《飞行管理问题》
利用分治法求解空中飞行管理问题
维空间的情况。
ql 2 2 的 2 区间 (' ,/] (' l,l 一q ¨ p 个 /一 / / , / 、 /, ' / , / / , /+ / ]中最多各有 S中的一 个点,所 以这两个点 ' / , 之间的距离有可能是 S中的最 短距离 。二维情况
如图 l 所示把二维集合 S中的r个点投影到 t
第4 期
利用分治法求解空中飞行管理问题
s,从平衡子问题的角度考虑 ,尽量使每个集合 中 2
的元素个数相同,然后按照上述方法递归求解每个
集合 中最近的点 。
l pi S) =a r( 1,
2 pi S) =a r( 2 ;
P=m ( 1,q rn ( 2 ; S) a s) i
维普资讯
浙江交通职业技术学院学报,第 7 卷第4 期, 06 1 20 4 2月
Ju a Z e mgTasoti o ee om l  ̄ hj r prt n lg o i n ao C l
V 17 N . D e2 O o . o4, e .O 6
/ 搜 寻点 / 在集合 S 和 S 最邻 近的点 P和 / 7 , l 2
g /
上述方法中最关键的问题是集合 s 和 s 的合 l 2 并问题 ,因为集合 s 和 s 的最接近点对未必就是 l 2 集合 s的最接近点对 。如果组成 s的最接近点对 的2 个点都在集合 s 或 s 中,则 问题容易解决 。 1 2 但是 ,如果这 2 个点一个在 S 中,一个在 S 中, l 2
轴上,对应 n个实数 l 2 ,x ,… ,点 m取 n个
点坐标的中位数 ,这样集合 s分成 2 个子集 S = l
{f f Pl ≤m}和 S = {fq>m} P 2 qli 。分别用 P 、q 表
数学建模飞行管理问题
数学建模飞行管理问题引言在现代航空领域,航班的飞行管理是一个极其重要的问题。
飞行管理的目标是确保航班的安全、高效和准时到达目的地。
为了实现这一目标,数学建模在航班飞行管理中发挥着关键作用。
本文将探讨数学建模在飞行管理问题中的应用,并给出相应的示例和解决方案。
数学建模在飞行管理中的应用航班路径规划在飞行管理中,航班路径规划是一个重要的环节。
通过数学建模,我们可以确定最佳的航班路径,以确保航班的安全和高效。
航班路径规划的主要目标是最小化飞行时间、燃料消耗以及减少碳排放量。
数学建模中,我们可以考虑以下因素来确定最佳航班路径:•风速和风向:考虑风速和风向对飞行速度的影响,选择最佳的飞行高度和航线。
•气温和气压:考虑气温和气压对飞行性能的影响,选择最佳的飞行高度和速度。
•气象条件:考虑降雨、雷雨和大风等天气情况对航班安全的影响,调整航班路径避开恶劣天气区域。
•空中交通管制:考虑航空交通管制对航班路径的限制,避免空中拥堵。
航班调度与资源分配航班调度和资源分配是飞行管理中另一个重要的问题。
通过数学建模,我们可以优化航班的调度和资源的分配,以确保航班的准时到达和高效运作。
航班调度和资源分配的主要目标是最大化机场和航空公司的资源利用率。
在数学建模中,我们可以考虑以下因素来优化航班调度和资源分配:•航班数量和航班时刻表:根据乘客需求和机场容量,确定最佳的航班数量和时刻表。
•登机口和登机桥分配:根据航班的到达时间和登机口的可用性,分配最佳的登机口和登机桥,以减少登机和下机的时间。
•地面设备和人员分配:根据航班的需要,合理分配地面设备和人员,以确保航班的准时运作。
示例和解决方案为了更好地理解数学建模在飞行管理中的应用,我们将给出一个具体的示例和相应的解决方案。
航班路径规划示例假设有一架航班从A城市飞往B城市,我们需要确定最佳的航班路径以最小化飞行时间和燃料消耗。
根据数学建模,我们可以考虑以下因素来确定最佳航班路径:•风速和风向:通过获取实时的风速和风向数据,我们可以计算出不同高度上的风向风速情况,并选择最佳的飞行高度和航线。
飞行区安全运行管理存在的问题及对策

