数字式电子罗盘毕业设计
基于51单片机的电子罗盘系统的设计与实现综述

目前电子罗盘按照有无倾角补偿可以分为平面电子罗盘和三维电子罗盘,也可以按照传感器的不同分为磁阻效应传感器、霍尔效应传感器和磁通门传感器。
利用磁性材料的磁阻效应制成磁性效应传感器。磁性材料的易磁化轴、形状和磁化磁场的方向影响着其磁化方向。图 1.1显示出,当电流流通磁性材料时,其电阻阻值大小由材料流通电流的方向与磁化方向的夹角θ决定。把磁场 M加在磁性材料上,之前磁化方向开始转动。如果磁化方向转向与电流的方向垂直,θ角增大,电阻阻值将减小;如果平行,即θ角减小,电阻阻值将增大,电流方向与电阻值的关系为 ,这就是磁阻效应[2]。
图1.1磁阻效应原理
磁阻式传感器具有低功耗,抗干扰,温度稳定性好,而且电路很容易搭建。灵敏度和线性度比较好。其性能及稳定性容易被迟滞误差和零点温度漂移所影响,地磁场强度比较小,外界非磁场容易对磁阻式电子罗盘产生干扰。电子罗盘发展相当迅速,在需要导航的系统的各行各业。并且有着非常大的应用前景[3]。
由于GPS导航在高山、树林时信号传输不能很好的回馈到卫星中。同时GPS容易受到其他信号、波形干扰,导致其稳定在某些地区较差。所以需要一个稳定的导航系统在任何场地都能测出行驶方向,所以这个导航系统有很大的发展前景。有地磁大小和方向随地点不同而不同, 无论在地球的每一个地方,磁场的水平分量永远指向磁北,电子罗盘根据这一个原理制作的,所以电子罗盘可以用于稳定的精确的汽车导航定向[3],电子罗盘系统的市场需求也在我国日趋明显,而且也初具规模。未来电子罗盘的发展的方向有以下几点:
对研制的数字电子罗盘系统样机,进行测试。其结果显示,该数字电子罗盘能对行驶方向进行的动态测量,在 0°到360°范围行驶方向测量精度可达±2.0°。研制的数字电子罗盘,具有体积小、性能稳定、反应快、低功耗等优点,在车辆导航设备领域有非常广阔的应用前景。
基于HMC5883的电子罗盘设计
支。 正常工作模式 中的串 口接 收 GP S数据放在 串口中断中处
定 。 芯 片 功耗 低 , 作 电流仅 5 0 A。 x x .5 该 工 0 6 6 1 mm 的 QF 4 N
封 装 ,适 用 于 电池 供 电 的 手持 设备 。图 中芯 片 S E P引 脚 为 LE
休 眠 控 制 端 ,低 电平 休 眠 , 此 时 消耗 电流 仅 为 3_ 。GS 、 p a 1 GS 2为灵 敏 度 选 择 ,共 有 4个 量 程 可 选 择(.g2/g6 ) 1 /g4 /g。输 5
3 o 【r ( 6 - ac 劬 )× 8 H ] 0 1
x > O, r > 0
( )控 制 器 模 块 2
控 制 器 采 用 MS 4 0 1 9 P 3F 4 ,它 是 一 款 1 6位 高 性 能 、超 低 功 耗 MC U, 工 作 电压 1 ~ . . 36 在 1 z 时钟 下 ,工 作 8 V, MH 电流 为 01' 0 A。大 多数 指 令 可 以单 时 钟 周 期 执 行 ,具 有 .- 0 “ " 4
区磁 偏 角 已知 时 ,真 北 方 位 角 为 :
A= + () 4
三 、 电子 罗盘 系 统 设 计 1 、硬 件 设 计 电子 罗 盘 硬 件 系 统 设 计 如 图 2所 示 ,该 电子 罗 盘 主要 由
传感器 、 控制器 、电源 、G S模块及显 示输 出 5个部分组成 。 P () 1 传感器模块 传感器模块 由磁 阻传感器和加速度传感器组成 。 磁阻传感器 电路 如图 3所示 ,图中 H 5 8 MC 8 3为数字接 口三轴磁阻传 感器 ,内置 ASC放大器 ,1 A D转换器, I 2位 /
范例三 电子罗盘
范例三 电子罗盘一.系统概述本系统的目标是设计一个两轴数字罗盘系统。
对其所指的方向进行测量。
当系统工作时,系统中的磁阻传感器(HMC022)对所在地的地磁进行A/D 采集,然后对采集量进行处理,将所在的方向相对正北的角度通过串口发送给高端。
本系统可工作在正常状态和标定状态。
正常状态在该状态下,系统对地磁进行正常采集后进行校准,然后通过串口将计算的方向角发送出来。
2 标定状态在该状态下,系统对周围的磁场进行采集,以此为参考,推导出校准参数。
退出该状态时,将校准参数保存起来,以便用于对正常状态下采集的数据进行偏置校准。
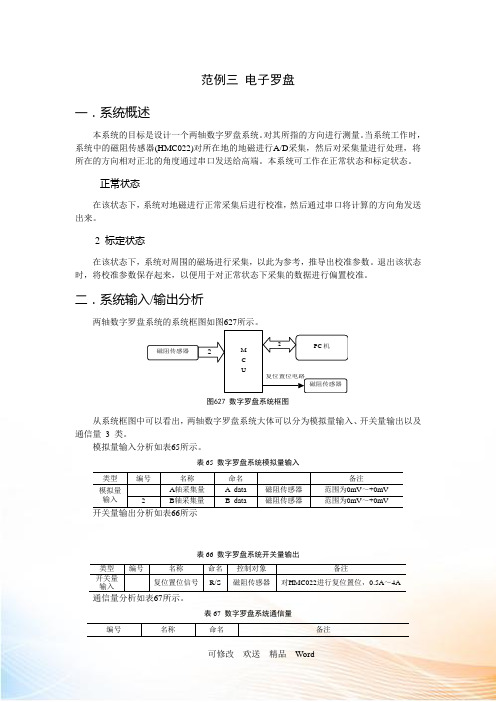
二.系统输入/输出分析两轴数字罗盘系统的系统框图如图627所示。
