四轴控制器使用说明书
GTS四轴运动控制器用户手册

运动中没有义务或责任对由此造成的附带的或相应产生的损失负责。
联系我们
固高科技(深圳)有限公司
地 电 传 网 址:深圳市高新技术产业园南区深港产学研基 地西座二楼 W211 室 话:0755-26970817 26737236 真:0755-26970821 址: 26970824 电 传 网
功能说明................................................................................................................................................ 11 快速使用................................................................................................................................................ 12 开箱检查................................................................................................................................................ 12 安装场所................................................................................................................................................ 12 准备工作................................................................................................................................................ 12 安装步骤................................................................................................................................................ 13 步骤 1:将运动控制器插入计算机............................................................................................ 13 步骤 2:安装运动控制器驱动程序............................................................................................ 13 步骤 3:建立主机和运动控制器的通讯.................................................................................... 18 步骤 4:连接电机和驱动器........................................................................................................ 19 步骤 5:连接运动控制器和端子板............................................................................................ 19 步骤 6:连接驱动器、系统输入/输出和端子板....................................................................... 20
tb509四轴飞行器操作说明

TB509四轴飞行器操作说明1. 简介TB509四轴飞行器是一种小型无人机,具有稳定的飞行性能和灵活的操控能力。
本操作说明将介绍如何正确操作TB509四轴飞行器,包括起飞、降落、悬停、前进、后退、左右平移、旋转等基本操作。
2. 准备工作在操作TB509四轴飞行器之前,需要进行以下准备工作: - 确保电池电量充足,并正确安装到飞行器上。