飞行区安全运行管理存在的问题及对策摘要::一、引言二、飞行区安全运行管理存在的问题1.安全理念不够先进2.管理体制不健全3.人员素质不高4.设备设施不完善三、飞行区安全运行管理的对策1.加强安全管理理念的宣传教育2.完善管理体制,明确职责分工3.提高人员素质,加强培训4.完善设备设施,提高设备完好率四、总结第二步,按照,详细具体地写一篇文章。
正文:飞行区安全运行管理是机场运行管理的重要组成部分,涉及到机场的安全、效率和正常性。
然而,当前我国飞行区安全运行管理存在一些问题,需要采取有效措施加以解决。
首先,安全理念不够先进。
在飞行区安全运行管理中,一些管理人员和工作人员的安全理念还停留在传统的阶段,没有及时更新。
这导致了对新情况、新问题的应对能力不足,难以有效预防事故的发生。
其次,管理体制不健全。
在飞行区安全运行管理中,一些机场的管理体制还不够完善,职责分工不明确,导致工作效果不佳。
例如,在航班运行过程中,航班调度员、机务维修人员、安检人员等职责分工不清晰,容易出现漏洞和问题。
第三,人员素质不高。
飞行区安全运行管理需要专业人才,但是目前一些机场的工作人员素质不高,缺乏专业知识和技能。
这导致了对设备设施的使用不当,影响了飞行区的安全运行。
最后,设备设施不完善。
一些机场的设备设施还不够完善,难以满足安全运行的需求。
例如,一些机场的跑道灯光、导航设备等设施老化,影响了航班的正常起降。
针对以上问题,我们需要采取有效措施加以解决。
首先,要加强安全管理理念的宣传教育,使管理人员和工作人员树立先进的安全理念。
其次,要完善管理体制,明确职责分工,提高工作效果。
第三,要提高人员素质,加强培训,使工作人员具备专业知识和技能。
最后,要完善设备设施,提高设备完好率,确保飞行区的安全运行。
总结起来,飞行区安全运行管理是我国机场运行管理的重要组成部分,当前存在一些问题,需要采取有效措施加以解决。
飞行区安全运行管理存在的问题及对策

飞行区安全运行管理存在的问题及对策摘要:一、引言二、飞行区安全运行管理存在的问题1.飞行区安全意识不足2.安全管理制度不健全3.安全监管不到位4.应急处理能力不足三、对策与建议1.加强飞行区安全意识培训2.完善安全管理制度3.加强安全监管力度4.提高应急处理能力四、结论正文:一、引言飞行区安全运行管理是机场安全保障的重要组成部分,对于维护机场运行安全、保障航班正常起降具有重要意义。
然而,在实际运行过程中,飞行区安全运行管理仍存在一些问题,需采取有效对策加以解决。
二、飞行区安全运行管理存在的问题1.飞行区安全意识不足:部分机场管理人员及一线工作人员对飞行区安全运行管理的重要性认识不足,缺乏足够的安全意识,存在侥幸心理。
2.安全管理制度不健全:一些机场在飞行区安全管理制度建设方面存在不足,制度不完善,无法为实际工作提供有效的指导。
3.安全监管不到位:在飞行区安全运行管理过程中,监管力度不够,导致安全隐患不能及时发现和排除。
4.应急处理能力不足:在发生突发事件时,部分机场的应急处理能力不足,无法迅速、有效地应对。
三、对策与建议1.加强飞行区安全意识培训:机场管理部门应加强对全体工作人员的安全意识培训,提高其对飞行区安全运行管理的重视程度,确保每个工作人员都具备较强的安全意识。
2.完善安全管理制度:机场管理部门应不断完善飞行区安全管理制度,确保制度健全、有效,为飞行区安全运行管理提供有力的制度保障。
3.加强安全监管力度:机场管理部门应加大安全监管力度,定期开展安全检查,确保飞行区安全运行管理各项制度和措施得到有效落实。
4.提高应急处理能力:机场管理部门应加强应急预案的制定和演练,提高应对突发事件的能力,确保在发生突发情况时能够迅速、有效地进行处置。
四、结论飞行区安全运行管理是机场安全保障工作的重中之重,必须引起各方的高度重视。
数学建模报告-飞行问题

是在第 88 个 5 秒时,第 5 架和第 6 架飞机会发生碰撞。 所以需要调整飞机的飞行方向角来避过这次相撞。
一时刻两架飞机之间的距离小于 8 公里,因此要调整飞行方向一定角度,保证任意两架飞机在区域