M C U2磁阻传感器2PC 机磁阻传感器复位置位电路图627 数字罗盘系统框图从系统框图中可以看出,两轴数字罗盘系统大体可以分为模拟量输入、开关量输出以及通信量 3 类。
模拟量输入分析如表65所示。
表65 数字罗盘系统模拟量输入类型 编号 名称 命名 备注模拟量输入A 轴采集量 A_data 磁阻传感器 范围为0mV ~+0mV 2B 轴采集量B_data磁阻传感器范围为0mV ~+0mV开关量输出分析如表66所示表66 数字罗盘系统开关量输出类型 编号 名称 命名 控制对象 备注开关量 输入复位置位信号R/S磁阻传感器对HMC022进行复位置位,0.5A ~4A表67 数字罗盘系统通信量编号名称命名备注串口发送数据 TxD 向PC 端发送数据 2串口接受数据RxD接收PC 端发来的数据三.硬件设计芯片选型选取芯片时应该注意:不要将所有的I/O 口用满,应当预留一定的输入输出端口,以便扩展需要。
通过分析数字罗盘系统的输入量和输出量,发现所需的I/O 口较少,为5个。
但考虑到该系统对A/D 采集精度要求较高并且要求有SCI 模块以便于通信,故考虑该系统采用具有0BitA/D 采集和SCI 模块的MR8。
2 设计框图数字罗盘系统的硬件框图如图628所示,下面将分析A/D 采集中的电压放大模块、HMC022(磁阻传感器)的置位/复位电路和SCI(RS232)通信模块。
一种电子罗盘的电路设计

一种电子罗盘的电路设计姚丽青;杨文杰【摘要】Using the magnetic resistance sensor and accelerationsensor,based on the idea of attitude an-gles and geomagnetic filed,an electronic compass used for measuring attitude angles is designed.The hard-ware design and software flow of the electronic compass is presented.And the presentation is accurate and detailed.According to main parts of the circuit,the error sources of measurement accuracy are analyzed.U-sing the position error correction method based on the least squares, the accuracy is also corrected.%利用磁阻传感器和加速度传感器设计了测定姿态角的电子罗盘,给出了电子罗盘的硬件设计和软件流程,电路具体准确。
根据其构成的主要器件,分析了影响电子罗盘测量精度的误差来源,并采用基于最小二乘法位置罗差补偿法做了校正。
【期刊名称】《湖北民族学院学报(自然科学版)》【年(卷),期】2014(000)004【总页数】4页(P463-466)【关键词】姿态角;电子罗盘;磁阻传感器;加速度传感器;误差校正【作者】姚丽青;杨文杰【作者单位】山西大学物理电子工程学院,山西太原030013;山西大学物理电子工程学院,山西太原030013【正文语种】中文【中图分类】TP212.13基于磁阻传感器和加速度传感器的电子罗盘具有体积小、重量轻、精度高、可靠性强、响应速度快等优点[1],被广泛应用于航空、航海、交通、电子通讯等领域,也应用于智能手机等生活类电子产品中.具体可以配合车载GPS 导航(GPS 进入隧道或速度低于20km/h 就会失效)、电信基站天线角度的测量、大型机械平台的水平测量、手机、游戏杆等产品中.本设计中的电子罗盘采用Honeywell 公司的两轴磁阻传感器HMC1052L(x,y),单轴磁阻传感器HMC1021Z 以及MEMS 重力加速度传感器MXD2020E,采用MSP430F247 单片机采集处理传感器信号,经过数据预处理和算法补偿后,罗盘系统精度基本上可以达到± 1°.该罗盘结构简单、体积小、重量轻,已经被用到电信基站天线角度监测,实验证明,该系统有很好的推广和利用价值.本文中的电子罗盘固定在载体上,通过自身的加速度传感器和磁阻传感器分别测量出重力加速度在载体坐标系中的两个分量与地磁场的磁感应强度在载体坐标系中的分量,通过CPU 的处理确定出载体的具体方位,载体与水平地面间的夹角.1 电子罗盘的基本原理1.1 坐标系统地球的磁场强度为0.5~0.6 gauss,无论何地,磁场的水平分量永远指向磁北,这是所有磁罗盘的制作基础[2].