数控机床坐标轴方向的确定步骤及方法实例
数控全面培训教程---数控机床的坐标系及编程规则与数控铣床(加工中心)基本操作(课题三)幻灯片PPT
(二)数控铣床仿真软件的工作窗口
数控铣仿真软件 工作窗口分为: 标题栏区、 菜单区、 工具栏区、 机床显示区、 机床操作面板区、 数控系统操作区。
1.菜单区 菜单区包含:
文件、 查看、 帮助三大菜单。
2.工具栏区 〔1〕横向工具栏
〔2〕 纵 向 工 具 栏
3.常用工具条说明
〔1〕添加刀具〔如教材图4.3所示〕:输入刀具号→输 入刀具名称→可选择端铣刀、球头刀、圆角刀、钻头、 镗刀→可定义直径、刀杆长度、转速、进给率→选确 定,即可添加到刀具管理库。
3、一个完整的加工程序由哪些局部组成?
二、新课的教学内容
(一)数控铣床〔加工中心〕仿真软件系统的 进入和退出
1、进入数控铣床〔加工中心〕仿真软件 翻开电脑,单击或双击图标 ,那么屏幕显示 教材图4.1所示。单击FANUC数控铣仿真,即进入 FANUC数控铣仿真操作。
2、退出数控铣床仿真软件 单击屏幕右上方的图标 ,那么退出数控铣 仿真系统。
16
坐标旋转有效
16
坐标旋转取消
09
深孔钻循环
09
左旋攻丝循环
09
精镗循环
09
固循环取消/外操作功能取消
09
钻、锪镗循环或外操作功能
09
钻孔循环或反镗循环
09
深孔钻循环
09
攻丝循环
09
镗孔循环
09
镗孔循环
09
背镗循环
09
镗孔循环
09
镗孔循环
03
绝对值编程
03
增量值编程
00
设坐标系最大主轴速度控制
00
〔2〕添加到主轴〔如教材图4.4所示〕:在刀具数据库 里选择所需刀具,如01刀→按住鼠标左键拉到机床刀 库上→添加到刀架上,按确定。
数控机床坐标轴方向的确定步骤及方法实例

台州亚古机床设备有限公司
数控机床坐标轴方向的确定步骤及方法实例
1.坐标轴方向的确定方法步骤:
(1)Z坐标
Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴即为Z坐标,Z坐标的正向为刀具离开工件的方向。
如果机床上有几个主轴,则选一个垂直于工件装夹平面的主轴方向为Z坐标方向;如果主轴能够摆动,则选垂直于工件装夹平面的方
向为Z坐标方向;如果机床无主轴,则选垂直于工件装夹平面的方向为Z坐标方向。
(2)X坐标
X坐标平行于工件的装夹平面,一般在水平面内。
确定X轴的方向时,要考虑两种情况:
1)如果工件做旋转运动,则刀具离开工件的方向为X坐标的正方向。
2)如果刀具做旋转运动,则分为两种情况:Z坐标水平时,观察者沿刀具主轴向工件看时,+X运动方向指向右方;Z坐标垂直时,
观察者面对刀具主轴向立柱看时,+X运动方向指向右方。
(3)Y坐标
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右手直角坐标系来确定Y坐标的方向。
图1所示为数控车床的Y坐标。
2.举例
(1)Z坐标:平行于主轴,刀具离开工件的方向为正。
(2)X坐标:Z坐标垂直,且刀具旋转,所以面对刀具主轴向立柱方向看,向右为正。
(3)Y坐标:在Z、X坐标确定后,用右手直角坐标系来确定。
数控机床坐标轴和运动方向
