adams悬架性能分析
基于ADAMS的汽车前悬挂装置仿真分析
基于ADAMS的汽车前悬挂装置仿真分析基于ADAMS的汽车前悬挂装置仿真分析摘要:汽车悬挂系统是汽车行驶过程中非常重要的组成部分,对汽车的操控、乘坐舒适性以及行驶稳定性都有着重要影响。
本文利用ADAMS软件对汽车前悬挂装置进行了仿真分析,旨在探究不同悬挂参数对汽车性能的影响,并优化悬挂系统设计方案。
1. 引言汽车前悬挂装置是连接车辆车身和路面的一个重要部件,主要作用是吸收道路不平造成的冲击,保证车辆行驶过程中的平稳性和舒适性。
对前悬挂装置进行仿真分析有助于提高悬挂系统设计的准确性和可靠性。
2. ADAMS软件介绍ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款基于多体动力学原理的仿真软件,具有广泛的应用领域。
它可以模拟机械系统的运动、力学特性以及系统之间的相互作用,并提供了丰富的分析工具和优化算法。
3. 汽车前悬挂系统模型建立本实验选取了一款某汽车的前悬挂系统进行仿真分析。
首先,通过测量实际车辆的尺寸参数和悬挂装置的特征参数,建立了汽车前悬挂系统的三维模型。
然后,将该模型导入到ADAMS软件中,并设置初始条件和约束条件。
4. 悬挂系统刚度参数仿真在初始模型的基础上,通过调整悬挂系统的刚度参数,分别进行了横向、纵向和侧向的仿真分析。
结果显示,随着悬挂系统刚度的增加,车辆在行驶过程中的横向加速度和纵向加速度均呈现减小的趋势,而侧倾角则呈现增加的趋势。
5. 悬挂系统阻尼参数仿真在初始模型的基础上,通过调整悬挂系统的阻尼参数,分别进行了横向、纵向和侧向的仿真分析。
结果显示,随着悬挂系统阻尼的增加,车辆在行驶过程中的振动幅度逐渐减小,乘坐舒适性得到了提升。
6. 优化设计方案结合前面的仿真分析结果,综合考虑悬挂系统刚度和阻尼参数的影响,提出了一种优化的悬挂系统设计方案。
该方案在保证行驶稳定性和乘坐舒适性的基础上,能够最大限度地减小车辆在行驶过程中的横向加速度和纵向加速度,从而提升车辆的整体性能。
基于ADAMS的某乘用车前悬架K C性能分析与优化

基于ADAMS的某乘用车前悬架K C性能分析与优化第一章:绪论车辆悬架系统是汽车的重要组成部分之一,其主要功能是承受并缓解来自路面所产生的振动和冲击力,保障了行车的平稳性和舒适性。
而前悬架的重要性更甚,它直接影响着车辆的操控性能和行驶安全性。
因此,对于前悬架系统的研究和优化一直是汽车工业研究的热点和难点之一。
随着ADAMS仿真技术的发展和应用,有效地提高了对前悬架K C性能的模拟和分析能力,为系统的优化提供了可靠的技术支持。
本文将基于ADAMS仿真软件平台,针对某乘用车前悬架K C性能进行分析与优化,提高该车辆的操控性能和安全性。
第二章:某乘用车前悬架系统的结构和工作原理分析本章主要介绍某乘用车前悬架系统的结构和工作原理。
该车的前悬架系统采用麦弗逊式悬架,其特点是结构简单,重量轻,可靠性高。
该悬架系统主要由下控制臂、上控制臂、悬架弹簧、减振器、防护板以及连接各组件的螺栓等构成。
在行驶过程中,前轮的垂直位移通过弹簧和减振器的共同作用被转化为车身的纵向运动,从而实现了车辆的平稳行驶。
第三章:基于ADAMS的某乘用车前悬架系统建模和运动仿真本章主要介绍基于ADAMS的某乘用车前悬架系统建模和运动仿真方法。
采用ADAMS软件建立某乘用车前悬架系统的三维模型,进而进行前悬架K C性能的仿真分析。
通过建立系统的运动学和动力学模型,可得出任意时刻前悬架系统中各组件的位置、速度、加速度和力学反应等参数。
基于此,对前悬架系统的悬架弹簧刚度和减振器阻尼系数等重要参数进行优化,从而实现对前悬架K C性能的优化。
第四章:某乘用车前悬架系统K C性能分析与优化本章主要介绍某乘用车前悬架系统K C性能的分析和优化。
