新型电致活化材料—介电弹性体的驱动特性研究
介电弹性体发电实验研究

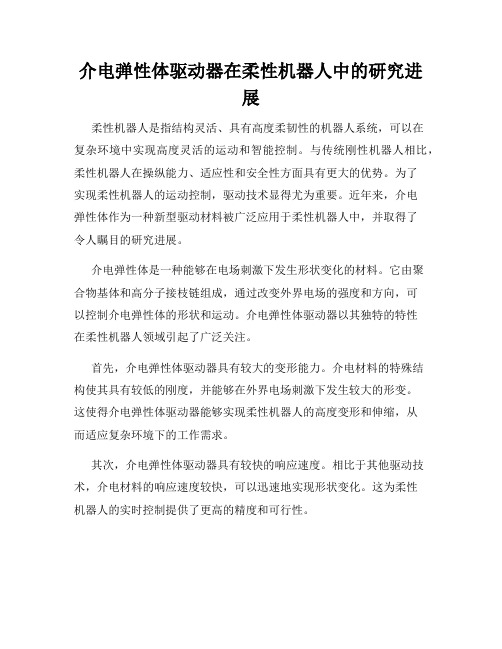
图3 实验测试电路原理图 4实验及 结果分 析 . 介电弹性体材料 的发 电利 用了可变电容原理 ,当外力作用在具有 预加 电场的介电弹性体材料上使其 变形时 , 改变 电容 即可发电 , 因此 弹 性体材料面积的改变将对发 电量产生影响 。图 4为在其 他条件相 同的 前提下 , 电极覆盖弹性体材料面积分别 为 1 e 2 5m ,5m 时 的实验 5r , c c a 2 3 结果 。在 实验中 , 泄放电阻 为 2 偏置 电压 为 10 V 材料 拉伸后 为原 G, 00 , 始材料长度 的 3 , 倍 通过实验得 出 : ) ( 材料 面积为 1c , 出电压 a 5m 时 输 高于偏置 电压 8 V ( ) 0 ;b 材料面积为 2 c 2 输 出电压高 于偏 置电压约 5 m 时, 为 10 ; ) 3 V ( 材料面积为 3c 2 , c 5 m 时 输出电压高于偏置电压约 为2 5 。由 2V 实验数据可知 , 当拉伸量一定 时, 出电荷 电压 与材料 面积成 正比。 输
研 究。
... — —
4 .— 0 . . —
科技信息
博 士 ・ 家论 坛 专
住宅在建筑之前找过 风水 师看过风水 , 住宅及 院落的主体位置 、 与 周 围关系 、 动土 时间等 的确定都是根据风水先生的要求 房屋建成之后 也请 风水先 生过 目, 并做相应 的法事。在“ 进屋 ” 前按 照习俗摆酒设宴 。 南北两 面墙 正对房 屋门 口的位 置 , 墙高逐渐升高 , 风水上有“ 在 挡煞 ” 的 寓 意。 4、 应对海南气候条件的住宅特征分析 41海南 台风概 况 . 由于海南岛地理位置的特殊性 , 平均 每年 至少都会遇见一 次台风 , 素来有 “ 台风走廊 ” 称 。据 1 5 ~ 0 3 气象 资料统 计 , 之 9 0 20 年 海南 岛 自 15 90年以来共发生有危害 的台风 8 4次 , 平均每年 1 8次 ; . 5 多年平均影 响海南的台风有 77次 , . 年均登 陆 2 . 6次。大部分 台风都是 从海南岛的
介电弹性体发电机自偏置机理研究

介电弹性体发电机自偏置机理研究介电弹性体发电机自偏置机理研究引言:随着能源需求的不断增长和能源危机的逼近,人们对可再生能源的研究越来越重视。
近年来,介电弹性体发电技术逐渐受到关注。
介电弹性体是一种具有特殊电与机械性能的材料,利用其特性可转化为电能。
介电弹性体发电机是一种利用介电弹性体的变形产生电能的装置。
本文旨在探索介电弹性体发电机自偏置的机理,进而提高其发电效率。
1. 介电弹性体发电机的原理介电弹性体发电机利用介电材料的变形产生电能。
当施加外力或者机械变形于介电材料时,产生应变,由于介电材料的电弹性效应,引起材料内部电势的变化。
这种内部电势变化将导致电荷的分离和积累,从而产生电流。
通过外部电路连接收集电荷并驱动电子设备或储存电能。
2. 介电弹性体发电机的自偏置现象自偏置现象是指介电弹性体发电机在没有施加外力的情况下仍能够产生电能的特性。
这是由于介电弹性体本身具有的非线性特性导致的。
在没有施加外力的情况下,介电弹性体发电机的内部电势处于平衡状态,电荷均匀分布。
但是当介电弹性体发电机被扭曲或施加机械压力时,介电弹性体发生变形,电势变化导致内部电荷的分离。
一旦外力移除,介电弹性体会返回原始形状,但电荷分布却不会完全恢复平衡状态,而是在一定程度上保持分离状态。
这种分离状态预先生成的电场和电势差引发了自偏置现象。
3. 自偏置机理的探究自偏置机理的探究对于进一步提高介电弹性体发电机的效率至关重要。
(1)晶格缺陷理论:晶格缺陷是介电弹性体内部自偏置现象的重要因素。
介电弹性体中晶格缺陷的产生和储存是通过超过材料内部弹性极限引起的。
晶格缺陷的产生会克服晶体的结构稳定性,因此产生电荷的能力也更大。
