设计利用区域生长算法进行图像分割的程序
基于区域生长法的图像分割论文原稿
基于区域增长法的图像分割王春者(信工学院电子信息工程专业)摘要图像分割是一种重要的图像分析技术。
对图像分割的研究一直是图像技术研究中的热点和焦点。
图像分割的目的是将图像划分为不同的区域,基于区域生长是以直接找寻区域为基础的分割技术。
本论文首先简单介绍图像分割的主要方法,然后重点介绍一种基于区域增长法的图像分割方法,该方法是根据同一物体区域内象素的相似性质来聚集象素点的方法,从初始区域(如小邻域或甚至于每个象素)开始,将相邻的具有同样性质的象素或其它区域归并到目前的区域中从而逐步增长区域,直至没有可以归并的点或其它小区域为止。
区域内象素的相似性度量可以包括平均灰度值、纹理、颜色等信息。
关键词:图像分割;区域增长法;基本算法AbstractThe image segmentation is an important technology of image processing. It is still a hot point and focus of image processing.The purpose is to image segmentation image is divided into different areas,based on region growing segmentation technique is based on the direct search for regional.This paper first briefly introduce the main method of image segmentation, and then focuses on a method of image segmentation based on region growing method, the method is based on similar properties in the same region within the object pixel to pixel aggregation method, from the initial area (as regards neighborhood of each pixel, or even), the adjacent pixel having the same nature or other areas merge into the current so as to gradually increase the area of the region can merge up until no other point or small area. Similarity measure may include a region of the pixel values of the average gray, texture, color and other information.Key words:Image segmentation; region growing method; basic algorithm目录第一章绪论 (1)1.1图像分割技术的现状和发展情况 (1)1.2 图像分割的简介 (1)1.3 图像分割的定义 (2)1.4 图像分割主要研究方法 (3)1.4.1 边缘检测法 (3)1.4.2 区域提取法 (3)1.4.3 阈值分割法 (4)1.4.4 结合特定理论工具的分割法 (4)1.5 论文的内容与结构安排 (5)第二章图像分割预处理 (6)2.1 图像平滑 (6)2.1.1 中值滤波原理 (6)2.1.2 平滑效果分析 (7)2.2灰度调整 (8)2.2.1 灰度调整原理 (8)2.2.2 灰度调整效果分析 (8)2.3本章小结 (9)第三章基于区域增长法的图像分割技术 (10)3.1区域生长法原理 (10)3.2 图像生长法实验方法 (11)3.2.1 图像二值化 (12)3.2.2基于区域灰度差的生长准则 (13)3.2.3 基于区域内灰度分布统计性质的生长准则 (14)3.3 算法流程设计 (14)3.4 本章小结 (16)第四章总结与展望 (17)4.1 工作总结 (17)4.2 工作展望 (17)致谢 (19)参考文献 (20)附录 (21)第一章绪论本章对论文涉及的研究领域进行了较为详细的综述。
Matlab程序遗传算法大津法区域生长法迭代法分割图像