内任意时刻,两者的距离均不小于 8 公里,避免相撞。考虑到调整角度应尽量小,可以简化飞行方 向调整策略,降低调整难度,同时减轻机内乘客及工作人员的不适。此外由此初步确定了调整目 标:所有六架飞机的飞行方向调整角度均尽量小。
6
明显是从一开始就改变α角度使得 | a(i) | 更小,所以越早调整越好,即在第六架飞 i 1
机进入时即可调整角度。
如图:
A α
β B
D C
2、模型建立 由问题一,我们首先判断在第 6 架飞机进入正方形区域后会否发生飞机碰撞。 我们依照数据,用 matlab 画出大致的航线图形(程序见附录 1)。其中灰线代表 飞机向上飞行,黑线代表飞机向下飞行。(如图 1)
飞机编号
横坐标 x
纵坐标 y
1
150
140
2
85
85
3
150
155
4
145
50
5
130
150
新进入
0
0
注:方向角指飞行方向与x轴正向的夹角。
方向角(度) 243 236 220.5 159 230 52
二、问题分析
根据问题容易知道,这显然是一个优化问题,当两架飞机可能发生碰撞时,即在规定区域内某
3 / 12
三、模型假设与符号约定
空中飞行管理方案

空中飞行管理方案一、概述随着民航业的不断发展和进步,空中飞行管理成为了航空领域中不可或缺的一环。
空中飞行管理主要负责对航空器在空中的飞行轨迹、高度、速度等进行有效的管理和监控,旨在确保飞行安全和空中交通的有序性。
本文将从空中飞行管理的定义、目标、组成部分、工作流程等方面进行详细的介绍,希望能为读者提供一个全面了解空中飞行管理的概念和实践的基础。
二、空中飞行管理的定义和目标空中飞行管理是指对飞行活动进行计划、组织、指挥和控制的过程,通过有效的管理和监控手段,保障航空器在空中的安全飞行、有序运行、及时救援和准确导航。
其主要目标包括:1. 保障飞行安全。
必须确保航空器在空中的飞行活动不会出现碰撞、冲突、失控等情况,最大限度地保障飞行人员的生命安全和机上乘客的人身财产安全。
2. 保障空中交通的有序性。
通过有效的空中交通管制手段,合理规划和组织空中交通流,防止因空中交通拥堵而导致的航班延误和航空器碰撞等问题。
3. 提高空中飞行效率。
通过科学的航线规划和空中交通分配,提高航空器的飞行效率,减少飞行时间和燃料消耗,降低航空运输成本。
4. 保障航空器在恶劣气象条件下的安全运行。
对恶劣天气条件下的飞行活动进行有效监控和控制,确保航空器在恶劣气象下能够安全飞行和着陆。
5. 提供协助救援和导航服务。
在紧急情况下,通过空中交通管制系统,对处于危险状况的航空器提供及时的救援和指导。
综上所述,空中飞行管理的核心是保障飞行安全、保障空中交通的有序性、提高空中飞行效率、保障航空器在恶劣气象条件下的安全运行以及提供协助救援和导航服务。
三、空中飞行管理的组成部分空中飞行管理主要由以下几个部分组成:1. 空中交通管制系统。
它是空中飞行管理的核心部分,负责对空中飞行活动进行有效的监控、指挥和协调。
通过航空雷达、通信系统、空中交通控制中心等设施,实时监控空中飞行活动,对飞行器的飞行轨迹、高度、速度等进行控制和指挥,协调空中交通流,确保空中交通的有序性和安全性。
1995年A题飞行管理问题
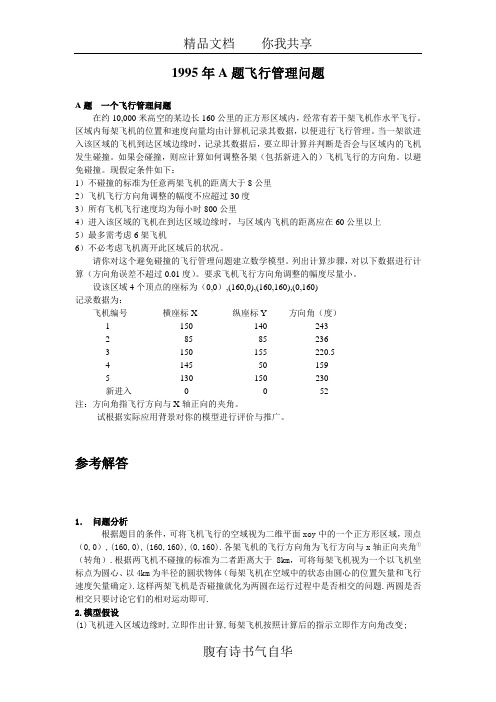
1995年A题飞行管理问题A题一个飞行管理问题在约10,000米高空的某边长160公里的正方形区域内,经常有若干架飞机作水平飞行。
区域内每架飞机的位置和速度向量均由计算机记录其数据,以便进行飞行管理。
当一架欲进入该区域的飞机到达区域边缘时,记录其数据后,要立即计算并判断是否会与区域内的飞机发生碰撞。
如果会碰撞,则应计算如何调整各架(包括新进入的)飞机飞行的方向角。
以避免碰撞。
现假定条件如下:1)不碰撞的标准为任意两架飞机的距离大于8公里2)飞机飞行方向角调整的幅度不应超过30度3)所有飞机飞行速度均为每小时800公里4)进入该区域的飞机在到达区域边缘时,与区域内飞机的距离应在60公里以上5)最多需考虑6架飞机6)不必考虑飞机离开此区域后的状况。
请你对这个避免碰撞的飞行管理问题建立数学模型。