这个过程通常需要一定的时间来存储电荷。
(2)电迁移现象:电迁移现象是另一个影响自偏置机理的因素。
当电荷分离状态产生时,电荷首先从导电层向非导电层迁移。
电迁移速率取决于介电材料内部化学成分、材料的电导率和电场强度。
电迁移现象与晶格缺陷理论共同作用,共同影响自偏置机理。
介电弹性体驱动器在柔性机器人中的研究进展
介电弹性体驱动器在柔性机器人中的研究进展柔性机器人是指结构灵活、具有高度柔韧性的机器人系统,可以在复杂环境中实现高度灵活的运动和智能控制。
与传统刚性机器人相比,柔性机器人在操纵能力、适应性和安全性方面具有更大的优势。
为了实现柔性机器人的运动控制,驱动技术显得尤为重要。
近年来,介电弹性体作为一种新型驱动材料被广泛应用于柔性机器人中,并取得了令人瞩目的研究进展。
介电弹性体是一种能够在电场刺激下发生形状变化的材料。
它由聚合物基体和高分子接枝链组成,通过改变外界电场的强度和方向,可以控制介电弹性体的形状和运动。
介电弹性体驱动器以其独特的特性在柔性机器人领域引起了广泛关注。
首先,介电弹性体驱动器具有较大的变形能力。
介电材料的特殊结构使其具有较低的刚度,并能够在外界电场刺激下发生较大的形变。
这使得介电弹性体驱动器能够实现柔性机器人的高度变形和伸缩,从而适应复杂环境下的工作需求。
其次,介电弹性体驱动器具有较快的响应速度。
相比于其他驱动技术,介电材料的响应速度较快,可以迅速地实现形状变化。
这为柔性机器人的实时控制提供了更高的精度和可行性。
此外,介电弹性体驱动器具有较低的噪音和振动水平。
由于介电材料的柔软性和高度可变性,介电弹性体驱动器在运动过程中产生的噪音和振动较小,使得柔性机器人能够在噪音敏感的环境中进行工作。
另外,介电弹性体驱动器还具有较低的功耗。
介电材料驱动的柔性机器人不需要大量能量来实现运动,相比于传统的机械驱动,其能耗更低,更加节能环保。
然而,介电弹性体驱动器也存在一些挑战和限制。
首先,介电材料的稳定性和寿命问题是目前研究的热点之一。
由于介电材料在长时间使用和多次形变后容易出现疲劳和破损,这限制了柔性机器人的长期可靠性和稳定性。
其次,介电弹性体驱动器在控制方面还存在一定的挑战。
由于介电材料的非线性和耦合特性,对其进行精确的建模和控制仍然是一个难点。
因此,如何实现介电弹性体驱动器的精准控制仍然需要进一步的研究和探索。
新型电致活化材料—介电弹性体的驱动特性研究
( 浙江 师范 大学 工 学 院 , 江 金 华 3 10 ) 浙 2 04
摘要 : 为解决微型致动器 、 人造肌 肉、 仿生机器人等新 型科技研究 领域短 缺问题 , 电活性 聚合 物材料一介 电弹性 体应用 于新型 驱 将
动器研 究 中, 开展 了对 弹性体材料驱 动特性 的相关 分析。通 过实验研究 了影 响 EA E材料激 活区 ( —C 电极涂层 区域 ) 面积 应变 的主
T ruhepr e t, h a hog xe m ns tem i i n ̄c r o f t gE A Em tr c v oe(lc oecaig ei a)ae ri eersace .T e t f f c n ・ C ae a at e n e t d ot g n 1 ras a w r erhd h o s ae i i l i z er nr o t n e
第2 8卷第 1 0期
21 0 1年 1 0月
机
电
工
程
Vo . 8 N . 0 12 o 1
0c .201 1
Ju a fMe h ncl& E et c lE gn e n o rl o c a ia n lcr a n ie r g i i
新 型 电致 活化 材 料一 介 电弹性体 的驱 动特 性研 究 木
要因素 , 以寻找激 活区面积应变 和这些影 响因素之 间的关系 , 进而根 据它们之 间的关 系确 定能获 得所需激 活 区面积应变 的合适 条