- 将遥控器与飞行器进行配对。
- 找到开阔的空地,远离高楼、电线等障碍物。
3. 操作步骤步骤1:起飞1.将遥控器的油门推到最低位置。
2.飞行器和遥控器都打开电源。
3.将遥控器的油门缓慢推至最高位置,观察飞行器是否开始起飞。
4.如果发现偏移或不稳定,可以通过微调遥控器上的方向杆来调整姿态。
步骤2:悬停1.在成功起飞后,将油门推至中间位置,飞行器将悬停在空中。
2.如果飞行器出现晃动或不稳定,可以通过微调遥控器上的方向杆来调整姿态。
步骤3:前进、后退、左右平移1.前进:将遥控器的右操纵杆向前推动,飞行器将向前飞行。
2.后退:将遥控器的右操纵杆向后拉动,飞行器将向后飞行。
3.左平移:将遥控器的左操纵杆向左推动,飞行器将向左平移。
4.右平移:将遥控器的左操纵杆向右推动,飞行器将向右平移。
步骤4:旋转1.顺时针旋转:将遥控器的左操纵杆顺时针旋转,飞行器将顺时针旋转。
2.逆时针旋转:将遥控器的左操纵杆逆时针旋转,飞行器将逆时针旋转。
步骤5:降落1.将遥控器的油门缓慢推至最低位置,飞行器开始降落。
2.在降落过程中,观察飞行器的高度,并适时微调油门,以确保平稳降落。
4. 注意事项1.在操作飞行器时,要保持冷静,不要过度操控。
2.飞行器应该在开阔的空地上操作,远离人群和障碍物。
3.飞行器不应该在恶劣天气条件下飞行,如大风、雨雪等。
4.在起飞和降落时要特别注意安全,避免伤害自己或他人。
5.飞行器的电池电量应该足够进行操作,并及时充电。
以上就是TB509四轴飞行器的操作说明。
希望通过本文的介绍,您能够正确、安全地操作TB509四轴飞行器,并享受到无人机带来的乐趣。
乐迪 Pixhawk 飞控 四轴(ArduCopter)使用说明书

Pixhawk多轴使用说明书(V1.4.2)乐迪Pixhawk飞控四轴(ArduCopter)版本信息介绍V1版本:完善基本操作说明V1.1版本:添加失控保护介绍V1.3版本:添加日志,EKF失控保护的介绍V1.4版本:飞行模式和解锁故障保护的详细介绍V1.4.1版本:完善电流计设置V1.4.2版本:修改.net、MP的下载链接、修改罗盘的校准方法简介非常感谢您购买深圳市乐迪电子有限公司生产的pixhawk飞控。
Pixhawk自动驾驶仪(简称pix)是一款非常优秀而且完全开源的自动驾驶控制器,他的前世就是大名鼎鼎的APM,由于APM的处理器已经接近满负荷,没有办法满足更复杂的运算处理,所以硬件厂商采用了目前最新标准的32位ARM处理器,第一代产品是PX4系列,他分为飞控处理器PX4FMU和输入输出接口板PX4IO。
PX4系列可以单独使用PX4FMU(但是接线很复杂),也可以配合输入输出接口板PX4IO来使用,但是因为没有统一的外壳,不好固定,再加上使用复杂,所以基本上属于一代实验版本。
通过PX4系列的经验,厂商终于简化了结构,把PX4FMU和PX4IO整合到一块板子上,并加上了骨头形状的外壳,优化了硬件和走线,也就是这款第二代产品Pixhawk。
可应用于固定翼、直升机、多旋翼、地面车辆等,建议:在您阅读本说明书时,边阅读边操作。
您在阅读这些说明时,如遇到困难请查阅本说明书或致电我们售后(0755-********)及登陆航模类论坛(如:/forum.php?mod=forumdisplay&fid=277泡泡老师教程,,航模吧,乐迪微信公众平台,乐迪官方群:334960324)查看相关问题问答。
乐迪微信公众平台乐迪官方群售后服务条款1,本条款仅适用于深圳市乐迪电子有限公司所生产的产品,乐迪通过其授权经销商销售的产品亦适用本条款。
2,乐迪产品自购买之日起,一周内经我司核实为质量问题,由乐迪承担返修产品的往返快递费,购买乐迪产品超过一周到一年内经我司核实为质量问题,用户和乐迪各自承担寄出返修产品的快递费。
型号s186F的四轴空中飞行器使用说明
型号s186F的四轴空中飞行器使用说明一、起飞操作步骤1、打开遥控器的电源开关,遥控器的指示灯此时为闪亮,必须将油门先推至最大控制行程,再归置最底位,指示灯变为常亮。
遥控器进入正常用遥控状态。
2、将电池安装到飞碟的电池架上。
接通飞碟上的电源。
3、将飞碟平稳放在平整的地面上,让接收板上的红色指示灯从快闪状态变为慢闪状态,飞碟进入遥控状态。
重要提示:因飞碟通电后接收板上的陀螺仪需要和水平面校正,必须确保放置的地面是水平面。
飞碟才能进入正常的遥控状态,并且遥控和飞行器的开关顺序一定要严格按照步骤来,否则容易导致飞碟失控。