五、数控机床坐标轴和运动方向 JB3051—82《数字控制机床坐标和运动方向的命名》 的标准,对数控机床的坐标和运动方向作了明文规定。 1.坐标和运动方向命名的原则 . 永远假定刀具相对于静 止的工件坐标系而运动。 2.标准坐标系(机床坐标 .标准坐标系( 系)的规定 右手直角迪卡儿坐标系 如图所示。 如图所示。大拇指的方向为 轴的正方向,食指为Y X轴的正方向,食指为Y轴的 正方向。 正方向。
3.运动方向的确定 . (1)正方向:是增大工件和刀具之间的距离的方向。 )正方向:是增大工件和刀具之间的距离的方向。 (2)移动坐标方向的确定: )移动坐标方向的确定: 1) Z坐标 :由传递切削力的主轴所决定,与主轴轴 ) 坐标 由传递切削力的主轴所决定, 线平行的坐标轴即为 坐标轴即为Z坐标 线平行的坐标轴即为 坐标 。 2) X坐标 :规定 坐标为水平方向,且垂直于Z轴并 ) 坐标 规定X坐标为水平方向,且垂直于Z 坐标为水平方向 平行于工件的装夹面。 平行于工件的装夹面。 3) Y坐标:Y坐标轴垂直于 、Z坐标轴,其运动的 ) 坐标 坐标: 坐标轴垂直于 坐标轴垂直于X、 坐标轴 坐标轴, 正方向根据X和 坐标的正方向 坐标的正方向, 正方向根据 和Z坐标的正方向,按照右手直角迪 卡儿坐标系来判断。 卡儿坐标系来判断。
4.绝对坐标系与增量(相对)坐标系 .绝对坐标系与增量(相对) (1)绝对坐标系 刀具(或机床)运动轨迹的坐标值 是以相对于固定的坐标原点O给出的,即称为绝对坐标 。该坐标系为绝对坐标系。如图2-8a所示,A、B两点 的坐标均以固定的坐标原点O计算的,其值为:XA=10 ,YA=20,XB=30,YB=50。
图2-8 绝对坐标与增量坐标 a)绝对坐标 b)增量坐标
数控机床的坐标轴及各轴确立

+Z
笛卡尔直角坐标系统
右手直角坐标系(笛卡尔坐标系) 围绕X、Y、Z轴旋转的旋转进给坐标轴A、B、C则按 右手螺旋定则判定。
大拇指指向+ X、+Y、+Z坐 标轴的方向,则其余四指的 旋转方向即为+A、+B、+C
的方向。
+Y
+B +Y
+C +Z
+X
+X
+X、+Y或+Z
+A +A、+B 或 +C
+Z
② Z轴为铅垂方向 ( 立式主轴)
a.对于单立柱机床 ,从刀具向立柱看时 X 轴的正方向指向右 边。
+X
立式数控机床+x
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床)
② Z轴为铅垂方向 ( 立式主轴)
a.对于单立柱机床 ,从刀具向立柱看时 X 轴的正方向指向右 边。
+Z +X/
立式数控机床+x
X坐标轴
+Z +W
+A +C/
+X/
+Y
立式5轴数控铣床的坐标系
多轴数控机床坐标系示例
(a)卧式镗铣床
(b)六轴加工中心
卧式数控车床
X坐标轴
对于刀具旋转的机床 (如铣、钻、镗床) ① 当Z轴水平时,沿刀具 主轴向工件看,X轴的正方 向指向右边。
卧式镗床
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床) ① 当Z轴水平时,沿刀具 主轴向工件看,X轴的正方 向指向右边。
+Z +X/
数控机床坐标轴的方向与判断
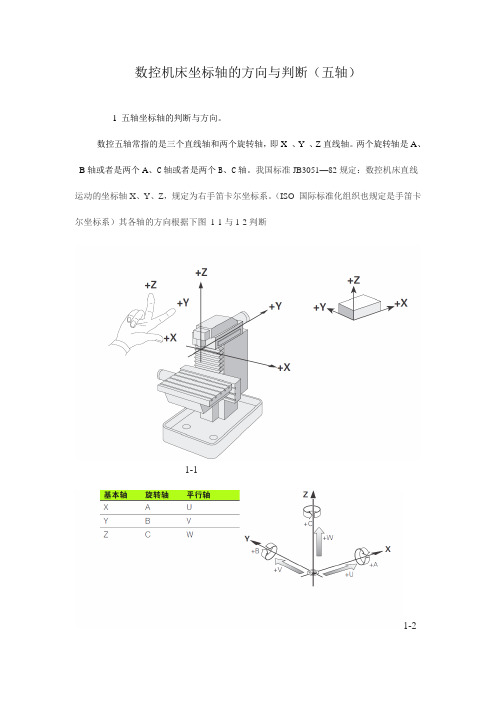