Matlab程序:遗传算法/大津法/区域生长法/迭代法分割图像区域生长的图像分割程序image=imread('mri1.bmp');I=rgb2gray(image);figure,imshow(I),title('原始图像')I=double(I);[M,N]=size(I);[y,x]=getpts; %获得区域生长起始点x1=round(x); %横坐标取整y1=round(y); %纵坐标取整seed=I(x1,y1); %将生长起始点灰度值存入seed中Y=zeros(M,N); %作一个全零与原图像等大的图像矩阵Y,作为输出图像矩阵Y(x1,y1)=1; %将Y中与所取点相对应位置的点设置为白场sum=seed; %储存符合区域生长条件的点的灰度值的和suit=1; %储存符合区域生长条件的点的个数count=1; %记录每次判断一点周围八点符合条件的新点的数目threshold=15; %域值while count>0s=0; %记录判断一点周围八点时,符合条件的新点的灰度值之和count=0;for i=1:Mfor j=1:Nif Y(i,j)==1if (i-1)>0 && (i+1)<(M+1) && (j-1)>0 && (j+1)<(N+1) %判断此点是否为图像边界上的点for u= -1:1 %判断点周围八点是否符合域值条件for v= -1:1 %u,v为偏移量if Y(i+u,j+v)==0 & abs(I(i+u,j+v)-seed)<=threshold& 1/(1+1/15*abs(I(i+u,j+v)-seed))>0.8%判断是否未存在于输出矩阵Y,并且为符合域值条件的点Y(i+u,j+v)=1; %符合以上两条件即将其在Y中与之位置对应的点设置为白场count=count+1;s=s+I(i+u,j+v); %此点的灰度之加入s中endendendendendendendsuit=suit+count; %将n 加入符合点数计数器中sum=sum+s; %将s加入符合点的灰度值总合中seed=sum/suit; %计算新的灰度平均值endfigure,imshow(Y),title('分割后图像')。
基于区域生长的图像分割方法--南邮--车少帅
S值小则可以连接。
w1 , w2 , w3
为非负的权值
(2)依赖边缘确定两象素是否可以连接。
3. 登山算法
(1)灰度极大值 点作为中心点; (2)16个等角度 间隔方向上检测 斜率值最大的点 作为边缘点; (3)以16个边缘 点作为种子点进 行区域生长。
相邻像素表示:
图像中各个区域分割,都是从其种子点开始,在各个方向上 生长得到的。 区域生长分割示意图:
区域生长法关键:
(1)确定每个将相邻像素包括进来的相似性判别准 则(生长准则)。 (3)确定区域生长过程停止的条件或规则。 相似性准则可以用灰度级、彩色值、结构、梯度或其它特 征来表示。
举例:一幅图像背景部分的均值为25,方
差为625,在背景上分布着一些互不重叠的 均值为150,方差为400的小目标。设所有 目标合起来约占图像总面积的20%,提出1 个基于区域生长的分割算法将这些目标分 割出来。
算法描述
①从左至右,从上至下扫描图像。 ②若扫描到灰度值大于150的象素,取为种 子点,进行区域生长。 生长准则为将相邻的灰度值与已有区域的 平均灰度值的差小于60(3σ )的象素扩展 进来。 ③若不能再生长,标记已生长区域。 ④若扫描到图像右下角,结束;否则回到 ①继续。
一个区域生长的示例
给出已知矩阵A:
大写的5 为种子, 从种子开始向周围每个象素的值与种子值 取灰度差的绝对值, 当绝对值少于某个门限T 时, 该象素便 生长成为新的种子, 而且向周围每个象素进行生长; 如果取门限T=1, 则区域生长的结果为:
可见种子周围的灰度值为4、5、6 的象素都被很好地包进 了生长区域之中, 而到了边界处灰度值为0、1、2、7 的象 素都成为了边界, 右上角的5 虽然也可以成为种子, 但由于 它周围的象素不含有一个种子, 因此它也位于生长区域之 外; 现在取门限T=3, 新的区域生长结果为:
基于区域的分割原理设计
基于区域的分割原理设计
基于区域的分割原理是一种将图像分割为不同的区域的图像处理方法。
其主要原理是根据图像中不同区域的颜色、纹理、边缘等特征的差异来进行图像分割。
基于区域的分割原理的设计步骤如下:
1. 预处理:对图像进行一些预处理操作,如图像灰度化、平滑、边缘检测等,以提取图像特征。