传统的导航定位,通过3 个角度,即方位角α、俯仰角θ 和横滚角φ 定义了姿态参数,实际上就是载体坐标系和地理坐标系之间的方位关系.现在取两个坐标系OXYZ 与O 'X'Y'Z',OXYZ 为地理坐标系,OX在当地水平面内指向地理北极,OY 在水平面内与OX 垂直在OX 右方,OZ 与OX、OY 构成右螺旋关系,即沿重力加速度方向.方位角α 定义为沿Z 轴方向看去OXY 绕Z 轴顺时针旋转的角度为正,俯仰角θ 定义为沿Y轴方向看去OZX 绕Y 轴顺时针旋转的角度为正,横滚角φ 定义为沿X 轴方向看去OYZ 绕X 轴顺时针旋转的角度为正.O'X'Y'Z'固定在载体上,以载体质心为原点,平面直角坐标系O'X'Y'固定在载体的对称平面上,O'Z'沿由O'X'至O'Y'的右螺旋前进方向.坐标系OXYZ 先绕Y 轴转过θ,再绕X 轴旋转φ 与坐标系O'X'Y'Z'重合.要了解载体在空间的姿态,就必须测出方位角α、俯仰角θ 和横滚角φ.1.2 各各角度的测量原理加速度矢量在坐标系OXYZ 中表示为[0 0 g]T,在坐标系O'X'Y'Z'中为[g'x g'y g'z]T,根据坐标系O'X'Y'Z'、OXYZ 之间的变换关系,它们的关系为:即:由式(2)有:和由装在载体上的加速度传感器测出,将它们代入式(3)可求出俯仰角和横滚角.磁感应强度矢量在坐标系OXYZ 中表示为,在坐标系O'X'Y'Z'中为中三个量由磁阻传感器测出,根据坐标系OXYZ、O'X'Y'Z'之间的变换关系,它们之间的关系为:由式(4)求得方位角α=arctan Hx/Hy,至此载体在空间的方位由它的方位角α、俯仰角θ 和横滚角φ 完全确定.由式(2)可知载体平面法矢量为而地平面法矢量为它们的坐标基不同,将地平面坐标法矢量转换到载体坐标系中那么载体平面与地平面的夹角,则γ=arccos(cosφcosθ).2 电子罗盘系统电子罗盘的硬件原理框图如图1 所示.本系统选用MXD2020两轴重力加速度传感器Honeywell 公司的两轴磁阻传感器HMC1052L(x,y),单轴磁阻传感器HMC1021Z,分别获得载体平面的重力加速度分量和三维空间的地磁场分量,采用MSP430F247 单片机采集处理传感器信号,经过数据预处理和算法补偿后,测得载体的姿态参数并通过Rs485 传入上位机.2.1 微处理器微处理器的原理图见图2,该系统采用TI 公司的16 位RISC 结构超低功耗单片机MSP430F247 作微处理器,本处理器拥有超低功耗,片上资源丰富,拥有60 KB Flash ROM,4kB RAM,32 路通用I/O 口,8 路12-Bit A/D 转换器,10 个可捕获比较的定时计数器,两个异步通用串行口,JTAG 调试口,等外围电路,便于开发和二次开发[2-3].2.2 加速度传感器模块设计图1 电子罗盘系统框图Fig.1 Electronic compass system block diagram由原理分析可知,加速度传感器只需要X,Y 两轴便可,本设计选用MXD2020.MXD2020 所测重力加速度与Dout 输出的脉冲占空比成正比,且加速度为0 时占空比为0.5,量程因子为0.2/g[4].用MSP430F247 的TA0 测量X 轴的占空比,TA1 测量Y 轴的占空比,gx=(T1x/T2x-0.5)g/0.2=g sinθ,gy=(T1y/T2y-0.5)g/0.2=gsinφ.由此可知:每次测量开始,设为上升沿中断,时钟源1 μs,第一次中断打开计时器,并改为下降沿中断,第二次中断再改为上升沿中断,同时捕获脉冲“ON”计时值T1,第三次中断中捕获T2 计时值,并关闭中断.T1,T2 测得,代入式(6)可求得角θ,φ,与水平面真夹角.2.3 磁阻传感器设计用MSP430F247 的A0,A1,A2 对Hx',Hy',Hz'轴的磁场分量做A/D 转换,Avcc 接3.3 v 并选为Verf A/D 参考电压,精密三运放AD623 作为磁阻传感器信号放大,为区分磁场极性用一片AD623 做一精密二分压电路,将3.3v 分为1.65v 作为磁阻传感器信号放大器AD623 的参考电压 Vref. HMC1052,HMC1051 的敏感电压(sensitivity)为1.2(max)mV/V/gauss 桥路偏置电压bridge offset 为1.25 mV/V,名义电压设为0.135 mV/V 则HMC1052 ,1051 的最大输出电压为1.335×5×0.625+(1.25+0.135)×5=10.425 mV,取整为10 mV,增益Gain=1.65/0.01=165,Rg=637[5],IRF7509 组成“H”桥路对磁阻阻传感器置位/复位电路,假设置位后测得值为Mset(x,y,z),复位后测得值为Mres(x,y,z),实际磁场值为H(x,y,z)则offset(x,y,z)=Mset(x,y,z)+Mres(x,y,z)-4096,H(x,y,z)=Mset(x,y,z)-offset(x,y,z)-2048.Hx,Hy,Hz,φ,θ 前已求得,自然可求得航向角[4].