数控机床坐标轴的方向与判断(五轴)1 五轴坐标轴的判断与方向。
数控五轴常指的是三个直线轴和两个旋转轴,即X 、Y 、Z直线轴。
两个旋转轴是A、B轴或者是两个A、C轴或者是两个B、C轴。
我国标准JB3051—82规定:数控机床直线运动的坐标轴X、Y、Z,规定为右手笛卡尔坐标系。
(ISO 国际标准化组织也规定是手笛卡尔坐标系)其各轴的方向根据下图1-1与1-2判断1-11-2根据规定Z坐标一般有传递动力的主轴来规定的,即平行于机床主轴的坐标轴为Z轴。
远离工件的方向为正方向。
再根据右手笛卡尔坐标判断X轴为水平方向与工件平行,且垂直于Z轴。
剩下的那个就是Y轴。
X、Y轴的正方向都是远离工件。
那么绕着X轴旋转的轴就是A轴。
根据右手大拇指指向X轴的正方向,弯曲的四指就是旋转轴的正方向。
同理绕着Y轴旋转轴就是B轴, 绕着Z轴旋转轴就是C轴。
2旋转轴的种类。
五轴分为摇篮式和摆头式下面主要是介绍摇篮式五轴的旋转轴方向。
根据旋转的方式不同,其判断的方法也不同,本人使用过摇篮式五轴,用的是HEIDENHAIN系统。
操作面板如下:在这个操作面板上,数字2指的就是C+轴键,如果按C+根据1-2图的指是判断C轴应在XY平面内逆时针旋转,但是实际上C轴是顺时针旋转,这跟图1-2的判断是相反的,这是为什么。
这是因为跟机床有关(选择的软件有关)。
HEIDENHAIN530系统确定旋转轴手动定位的旋转方向。
TNC 不能倾斜工件坐标系,只摆动旋转轴(与机床有关)。
如果需要确定机床轴旋转方向,适用以下条件:铣头旋转轴,用右手规则。
工作台旋转轴,用左手规则。
左手规则:将左手拇指指向围绕直线轴旋转的正方向。
掌心略微弯曲:手指方向为工作台旋转轴正旋转方向。
举例:用B 轴铣头和C 轴工作台加工TNC 需使B 轴铣头摆动和C 轴工作台顺时针转动45°。
B+45: 铣头旋转轴,用右手规则C+45: 工作台旋转轴,用左手规则这说明旋转轴的判断跟机床所用系统和选装的软件有关。
数控车床坐标系

一、基本坐标系机床坐标轴:为简化编程和保证程序的通用性,对数控机床的坐标轴和方向命名制定了统一的标准,规定直线进给坐标轴用X,Y,Z表示,称基本坐标轴。
X,Y,Z坐标轴的相互关系用右手笛卡尔法则确定,如下图所示图中大拇指指向X轴的正方向,食指指向Y轴的正方向,中指指向Z轴的正方向。
小结:机床坐标系坐标轴应遵循的原则运动方向的确定刀具相对与静止工件而运动的原则,且刀具远离工件的方向为坐标轴正方向。
则坐标系用加“’”的字母表示,按相对运动关系,工件运动的正方向恰好与刀具运动的正方向相反,则有:•+X=-X′ +Y=-Y′ +Z=-Z′•+A=-A′ +B=-B′ +C=-C′确定机床坐标轴的正方向坐标轴方向的确定1、Z轴坐标的运动一般取产生切削力的主轴轴线方向为Z轴方向2、X轴坐标的运动X轴一般位于平行于工件装夹面的水平面内,且垂直于Z轴,车床上是对应刀架的径向移动方向。
3、Y轴坐标的运动Y轴(车床上通常设为虚轴)于X轴和Z轴一起构成遵循右手笛卡尔坐标系。
确定机床坐标系各坐标轴的具体方位的方法二、坐标系的类型1、机床坐标系以机床原点为坐标原点建立起来的直角坐标系称为机床坐标系。
机床坐标系是机床固有的,它是制造和调整机床的基础,也是设置工件坐标系的基础。