列出计算步骤,对以下数据进行计算(方向角误差不超过0.01度)。
要求飞机飞行方向角调整的幅度尽量小。
设该区域4个顶点的座标为(0,0),(160,0),(160,160),(0,160)记录数据为:飞机编号横座标X 纵座标Y 方向角(度)1 150 140 2432 85 85 2363 150 155 220.54 145 50 1595 130 150 230新进入0 0 52注:方向角指飞行方向与X轴正向的夹角。
试根据实际应用背景对你的模型进行评价与推广。
参考解答1.问题分析根据题目的条件,可将飞机飞行的空域视为二维平面xoy中的一个正方形区域,顶点(0,0),(160,0),(160,160),(0,160).各架飞机的飞行方向角为飞行方向与x轴正向夹角①(转角).根据两飞机不碰撞的标准为二者距离大于8km,可将每架飞机视为一个以飞机坐标点为圆心、以4km为半径的圆状物体(每架飞机在空域中的状态由圆心的位置矢量和飞行速度矢量确定).这样两架飞机是否碰撞就化为两圆在运行过程中是否相交的问题.两圆是否相交只要讨论它们的相对运动即可.2.模型假设(1)飞机进入区域边缘时,立即作出计算,每架飞机按照计算后的指示立即作方向角改变;(2)每架飞机在整个过程中至多改变一次方向;(3)忽略飞机转向的影响(转弯半径和转弯时间的影响);(4)新飞机进入空域时,已在空域内部飞行的飞机的飞行方向已调合适,不会碰撞; (5)对每架飞机方向角的相同调整量的满意程度是一样的. 3.模型的建立 (1)圆状模型.由前面的分析将飞机作为圆状模型进行研究.两圆不相交,则表明不会发生碰撞事故;若两圆相交,则表明会发生碰撞事故.为了研究两飞机相撞问题,采用相对速度作为研究对象,因为飞机是否相撞的关键是相对速度,图10-3给出任意两架飞机间的关系其中符号含义如下:i,j---第i,第j 架飞机的圆心;a ij ---第i 架飞机与第j 架飞机的碰撞角,是两圆的切线交角中指向圆的那个角的一 半,a ij =a ji ;υij ---第i 架飞机相对于第j 架飞机的相对飞行速度; l ij ---第i 架飞机与第j 架飞机的圆心距;βij ---第i 架飞机对于第j 架飞机的相对速度与两架飞机圆心连线的交角.规定以第i 架 飞机为原点,i →j 连线从i 指向j 为正方向,逆时针旋转为正角,顺时针旋转为负角; AB,CD 为两圆的公切线,m i //AB,n i //CD. 另外再引入记号:θi ---第i 架飞机的飞行方向与直角坐标xoy 中x 轴正向的夹角(转角); x i ---第i 架飞机在坐标xoy 中的位置矢量; υi ---第i 架飞机的飞行速度矢量.由图10-3中的关系得到两飞机不相撞(两圆不相交)的充要条件是|βij |>a ij .当|βij |≤a ij 时,则通过调整两飞机的方向角θI , θj ,使飞机不相撞. (2)决策目标.题目要求飞机飞行方向角调整的幅度尽量小,这个尽量小是针对每架飞机而言,同时也要求整体满意程度(即对管理层而言,应使每架飞机的调整都尽量的小).因此构造目标函数时,可以认为若对方向角调整量最大的飞机而言,其调整量可满意,则由假设(5)对其余飞机调整量均可满意.即要求每架飞机的调整量都小于某个数θ(θ≥0).故可取目标函数为求其最小值min θ.(3)由圆状模型导出的方程.首先讨论相对飞行速度方向角βij 的改变量与第i,第j 两架飞机飞行方向角改变量Δθi , Δθj 的关系.由题目条件知,对第i 架飞机|υi |=800=A(km).于是可用复数表示飞机速度υi =i i A θ.