图2 微处理器原理图Fig.2 The principle diagram of the microprocessor图3 加速度传感器原理图Fig.3 The principle diagram of the acceleration sensor当(Hx<0)时,航向角α=π-arcTan(Hx/Hy);当(H>0,Hy<0)时,航向角α=-arcTan(Hx/Hy);当(Hx>0,Hy>0)时,航向角α=2π-arcTan(Hx/Hy);当(Hx=0,Hy<0)时,航向角α=π/2;当(Hx=0,Hy>0)时,航向角α=3π/2.图4 X、Y 轴磁场分量测量电路Fig.4 X,Y axis magnetic field componentmeasurement circuit图5 Z 轴磁场分量测量电路Fig.5 The Z axis magnetic field component measurement circuit3 误差补偿图6 为用MATLAB 求得的误差拟合函数,其中* 为航向角误差值,曲线为拟合函数曲线,由图可知除130°与180°误差在1 度左右外,其它角度误差拟合函数相当好,f(α)=a+bsinα+ccosα+dsin2α+ecos2α(因为误码差与实测航向角的函数关系具有周期性,所以可设该函数为富里叶级数前5 项,由MATLAB 可求得a,b,c,d,e 系数)图6 航向角误差拟合函数图Fig.6 Course angle error of fitting function diagram4 结语基于Honeywell 公司生产的磁阻传感器芯片研制的电子罗盘系统抗干扰能力强、抗震性高、稳定性好;同时硬件价格低廉、成本低、功耗小.采用的基于最小二乘法位置罗差补偿法是罗盘误差补偿方法中的一种,该方法相比较神经网络误差补偿方法、椭圆拟合误差补偿方法来说,有较高的测量精度,只要计算出系统的误差补偿函数系数,罗盘系统即可实现误差补偿校正,操作简单、易于实现.实验证明该电子罗盘系统可应用在普通导航领域.参考文献:[1]刘敬彪,郑玉冰,章雪挺.三轴磁罗盘的设计与误差校正[J].自动化仪表,2008(9):10-12.[2]袁信,俞济祥,陈哲.导航系统[M].北京:航空工业出版社,1993:2-2.[3] Honeywell Application Note:AN205l[EB/OL].(2007-10-08)[2014-07-01].www.magneticsensors.com.[4] Michael J.Caruso Applications of Magneto Resistive Sensors in Navigation System[J].Sensors and Act uators,1997,21:357-342.。
基于51单片机的电子罗盘系统的设计与实现解读
本科生毕业设计(论文)论文题目:基于51系列单片机数字电子罗盘设计与实现姓名:学号:班级:年级:专业:学院:指导教师:完成时间:2013年5 月28日作者声明本人以信誉郑重声明:所呈交的学位毕业设计(论文),是本人在指导教师指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。
文中引用他人的文献、数据、图件、资料均已明确标注出,不包含他人成果及为获得东华理工大学或其他教育机构的学位或证书而使用过的材料。
对本设计(论文)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本毕业设计(论文)引起的法律结果完全由本人承担。
本毕业设计(论文)成果归东华理工大学所有。
特此声明。
毕业设计(论文)作者(签字):签字日期:年月日本人声明:该学位论文是本人指导学生完成的研究成果,已经审阅过论文的全部内容,并能够保证题目、关键词、摘要部分中英文内容的一致性和准确性。