2. 区域生长:选取一个种子点作为区域的起始点,然后使用一定的准则将邻域像素逐步添加到该区域中,直到满足停止准则为止。
区域生长的标准可以是像素灰度值的相似度、颜色相似度等。
3. 区域分裂与合并:将图像根据一定的准则进行区域的分裂与合并操作。
分裂操作将具有相近特征的区域进行划分,而合并操作将相似的区域进行合并,以减少生成的区域数量。
4. 全局优化:对分割结果进行全局优化,以获得更准确的分割结果。
常用的全局优化方法有迭代最优化算法、图割算法等。
5. 后处理:对分割结果进行一些后处理操作,如去除小区域、填充空洞等。
基于区域的分割原理可以应用于许多领域,如医学图像分割、目标检测与跟踪、场景分析等。
该方法能够有效地将图像分割为不同的区域,为后续的图像分析和处理提供了便利。
区域生长算法
区域生长算法
区域生长算法是一种基于像素邻域信息的图像分割算法,其主要
思想是从一些像素点的种子点出发,逐渐地将与其相邻的像素点合并
成一个区域,在合并过程中保持一定的相似性和连通性。
这种算法在
图像分割领域中有着广泛的应用,例如医学图像分析、自然图像分割
和计算机视觉等。
区域生长算法的实现过程包括以下几个步骤:首先设置像素种子点,然后从这些种子点出发进行区域生长。
在生长的过程中,使用一
定的相似性准则来判断当前像素是否属于当前区域,这些准则包括灰
度相似度、颜色相似度、纹理相似度等。
如果当前像素属于当前区域,那么将其合并到当前区域;如果不属于当前区域,则继续向周围的像
素进行探索。
直到所有与种子像素相邻的像素都被合并到当前区域中
为止,这个区域的生长过程就结束了,同时,这个区域成为了一个独
立的像素集合。
区域生长算法的优势在于其快速、准确和可靠等特点,能够对图
像中的目标进行精确的分割和识别。
尽管这种算法存在一些缺陷,例
如对于噪声和纹理差异较大的图像存在一定的局限性,但是区域生长
算法已经成为了目前图像分割领域中最具潜力的算法之一,并且得到
了广泛的研究和应用。
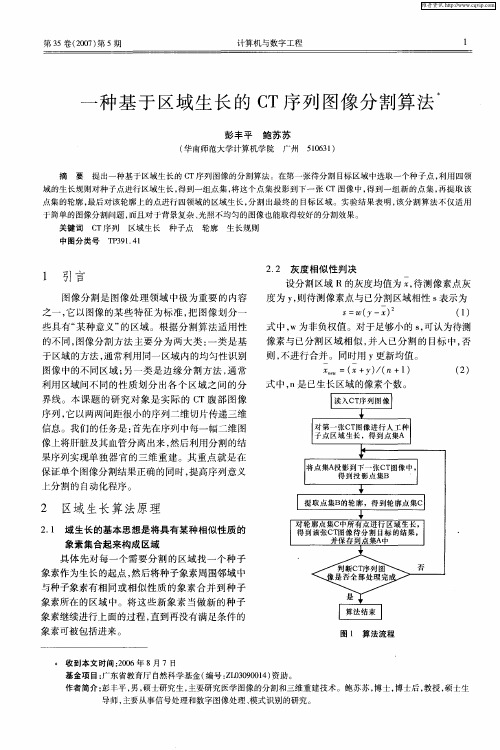
一种基于区域生长的CT序列图像分割算法
第3 5卷(0 7 第 5期 20 )
计算机 与数字 工程
一
种 基 于 区域 生 长 的 C T序 列 图像 分 割算 法
彭 丰平 鲍苏苏
广州 50 3 ) 16 1 ( 华南师范大学计算机学院
摘 要
提出一种基于 区域生长 的 C T序列图像 的分割算 法。在第一 张待分割 目标 区域 中选取一个种子点 , 利用 四领
则 , 进行合 并 。同时用 y更新 均值 。 不
=
…
( Y / 凡+1 + ) ( )
() 2
式 中 , 已生 长区域 的像 素个数 。 n是
读 入c 序 列图像 T
信息。我们的任务是 : 首先在序列中每一幅二维 图
像上将 肝脏及 其血 管分 离 出来 , 然后 利用 分割 的结 果 序列 实现单 独 器 官 的三 维 重建 。其 重点 就 是 在 保 证单个 图像 分割结 果正 确 的同时 , 高序 列意义 提
中 图分 类 号 T 3 14 P9.l
1 引言
图像分 割 是 图像 处理 领 域 中极 为 重要 的 内容 之 一 , 以 图像 的 某些 特 征 为 标 准 , 图像 划 分一 它 把 些 具有 “ 种意 义 ” 区域 。根 据分 割算 法 适 用性 某 的 的不 同 , 图像分 割 方法 主 要 分 为两 大类 : 类 是基 一 于 区域 的方法 , 常利用 同一 区域 内的均匀性 识别 通 图像 中 的不 同 区域 ; 一类 是 边 缘 分 割方 法 , 常 另 通 利用 区域 问不 同的性 质 划 分 出各 个 区 域 之 间 的分 界 线 。本课 题 的研 究 对 象是 实 际 的 C T腹 部 图像 序列 , 以两两 间距 很小 的序列 二维 切 片传递 三维 它
python opencv区域生长算法
python opencv区域生长算法(最新版)目录一、引言二、Python 与 OpenCV 简介三、区域生长算法的原理与应用四、Python 与 OpenCV 实现区域生长算法的步骤五、总结正文一、引言在计算机视觉领域,图像分割是重要的研究内容之一。
区域生长算法作为一种常用的图像分割方法,广泛应用于目标检测、图像识别等领域。
本文将介绍如何使用 Python 与 OpenCV 实现区域生长算法。
二、Python 与 OpenCV 简介Python 是一种广泛应用于数据分析、科学计算和人工智能等领域的编程语言。
