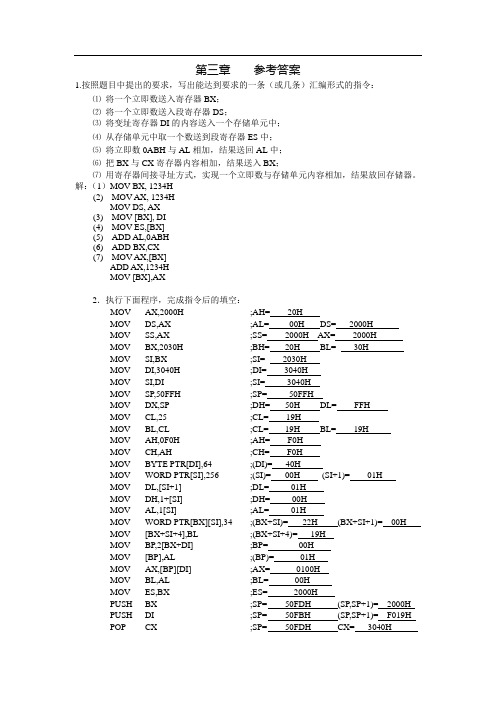
第三章参考答案1.按照题目中提出的要求,写出能达到要求的一条(或几条)汇编形式的指令:⑴将一个立即数送入寄存器BX;⑵将一个立即数送入段寄存器DS;⑶将变址寄存器DI的内容送入一个存储单元中;⑷从存储单元中取一个数送到段寄存器ES中;⑸将立即数0ABH与AL相加,结果送回AL中;⑹把BX与CX寄存器内容相加,结果送入BX;⑺用寄存器间接寻址方式,实现一个立即数与存储单元内容相加,结果放回存储器。
解:(1)MOV BX, 1234H(2)MOV AX, 1234HMOV DS, AX(3)MOV [BX], DI(4)MOV ES,[BX](5)ADD AL,0ABH(6)ADD BX,CX(7)MOV AX,[BX]ADD AX,1234HMOV [BX],AX2.执行下面程序,完成指令后的填空:MOV AX,2000H ;AH= 20HMOV DS,AX ;AL= 00H DS= 2000HMOV SS,AX ;SS= 2000H AX= 2000HMOV BX,2030H ;BH= 20H BL= 30HMOV SI,BX ;SI= 2030HMOV DI,3040H ;DI= 3040HMOV SI,DI ;SI= 3040HMOV SP,50FFH ;SP= 50FFHMOV DX,SP ;DH= 50H DL= FFHMOV CL,25 ;CL= 19HMOV BL,CL ;CL= 19H BL= 19HMOV AH,0F0H ;AH= F0HMOV CH,AH ;CH= F0HMOV BYTE PTR[DI],64 ;(DI)= 40HMOV WORD PTR[SI],256 ;(SI)= 00H (SI+1)= 01HMOV DL,[SI+1] ;DL= 01HMOV DH,1+[SI] ;DH= 00HMOV AL,1[SI] ;AL= 01HMOV WORD PTR[BX][SI],34 ;(BX+SI)= 22H (BX+SI+1)= 00HMOV [BX+SI+4],BL ;(BX+SI+4)= 19HMOV BP,2[BX+DI] ;BP= 00HMOV [BP],AL ;(BP)= 01HMOV AX,[BP][DI] ;AX= 0100HMOV BL,AL ;BL= 00HMOV ES,BX ;ES= 2000HPUSH BX ;SP= 50FDH (SP,SP+1)= 2000HPUSH DI ;SP= 50FBH (SP,SP+1)= F019HPOP CX ;SP= 50FDH CX= 3040HPOP DX ;SP= 50FFH DX= 2000HXCHG AX,BP ;AX= 0000H BP= 0100HXCHG DH,BL ;DH= 00H BL= 20HLAHF ;FLAG= 0002H AH= 02HSAHF ;FLAG= 0002H AH= 02HPUSHF ;SP= 50FDH (SP,SP+1)= 0002HPOPF ;SP= 50FFH FLAG= 0002H3.设DS=2000H,ES=2100H,SS=1500H,SI=00A0H。