通过ADAMS仿真软件进行前悬架系统K C性能的模拟计算、绘制不同载荷情况下前悬架系统的运动学曲线和车辆的滚动刚度曲线,进而通过对比数据分析,确定前悬架系统的弹簧刚度、减振器阻尼系数以及上下控制臂参数等优化方案。
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
汽车悬架的性能开发专题资料集锦(二)
基于ADAMS的Z型悬架性能分析及四轮定位优化.pdf
建立Z型后悬架的ADAMS模型,分析了其悬架运动学和弹性运动学特性,将四轮 定位角动态变化与试验值做了对标,并且介绍了利用虚拟样机技术虚拟优化四 轮定位的方法。
基于ADAMS的刚柔耦合汽车悬架性能分析.pdf 在ADAMS软件中建立柔性体的方法;建立了刚柔耦合的汽车麦式独立前悬架与
悬架构件的柔性在建模中是不可忽略的, 建立刚柔耦合的悬架模型进行性能 分析是可行的并且是必要的。
悬架性能研究相关案例: 弹性元件对悬架性能的影响.pdf
随着现代轿车性能的不断提高,对悬架系统的缓冲、减振和导向性能的要求
愈加严格。轿车悬架中广泛采用的弹性元件的力学特性及其测试方法。对悬
架的空间弹性运动学问题进行了讨论,提出了处理此类问题的思路和方法, 为进一步分析整车行驶性能提供了依据。
轿车悬架性能对车身影响的分析与测试.pdf
微型汽车悬架的动态仿真方法.pdf 建立了微型汽车的两种四自由度动力学模型.其中,一种考虑车身纵向角振
动;另一种不考虑车身纵向角振动.推导出了计算公式,编制了悬挂系统特
性仿真计算的程序,并以长安微车为实例对加速度、相对动载、动挠度功率 谱和加速度均方根值进行了不同路面的模拟计算.
双连杆独立后悬架系统模型;对悬架系统进行运动学分析,并通过仿真结果与
实测数据的比较,证明了刚柔耦合悬架模型比刚体悬架模型更为准确。
乘用车前悬架的综合性能研究.rar
通过CATIA、ADAMS软件建立了半主动悬架的仿真模型、并依据悬架性能的评
定标准对悬架模型进行仿真分析,在与理论结果比较的基础上,实现了悬架性 能的改善。主要工作和成果如下:(1)首先对悬架系统的结构、控制及研究现 状与趋势进行了分析,阐明了本课题研究的意义。(2)在车辆行驶平顺性相关 的性能指标对比的基础上,分析了以车身加速度为评价指标的评价方法,最后, 建立了综合指标的平顺性评价函数。(3)应用CATIA、ADAMS分别建立了前后悬 架、转向系、发动机以及车身等各个子系统模型,并通过建立或修改信号交换 器将各个子系统组装成整车模型,为悬架系统性能的仿真分析做好准备。(4) 对所建模型进行车轮定位参数、前悬架刚度、前悬架侧倾性能的仿真分析,并 在此基础上进行了相应的参数优化,最后对悬架系统在整车中的性能发挥进行 了仿真分析。通过以上建模分析,将ADAMS仿真软件应用于汽车悬架系统仿真,
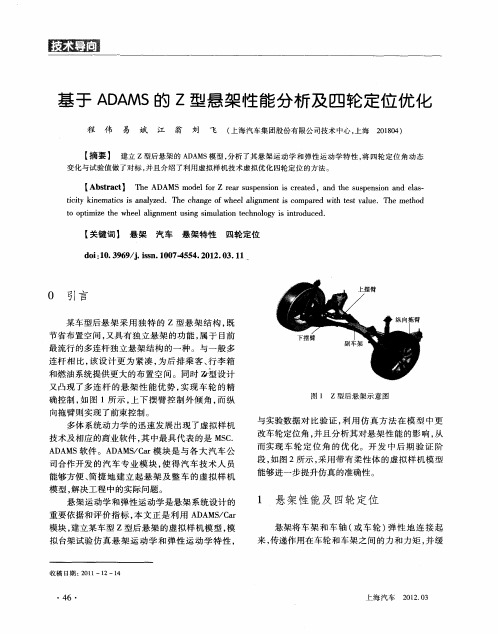
基于ADAMS的Z型悬架性能分析及四轮定位优化
A A / a 通 过对 轮胎 与试验 台 的接触平 面 D MS C r 加载 不 同 的载 荷 来 模 拟 悬 架 运 动 的各 种 工 况 , 同 时记 录 车轮 运 动 学 参 数 的变 化 , 与试 验 台 测 试 数 据进 行 对标 。主要 工况 包 括 : 平行 轮 跳 工况 、 轮 车 侧倾 工况 、 向力加 载 工 况 、 侧 回正力 矩 加 载工 况 以 及纵 向力 加 载 工 况 , 行 车轮 定 位 角 动 态 变 化 与 进
位移 以及 外 倾 、 束 和后 倾 的变 化 ) 其 特 性 主 要 前 ,
由悬 架几 何 关 系 决 定 ; 性 运 动 学 特 性 描 述 由轮 弹 胎和 路 面之 间的力 和 力矩 引起 的车 轮定 位 参 数 的 变化 , 特性 主要 由 悬 架 中橡 胶 衬 套 的 刚度 特 性 其 以及 零部 件 的柔性 决定 。