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉方面的算法。
Python 与 OpenCV 的结合,使得在进行图像处理和计算机视觉相关任务时更加高效便捷。
三、区域生长算法的原理与应用区域生长算法是一种串行区域分割的图像分割方法。
其基本思想是将具有相似性质的像素集合起来构成区域。
区域生长的好坏决定于三个因素:初始点(种子点)的选取、生长准则和终止条件。
区域生长算法可以从某个像素点出发,按照一定的准则逐步加入邻近像素,当满足一定条件时,区域生长终止。
这种算法常用于目标提取和图像分割等任务。
四、Python 与 OpenCV 实现区域生长算法的步骤1.导入所需库:首先,需要导入 Python 的 OpenCV 库。
2.读取图像:使用 OpenCV 的 imread 函数读取原始图像。
3.转换为灰度图像:为了方便进行区域生长,需要将图像转换为灰度图像。
可以使用 OpenCV 的 cvtColor 函数完成这个任务。
4.应用阈值处理:为了更好地进行区域生长,可以对灰度图像进行阈值处理,将其转换为二值图像。
可以使用 OpenCV 的 threshold 函数完成这个任务。
5.创建种子点:在二值图像的基础上,需要创建种子点。
区域生长的图像分割技术
基于区域生长的图像分割摘要图像分割是一种图像处理方面的重要技术, 在众多领域中有着广泛的应用,更是图像处理的基础。
本文展示了图像分割的定义、算法, 简明概要地阐述了区域生长的原理以及选取原则。
为了在C++平台上用区域生长的方法实现图像的分割,本文介绍了位图的输入和处理,并在图像被灰度化处理的前提下使用区域生长的方法实现了初步的图像分割,并且基于此编写了简单的程序进行区域生长实验。
关键字:区域生长,图像分割,生长准则,位图处理,灰度AbstractImage segmentation is an important technique for image processing, in many fields has been widely used, it is the basis of image processing. This article presents the definition of image segmentation algorithm, concise summary of the principles expounded the principle of regional growth and selected. For the C + + platform with a region growing method for image segmentation, the paper describes the input and processing of bitmap and use of regional growth in the image under is the premise of gray-processing methods to achieve the initial image segmentation, and based on this simple program written forregional growth experiments.Keywords: Regional Growth,Image segmentation,Growth Standards,Processing bitmap,Gray scale processing目录目录 (1)第1章绪论 (2)1.1研究的背景和意义 (2)1.2国内外研究现状 (2)1.3工作内容与本文结构 (3)1.3.1工作内容 (6)1.3.2本文结构 (6)第2章图像分割及分割中的基于区域生长的方法介绍 (7)2.1图像分割的定义及方法 (7)2.2.1 图像分割的定义 (7)2.2.2 图像分割的实现方法的分类 (7)2.2基于区域生长的方法 (8)2.2.1 区域生长的方法的原理 (9)2.2.2 区域生长的生长(相似)判定准则 (9)2.3本章小结 (11)第3章位图基础 (12)3.1数字图像 (12)3.1.1 图形与图像 (9)3.1.2 图像中颜色的组成 (9)3.1.3 单色图像与多色图像 (9)3.2与设备无关位图(DIB) (13)3.3本章小结 (19)第4章C++平台下区域生长方法的具体实现 (20)4.1实现流程图 (20)4.2灰度化处理...................................................... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计利用区域生长算法进行图像分割的程序
