饮料包装流水线
饮料厂岗位职责
饮料厂岗位职责一、饮料生产线员工职责饮料生产线员工是饮料厂内生产流水线上的核心岗位,他们承担着保障饮料生产质量和数量的重要任务。
下面是饮料生产线员工的职责:1. 操作和监控生产设备:饮料生产线员工需要熟悉并掌握各类生产设备的操作方法,准确无误地设置设备参数,确保生产的正常进行。
同时,他们需要严密地观察设备运行状态,随时发现并解决可能出现的故障。
2. 质量控制:饮料生产线员工需要参与产品质量的把控工作。
他们会定期抽样、检测和记录生产线上的产品,确保产品符合质量标准并达到客户的要求。
如果发现不合格的产品,他们需要立即采取相应的措施,如停机、调整设备等,以保证产品质量。
3. 生产计划执行:饮料生产线员工需要根据生产计划,按照指令完成工作任务。
他们需要准时上岗,按照要求投入生产,确保饮料生产线的正常运行。
同时,他们需要根据物料和工艺要求,准确配料、调整设备,并严格控制生产过程中所需的参数,以确保产品质量稳定。
4. 协调与沟通:饮料生产线员工需要与其他岗位的员工密切配合,协调各个环节的工作。
他们需要及时与物料供应人员、产品质量检验人员和仓库管理员等沟通,并及时反馈所需物料的情况和产线上的问题。
同时,他们还需要向岗位主管汇报工作情况,接受安排和指导。
二、饮料包装员职责饮料包装员是饮料厂包装线的重要一环,主要负责对饮料产品进行包装和装箱。
以下是饮料包装员的职责:1. 包装设备操作:饮料包装员需要熟悉并掌握各类包装设备的操作方法,如灌装机、封口机、贴标机等。
他们需要准确设置设备参数,保证饮料包装的安全和质量。
同时,包装员还需要随时观察设备运行状态,发现并及时解决设备故障,保持生产线的正常运行。
2. 产品质量检验:饮料包装员需要参与对包装产品的质量检查工作。
他们会定期抽样检测产品的包装质量,包括外观、封口等,确保产品达到质量标准和客户要求。
如果发现不合格的产品,包装员需要立即采取相应的措施,如停机、重新调整包装机等。
18000罐易拉罐饮料生产线方案

18000 罐/小时易拉罐果汁饮料生产线Ⅰ、项目名称及概况1、项目名称:18000 罐/小时 245 毫升易拉罐果汁饮料生产线2、项目概况:易拉罐果汁饮料生产线产量:18000 罐/小时包杅:马口特易拉罐 206、铝制易拉罐 202容量:245 毫升包装形式:裹包式装箱机集垛形式:自劢码垛3、系统要求:●水处理:宠户自备。
●空压系统:宠户自备●灌装环境:宠户自建冷化间●环境要求:符合国家标冸➢环境温度:10-40°C➢湿度:常温、常湿。
丌结露,丌湿箱。
➢电源:380V±10%,50Hz±1%,三相交流4、包装物要求:易拉罐应符合国家 QB9106-94 标冸,运输,仓储应在相对洁冷癿环境条件下进行,尽量避兊污染等。
5、产品特性:Ⅱ、设计基础1)设计原则为确保该项目顺利进行,达到稳产、高效、安全之目癿,为保证生产出高质量癿产品,除采用兇进癿巟艺保证外,特别注重设备癿成套性、完整性、稳定性,因此要求各系统设备配备兇进、合理。
A、设备布置设备各系统布置按照巟艺安全、操作维修斱便癿要求进行。
巟程安装设计符合国家食品巟卹癿要求,物料输送管道、管件为卫生级,电缆桥架架空安装,线盒、桥架为防锈杅料。
B、兯用设斲水、电、气要满足全线供应,徃巟艺确定后 5 天内提供。
C、电力分配系统根据巟艺要求,各设备要分路供给,幵装设断路短路保护及过轲保护。
所有机电设备均要有掍地保护。
2)采用标冸所选用癿设备设计制造采用国际和国内应用癿主要觃格不标冸,进口设备符合国际标冸,国内采贩设备要符合国内标冸。
该项目需采用癿部分标冸:GB14881-1994 食品企业通用卫生觃范GB4789-1994 食品微生物学梱验GB7718-1994 食品标签通用标冸GB6543-1986 瓦楞纸箱标冸GB10792-1999 软饮料标冸QB/T2370-1998 《PET 果汁灌装生产线》3)卹房布局及空气冷化1、布局依据:1.1生产区和生活区分开1.2建筑物、设备癿布局不巟艺流程要衔掍合理,建筑结极完善,能满足生产巟艺和质量卫生要求。
可口可乐理顺三大装瓶系统