设第i,j 两架飞机飞行方向改变前的速度分别为j Ae ,i Ae i 1j i 1i θθ=υ=υ,改变飞行方向后的速度为)(i 2j i i Ae θ∆+θ=υ, )(i 2j j j Aeθ∆+θ=υ则飞行方向改变前后的相对速度分别为)e (A)(i 1j 1i 1ij i i θ∆-θ=υ-υ=υ)e e (A )(i )(i 2j 2i 2ij j j i i θ∆+θθ∆+θ-=υ-υ=υ)e(A )ee (A )(i )(i )(i 1ij2iji i j j i i θ∆-θθ∆+θθ∆+θ-=υυ=jj j i j j j j i i i i sin i cos sin i cos )sin()cos()sin()cos(θ-θ-θ+θθ∆+θ-θ∆+θ-θ∆+θ+θ∆+θ=)2cosi 2(sin2sin)2cos i 2(sin 2sin2ji ji ji jj i i j j i i jj i i θ+θ-θ+θθ-θθ∆+θ+θ∆+θ-θ∆+θ+θ∆+θθ∆-θ-θ∆+θ=2sin 2sinji jj i i θ-θθ∆-θ-θ∆+θ 2j j 2jj i i iie e θ+θθ∆+θ+θ∆+θ=2sin2sinji jj i i θ-θθ∆-θ-θ∆+θ 2ji ie θ∆+θ∆即2ij υ与1ij υ交角相之差为2ji θ∆+θ∆.将其归纳为定理 对第i,j 架飞机,其相对速度方向βij 的改变量Δβij等于两飞机飞行方向角改变量之和的一半2ji θ∆+θ∆. 由题目的要求调整飞行方向角时不能超过30°即|Δθi |≤30 , i=1,2,…,6要保证调整飞行方向后飞机不碰撞,应有 |βij +Δβij |>a ij由前面构造的目标函数为 min θ 0≤θ≤30总结以上得如下优化模型min θ (1)s.t. |βij +Δβij |>a ij , 2ji ij β∆+β∆=β∆ (2)|Δθi |≤θ, I=1,…,6 (3) |Δθi |≤30, I=1,…,6 (4) 0≤θ≤30 (5) (4)线性规划模型.将上述优化模型进行化简,可转化为线性规划模型. 当βij >0时,(10.2)式可化为βij +Δβij >a ij ; 当βij <0时,(10.2)式可化为βij +Δβij >-a ij ;由于Δθi 可正负,为使各变量均为正,引入新的变量1i θ∆,2i θ∆使Δθi=1i θ∆-2i θ∆ , 0≤1i θ∆≤30 , 0≤2i θ∆≤30于是条件(3),( 4)可化为 1i θ∆-2i θ∆≤30 1i θ∆-2i θ∆≥-30 1i θ∆-2i θ∆≤θ1i θ∆-2i θ∆≥-θ这样,优化模型(1)~(5)就转化为如下线性规划模型min θ (6) s.t.βij >0时, 1i θ∆-2i θ∆+1j θ∆-2j θ∆>2αij -2βij , (7) βij <0时, 1i θ∆-2i θ∆+1j θ∆-2j θ∆<-2αij -2βij(8)1i θ∆-2i θ∆≤30 (9) 1i θ∆-2i θ∆≥-30 (10) 1i θ∆-2i θ∆≤θ (11) 1i θ∆-2i θ∆≥-θ (12) 1i θ∆ , 2i θ∆ , θ, ≥0 (14)其中βij ,αij 可由题中已知的参数计算得到, βij =arg(υi -υj )-arg(γj -x i ) αij =arcsin(8/|x i -x j |)4.模型求解(1)记录各飞机状态(位置矢量、速度矢量); (2)计算任两架飞机间的参数βij , αij ;(3)利用计算线性规划的软件(如LINDO)求解(10.6)~(10.14).这一 步也可使用单纯形法自己编程求解. 5.结果检验对题目所给实例进行计算得如下调整方案Δθ1=0 , Δθ2=0, Δθ3=1.814732, Δθ4=-0.743155, Δθ5=0, Δθ6=1.814732.各飞行方向角按此方案调整后,系统各架飞机均满足|βij |>αij (即不会相撞).其中有些飞机对有|βij |-αij <0.01(0.01°是题目要求的计算精度).如果希望|βij |≥αij +0.01,只须将模型中的αij用ij α=αij +0.01代替即可.将调整后各量再代入模型进行计算得 min θ=0即此时无需再改动.经模拟程序运行可观察动态结果是正确的. 6.