1、目的:把一幅图像划分成满足某种判据的一些区域,在这里形成一个二值图。
2、原理:首先确定每个区域中的某个已知点,加上与已知点相似的邻近点形成一个区域,在这里利用区域的均值。
当邻近点与区域均值的差值的绝对值小于阈值T 时,即满足生长条件。
方法是从种子点开始,在8连通方向上生长区域,当其邻近点满足生长条件,则就并入小快区域,当新的点被合并后再用新的区域重复这一过程,直到没有可接受的邻近点时该区域生成过程终止。
3、设计思路:
1)通过具体观察某幅图像的直方图,估计其确定种子点范围[S1,S2],并确定其阈值T;
2)透过对整幅图像的扫描,找出某个区域的一个种子点:(.)f x y
3)开始利用8连通方向,以该种子点为中心进行生成区域;[(),()]s r s θ
|(,)(.)|diff f i j f x y T =-<(,)ave f i j =
4)继续用8连通方向,以该区域为中心,把邻近满足生长条件的点并入,生成新的区域; 1(,)k
ave f i j k =∑ |(,)|diff f i j ave T ''=-<
5)重复4)步,直到不再存在邻近满足生长条件的点为止,该区域生成过程结束;
6)继续对图像进行扫描,寻找其他区域的一个种子点,按3)~5)的步骤进行
4、程序设计
根据下面的流程图可分为
区域生长算法实现流程图
5、程序
%district.m主函数
clear
clc
I = imread('bacteria.tif');
subplot(1,2,1)
imshow(I)
title('初始图像');
subplot(1,2,2)
imhist(I)
title('初始图像的直方图');
%透过该直方图确定种子满足S1~S2 的值(灰度值)和判定的依据阈值T
S1=8;S2=70;T=33;
f=double(I);
[m,n]=size(I);
shed1=zeros(3,round(m*n/2)); %存储区域生长方向上的点和该区域的均值的绝对差值和
该%点的坐标
sp1=0; % sp1 相当于指针,指向shed1 中的最后放入的值和坐标
shed2=zeros(2,m); %存储符合生长条件的点的坐标
sp2=0; % sp2 指针,指向shed2 中的最后放入点的坐标
Cut=zeros(size(f)); % Cut 为区域生长后的新图像
Cut=Cut+255; % Cut 矩阵初始值设为255
vb=0; %标记值,当vb=1 时,即要求重新计算已有的栈shed1(1,:) 的大小
for i=1:m
for j=1:n
if (f(i,j)>S1&f(i,j)<S2&Cut(i,j)~=0) %确定该点满足作为种子的条件,且未并入
已% 有生长区域
Cut(i,j)=0; % 0 时,标记该点在原图像的对应点已并入生长区域
ave=f(i,j); %确定新区域的均值的起始值
k=1; %设置生成的区域的象素个数
[Cut,shed1,sp1,vb]=ruzhan(f,Cut,shed1,sp1,ave,i,j,m,n,vb); %把周围的8 个点
入%栈
[shed1,sp1]=arrange(shed1,sp1); %对栈shed1 的数据进行由大到小的排序
[shed1,sp1,shed2,sp2]=listed(shed1,sp1,T,shed2,sp2); %% 确定符合条件的
生%%长点,将它从shed1 中取出,并放入shed2 中end
% 根据生长点开始用8 连通方式进行生长
while (sp2~=0) %当sp2=0 时表示找不到符合的点,
if (sp2~=0) %当有新的值加入区域时,求新的平均值
sum=ave*k;
for t=1:sp2
x=shed2(1,t); y=shed2(2,t);
sum=sum+f(x,y);
k=k+1;
end
ave=sum/k;
end
for t=1:sp2 %合并栈shed2 中的点,生成新的区域
x=shed2(1,t); y=shed2(2,t);
Cut(x,y)=0;
[Cut,shed1,sp1,vb]=ruzhan(f,Cut,shed1,sp1,ave,x,y,m,n,vb);