二、飞行前附加说明1、白色螺旋桨为飞碟前面,黑色螺旋桨为飞碟后面。
2、飞碟通电后,检查螺旋桨旋转方向。
左前方/右后方螺旋桨顺时针方向旋转,右前方/左后方螺旋桨逆时针方向旋转。
3、飞行中若出现飞碟偏向一边,可以通过遥控器微调来调整。
三、飞行控制1、当左右操纵杆向左、右动作时,飞碟同步向左、右飞行。
2、当油门操纵杠向上、下动作时,飞碟同步向上、下飞行。
3、当转向操纵杠向左、右动作时,飞碟头部同步向左、右飞行。
4、当前后操纵杆向上、下动作时,飞碟同步向前、后飞行。
使用步骤详解:1、将四旋翼飞行器的开关调至ON,将遥控器的开关调至ON。
2、把遥控器的摇杆,上下左右摇杆推拉一下,进行配对,如果遥控器鸣一声,则视为配对成功3、推动摇杆,进行四旋翼飞行器的控制。
4、拉杆推动练习,将左摇杆推上即为飞机往上向上飞,如果将左摇杆向下推则为下降,右摇杆则为控制左右前进方向。
5、降落,缓缓地将摇杆向下拉,右右摇杆不要动左摇杆慢慢的向下拉直至降落成功。
四轴可编程控制器说明书(含圆弧直线实现方式)

四轴可编程控制器说明书(含圆弧直线实现方式)珩源电子科技 一、 功能与接线描述1、可控制xy两轴电机配合走直线插补和圆弧插补;2、可控制4路步进电机同时工作,工作频率每路100KHZ(最高达150KHZ):特别注意的是对应盒子上的标注,DR1为X轴的方向控制脚,DR2为Y轴的方向控制脚,DR3为Z轴的方向控制脚,DR4为C轴的方向控制脚; CP1为X轴的脉冲控制脚,CP2为Y轴的脉冲控制脚,CP3为Z轴的脉冲控制脚,CP4为C 轴的信号控制脚。
与驱动器接的时候,以X轴为例,把驱动器公开端(控制盒子上标注的5V输出脚)接你方驱动器的CP+\DR+;用控制器的CP1接控制器的CP-,用控制器的DR1接你方驱动器的DR-。
这种接法叫单端接法。
如下图一所示。
3、5路继电器输出(常开触点、内部加了RC去弧电路),7路OC输出(控制外部24V继电器或电磁阀)特别注意:对应文本上设定Y1-7表示控制7路OC;Y8-12对应本控制器的5路继电器输出。
如下图一所示。
4、13路光耦隔离输入(每路外部接到地表示接通):盒子上标为YL1-YL13,分别对应输入X1-X13(在文本上设定):特别说明的是对应外部的输入信号,平时悬空或为24V(控制器工作的输入电源24V),当外部输入信号为电源24V的地的时候表示这个输入口有效。
经常外接开关按钮,或光电反馈开关,接触开关反馈信号等。
如下图一所示。
5、通过串口与外部文本进行通信功能6、可存储10个工程,每个工程可以设置50步二、编程界面和说明1、运行主界面X\Y\Z\C 四轴的运行参数进行实时显示,单位是MM。
参数对应按键,进入相应的设定界面。
测试对应按键,进入相应的测试界面。
启动对应按键,对应启动当前的工程进行运行。
停止对应按键,将停止当前运行的工程,不管当前运行工程到哪一步。
当“启动”时将重新按工程的第一步开始运行。
量产是对应工程的运行次数,假定工程运行一次,加 1.可以按“SET”键进行设定数字,比如清“0”。
SMC四轴控制器说明书jxc73
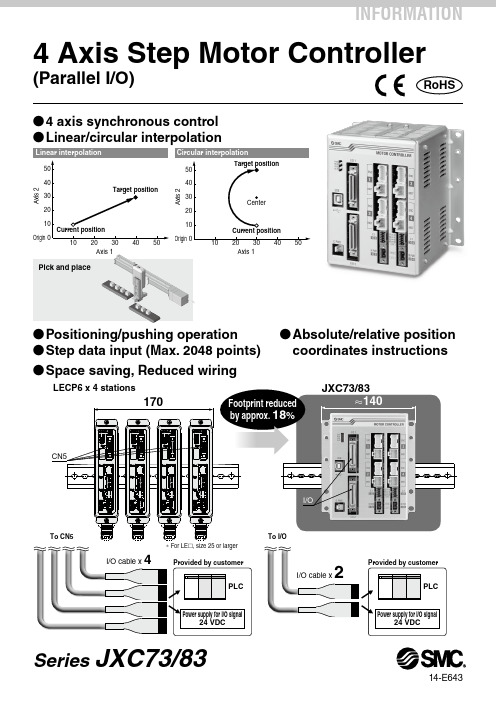
CIR-R∗
CIR-L∗
SYN-I
∗ Performs a circular operation on a plane using Axis 1 and Axis 2.
Controller Setting Software (Connection with a PC)
Easy file management
Step data window
Abundant edit functions
Copy Delete Cut Paste (Insert) Paste (Overwrite) Insert The selected step data is copied on the clipboard. The selected step data is deleted. The selected step data is cut. The step data copied to the clipboard is inserted in the cursor position. The step data copied to the clipboard is overwritten in the cursor position. A blank line is inserted in the selected step data line.