件。实 验结果显示 : 不论单轴预拉伸还是 双轴 的均 匀与非均匀预拉伸 , 对激活 区面积应变 影响 的总趋势都 是随着 拉伸量 的增大 先 增 大后 减小 。而激活区面积应 变随着外加电压的增加而增大 , 随着激活 区与窗 口半 径 比的增大 而减小 。通过 分析实 验结果 发现 , 寻找合适 的条件对激活区产生所需的面积应变很重要 。 关键 词 : 电弹性体 ; 介 电活性聚合物材料 ; 驱动器 ; 实验研究
新型人工关节驱动器材料研究

新 型 人 工 关节 驱动 器材 料 研 究 ①
王莉 高春 甫 郑华 君 杨嵘 ( 浙江 师范大学 浙江 金华 3 1 0 ) 2 4 0
电弹 性 体 中的 硅树 脂 和 丙 烯 酸弹 性 体 作 为
人 工关 节 驱 动 器 材料 , 所 有E P 中表现 在 A s 出 最 好 的 整 体 性 能 , 用 硅 树 脂 弹 性 体 已 利
经获 得 高 达 l % 的驱 动 应 变 , 用丙 烯 酸 7 1 利 弹性 体 获 得 了高 达 2 l 5%的 驱动 应 变 。 用 利 硅 树 脂 和 丙烯 酸弹 性 体 已经证 明可 以 得 到 8 a 驱动 压 力和3 / m MP 的 J c 的能 量密 度 。 这 与它 们 的 快 的 反应 速 度 和 潜 在 的高 的 效率 相 耦 合 , 为 开 发 机 械 肌 肉 的 有 吸 引 力 的 成 材料 。 电弹 性 体材 料 与其 它 人 工关 节 驱 1介
点 , 同时 也 存 在 着难 于 控 制 , 应 慢 , 但 反 随 而 体 积 庞 大 。 弹 性 体 聚 合 体 夹 在 两 层 柔 顺 电极 中 应 变的 不 同 , 几 百 到 几百 万 个 循 环后 , 在 材 EAPs 分 为两 类 : 可 离子型 和 电子 型 。 电 间 , 者 紧 密接 触 。 两个 电极 之 间施 加 电 三 在 料 的形 状 记 忆效 应 明 显变 差 及 仅适 于 小 尺 子 型 E P 一般 由 电场 或 库 仑 力 驱 动 , 子 压 差 将 引起 反 向 电荷 相 互 吸 引 , 同 向 电 A s 离 而 度 应 用等 许 多 问 题 。 型E s AP 由离子 的移 动 及扩 散 驱动 。 EAPs 主 荷相 互 排 斥 。 从而 导 致 薄膜 的厚 度 收缩 , 而 压 电 陶 瓷 也 可 作 为 人 工关 节 驱动 器的 要 分 类 如 表 1 示 。 所 面 积 扩 大 。 电弹 性 体 仅 仅 改 变 形 状 而 保 介
基于Neo-Hooken的介电弹性体单轴拉伸发电特性研究

农 业 机 械 学 报
doi:10.6041/j.issn.1000—1298.2016.03.055
第47卷第3期
基
的介 电弹性体 单轴拉伸发 电刘 爱 飞 金 丽 丽 江 孝 琪
(浙 江 师 范 大 学 工 学 院 ,金 华 321000)
electrom echanical coupling model
引 言
介 电 弹 性 体 发 电 机 (Dielectric elastomer generator,DEG)是 一种 基于 可变 电容原 理 的新 型 微
发 电机 … ,其 三层 式构 造 的 中问层 为 介 电弹性 体 材 料 (DE)。作 为一 种 新 型 智 能材 料 ,DE具 有超 大 变 形 、高 理论 比能量 密 度 、高 效 率 、超 短 反 应 时 间及 高 疲 劳 寿命 等特 点 。众 多研究 表 明 ,DE既是 一 种
Power Generating Characteristics of Uniaxial Tensile for DEG Based on Neo ——H ooken M odei
Cao Jianbo Ge Caijun E Shiju Liu Aifei Jin Lili Jiang Xiaoqi