上海汽车 2 1. 3 0 20
・
4 ・ 7
J
— —
试 验值
倾不 足转 向性 , 即在 独 立悬 架 中 , 外侧 车 轮 在 _ I L 时产 生前 束 , 下落 时 产生 后束 。如 图 6所示 , 而 试 验配 重为 两名 乘 客 , 内倾 角 随 侧 倾 角 的变 化 率 为 50 % , . 3 而其 仿真 值 为 4 8 % 。 .8
最流行 的多连 杆独 立 悬架 结 构 的一种 。与一 般 多
连杆 相 比 , 该设 计更 为 紧凑 , 为后 排 乘 客 、 李 箱 行 和燃 油系 统提供 更 大 的布 置 空 间。 同时 型 设计 又 凸现 了多 连 杆 的悬 架 性 能 优 势 , 现 车 轮 的精 实 确控 制 , 图 1所 示 , 下 摆 臂 控 制外 倾 角 , 纵 如 上 而
基于ADAMS的悬置刚度仿真指南

基于ADAMS的悬置刚度仿真指南悬置系统是汽车重要的组成部分之一,悬置系统的刚度对于汽车的操控性、行驶稳定性以及乘坐舒适度具有重要的影响。
在汽车的设计与开发过程中,需要对悬置系统的刚度进行仿真分析,以评估悬置系统的性能与优化方案。
ADAMS是一款基于多体动力学原理的仿真软件,通过ADAMS可以对悬置系统进行仿真分析,评估不同刚度设置下的悬置系统性能,从而优化悬置系统的设计。
以下是基于ADAMS的悬置刚度仿真指南:1.建立悬置系统模型:首先,根据实际车型的悬置系统设计,建立ADAMS中的刚体系统模型。
模型的建立包括车身、悬挂弹簧、减震器等关键部件。
2.约束和连接:根据实际情况,为刚体系统中的各个部件添加合适的约束和连接关系,以模拟实际的力学性能。
3.刚度参数设置:设置悬挂弹簧和减震器的刚度参数。
通过设置不同的刚度值,可以评估悬挂系统在不同刚度下的动力学性能。
4.路面加载:设置适当的路面加载,在ADAMS中模拟实际道路的动力学输入。
5.运行仿真:运行ADAMS仿真,获取悬置系统在不同刚度设置下的动力学响应,如车身的加速度、悬挂系统的行程、悬挂系统的受力情况等。
6.评估性能:分析仿真结果,评估悬置系统在不同刚度设置下的性能表现。
比较不同刚度设置下的悬置系统动力学响应,选择最优的刚度设置。
7.优化方案:根据评估结果,对悬置系统的刚度进行优化设计。
可以通过改变悬挂弹簧的刚度、减震器的阻尼等方式进行优化,并重新进行仿真分析以验证优化方案的效果。
8.结果分析与报告:对优化后的悬置系统进行结果分析,并将分析结果整理成报告,为后续的悬置系统设计和优化提供参考。
基于ADAMS的空气悬架客车运动性能仿真分析

一
—
—
73 9
1 3 9
一
9 O
前桥采 用 非独 立悬 架 , 气囊 下端 通 过支 架 总成 直接安 装在前桥 的正上 方 , 承受 全部 的前桥轴荷 , 上
—
16 1
15 3
29 5 1 88 8 8
O
— 一
—
36 6
1 7O
部通过 上盖板 与车架相连 接 , 图 1 如 所示 . V型推 力 杆 、 向推力杆 、 振器通 过橡胶衬 套分别 和车身 与 纵 减
首先 对建立 的整车 动力学模轮 毂 芯轴 ;一 纵 向推 力 杆 ;一空 气 弹 簧 ; 一 2 3 4 V 型 垫板 ;一 V 型 推 力杆 ;一 减 振 器 ; 转 向横 拉 杆 一 5 6 7 8 前 桥 ; 一 支架 总 成 ; 0 转 向节 ~ 9 1一
5 4 3 2 1
空 气 弹 簧 具 有 变 刚 度 弹 性 特 性 、 得 到 较 低 的 易
连接, 另一 端通过 万 向副 与另一侧 转 向节 连接 , 向 转 节通 过旋转 副与前 桥 连接 , 毂 芯轴 通 过旋 转 副与 轮 转 向节连接 , 轮毂芯 轴通过 固定 副与 车轮 连接 . l 表 为前悬架 主要 定位点 的坐标 .