(Controller setting software and USB cable are included.) (Option) JXC-W1
V Controller setting software PC
Provided by customer (Option) JXC-W1-1
Page 8
MTS SNC240_440 2 4轴控制器产品说明书
SNC240 / SNC4402 or 4 axes controller with Linear & Circular Interpolation< Features >SNC240 ( 2 Axes ) or SNC440 ( 4 Axes ) controller can be used to control Point-to-point, linear and circular interpolation operation for the stepper motors or pulse train servo motors of the general purposes 2 axes or 4 axes tables. The acceleration of this controller can be switched between S-curve and linear acceleration. With the S-curve acceleration profile, smoother operation is made possible by eliminating vibrations.Closed loop control with compensation is made possible with the use of built-in encoder inputs. Teaching operation is also available for up to 2,000 points. Co-ordinate operations, Palletizing, Complextrapezoidal drive, Backlash compensation and Sub-task functions are also built-in.Programming is made simple via a handheld loader unit or via RS232C communication. The 32 generalpurpose inputs and 16 general purpose outputs can be used to interface to external peripheral for a more complex system control.System Overview32 INPUTS /16 OUTPUTS (SNC240) OR 32 PUTPUT (SNC440)DEDICATED INPUTS :SENSORS, E-STOP, ETC.AC POWER SUPPLY INPUTLOADERITEMS DESCRIPTIONS Control system Microprocessor control systemNumber of axes SNC240 : 2 axes, SNC440 : 4 axes(PTP, linear or circular interpolation controlled )Motors used with Stepping motor or pulse train input servo motorProgram capacity Program : 2,000 lines ( Main program : 16, sub-program: 84 )Position data : 2,000 positionsStorage means Flash Memory ( rewritable 100,000 times )Programming language Enhanced G-codeControl functions Manual mode: Origin search, virtual origin set/return, coordinate specifyfeed, scan feed, index feed, step feed, I/O operation, sensor /driver signal operation, condition setting, position data storagePlay mode : Program running ( automatic execution, 1-line execution,external activation, online execution ), moving positional dataProgram mode: Generation, editing, and deleting programs and positional data,teaching, uploading and downloadingParameter : Motor types, sensor logic, encoder set up, etc.Program functions Set up conditionsreturn to originsetting up the quantity of indexmoving instructiongeneral purpose I/Orepeatssubroutinesend of programvirtual origin setting timertemporary stop of programcoordinate system switchingpalletizing operationcomplex trapezoidal