end
sp2=0;
[shed1,sp1]=arrange(shed1,sp1);
[shed1,sp1,shed2,sp2]=listed(shed1,sp1,T,shed2,sp2);
end
% 在一片区域生成之后,对栈shed1(1,:)中未并入区域的值进行处理
if (sp1~=0)
for t=1:sp1
x=shed1(2,t); y=shed1(3,t);
Cut(x,y)=255;
end
sp1=0;
shed1=zeros(3,round(m*n/2));
end
end
end
II=uint8(Cut);
figure;
imshow(II);
title('区域生长后的图像(黑色部分)');
%-------------------------------------------------------------
function [shed1,sp1,shed2,sp2]=listed(shed11,sp11,T,shed21,sp21)
% 确定符合条件的生长点,将它从shed1 中取出,并放入shed2 中
shed1=shed11;
sp1=sp11;
shed2=shed21;
sp2=sp21;
while ((sp1~=0)&(shed1(1,sp1)<=T)) %确定shed1 不为空,且存在符合生长条件的点sp2=sp2+1;
shed2(1,sp2)=shed1(2,sp1); shed2(2,sp2)=shed1(3,sp1);
sp1=sp1-1;
end
%-----------------------------------------------------------------
function [shed1,sp1]=arrange(shed11,sp11)
% 排序
shed1=shed11;
sp1=sp11;
% 根据shed1(1,:)的大小,重新排列shed1,按由大到小的顺序
for i=1:sp1-1
maxvalue=shed1(1,i);
x=shed1(2,i);
y=shed1(3,i);
for j=i+1:sp1
if maxvalue<shed1(1,j) % 满足条件则交换两列的信息
shed1(1,i)=shed1(1,j); shed1(2,i)=shed1(2,j); shed1(3,i)=shed1(3,j);
shed1(1,j)=maxvalue; shed1(2,j)=x; shed1(3,j)=y;
maxvalue=shed1(1,i); x=shed1(2,i); y=shed1(3,i);
end
end
end
%-----------------------------------------------------------------------
function [Cut,shed1,sp1,vb]=ruzhan(f,Cut1,shed11,sp11,ave,i,j,m,n,vb1)
% 入栈
Cut=Cut1;
shed1=shed11;
sp1=sp11;
vb=vb1;
if (vb==1) %重新计算已有的栈shed1(1,:) 的大小
for t=1:sp1
shed1(1,t)=abs(f(shed1(2,t),shed1(3,t))-ave);
end
vb=0;
end
%把新的生长方向上的点存入矩阵zb
for x=i-1:i+1
for y=j-1:j+1
if (x>0&x<=m&y>0&y<=n&Cut(x,y)==255) % 排除已经的生长区域上的点,或
者%已入栈的点,以及防止出界diff=abs(f(x,y)-ave); %该点灰度值和均值的绝对差值
%插入shed1 栈中
sp1=sp1+1; %指向新的入栈点
shed1(1,sp1)=diff;
shed1(2,sp1)=x;
shed1(3,sp1)=y;
Cut(x,y)=125; %标记已入栈的点
end
end
end
6、结果
7、结论
1)基本实现了区域分割的目的;
2)若是种子灰度值和阈值设置妥当,可将一幅图像分成多灰度级的灰度图,同理,也可对
彩色图像进行处理;
3)由于各个图像其特征不同,在种子、阈值上的选取也会有所不同,要根据具体情况而定。
4)在这里,种子选取了满足一小段特定灰度值的点,已避免漏过某些模糊区域,(因不含某个灰度值的点而漏过);
5)该算法不足之处是运算量大,占用时间多。