摘 要 :为研 究 介 电 弹性 体 发 电机 (DEG)在 单 轴 拉 伸 下 的发 电特 性 ,结 合 Neo—Hooken模 型建 立 了 DEG在 单 轴 拉 伸 下 的 机 电 耦 合 数 学 模 型 ,运 用 Matlab/Simulink软 件 建 立 了 DEG 的 单 轴 发 电仿 真 模 型 ,对 DEG 的 发 电过 程 及 拉 伸 力 、拉 伸 率 、初 始 电压 与 电势 差 之 间 的关 系进 行 了仿 真研 究 ,通 过 搭 建 DEG发 电 测 试 试 验 台 ,进 行 了 试 验 研 究 并 与 仿 真 结果 进 行 对 比 。仿 真 和试 验 结 果 表 明在 单 轴 拉 伸 收 缩 发 电过 程 中 ,DEG两 端 电 压 先 降 后 升 ;在 初 始 拉 伸 时 和 即将 拉 伸 至最 大 时 电压 有 两 个 突变 点 ;电 势 差 随 着 初 始 电压 、拉 伸 力 的增 加 而近 似线 性 增 加 。 关 键 词 :介 电 弹 性 体 发 电 机 ;单 轴 拉 伸 ;发 电 机 理 ;机 电耦 合 模 型 中 图分 类 号 :TB381 文献 标 识 码 :A 文 章 编 号 :1000.1298(2016)03—0389-06
文献查阅节点弹性体综述

介电弹性体最近的一些研究进展姓名:欧阳一鸣学号:2013012532班级:高材13131引言电活性聚合物是指在外界电场刺激下产生显著的尺寸或者形状变化的一类新型驱动器材料。
介电弹性体是一种电活性聚合物,与传统典型的电活性聚合物相比,具有显著的优异性能,包括大电致形变(>10%)、能量密度高(3.4J/cm)、响应时间短(ms)、粘弹滞后(力学)损耗小、柔韧性更好(弹性模量Y可低至0.1MPa)和高转换效率(80%~90%)的特点。
由涂覆在弹性体上下表面柔性电极组成的三明治结构的介电弹性体驱动器,可以广泛应用于袖珍或微型机器人、微型航空器、磁盘驱动器、平面扩音器和假肢器官等领域,被称为是新一代电活性驱动器。
2基于热力学框架的连续介质理论进展美国哈佛大学的锁志刚教授等人从软材料的力学角度出发,基于热力学的理论框架与连续介质力学模型,建立了介电弹性体理论.3.介电弹性体在能量收集领域的研究进展介电弹性体作为一种智能软材料,人们对于它的研究是在近十几年左右才兴起的。
随着介电弹性体越来越广泛的发展和应用,从事该领域研究的人员和机构也越来越多,例如美国的斯坦福研究院(SRIInternational)、欧洲的爱尔兰、英国、意大利等国家及日本一些公司。
相比于介电弹性体在驱动器方面的研究,其在能量收集这一应用领域的研究成果并不是很丰硕。
在理论方面,美国哈佛大学的锁志刚教授等人从软材料的力学角度出发,基于热力学的理论框架与连续介质力学模型,建立了介电弹性体理论。
基于此理论体系,近年来许多学者在介电弹性体能量收集方面取得了一些理论成果,主要集中在许用区域与能量耗散两方面。
4.高电致形变介电弹性体的研究进展电活性聚合物是指在电刺激下能够产生较大尺寸或形状变化的聚合物材料,正作为新型的驱动器材料被广泛地研究!介电弹性体是有高介电常数的弹性体材料,对其施加外电场后可以改变形状或体积,撤销外加电场后会恢复到原来的形状或体积,这个过程伴随着应力和应变的产生,从而将电能转化为机械能,是一种性能优异的电活性聚合物!与传统典型的电活性聚合物相比,介电弹性体具有大电致形变"能量密度高"响应时间快"粘弹滞后(力学)损耗小"高转换效率的特点!由涂覆在弹性体上下表面柔性电极组成的三明治结构的介电弹性体驱动器,可以广泛应用于袖珍或微型机器人"微型航空器"磁盘驱动器"平面扩音器和假肢器官等领域,被称为是新一代电活性驱动器5.生物基本体聚酯介电弹性体传统的介电弹性体均不同时具备高的介电常数和低的模量。
介电弹性体驱动器动态电压下的变形特征及击穿行为研究