driveunconditional jumpdriver control operationregister mathematical operation register conditional jumpAcceleration system S-curve drive ( 8 types ), linear drivePulse scaling factor The amount of movement per pulse : 1~9,999,999Command system Loader input / Host computer / external activation signalMovement range The range of setting 1 moving instruction : 0~±9,999,999Frequency range Low speed : 1~65.535 Kpps in 1pps intervalStandard : 12.5~819.187 Kpps in 12.5pps intervalHigh Speed : 50~3,276.75 Kpps in 50pps intervalAcceleration Low speed : 10~ 1,000 pps/msec for 100% setting ( 0.1% interval )Standard : 125~125,000 pps/msec for 100% setting ( 0.1% interval )High speed : 500~500,000 pps/msec for 100% setting ( 0.1% interval ) Driver Interface Clock output: 2-clock or 1-clock system ( open collector or Line driver )Motor OFF output: CO for stepper or SERVO ON for servoAlarm input: selectable logicIn-position input: for servoDeviation counter reset output: for servo motor 1-shot pulse: 0.1 secEncoder input: A/B/Z phases ( Multiple of 1/2/4 is possible )Machine sensor I/F Both end over-run, near origin, and origin sensor (selectable sensor logic ) General Purpose I/O 32 Input : Photo-coupler isolated 5mA internal power supply (+24V)16 Output : Photo-coupler isolated, open collector 0.5A voltage resistance: 35V Dedicated I/O 6 Inputs : Photo-coupler isolated 5mA internal power supply (+24V)Program activation input, emergency stop input, deceleration/stopinput, RESET input, manual operation input, origin return input4 Output : Photo-coupler isolated, open collector 0.5A voltage resistance:35V,ready output, output while moving, error output, origin positionProgram selection input 4 Inputs : Photo-coupler isolated 5mA internal power supply is used.16 programs can be triggered ( program #0~15 ) Externalcommunication I/FRS232-C : 1 channel parameter can be set upSetup DIP switch Parameter operation : permitted / prohibited Parameter functionsSet up the amount of movement for 1 pulse Software limit are set upConditions for automatic operation are set up Conditions for origin return is set upPosition of decimal point for coordinate display Origin return axis sequence is set up Closed control is valid or invalidMultiplication ratio and direction of encoder input are set Motor types and sensors are setS-curve slope (including pattern) / linear slope RS232C parameter is set Highest speed is setAuto return to origin before activating program can be setContents of execution to be displayed or not displayed during execution