模型评价与推广(1)此模型采用圆状模型分析碰撞问题是合理的,同时采用相对速度作为判断标准,即体现了碰撞的本质(相对运动),又简化了模型的计算;(2)建模中用了适当的简化,将一个复杂的非线性规划问题简化为线性规划问题.既求到合理的解,又提高了运算速度.这对于解决高速运行的飞机碰撞问题是十分重要的.此模型对题目所提供的例子计算得出的结果是令人满意的.(3)简化模型中忽略了βij =0(即两架飞机迎面飞行)的情况. βij =0时,可使用约束条件(10.7)式或(10.8)式求出最优解.比较此两组解可得最优解.(4)由对称性知模型中的约束条件个数是2n C (n 是飞机数),所以约束条件数为2nC +4n=n 27n ,n 增大时,约束条件数是n 的二次函数,计算量增加不大. 出师表两汉:诸葛亮先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
飞行管理问题数学模型

飞行管理问题以各飞机调整的飞行角度平方和作为目标函数,而以每两架飞机之间的最小距离不超过8公里,各飞机飞行角度调整的值不超过30o ,为约束条件。
如此得出的是一个非线性模型。
以t 表示时间;i x 与i y 分别表示第i 架飞机的横纵坐标(问题中已经给出);i θ表示第i 架飞机的飞行方向角(问题中已经给出);)(t d ij 表示t 时刻第i 架飞机与第j 架飞机间的距离;v 表示飞机的飞行速度(v = 800)。
则目标函数为:∑=∆=612i if θ。
)(2t d ij = 2))cos()(cos((j j i i j i vt x x θθθθ∆+-∆++-2))sin()(sin((j j i i j i vt y y θθθθ∆+-∆++-+, 则约束条件为:=ˆij D j i j i t d ij t ≠=>≥,6,,1,,64)(min 2。
⇒=02dtdd ij =t -a b ,其中a x x y y i j i i j j i j i i j j =-+-++-+-+()(cos()cos())()(sin()sin())θθθθθθθθ∆∆∆∆,b v i i j j i i j j =+-+++-+[(cos()cos())(sin()sin())]θθθθθθθθ∆∆∆∆22。
将t 代入即可求出ij D 。
于是本问题的一个数学模型为: ⎪⎪⎪⎩⎪⎪⎪⎨⎧≠=≤∆>∆=∑=ji j i D t s f i ij i i,6,,1,6||64..min 612πθθ,引入记号:T),,(61θθθ∆∆=∆ ,Tg g g ),,(151 =(g 是由64-ij D 按j i j i ≠=,6,,1, 构成的向量,在下面的程序中计算),则模型为:⎪⎩⎪⎨⎧≤≤<=vub vlb g t s f θθθ0..'min (10.1)其中TTvub vlb )1,1,1,1,1,1(6,)1,1,1,1,1,1(6ππ=-=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多架飞机同层飞行安全分析摘要随着经济的发展和航空航天技术的进步,航空飞行出行在居民出行方式所占的比重也越来越大。
因此,航空安全问题也越来越受到人们的关注,解决航空安全问题月发迫切。
本文主要讨论飞机同一水平层安全飞行,避免碰撞的问题,通过运用非线性规划模型,对不同角度飞行对飞机安全的影响进行了分析与评价。
问题一中采用非线性规划程序对6架飞机中两两进行分析,根据所给的数据计算,结果发现第6架飞机和第3架、第5架飞机会发生碰撞,碰撞是在第6架飞机进入飞行区域后,在飞行区域边缘并不会发生碰撞。
问题二中将t等分成若干小段,利用动态规划,使得在每小段时间上都满足距离大于8公里,这样使得在飞行区域内基本满足距离值大于8公里。
关键词:航空安全、非线性规划,动态规划一、问题提出在约10000米的高空某边长为160公里的正方形区域内,经常有若干架飞机作水平飞行。
区域内每架飞机的位置和速度向量均由计算机记录其数据,以便进行飞行管理。
当一驾欲进入该区域的飞机到达区域边缘时,记录其数据后,要立即计算并判断是否会与区域内的飞机发生碰撞。