第53卷第2期 2019年2月西安交通大学学报JOURNAL OF XP AN JIAOTONG UNIVERSITY V〇l. 53 N o.2F e b.2019DOI:10. 7652/xjtuxb201902002介电弹性体驱动器动态电压下的变形特征及击穿行为研究刘学婧%,贾书海%,李博%&,陈花玲123(1.西安交通大学机械工程学院,710049,西安'2.西安交通大学陕西省智能机器人重点实验室,H0049,西安'3.西安交通大学机械强度与振动国家重点实验室,710049,西安)摘要:针对介电弹性体(D E)驱动器驱动性能难以预测的问题,以V H B4910薄膜为待测D E材料,圆形D E驱动器作为研究对象,针对低频条件下(0. 1!10H z)D E驱动器的动态变形与击穿行为展 开了实验研究。
搭建了力电耦合实验测试平台,通过实验归纳了驱动电压参数对D E驱动器动态 变形和击穿的影响规律。
实验结果表明:D E驱动器的动态变形平衡位置受到电压幅值的影响,动 态变形的振幅则受到电压频率和幅值的共同制约。
动态击穿电压的数值分散性强,难以得到明显 的规律特征,因此不能准确对动态击穿行为进行表征,而通过实验发现D E驱动器能承受的电压循 环周期数会受到多种驱动电压参数的显著影响,故提出采用电压循环周期数对动态击穿行为进行分析。
借鉴机械循环载荷下的经典疲劳曲线方程,提出利用名义静电应力幅值代替机械应力幅值、对D E驱动器在动态电压下的电致疲劳寿命曲线进行拟合的方法,以期为动态电压作用下D E驱 动器的寿命预测提供一种新思路。
关键词:介电弹性体驱动器;动态变形;击穿;疲劳寿命中图分类号:T H145. 4;T P24 文献标志码:A文章编号:0253-987X(2019)02-0009-07A Research on Deformation and Breakdown Behavior of DielectricElastomer Actuators Under Dynamic Electrical LoadsL l U X u e j i n g1,J I A S h u h a i1,LI B o1'2,C H E N Hualing1'2'3(1. School of Mechanical Engineering,X i?an Jiaotong University,X i?an 710049,China;2. Shaanxi Key Laboratory of Intelligent Robot,X i?an Jiaotong University,X i?an 710049,China;3. State Key Laboratory for Strength and Vibration of Mechanical Structures,X i?an Jiaotong University,X i?an 710049,China)Abstract:Dielectric e lastomer based actuators(D E A s)is regularly subjected to dynamic electric loads to produce reciprocating deformations and its driving performance such as deformation response and b r e a k d o w n behavior i s affected by various driving voltage parameters.T h e relevant changing laws are unrevealed,and i t i s difficult to predict its critical b r e a k d o w n condition in applications.T h e dynamic deformation and b r e a k d o w n behaviors of circular D E A s based on V H B4910 film