其坐标轴及方向按标准规定,其坐标原点的位置则由各机床生产厂设定,一般情况下,不允许用户随意变动。
刀具运动的参照坐标系机床坐标系2、工件坐标系工件坐标系也称编程坐标系,专供编程时使用,选择工件上的某一已知点为原点,建立一个新的坐标系,称为工件坐标系。
,如下图所示。
工件坐标系一旦建立便一直有效,直到被新的坐标系所代替为止。
工件坐标系编制程序所用的参照坐标系机床坐标系和工件坐标系的对比工件坐标系机床坐标系三、各个基本点及关系画龙点睛1、机床原点机床坐标系的原点又称为机床原点或机床零点,这是一个固有的点,通常有机床制造厂确定。
它是数控车床进行加工运动的基准参考点。
数控机床坐标轴的规定

数控机床坐标轴的规定在确定机床坐标轴时,一般先确定Z轴,然后确定X轴和Y轴,最后确定其它轴。
JB3051-82标准中规定,机床运动的正方向,是指增大工件和刀具之间距离的方向。
(1)Z轴Z轴的方向是由传递切削力的主轴确定的,与主轴轴线平行的坐标轴即为Z轴。
如图所示。
如果机床没有主轴,则Z轴垂直于工件装卡面。
同时规定刀具远离工件的方向作为Z轴的正方向。
例如在钻镗加工中,钻入和镗入工件的方向为Z坐标的负方向,而退出为正方向。
(2)X轴X轴是水平的,平行于工件的装卡面,且垂直于Z轴。
这是在刀具或工件定位平面内运动的主要坐标。
对于工件旋转的机床(如车床、磨床等),X坐标的方向是在工件的径向上,且平行于横滑座。
刀具离开工件旋转中心的方向为X轴正方向。
对于刀具旋转的机床(铣床、镗床、钻床等),如Z轴是垂直的,当从刀具主轴向立柱看时,X运动的正方向指向右。
如果Z轴是水平的,当从主轴向工件方向看时,主轴的正方向指向右。
(3)Y轴Y坐标轴垂直于X、Z坐标轴。
y运动的正方向根据X和Z坐标的正方向,按照右手直角笛卡儿坐标系来判断。
(4)旋转运动围绕坐标轴X、Y、Z旋转的运动,分别用A、B、C表示。
它们的正方向用右手螺旋法则判定。
(5)附加轴如果除X、Y、Z坐标以外,还有平行于它们的坐标,可分别指定为P、Q和R。
(6)工件运动时的相反方向对于工件运动而不是刀具运动的机床,必须将前述为刀具运动所作的规定,作相反的安排。
用带“’”的字母,如+Y’,表示工件相对于刀具正向运动指令。
而不带“’”的字母,如+Y,则表示刀具相对于工件负向运动指令。
二者表示的运动方向正好相反。
对于编程人员只考虑不带“’”的运动方向。
对于机床制造者,则需要考虑带“’”的运动方向。
数控铣床程序编制--刀具补偿1、刀具半径补偿:铣削加工的刀具半径补偿分为刀具半径左补偿和刀具半径右补偿。
1)刀具半径左补偿G41指令和刀具半径右补偿G42指令格式:说明:G41:左刀补(在刀具前进方向左侧补偿);G42:右刀补(在刀具前进方向右侧补偿);X、Y:刀补建立或取消的终点;D:刀具半径补偿寄存器地址字(D00~D99)2)取消刀具半径补偿G40指令说明:G40:取消刀具半径补偿。
数控机床的坐标系统
3、编程坐标系(工件坐标系)
又称工件坐标系,是编程时用来定义工 件形状和刀具相对工件运动的坐标系。 工件装夹到机床上时,应使工件坐标系 与机床坐标系的坐标轴方向保持一致。
14
3、工件原点
工件原点(编程原点):由编程人员在工件上根据编程 方便性自行设定的编制加工程序的原点。
15