学位论文指导教师签名:年月日基于51系列单片机数字电子罗盘设计与实现黄飞Based on 51 single-chip digital electronic compass system design and implementationHuangFeiI摘要当今社会交通越来越发达,导航系统也随之普遍。
在以前人们大多数使用地图,看路况。
但是由于经济发展,交通路线也变化好大。
现在虽然有GPS,但是在山区有覆盖遮蔽的地方,GPS也失去作用。
汽车出巡不方便,为解决这个的问题,本文主要研究使用在汽车导航设备的能够精确定向的电子罗盘系统。
本文主要介绍磁阻式电子罗盘的工作原理,并详细介绍了磁阻传感器HMC5883、双轴加速度传感器ADXL202、AD7705转换芯片以及AT89C52单片机的磁阻式电子罗盘的硬件设计;根据传感器信号输出特点,经过AD7705模数转换后,利用AT89C52单片机处理信息功能经过分析后,经显示屏显示行驶方向。
基于51单片机的电子罗盘系统的设计与实现
本科生毕业设计(论文)论文题目:基于51系列单片机数字电子罗盘设计与实现姓名:学号:班级:年级:专业:学院:指导教师:完成时间:2013年5 月28日作者声明本人以信誉郑重声明:所呈交的学位毕业设计(论文),是本人在指导教师指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。
文中引用他人的文献、数据、图件、资料均已明确标注出,不包含他人成果及为获得东华理工大学或其他教育机构的学位或证书而使用过的材料。
对本设计(论文)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本毕业设计(论文)引起的法律结果完全由本人承担。
本毕业设计(论文)成果归东华理工大学所有。
特此声明。
毕业设计(论文)作者(签字):签字日期:年月日本人声明:该学位论文是本人指导学生完成的研究成果,已经审阅过论文的全部内容,并能够保证题目、关键词、摘要部分中英文内容的一致性和准确性。
学位论文指导教师签名:年月日基于51系列单片机数字电子罗盘设计与实现黄飞Based on 51 single-chip digital electronic compass system design and implementationHuangFeiI摘要当今社会交通越来越发达,导航系统也随之普遍。
在以前人们大多数使用地图,看路况。
但是由于经济发展,交通路线也变化好大。
现在虽然有GPS,但是在山区有覆盖遮蔽的地方,GPS也失去作用。
汽车出巡不方便,为解决这个的问题,本文主要研究使用在汽车导航设备的能够精确定向的电子罗盘系统。
本文主要介绍磁阻式电子罗盘的工作原理,并详细介绍了磁阻传感器HMC5883、双轴加速度传感器ADXL202、AD7705转换芯片以及AT89C52单片机的磁阻式电子罗盘的硬件设计;根据传感器信号输出特点,经过AD7705模数转换后,利用AT89C52单片机处理信息功能经过分析后,经显示屏显示行驶方向。
数字罗盘开放性实验
基于单片机的数字罗盘设计和制作一、数字罗盘概述1、数字罗盘的特点及应用数字罗盘,在现代技术条件中电子罗盘作为导航仪器或姿态传感器已被广泛应用。
数字罗盘与传统指针式和平衡架结构罗盘相比能耗低、体积小、重量轻、精度高、可微型化,其输出信号通过处理可以实现数码显示,不仅可以用来指向,其数字信号可直接送到自动舵,控制船舶的操纵。
目前,广为使用的是三轴捷联磁阻式数字磁罗盘,这种罗盘具有抗摇动和抗振性、航向精度较高、对干扰场有电子补偿、可以集成到控制回路中进行数据链接等优点,因而广泛应用于航空、航天、机器人、航海、车辆自主导航等领域。
典型的数字罗盘具有以下特点:(1)三轴磁阻效应传感器测量平面地磁场,双轴倾角补偿。
(2)高速高精度A/D转换。
(3)内置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
(4)内置微处理器计算传感器与磁北夹角。
(5)具有简单有效的用户标校指令。
(6)具有指向零点修正功能。
(7)外壳结构防水,无磁。
电子罗盘的原理是测量地球磁场,如果在使用的环境中有除了有地球以外的磁场且这些磁场无法有效的屏蔽时,那么电子罗盘的使用就有很大的问题,这时只能考虑使用陀螺来测定航向了。
2、设计任务及要求本次设计利用51单片机开发板及电子指南针模块实现一数字罗盘的设计。