真 实验 , 并进 行 评 价 计 分 . 究 结 果表 明 , 立详 细的 数 字化 功 能样 机 , 以有 效 地 分析 汽 车 的操 纵 稳 定性 . 研 建 可 关 键 词 : 车 ; AMS 空 气悬 架 ; 顺 性 ; 纵稳 定性 客 AD ; 平 操
分 类号 : 中 图) 6 ( U4 1 文献标志码 : A
前 桥连 接 , 向横 拉杆 一端通 过 球副 与一 侧转 向节 转
ADAMS-Vibration模块在悬置系统振动性能分析中的应用知识讲解
ADAMS/Vibration模块在悬置系统振动性能分析中的应用作者:Simwe 来源:MSC发布时间:2012-05-04 【收藏】【打印】复制连接【大中小】我来说两句:(2) 逛逛论坛一、动力总成悬置系统的建模1) 动力总成的主要参数a) 动力总成的质量b) 质心位置c) 动力总成的转动惯量、惯性积d) 发动机的参数,如发动机在怠速、最大扭矩、额定转速工况下的转速、输出扭矩等。
2) 悬置系统的主要参数a) 悬置点坐标b) 悬置刚度c) 阻尼d) 安装角度。
图1 动力总成质量特性参数输入图2 ADAMS动力总成悬置系统示意图根据动力总成和悬置系统的质量特性参数、几何特性参数、力学特性参数输入,在ADAMS/view中建立动力总成悬置系统虚拟样机模型。
二、动力总成悬置系统的分析评价悬置系统性能主要从系统的避频、解耦、限位、隔振率等几个方面考察。
分为时域、频域下激励信号输入分析。
1) 悬置系统固有频率分析在ADAMS/Vibration模块下对动力总成悬置系统进行振动模态分析。
图3 模态分析对话框经仿真分析得到动力总成刚体六阶模态固有频率,如下表所示。
表中第二列为系统无阻尼固有频率,它是把系统看作保守系统的前提下得到的,即系统没有阻尼;第三列为系统的阻尼比,也叫相对阻尼系数,即系统阻尼系数与临界阻尼的比值。
图4 模态分析固有频率分布表根据发动机隔振理论,发动机激振频率与系统固有频率之比大于√2,才能起到隔振的效果;不平路面的激励频率是客观存在,一般小于2.5HZ。
2) 悬置系统振动模态能量解耦分析能量解耦法是从能量的角度来解释发动机总成悬置系统的振动解耦。
如果发动机总成悬置系统作某个自由度的振动,而其他自由度是解耦的,那么系统的振动能量只集中在该自由度上。
从能量角度来说,耦合就是沿着某个广义坐标方向的力(力矩)所作的功,转化为系统沿多个广义坐标的动能和势能。
采用能量法解耦的依据是, 当系统在作某个方向的振动而和其它方向解耦时, 则能量只集中于该自由度方向上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Adams/car的悬架分析(Suspension Analyses),共提供悬架38种性能。
对所有悬架均提供:• Aligning Torque - Steer and Camber Compliance //单位回正力矩的转角或外倾角• Camber Angle //外倾角• Caster Angle //后倾角• Dive Braking/Lift Braking //制动点头/制动抬头• Fore-Aft Wheel Center Stiffness //悬架纵向刚度• Front-View Swing Arm Length and Angle //前视图(虚拟)摆臂长度和角度• Kingpin Inclination Angle //主销内倾角• Lateral Force - Deflection, Steer, and Camber Compliance //• Lift/Squat Acceleration //抬头(一般指启动时前悬架抬升,后悬架压缩)• Percent Anti-Dive Braking/Percent Anti-Lift Braking //(前悬架)防点头/(后悬架)防抬升• Percent Anti-Lift Acceleration/Percent Anti-Squat Acceleration //• Ride Rate //悬架动刚度• Ride Steer //悬架转向性能• Roll Camber Coefficient //侧倾轮倾系数(车身侧倾时车轮侧倾角与车身侧倾角的比值)• Roll Caster Coefficient //• Roll Center Locatio n //侧倾中心位置• Roll Steer //Ride steer is the slope of the steer angle versus the vertical wheel travel curve. Ride steer is the change in steer angle per unit of wheel center vertical deflection due to equal vertical forces at the wheel centers. Positive ride steer implies that the wheels steer to the right, as the wheel centers move upward.• Side-View Angle // The side-view angle is the wheel carrier side-view rotation angle. It is positive for a clockwise rotation, as seen from the left side of the vehicle.• Side-View Swing Arm Length and Angle // The swing arm is an imaginary arm extending from the wheel's side elevation instant center of rotation to the wheel center. For front suspensions, the sign convention is that when the instant center is behind the wheel center, the swing arm has a positive length. For rear suspensions, the sign convention is the opposite: when the instant center is ahead of the wheel center, the swing arm has a positive length. The angle of the swing arm is the angle it makes tothe horizontal. A positive angle for a positive length is when the arm slopes downward from the wheel center. A positive angle for a negative length arm is when the arm slopes upward from the wheel center.• Suspension Roll Rate //悬架侧倾刚度• Toe Angle //前束角• Total Roll Rate //总侧倾刚度• Wheel Rate //悬架刚度对转向悬架还提供:• Ackerman //Ackerman is the difference between the left and right wheel steer angles. A positive Ackerman indicates that the right wheel is being steered more to the right than to the left.• Ackerman Angle // Ackerman angle is the angle whose tangent is the wheel base divided by the turn radius. Ackerman angle is positive for right turns.