are experimentaly investigated,and the changing rules of driving voltage parameters on the dynamic deformation and b r e a k d o w n behavior of D E A are s u m m a r i z e d.T h e experimental results s h o w t h a t t h e dynamic deforma t i o n equilibrium pos i t i o ns of t h e D E A s are affect e d b y the voltage amplitude and the deformation amplitudes are influenced by both the frequency and amplitude of the voltage.M o r e o v e r the dynamic b r e a k d o w n vol t a ges of D E A s收稿日期:2018-06-23。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新型电致活化材料—介电弹性体的驱动特性研究欧阳杰;胡意立【摘要】In order to solve the problems of shortage in new technology area, such as actuator, artificial muscle,bio-robot etc. , the electroac-tive polymeric materials -electric-acrylic elastomer was investigated. The analysis of the driver characteristics of dielectric elastomer was done. Through experiments, the main factors of affecting E-ACE material active zone (electrode coating regional) area strain were researched. The relationships between active zone area strain and these influencing factors were found out . Thereby appropriate conditions which can get required active zone area strain were determined according to relationships between them. The results show that: whether uniaxial pre-stretching or the uniform and non-uniform biaxial pre-stretching, the general trend of the effects of the active zone area strain are increased first and then decreased with the amount of stretching increases. The active zone area strain is increased with increasing applied voltage, reduced with the active zone and the window radius ratio increasing. By analyzing the experimental results, it shows that search for suitable conditions on the active zone to generate the required area strain is very important.