要求掌握电子指南针模块及其方位角度测量的工作原理,设计LCD显示电路及指南针模块的接口电路。
在LCD显示器上实现方位角度的实时显示。
用电子器件制作一个指南针,可以实现指引方向的作用。
有一定的抗干扰能力,可以实现蜂鸣提示的功能。
二、电路设计原理及单元模块1、设计原理目前电子罗盘按照有无倾角补偿可以分为平面电子罗盘和三维电子罗盘,也可以按照传感器的不同分为磁阻效应传感器、霍尔效应传感器和磁通门传感器。
利用磁性材料的磁阻效应制成磁性效应传感器。
磁性材料的易磁化轴、形状和磁化磁场的方向影响着其磁化方向。
图 1.1显示出,当电流流通磁性材料时,其电阻阻值大小由材料流通电流的方向与磁化方向的夹角θ决定。
基于AT89S52单片机的电子罗盘系统的设计与实现-开题报告
浙注创扌储离院本科生毕业论文(设计)开题报告题目:基于AT89S52单片机的电子罗盘系统的设计与实现学生姓名******0*** *200 ***指导教师******二级学院信息学院专业名称计算机科学与技术班级0* 计算机*班2012年3月浙江财经学院毕业论文(设计)对学生的要求1.学生应充分认识毕业论文(设计)工作的重要性,学生本人应对工作的质量负责,有高度的责任感,在规定的时间内全面完成毕业论文(设计)的各项工作,争取优异成绩。
2.学生在接到毕业论文(设计)任务书后,在领会课题的基础上,进一步了解任务的范围及涉及的素材,应向指导教师提呈调查研究提纲,查阅、收集、整理、归纳资料,学生在毕业论文(设计)中都应结合毕业论文(设计)课题进行必要的外文阅读以及完成规定的外文资料翻译和文献综述。
3.学生应在充分调研的基础上编写毕业论文(设计)工作计划,列出完成毕业论文(设计)任务所采取的方案与步骤,认真做好论文提纲。
4.学生应主动接受教师的检查与指导,定期向指导教师汇报工作进程,听取教师对?作的意见和指导。
5.学生在毕业论文(议计)工作中应充分发挥主动性傌创造性,树立实事求是的科学作风,严格遵守规章制度,要独立完成毕业论文(设计)任务,严禁抄袭。
6.学生在毕业论文(设计)答辩结束后,应亠回毕业论文(设计)的所有材料,对设计内容中涉及的有关技术资料$学生负有保密责任,未经允许不得擅自对外交流或转让,并华助做好归档工作。
摘自《浙江财经学院本科毕上论文(设计)工作管理暂行规定》、论文(设计)选题的依据(选题的目的和意义、该选题国内外的研究现状及发展趋由于GPS导航定位的不稳定性,而地磁大小和方向随地点(甚至随时间)而异,无论何地磁场的水平分量永远指向磁北,这是所有电子罗盘的制作基础,所以电子罗盘可以用于稳定的精确的汽车导航定向,电子罗盘系统的市场需求也在我国日趋明显,而且也初具规模。
其主要发展趋势概括如下:(1)制定行业规范与产业标准(2)专业分工和产业化(3)与GPS技术结合,提高系统性能,实现定位一体化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计说明书数字式电子罗盘设计学生姓名:孔垂礼学号: 1105044263 学院:计算机与控制工程专业:电气工程及其自动化指导教师:龙达峰2015 年 06 月数字式电子罗盘设计摘要数字式电子罗盘具有很多优点,例如:体积比较小、启动非常迅速、功率损耗较低、制造成本低廉等,当今社会测控技术对测向传感器提出了非常高的要求;为了提高数字罗盘的测量精度,特意设计了一种基于HMC5883L三轴磁阻传感器[1]的数字电子罗盘;在分析相关类似产品的基础上,特别强调对电源、器件选型、信号调理电路、软件设计等方面进行了分析研究,设计出了数字罗盘并且研制了试验的样机;为验证设计效果,在双轴陀螺测试转台上进行了测试,试验结果初步验证了该设计方案的可行性;论文的研究工作可以为研究和改良数字式磁罗盘的测量准确度提供可靠的资料.关键词:地磁场,数字罗盘,HMC5883L三轴磁阻传感器,重力加速度计Here is the translation of your chinese paper’s titleAbstractDigital electronic compass, has small volume, quick start, low power consumption, and low cost, the modern measurement and control technology puts forward higher requirements on sensor of direction finding; In order to improve