• Ackerman Error // Ackerman error is the difference between the steer angle and the ideal steer angle for Ackerman geometry. Because Adams/Car uses the inside wheel to compute the turn center, the Ackerman error for the inside wheel is zero. For a left turn, the left wheel is the inside wheel and the right wheel is the outside wheel. Conversely, for a right turn, the right wheel is the inside wheel and the left wheel is the outside wheel. Positive Ackerman error indicates the actual steer angle is greater than the ideal steer angle or the actual is steered more to the right.• Caster Moment Arm (Mechanical Trail) // Caster moment arm is the distance from the intersection of the kingpin (steer) axis and the road plane to the tire contact patch measured along the intersection of the wheel plane and road plane. Caster moment arm is positive when the intersection of the kingpin axis and road plane is forward of the tire contact patch.• Ideal Steer Angle // Ideal steer angle is the steer angle in radians that gives Ackerman steer geometry or 100% Ackerman. For Ackerman steer geometry, the wheel-center axes for all four wheels pass through the turn center. Note that Adams/Car uses the steer angle of the inside wheel to determine the turn center for Ackerman geometry. Therefore, the ideal steer angle and the steer angle are equal for the inside wheel. When making a left turn, the left wheel is the inside wheel. Conversely, when making a right turn, the right wheel is the inside wheel. A positive steer angle indicates a steer to the right.• Outside Turn Diameter // Outside turn diamete r is the diameter of the circle defined by a vehicle's outside front tire when the vehicle turns at low speeds. Adams/Car determines the circle by the tire's contact patch for a given steer angle. For a left turn, the right frontwheel is the outside wheel. For a right turn, the left front wheel is the outside wheel.• Percent Ackerman // Percent Ackerman is the ratio of actual Ackerman to ideal Ackerman expressed as a percentage. Percent Ackerman is limited to the range from -999% to 999%. Percent Ackerman is positive when the inside wheel's steer angle is larger than the outside wheel's steer angle.• Scrub Radius // Scrub radius is the distance from the intersection of the kingpin (steer) axis and the road plane to the tire contact patch measured along the projection of the wheel-center axis into the road plane. Scrub radius is positive when the intersection of the kingpin axis and the road plane is inboard of the tire contact patch.• Steer Angle //Roll steer is the change in steer angle per unit chan ge in roll angle, or the slope of the steer-angle-verses-roll-angle curve. Roll steer is positive when for increasing roll angle (left wheel moving up, right wheel moving down) the steer angle increases (wheels steer toward the left).• Steer Axis Offset // The steer axis offset is the shortest distance from the steer (kingpin) axis to the wheel center. The steer axis offset is measured in the plane perpendicularto the steer axis and passing through the wheel center. The steer axis offset is always positive.The steer axis offset-longitudinal is the component of the steer axis offset along the intersection of the wheel plane with the plane perpendicular to the steer axis and passing through the wheel center. The steer axis offset-longitudinal is positive when the wheel center is forward of the steer axis.The steer axis offset-lateral is the component of the steer axis offset along the projection of the wheel-center axis into the plane perpendicular to the steer axis and passing through the wheel center. The steer axis offset - lateral is positive when the wheel center lies outboard of the steer axis.• Turn Radius //转向半径。