%为解决微型致动器、人造肌肉、仿生机器人等新型科技研究领域短缺问题,将电活性聚合物材料—介电弹性体应用于新型驱动器研究中,开展了对弹性体材料驱动特性的相关分析.通过实验研究了影响E-ACE材料激活区(电极涂层区域)面积应变的主要因素,以寻找激活区面积应变和这些影响因素之间的关系,进而根据它们之间的关系确定能获得所需激活区面积应变的合适条件.实验结果显示:不论单轴预拉伸还是双轴的均匀与非均匀预拉伸,对激活区面积应变影响的总趋势都是随着拉伸量的增大先增大后减小.而激活区面积应变随着外加电压的增加而增大,随着激活区与窗口半径比的增大而减小.通过分析实验结果发现,寻找合适的条件对激活区产生所需的面积应变很重要.【期刊名称】《机电工程》【年(卷),期】2011(028)010【总页数】4页(P1203-1205,1221)【关键词】介电弹性体;电活性聚合物材料;驱动器;实验研究【作者】欧阳杰;胡意立【作者单位】浙江师范大学工学院,浙江金华321004;浙江师范大学工学院,浙江金华321004【正文语种】中文【中图分类】TH14电活性聚合物的种类包括:导电橡胶、离子交换膜金属复合材料、凝胶体、纳米管及介电弹性体等。
其中介电弹性体被认为是最具前景的一类材料,其中以丙烯酸弹性体和硅树脂弹性体最具有代表性。
此种介电弹性体既可正向使用,其特性柔软、质量轻,被称为人造肌肉[1],在未来新一代柔性致动器、传感器领域极富应用潜力,例如可用于微小型机械、机器人,尤其是仿生机器人的柔性电致动。
该类材料具有和生物肌肉类似的许多优良特性,从而可以取代传统材料被大量应用于柔性机器人、医疗、仿生机械等领域。
还由于其具有重量轻、能耗低、价格便宜等优点可以应用于微型六腿机器人、微泵、微阀门等微型机械领域。
目前,对介电弹性体材料的研究主要集中在驱动领域,但是我国在该领域开展的研究很少。
本研究主要探讨新型电致活化材料—介电弹性体的驱动特性。
介电弹性体的变形主要是由电极在电场中产生的静电力(即麦克斯韦力)产生的。
上下表面受到外部压力作用,介电弹性体是在丙烯酸或硅树脂等弹性体材料基质的上下表面渗入屈从电极材料(如碳或石墨等)而形成的、基于麦克斯韦效应的一种新型电活性聚合物材料。
由此,介电弹性体的发电原理可简化为如图1所示,即可看作可变电容装置[2-3]。
在伸展状态下(大电容)电荷注入到介电弹性体薄膜电极上。
当在外力作用下紧缩弛豫时(小电容),弹性体材料的弹性应力抵抗电场力,提高了电能。
从微观上看,厚度增加时,由于异性电荷被推离,同性电荷被压缩靠近,提高了电荷电压。
可见,当外力作用在具有预加电压的介电弹性体上使其变形时,通过电容的改变即可发电,变形越大,发电能力越强。
而介电弹性体的发电过程即为介电弹性体的伸展与弛豫的交替过程。
介电弹性体制作的致动器,应用在蛇形机器人中(如图2所示),可提高该种机器人的技巧和灵活度,同时还可以降低制作成本,以及简化机器人的复杂度。
再者,可以提高蛇形机器人的集中度,减少能量的消耗。
这将是未来机器人研究中不可缺少的一部分,将是机器人优化的重要一步[4-6]。
介电弹性体制作的致动器可以用于扑翼飞行器(如图3所示)的制造。
该种飞行器可以在复杂的环境中悬停缓慢的飞行,控制简单,和常规推进电源系统相比,该机器有着更好的稳定性和可控性,而且发出的噪音很小,外观符合自然风格,具有很强的隐蔽性,可以应用于军事、航空等。
另外介电体材料也可用于机翼设计和运动车辆配置,动力和控制拍打机制和驱动材料。
实验材料:丙烯酸膜、石墨粉、硅胶、硅油、正庚烷。