the precision of the digital compass, we design a HMC5883L triaxial magnetic resistance sensor based digital electronic compass; On the basis of the analysis of related products, focuses on the power supply, device selection, signal conditioning circuit and software design are analyzed in aspects of research, design the digital compass and test prototype was developed; To verify the design effect, on the two-axis gyro testing table was tested, experimental results verify the feasibility of the design scheme of; Thesis research work could be used to research and provide reference for improving the measuring accuracy of digital magnetic compass.Key words : Earth's magnetic field, digital compass, HMC5883L three-axis magnetic resistance sensor, the gravity accelerometer目录摘要 (2)Abstract (3)目录...........................................................................................................................................错误!未定义书签。
1.前言 (1)2.总体方案 (3)2.1传感器的方案论证与选择 (3)2.2单片机方案的选择 (7)2.3总体方案设计思想以及框图 (7)3.硬件电路设计 (8)3.1单片机最小系统 (9)3.2 HMC5883L传感器模块 (9)3.3 ADXL202模块 (13)3.4 LCD1602液晶屏模块 (14)4.软件设计 (17)4.1 HMC5883L与单片机通信软件设计 (16)4.2 LCD1602人机界面软件设计 (17)4.3系统总统软件设计 (19)5.系统调试 (21)6.结论 (21)7.总结与体会 (21)致谢 (24)参考文献 (25)附录A:电子指南针整机电路图和实物图 (26)附录B:1602液晶模块字符存储器 (28)附录C:电子指南针程序部分源代码 (29)1.前言磁罗盘俗称指南针,它是一种简单的用来指示判别方位的东西,也是一种重要的导航仪器,指南针可应用在许多场合中。
司南是古代的四大发明之一,即指南针的前身。
它是由一根装在轴上而且可以自由旋转的磁化了的针构成的。
在地磁场作用下磁针总能平行保持在磁子午线的切线方向上。
磁针的南极指向地理的南极,通过这种现象及其性质就可以用它来辨别方向。
常用于航海、大地测量、车载导航等方面。
随着科技的发展指南针原理不断的被世人所了解,先前笨重的“司南”也逐渐发展成为现在的轻巧便捷的指南针。
但是,它最基本的原理构造是没有改变的,都还是比较粗糙精度不高的机械指南针,另外,指示的机械结构基本上也没有改变,之所以能自由的旋转都是利用某种支撑使得磁针能够受到地磁场的影响。
机械有很多不可避免的先天因素不但影响指针式指南针的便捷便携性、灵敏度、精确度等而且还影响其使用寿命。
现如今我们国家和外国在电力电子技术领域发展都非常迅猛,尤其是很多特需芯片和一些专用传感器都有了质的改变,磁传感器就是一大特例,它的发展使指南针的基本实现机理有了更高水平的发展,老式机械结构将逐步退化,目前对磁场的测量处理和指示方向都改用轻巧便捷的磁传感器和专用传感器,这就是当前应用较为广泛的电子式指南针。
电子指南针有固定的内部结构,没有活动部分,对于和其它电子系统接口连接非常简单,不但可代替旧的磁指南针。
而且精确度非常高、稳定性特别好、应用也非常广泛。