如果会碰撞,则应计算如何调整各架(包括新进入的)飞机飞行的方向角,以避免碰撞。
根据题目,提出以下问题:1.判断新进入区域的飞机是否会与此区域的飞机发生碰撞;2.怎样调整角度以避免碰撞且使角度最小;3.模型评价与推广。
二、基本假设1、假设1:不碰撞的标准为任意两架飞机的距离大于8公里;2、假设2:飞机飞行方向角调整的幅度不应超过30度;3、假设3:所有飞机飞行速度均为每小时800公里;4、假设4:进入该区域的飞机在到达区域边缘时,与区域内飞机的距离应在60公里以上;5、假设5:最多需考虑6架飞机;6、假设6:不必考虑飞机离开此区域后的状况.三、符号说明四、问题分析飞机飞行角度对飞机行驶安全起着至关重要的作用,而且飞机在空中飞行的路线一般都是确定的,且不能碰到任何障碍物,在空中飞行时调整角度可以适当改变航向,但不能过度调解。
所以当多架飞机同时在同一水平层,为避免碰撞,有时需要调解角度来确保安全飞行。
问题一的分析问题一中要求计算当新飞机进入飞行区域是时,是否会与该区域内的飞机发生碰撞,运用非线性规划模型对所给的数据进行分析,并通过计算得出结果。
五、模型的建立与求解5.1 问题一模型建立与求解5.1.1 问题一的分析问题1主要判断当6号飞机进入该区域后,判断是否会有飞机发生碰撞。
碰撞发生的条件为两飞机的距离小于8公里。
5.1.2 问题一模型的建立当飞机进入场地后,首先建立起坐标系。
其中每架飞机共存在3个变量(xi,yi,a)。
利用两点间距离公式可以得到任意两架飞机之间距离的平方S=(xi-xj)^2+(yi-yj)^2。
针对第一问,利用线性规划模型求出S的最小值,比较Smin与64的大小,大于64则说明两架飞机之间距离大于8公里,即不会发生碰撞,否则会发生碰撞。
5.1.3 问题一模型的求解首先,因为进入该区域飞机到达边缘处要与其他飞机距离在60公里以上,利用matlab 判断当x6=0和x6=160时,S是否大于3600,大于时,则满足与其他飞机距离在60公里以上,可以发现,满足条件。
之后利用线性规划求解Smin,目标函数为S=(xi-xj)ˆ2-(yi-yj)ˆ2约束条件为 0<xi<1600<yi<160 0<xj<160 0<yj<160其中i,j为飞机序号。
求出的Smin为:比较Smin与64大小,可以得出S(3,6),S(5,6)小于64,即第三架飞机与第六架飞机,第五架飞机与第六架飞机会发生碰撞。
5.2 问题二模型建立与求解5.2.1 问题二的分析第二问中存在两组变量,t和Δa,因此问题不太好解决,我们可以试着消去一个变量,利用将t等分成足够多的小分,使得在每一小分上均满足S>64,则此时只存在变量Δu,则利用非线性规划可以解决问题。
5.2.2 问题二模型的建立当飞机进入场地后,首先建立坐标系。
可以证明出早调整优于晚调整,一次调整优于多次调整,我们在飞机的初始时调整角度来达到彼此不相撞的目的。
将问题2中,求出max{t1…t6},并将最大的飞出时间等分成100小份,将问题转化成动态规划问题中的离散规划问题,根据6架飞机在每一小时间段内均大于8公里。
则可以近似得出两架飞机之间距离大于8公里。
然后由每一段时间内距离大于八公里,得出S>64,并由此不等式可以建立起约束条件,求出min=∑|Δa|5.2.3 问题二模型的求解利用MATLAB将初始角度值转化为弧度制,利用约束方程[(x(i)-x(j))+v*t(d)*(cos(a(i))-cos(a(j))))^2+((y(i)-y(j))+v*t(d)*(sin(a(i)) -sin(a(j))))^2-64>0来求出目标函数min=∑|Δa|的最小值,可以求出Δa1=0,Δa2=0,Δa3=0.4932994,Δa4=0,Δa5=0,Δa6=0.1328732;转化为角度制,即Δa3= 2.8264度,Δa6=0.7613度。
即其他飞机不调整,3号飞机调整2.8264度,6号飞机调整0.7613度。