实验设备及仪器:WWL-LSG31精密线性高压大功率直流稳压稳流电源、CCD激光位移传感器LK-G系列、万用表、保护电阻、引出电极(铜片)、绝缘胶布、绝缘塑料板、绝缘底座、数码相机等等一系列实验相关配套器材。
本研究将丙烯酸聚合物薄膜预拉伸一定比例后粘在绝缘塑料板上,再将准备好的圆形塑料电极模板分别粘在预拉伸好的薄膜正反两表面,然后将中央圆形部分涂上电极材料,再用条状铜片作为引出电极分别粘在两表面,最后将绝缘塑料板固定在绝缘底座上,并与高压直流电源相连(实验装置如图4所示)。
在实验中本研究将数码相机固定在三角架上,记录实验现象,用基于B样条小波的图像边缘提取技术对采集的图像进行处理,然后再利用CAD软件本身自带的面积计算功能计算出激活区域在变形前后的面积,从而再比较精确的计算出面积应变。
实验过程中将电压慢慢加至薄膜崩溃或者出现明显皱褶为止,用摄相机记录下整个变化过程,便于以后处理数据。
薄膜通电前后的变形图如图5所示。
3.3.1 不同预拉伸与面积应变的关系预拉伸分单轴预拉伸和双轴预拉伸,单轴预拉伸指在一条直线上将薄膜进行一定比例的预拉伸,比如100%的单轴预拉伸是指将薄膜在某一方向上的长度拉伸到原来的2倍。
而双轴预拉伸指在互相垂直的两条直线方向上将薄膜进行一定比例的预拉伸。
3.3.2 单轴预拉伸对面积应变的影响单轴预拉伸产生的面积应变比较小,但在一定预拉伸范围内,总体上的趋势是面积应变随着预拉伸量的增大先是增大,随后会减小,说明激活区的面积应变在变化过程中有拐点,如图6所示。
即激活区在没有预拉伸的方向上比预拉伸方向上变化更大一些,这是由于在没有预拉伸方向上比预拉伸方向上激活区的应变潜力更大一些(弹性体薄膜在保持超弹性的基础上其总应变是有限度的),所以其在没有预应变的方向上变化更大一些。
3.3.3 双轴预拉伸对面积应变的影响双轴预拉伸又分为均匀双轴预拉伸和非均匀双轴预拉伸。
均匀双轴预拉伸指在两个方向上的预拉伸量相同,反之,非均匀预拉伸指在两个方向上的预拉伸量不同。
首先,本研究考虑均匀预拉伸对激活区面积应变的影响。
激活区面积应变的大小是随着预拉伸的增大还是先增大,后来又慢慢减小,即在变化过程中存在拐点,如图6所示,并且根据实验数据可以确定激活区的面积应变出现拐点的位置在预拉伸为200%的时候。
激活区的面积应变之所以会出现拐点是由于薄膜本身的应变是有限的,当其应变超过其极限值时薄膜就会破裂,所以当其预应变达到某一值时必然会出现最大面积应变,即会出现拐点。
3.3.4 外加电压与面积应变的关系外加电压对激活区面积的应变影响是很大的,总体是激活区的面积应变随着外加电压的增大而增大,薄膜在预拉伸为一定值时其激活区面积应变随着外加电压的变化情况如图7所示。
从图中可以看出激活区面积应变的非线性变化随着外加电压的增大越来越明显。
出现这种现象的原因是薄膜不是完全理想的弹性体,并非理想的不可压缩,而且随着应变的增大薄膜的各向异性也越明显,导致麦克斯韦力与薄膜内应力之间的不平衡,使得激活区面积应变产生了明显的非线性变化,最后还会导致薄膜表面出现皱褶甚至破裂。
3.3.5 激活区与窗口半径比与面积应变的关系激活区与窗口半径比对激活区面积应变的影响也比较大,二者比例越小,激活区的面积应变越大,如图8所示。
这是由于二者比例越小,非激活区的面积相对越大,其内部储存的能量也越大,产生的应力也就越大,所以激活区越容易被非激活区拉伸,拉伸也越充分,故其面积应变也就越大。
从图中可以看出,当二者的比例小于1:8,即0.125时,非激活区的面积可以看做无限大,二者比例对激活区面积应变影响很小,可以忽略不计,进而可以近似认为二者的比例对其没有影响。
不论薄膜是单轴预拉伸还是双轴的均匀与非均匀预拉伸,对激活区面积应变的影响的总趋势都是类似的,随着拉伸量的增大,先增大后减小,即存在拐点,进而说明薄膜在外加电压的作用下要产生最大的应变需要合适的预拉伸,而不是预拉伸越大越好。
在本研究中,通过实验可以发现,激活区与窗口半径比在一定比例范围内对面积应变的影响比较大,当二者比例小于某一值时其对面积应变的影响很小,可以忽略不计。