Backlash compensation can be valid or invalid Memory clearInput power supply Single Phase AC 85V ~ 264V ( 100W maximum power consumption ) Noise resistance 1500V/1usec or more ( Single controller )Momentary stoppage 20msec minimum ( when the loader input is stopping for emergency )Ambient environment During operation : Temp 0~50°C ( Humidity : 30~80%,No dew condensation ) During storage : Temp 0~60°C ( Humidity : 20~90% ) External dimension ( excluding mounting bracket ) SNC440 : 100 (W) x 225 (H) x 122 (D) mm SNC220 : 80 (W) x 225 (H) x 122 (D) mmLoader SNC440PL : 125 (W) x 194 (H) x 25 (D) mm WeightSNC440 : 2.0 Kg SNC240 : 1.5 Kg Loader : 0.5 KgOrdering Information :- Series nameEncoder input :“440” - 4 axes “L” - Line driver “240” - 2 axes “P” - Opto-coupler“PL” – Loader unit。
四轴飞行器使用说明书
四轴飞行器使用说明书第一章概述第二章飞行器组装1.将四轴飞行器的主体组件和螺旋桨紧密连接。
确保连接牢固并正确插入。
2.连接电池。
将电池安装在飞行器上,并在正确的极性方向安装。
3.开关启动。
找到开关并将其打开,确保飞行器处于待机状态。
第三章飞行前准备1.检查环境。
确保飞行场地无障碍物,空旷且没有人群出现。
2.自检。
检查飞行器的每个部件是否正常,包括电池电量、遥控器信号等。
3.调校飞行器。
根据需要进行飞行器的调校,以确保飞行器稳定飞行。
第四章飞行操作1.手持遥控器。
将遥控器握在手中,确保握持舒适且稳定。
2.连接遥控器和飞行器。
按照飞行器和遥控器的配对操作,将其成功连接。
3.起飞。
将油门推至50%以上,飞行器将开始起飞。
需要注意的是,在起飞时要稳定和缓慢地推动油门,以防止飞行器突然上升或下降。
4.飞行控制。
通过遥控器上的摇杆控制飞行器的上升、下降、前进、后退、转向等操作。
5.悬停。
通过调整遥控器上的摇杆,将飞行器稳定在空中悬停。
6.降落。
将油门缓慢推至最低位置,飞行器将开始降落。
同样需要稳定和缓慢地操作油门。
第五章技巧与注意事项1.熟练操作。
在飞行前建议进行一些预备练习,熟练掌握遥控器的使用方法以及飞行器的操控方式。
2.飞行器的重量。
请注意,本款四轴飞行器的重量可能较轻,容易受到风等外部因素的影响,在飞行时请注意风力状况,避免因风力较大导致飞行器无法控制。
3.距离限制。
在操作飞行器时,请遵守当地相关法规和规定,确保飞行器的远离建筑物、人群和飞行限制区域。
4.遥控器电池。
为了确保飞行器的稳定和遥控器的正常操作,定期检查并更换遥控器的电池。
第六章常见问题及解决方法1.飞行器不能起飞。
请检查电池是否安装正确,电量是否充足,是否成功连接遥控器。
2.飞行器不稳定。
需进行飞行器的调校操作,确保各个部件的运作正常。
3.飞行器操作不灵敏。
请检查遥控器的信号是否正常,电池是否充足。
4.飞行器无法连接遥控器。
重新按照配对操作连接飞行器和遥控器,确保不受其他无线信号的干扰。
大四轴使用教程及注意事项
遥控器使用教程篇
注意事项
注意飞行前电池满电,起飞预热一会,大四轴与小四轴遥控器不一致,一个是左手油门,一个是右手油门,起飞前注意除油门外,其他摇杆位置保持中位
飞机上电前先开遥控;
飞行完毕,给飞机断电再关遥控。
起飞与飞行完毕后检查油门是否回到最低位;
起飞前确认卫星信号良好,显示3D定位;
新手使用飞行模式2(GPS定点飞行)起飞。
起飞步骤:
遥控上电
检查遥控是否拨到准确位置(油门保持低位,飞行模式选择拨到自稳模式)
飞机上电
使用数传与地面连接(57600)
检查卫星状况
正常后拨动开关至留待模式,按飞机上解锁开关油门向左加锁,油门向右解锁
慢推油门至一米高
做各项动作,观察飞行器稳定后方可飞高飞远降落教程:
自动模式:
拨杆拨动至降落模式
待降落后油门拉直最低,
拨杆拨动至自稳模式
飞机断电
遥控断电
地面站使用教程。
v7四轴点胶机控制器-手持版说明书V7
双Y智能点胶机控制系统(手持版)说明书目录1.产品介绍 (3)1.1产品概述 (3)1.2功能简介 (3)1.3功能特性 (3)1.4产品列表 (4)2.接线说明图 (5)2.1 控制器接线引脚定义 (5)2.2 控制器接线说明....... . (6)2.3 系统连接示意图 (7)2.4 转接板接线说明 (8)2.5 转接板接线示意图............................................................................................ . (9)2.6 安装尺寸.......................................................................................................... (10)3.按键说明 (11)3.1手持盒按键图 (11)3.2手持盒按键说明 (11)4.