5.2.4 问题二结果的分析及验证优点:问题2中,将连续的时间t转化为离散的时间点t之后,可以消去一个未知量t,使得模型建立较为容易,约束方程容易列出。
不足:将连续时间转化为时间点之后,不能严格证明在每一时间点上均大于8公里,且计算出来的角度存在一定的误差。
Lingo程序运行时间过长,分成100份后,运行需要16分钟,难以做到进一步精确。
六、模型的评价与推广7.1 模型的评价优点:对于第一问,我们从两两分析模拟飞行的角度得出飞机飞行的结果,比较直观对于第二问,我们利用非线性规划的原理,将时间t转换为离散变量,然后将t分为100份,要求每一份都满足s>64,然后得出最优结果。
不足:将连续时间转化为时间点之后,不能严格证明在每一时间点上均大于8公里,且计算出来的角度存在一定的误差。
Lingo程序运行时间过长,分成100份后,运行需要16分钟,难以做到进一步精确。
并且一开始程序过于繁琐,耗费时间,理论模型的建立也不太合适,需要我们进一步努力完善7.2 模型的推广本模型虽然存在一些不足之处,但是得到的结还是较为合理的,本模型还可以用于优化人员配置,资源安排分配等领域,在大体上要考虑全面,相信更加令人满意。
七、参考文献[1] 姜启源等, 《数学模型》(第三版),高等教育出版社,2003年8月[2] 肖华勇等,《大学生数学建模》(第一版)八、附录8.1 附录清单附录1:求解问题一的LINGO程序附录2:求解问题二的Mathematica程序附录3:求解问题一的中间数据附录4:问题二的完整数据结果8.2 附录正文附录1:求解问题一的LINGO程序附录2:求解问题一的中间数据附录3:求解问题二的LINGO程序附录4:问题二的中间数据求解问题一的LINGO程序min=(150+800*t*@cos(4.2412)-85-800*t*@cos(4.1190))^2+(40+800*t*@sin(4.2412) -85-800*t*@sin(4.1190))^2;0<150+800*t*@cos(4.2412/180);150+800*t*@cos(4.2412/180)<160;0<40+800*t*@sin(4.2412/180);40+800*t*@sin(4.2412/180)<160;0<85+800*t*@cos(4.1190);85+800*t*@cos(4.1190)<160;0<85+800*t*@sin(4.1190);85+800*t*@sin(4.1190)<160;通过改变角度值,可以分别求出两两飞机之间的距离:附录2:求解问题一的中间数据附录1:求解问题二的LINGO程序model:title 飞行管理问题 ;sets:plane/1..6/:x,y,a,a0,d_a;!x:初始横坐标,y:初始纵坐标,a:初始角度,a0:调整后角度 d_a:调整角度link(plane,plane)|&1 #lt# &2;time/1..100/:t;endsetsdata:x=150,85,150,145,130,0;y=40,85,155,50,150,0;a0=4.2412,4.1190,3.8485,2.7751,4.0143,0.9076;v=800;enddatamin=@sum(plane(i):@abs(d_a(i)));@for(time(d):t(d)=0.283/100*d);@for(plane(i):a(i)=a0(i)+d_a(i));@for(time(d):@for(link(i,j):((x(i)-x(j))+v*t(d)*(@cos(a(i))-@cos(a(j))))^2+((y(i)-y(j))+v*t(d)*(@sin(a(i))-@sin(a(j))))^2-64>0););@for(plane:@bnd(-0.5236,d_a,0.5236));end附录4:问题二的中间数据0.4932994 :d_a(3)改变量的弧度制值0.1328732 :d_a(6)改变量的弧度制值4.2412 ,4.1190 ,3.8485 ,2.7751 ,4.0143,0.9076:各飞机初始飞行角度的弧度制值。