设置工件原点的一般原则
工件原点与设计基准或装配基准重合,以利于编程。
工件原点尽量选在尺寸精度高、表面粗糙度小的表 面上。
工件原点最好选在工件的对称中心上。
要便于测量和检验。
16
4
坐标轴方向的确定
(1)Z坐标
Z坐标的运动方向是由传递切削动力的主轴所 决定的,即平行于主轴轴线的坐标轴即为Z坐标,Z 坐标的正向为刀具离开工件的方向。
注意:1、当机床有几个 主轴时,选一个与工件装 夹面垂直的主轴为Z坐标。 2、当机床无主轴时,选 与工件装夹面垂直的方向 为Z坐标。(牛头刨床)
思考:立式铣床中钻头钻孔 时为Z轴的哪个方向?卧式 车床Z轴正方向如何确定?
③ 对于没有回转轴或没有回转工件的机床,X轴平行于主要切削方 向,且以该方向为正方向。(牛头刨床)
8
坐标轴方向的确定
(3)Y坐标
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右 手直角坐标系来确定Y坐标的方向。
9
数控机床的两种坐标系
机床坐标系 机床原点
机床零点
编程坐标系 编程原点
10
1、机床原点
机床原点(机械原点):是指机床坐标系的原点,是机床 上的一个固定点.它不仅是在机床上建立工件坐标系的基准 点,而且还是机床调试和加工时的基准点.随着数控机床种类 型号的不同其机床原点也不同,通常车床的机床原点设在卡 盘端面与主轴中心线交点处,而铣床的机床原点则设在机床X、 Y、Z三根轴正方向的运动极限位置.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数控机床坐标轴方向的确定步骤及方法实例
1.坐标轴方向的确定方法步骤:
(1)Z坐标
Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴即为Z坐标,Z坐标的正向为离开工件的方向。
如果机床上有几个主轴,则选一个垂直于工件装夹平面的主轴方向为Z坐标方向;如果主轴能够摆动,则选垂直于工件装夹平面的方向为Z坐标方向;如果机床无主轴,则选垂直于工件装夹平面的方向为Z坐标方向。
图1.7所示为数控的Z
坐标。
数控车床的坐标系
(2)X坐标
X坐标平行于工件的装夹平面,一般在水平面内。
确定X轴的方向时,要考虑两种情况:
1)如果工件做旋转运动,则刀具离开工件的方向为X坐标的正方向。
2)如果刀具做旋转运动,则分为两种情况: Z坐标水平时,观察者沿刀具主轴向工件看时,+X运动方向指向右方;Z坐标垂直时,观察者面对刀具主轴向立柱看时,+X运动方向指向右方。
图1.7所示为数控车床的X坐标。
(3)Y坐标
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右手直角坐标系来确定Y坐标的方向。
图1.7所示为数控车床的Y坐标。
数控立式的坐标系
2.举例
例:根据图1.8所示的数控立式铣床结构图,试确定X、Y、Z直线坐标。
(1)Z坐标:平行于主轴,刀具离开工件的方向为正。
(2)X坐标:Z坐标垂直,且刀具旋转,所以面对刀具主轴向立柱方向看,向右为正。
(3)Y坐标:在Z、X坐标确定后,用右手直角坐标系来确定。
(end) 文章内容仅供参考 () ()(2011-4-27)
本文由冷镦机 风机盘管 联合整理发布。