手持盒操作说明 (13)4.1开机画面介绍 (13)4.2主菜单功能介绍 (15)4.3新增功能操作 (19)4.4插入指令操作 (28)4.5删除指令操作 (28)4.6复制指令操作 (28)4.7 Y1复制到Y2操作 (28)4.8阵列复制操作 (29)4.9偏移操作 (29)4.10批量修改 (30)4.11自动圆角 (30)4.12类型批量修改 (30)4.13系统 (31)4.14执行方式操作 (33)4.15复位方式操作 (33)4.16产量设定 (34)4.17默认参数 (34)4.18拉丝工艺 (35)4.19停机位置 (35)4.20空移速度 (36)4.21定滴功能 (36)4.22对针操作 (37)4.23 MARK点对针操作 (37)5.注意事项 (38)5.1装机事项 (38)1.产品介绍1.1产品概述本系统是由本公司专业数控团队为点胶机行业量身定做的低成本、高浓缩、高集成度的智能点胶机控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四轴控制器使用说明书目录版权申明 .................................................................................................... 错误!未定义书签。
第一章概述 .. (5)1.1 产品简介 (4)1.2应用领域 (4)1.3图片展示 (4)第二章PCB结构及功能 (6)2.1 MCU简述 (5)2.2 PCD4641简述 (6)2.2.1PCD4641概要 (6)2.2.2特长 (6)2.2.3主要功能介绍 (6)2.3 MCU控制芯片方式说明 (8)2.4 调试接口接线线序说明 (10)2.5 BOOT接头说明 (11)2.6启动开关 (11)2.7电气接口 (12)2.7.1驱动器接头 (12)2.7.2运动反馈信号接头 (14)2.7.3励磁时序信号和通用IO口接头 (13)第三章FSMC简介及接线说明 (15)3.1 FSMC简述 (15)3.1.1 FSMC概要 (15)3.1.2 FSMC映射地址空间 (17)3.1.3 技术优势 (16)3.2 MCU访问PCD4641线序说明 (17)第四章MCU使用FSMC访问PCD4641的具体实现 (18)4.1 PCD4641A并行接口方法 (20)4.2 命令 (19)4.2.1 启动方式命令 (19)4.2.2 控制方式命令 (20)4.2.3 寄存器选择命令 (23)4.2.4 输出模式命令 (24)4.2.5状态寄存器 (26)4.3 具体的C语言实现 (24)第五章上位机通信 (28)5.1 上位机与四轴控制器的硬件连接 (28)5.2 上位机与四轴控制器的通信连接 (29)5.3 如何控制四轴控制器 (30)第六章四轴控制器开发环境使用说明 (36)6.1 与PCB板的硬件连接 (36)6.2 驱动的安装 (32)6.3 IAR开发环境的安装 (34)6.4 IDE相关设置 (35)6.5 程序的开发设计 (42)第七章下载程序 (43)7.1 用USB串口线连接四轴控制器 (39)7.2 下载程序 (44)第八章使用安全注意事项 (43)第一章概述1.1 产品简介感谢您选择脉冲电子四轴控制器,为回报客户,我们将以品质一流的四轴控制器、完善的售后服务、高效的技术支持,帮助您建立自己的运动控制系统。
Four Axis Controller V3.1是脉冲电子自主研发生产的四轴控制器,可以实现最多四个轴的运动控制、低成本构建控制系统。
本控制器可用1块芯片进行1~4轴的控制,可控制最大400Kpps的AC伺服电机进行和步进电机。
此外本控制器的控制芯片内置2相(4相)步进电机驱动时序可以直接驱动步进电机。
希望我们优越的性能、优异的质量和优秀的性价比可以帮助您成功地完成您的产品设计以及运动控制项目。
1.2应用领域本控制器适应领域广泛,包括印刷机械、装配生产线、自动化设备、电子加工设备等。
1.3图片展示图1.3.1第二章PCB结构及功能2.1 MCU简述四轴控制器选择的是STM32F407ZGT6作为MCU,该芯片是STM32F4系列里面配置较高的型号,它拥有的资源包括:集成FPU和DSP指令,并具有192KB SRAM、1024KB FLASH、12个16位定时器、2个32位定时器、2个DMA控制器(共16个通道)、3个SPI、2个全双工I2S、3个I2C、6个串口、2个USB(支持HOST /SLAVE)、2个CAN、3个12位ADC、2个12位DAC、1个RTC(带日历功能)、1个SDIO接口、1个FSMC接口、1个10/100M以太网MAC控制器、1个摄像头接口、1个硬件随机数生成器、以及112个通用IO口等。
该芯片的配置十分强悍,很多功能相对STM32F1来说进行了重大改进,比如FSMC的速度,F4刷屏速度可达3300W像素/秒,而F1的速度则只有500W左右。
同时,STM32F4的主频也提高了很多,达到168Mhz(可获得210DMIPS的处理能力),这使得STM32F4尤其适用于需要浮点运算或DSP处理的应用,也被称之为:DSC,具有非常广泛的应用前景。
◆STM32F4相对于STM32F1,主要优势如下:◆更先进的内核。
STM32F4采用Cortex M4内核,带FPU和DSP指令集,而STM32F1采用的是Cortex M3内核,不带FPU和DSP指令集。
◆更多的资源。
STM32F4拥有多达192KB的片内SRAM,带摄像头接口(DCMI)、加密处理器(CRYP)、USB高速OTG、真随机数发生器、OTP存储器等。
◆增强的外设功能。
对于相同的外设部分,STM32F4具有更快的模数转换速度、更低的ADC/DAC工作电压、32位定时器、带日历功能的实时时钟(RTC)、IO复用功能大大增强、4K字节的电池备份SRAM以及更快的USART和SPI通信速度。
◆更高的性能。