本设计采用各向异性磁阻(AMR)传感器芯片HMC5883L,它是由Honeywell公司生产的。
霍尼韦尔HMC5883L是一种有数字接口的弱磁传感器芯片,表面非直插式的高度集成模块,HMC5883L分辨率极高,HMC118X系列磁阻传感器就是其中最先进的传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校准、能使指南针精度控制在1°~2°的12位模数转换器,其I2C系列总线接口也很简单。
HMC5883L采用的各向异性磁阻(AMR)技术比其他各向异性传感器技术更先进、更有市场,特别是在轴向高灵敏度和线性高精度比较突出。
传感器之所以能够用来测量地球磁场的方向以及大小是因为它具有正交轴的低灵敏度的固相结构,其测量范围从-5高斯(gauss)到 +5 高斯(gauss),霍尼韦尔的磁传感器是一款在各方面性能都是最好的传感器,在低磁场传感器行业中享有盛誉,本文介绍了数字电子罗盘工作原理及电路硬件及软件的设计,同1.1课题研究的背景及意义早在我国战国时期我们的祖先就发现一种可以指示方向的磁石,后来人们就把磁矿石刻成像勺子一样的东西用来指示方向——司南,用于行军打仗。
随着时代的变化科技的发展,出现了各种各样的半导体材料,将各部分功能综合、整合的技术也在日益成熟,电子罗盘技术也得到迅速的发展,五花八门的电子罗盘在我们的生活当中也显而易见,尤其是在导航方面扮演着重要角色。
同时电子罗盘也广泛的应用在水平孔洞的测量、垂直孔洞的测量、水下探测、建筑物定位、设备维护、仿真系统、教育培训、虚拟现实等方面。
我们国家在数字电子罗盘方面的研究起步比较晚,国内无论是生产罗盘部件还是销售电子罗盘的厂家一般都是作为中介或者代售国外产品,国内九十年代末才开始电子罗盘的研究。
1.2国内外研究现状我们国家有很多研究和生产电子罗盘的公司,Honeywell(霍尼韦尔)公司是最为著名的公司之一,其生产的代表作是磁阻式电子罗盘,另外KVH公司生产的磁通门电子罗盘也是比较出名的。
我们国家在数字式电子罗盘的研究起步比较晚,基本上还没有形成一个完整的体系,很多厂商都是代收国外品牌。
美国目前已经研制开发出地面和空中定位精度达30m、水下定位精度优于500m的地磁导航系统,他们制造的飞航导弹和巡航专用的鱼雷命中率都有很大的提高。
另外,美已经开始用地磁感应信息来研究导弹和核武器实验,并利用E22无人机在空中进行地磁数据测量。
国内在地磁导航的研究就比较落后,虽然说已经开始研究,但是主要还集中在模拟实验和仿真阶段,据了解,某某集团三院将所测得的地磁强度数据用平均绝对差法进行了多种多样的匹配运算,其分辨率能达到50m,另外,某大学的几个教授在这方面的研究也取得了很大的进步,他们利用地磁导航校正惯性导航的仿真实验取得了较高的精度。
其它国内的大部分研究都还在停滞不前,不是仿造就是抄袭,制作电子罗盘仍停留在利用Honeywell公司的磁阻传感器上,对其产生的误差进行智能补偿也要参考大量的外文数据。
因此电子磁罗盘在我们国家内部发展空间还是很大的。
1.3本文内容概述其三利用霍尔元件。
磁通门传感器能够提供低成本、低损耗的探测方法,它由一磁芯环绕着的线圈构成,这种磁芯配备有励磁电路,但是它们整体外形体积比较大、容易破碎、等待的时间比较长。
然而霍尔效应磁传感器就有许多优点,例如:它的体积比较小,重量非常轻,功功率损耗较小,价格也不贵,连接单片机的接口电路也简单易懂,综合评价特别适用于强度很大磁场的测量。
但是,它也有众多缺点,它不够灵敏、产生的噪声较大、温度性能不好等。
虽然有些方面也能用霍尔元件经过聚磁措施或者其他手段制造出的器材来测量地磁,但这样测出的数据偏差比较大,精度不高。
磁阻传感器就具备较完美的特点,他已经做成了标准的集成芯片,并且其衍生物也成了一系列完整的体系。
而用磁阻传感器做成的电子罗盘就避开了磁通门罗盘的不足,具有体积很小、重量轻巧、精确度高、稳定性性强、应答速度快等优点,以后的电子罗盘就朝着这个方向发展了。
本文采用霍尼韦尔 HMC5883L 三轴磁阻传感器作为地磁测量的核心元件展开设计,HMC5883L是通过高度整合、集成的芯片并把它贴装在电路板上的模块,并带有能够检测很弱很弱的磁场的数字接口,在弱磁环境中就可以大显身手了,用其支撑的电子罗盘不但成本低而且和应用领域广泛。
HMC118X 系列磁阻传感器是HMC5883L 最先进的高分辨率磁阻传感器,该系列传感器自身就带有运放电路、自己能快速消除磁场干扰、自主补偿、自助驱动等,能够把精确度准确的控制在1°~2°的范围内。