STM32F4最高运行频率可达168Mhz,而STM32F1只能到72Mhz;STM32F4拥有ART自适应实时加速器,可以达到相当于FLASH零等待周期的性能,STM32F1则需要等待周期;STM32F4的FSMC采用32位多重AHB总线矩阵,相比STM32F1总线访问速度明显提高。
◆更低的功耗。
STM32F40x的功耗为:238uA/Mhz,其中低功耗版本的STM32F401更是低到:140uA/Mhz,而STM32F1则高达421uA/Mhz。
2.2 PCD4641简述2.2.1PCD4641概要PCD4641芯片是NPM公司设计开发的一款内置驱动两相步进电机驱动时序的脉冲控制的多轴运动控制大规模集成电路。
可将本LSI当作步进电机的驱动芯片用来构成步进电机控制系统。
LSI根据CPU的读数据、写命令可进行速度和位置等的控制2.2.2特长◆ 3.3V单一电源(输入/输出/ 输入输出端子为5V)◆最高输出频率◆ 4.91Mpps(标准时钟:9.8304MHz、速度倍率:300倍)◆ 2.46Mpps(标准时钟:4.9152MHz、速度倍率:300倍)◆与CPU接口方式有两种:8bit并行接口模式、4线同步串行模式◆2相步进电机励磁时序输出功能◆单极/双极◆2-2相励磁/1-2相励磁◆励磁时序输出用的4个端子也可作为通用输出端子使用◆脉冲序列信号输出功能:CW/CCW脉冲、脉冲和方向信号◆直线/S字加减速控制方式◆外部启动/停止控制◆连续动作模式、原点复位动作模式、定位动作模式、定时动作模式◆怠速脉冲输出功能◆当前位置技术(24bit)◆减速点自动设定功能◆由ORG,+EL,-EL,STP信号的停止方法可供选择(立即停止/减速停止)◆有三种型号供选择:单轴PCD4611A、两轴PCD4621A、四轴PCD4641A2.2.3主要功能介绍-A +A -B +B-A +A -B +B-A +A -B +B-A +A -B +BX 轴Y 轴Z 轴U 轴2.3 MCU 控制芯片方式说明结构框图硬件结构2.4 调试接口接线线序说明四轴控制器STM32F4采用标准10针JTAG 接口电路如图2.4.1所示图2.3.12.5 BOOT 接头说明四轴控制器MCU 的程序自启动运行模式设置端口电路如图2.5.1所示:图2.4.1图2.4.2这是四轴控制器的启动模式选择端口(BOOT ),STM32有BOOT0(B0)和BOOT1(B1)两个启动选择引脚,用于选择复位后STM32的启动模式。
在控制器上,我们通过跳线帽选择STM32的启动模式。
上图的BOOT0和BOOT1用于设置STM32的启动方式,其对应启动模式如表2.5.1所示表 2.5.2 BOOT0、BOOT1启动模式表按表2.5.2,一般情况下如果我们想用用串口下载代码,则必须配置BOOT0为1,BOOT1为0,而如果想让STM32一按复位键就开始跑代码,则需要配置BOOT0为0,BOOT1随便设置都可以。
这里四轴控制器STM32F4开发板专门设计了一键下载电路,通过串口的DTR 和RTS 信号,来自动配置BOOT0和RST 信号,因此不需要用户来手动切换他们的状态,直接串口下载软件自动控制,可以非常方便的下载代码。
图 2.5.1启动模式图2.5.32.6启动开关当需要控制器运行的时候,按开关Start.S1,此时开关与MCU 的84PIN/PH7端口连接,控制器运行;当需要控制器停止的时候,按开关Start.S1,此时开关与MCU 的83PIN/PH6端口连接,按制器停止。
如图2.6.1所示图 2.6.1启动模式图2.6.22.7电气接口 2.7.1驱动器接头如下图所示的四个接头可分别接四个驱动器控制四个轴,信号分别为CW+、CW-、CCW+、CCW-;分别输出脉冲信号的差分信号和方向信号的差分信号。
2.7.2运动反馈信号接头如下图所示为运动控制的反馈信号接口可分别接 降速信号、原点信号、限位信号。
两个开关用作外部启停信号开关。
图2.7.1图2.7.22.7.3励磁时序信号和通用IO 口接头如下图所示的接口,可以作为普通IO 用,也可作为驱动步进电机的励磁时序接口。
第三章 FSMC 简介及接线说明3.1 FSMC 简述 3.1.1 FSMC 概要FSMC(Flexible Static Memory Controller ,可变静态存储控制器)是STM32系列采用的一种新型的存储器扩展技术。
在外部存储器扩展方面具有独特的优势,可根据系统的应用需要,方便地进行不同类型大容量静态存储器的扩展。
能够与同步或异步存储器和16位PC 存储器卡连接,STM32F4的FSMC 接口支持包括SRAM 、NAND FLASH 、NOR FLASH 和PSRAM 等存储器。
同类型的静态存储器,满足系统设计对存储容量、产品体积以及成本的综合要求。
FSMC 能够连接同步、异步存储器和 16 位 PC 存储卡。
其主要用途如下:● 将 AHB 数据通信事务转换为适当的外部器件协议 ●满足外部器件的访问时序要求所有外部存储器共享地址、数据和控制信号,但有各自的片选信号。
FSMC 一次只能访问一 个外部器件。
FSMC 具有以下主要功能:图2.7.3●连接静态存储器映射的器件:—静态随机访问存储器(SRAM)—只读存储器(ROM)— NOR Flash/OneNAND Flash— PSRAM(4 个存储区域)●两个带有ECC 硬件的NAND Flash 存储区域,可检查多达8 KB 的数据●16位PC 卡兼容设备●支持对同步器件(NOR Flash 和 PSRAM)的突发模式访问●8 或 16 位宽的数据总线●每个存储区域有独立的片选控制●每个存储区域可独立配置●可对时序进行编程,以支持各种器件,尤其是:—等待周期可编程(最多15 个时钟周期)—总线周转周期可编程(最多15 个时钟周期)—输出使能和写入使能延迟可编程(最多15 个时钟周期)—独立的读和写时序和协议,以支持各种存储器和时序●写使能和字节通道选择输出,可配合 PSRAM 和 SRAM 器件使用●将 32 位的 AHB 事务转换为针对外部 16 位或 8 位器件进行的连续 16 位或 8 位访问。