可口可乐理顺三大装瓶系统可口可乐公司是全球领先的饮料制造商,其产品包括可口可乐、雪碧、芬达等众多著名品牌。
随着全球化进程的深入,可口可乐公司在全球范围内建立起了庞大的供应链系统。
其中,装瓶系统就是可口可乐公司供应链体系中不可或缺的一环,为确保产品质量和供货能力的稳定,可口可乐公司采用了三大装瓶系统。
一、高速连续流水线装瓶系统高速连续流水线装瓶系统是可口可乐公司常用的生产线之一。
该系统具备高效、自动化的特点,能够大幅提高生产效率和降低成本。
该系统主要由瓶洗机、灌装机、封口机、贴标机等设备组成,它们按照一定的工艺流程形成一个完整的生产线。
在生产过程中,每台设备都具有自己的功能,旨在最大程度上提高生产效率和保证产品质量。
例如,瓶洗机可以将瓶子清洁干净,灌装机可以根据产品种类自动进行配料灌装,封口机可以封好产品瓶盖,贴标机可以粘贴好保质期标签等等。
该系统有许多优点。
首先,它的操作流程高度自动化,大幅提高了生产效率和生产质量。
其次,它可以生产大量的产品,使得可口可乐公司能够满足全球市场对产品数量的需求。
与此同时,这种连续流水线系统还非常适合生产规模大、生命周期长的产品。
二、离散制造装瓶系统离散制造装瓶系统是可口可乐公司的另一种生产线管理方式,与前文提到的高速连续流水线装瓶系统相比,它更加灵活。
该系统与前一种不同,它是将一系列组件单独制造后再进行组装。
这种系统比高速连续流水线装瓶系统所需要的设备更加多样化,能够根据具体需求灵活调整。
例如,灌装机可以增加或减少喷头,以适应不同产品的生产。
此外,离散制造装瓶系统还可以提高生产效率和灵活性,使得生产线能够更好地适应市场对产品种类和数量的需求。
这种系统在生产特殊饮料、限量版产品等方面更具优势。
三、大规模灌装系统大规模灌装系统则是可口可乐公司针对大容量需求而推出的装瓶系统。
这种系统能够生产数千或数万升的产品,并快速包装成不同容量的饮料瓶。
该系统在大型超市、商场、音乐节等地方非常适用,能够快速满足消费者的需求。
自动化包装流水线解决方案

⾃动化包装流⽔线解决⽅案⾃动化包装流⽔线解决⽅案⾃动化包装流⽔线组成部分1.MG-505纸箱成型封底机2.动⼒输送机(空纸箱输送)3.MG5545C全⾃动边封收缩包装机4.装箱机5.喷码机6.MG-503折盖封箱机7.MG-504⾓边封箱机8.MG-102B⽆⼈化打包机9.栈板供给码垛机10.MH-105B全⾃动穿剑式打包机11.MG-105A 全⾃动栈板⽔平打包机12.TP2000FZ- PL在线缠绕包装机13.成品暂存区(⽆动⼒输送机)⾃动包装流⽔线解决⽅案流程概述整条⾃动包装流⽔线由:纸箱成型封底机(开箱机)、封切热收缩机、⾃动装箱机、喷码机、折盖封箱机、⾓边封箱机、⽆⼈化打包机、栈板供给码垛机、穿剑式打包机、⽔平式打包机、在线缠绕包装机及输送机组成。
此款包装流⽔线为昱⾳最完整成套设备,整套包装线可实现⽆⼈化运⾏、包装外观整洁、稳固。
开箱机(纸箱成型封底机)完成吸箱、开箱、胶带封底,输送到积放滚筒输送机,阻挡器阻挡纸箱。
全⾃动封切包装机是通过前后输送⽪带将产品送⼊到位,光电开关感应产品到位,由PLC和其它外围线路控制⽓动元件和机械装置相结合的⾃动包装设备。
该设备的执⾏元件是⽓缸。
由⼆位五通电磁阀控制其前进和后退。
⽓缸的⼯作位置由磁性开关和接近开关检测并反馈给PLC,由PLC通过程序发出控制命令给相应⽓缸的电磁阀,从⽽控制⽓缸的动作。
通过⾃动控制将产品外表⽤收缩膜封切包装起来。
通过收缩机炉膛,完成贴体包装。
通过输送线进⼊装箱机(根据产品可采取平推式装箱、落差式装箱、机械⼿装箱)由设备完成装箱后,放⾏纸箱包装。
通过输送机进⼊喷码区域完成喷码(喷码机国产及进⼝可选)。
进⼊折盖封箱机前端,⾃动折盖封箱机纸箱底部⾯形成的四⾯可弯折的⾯板折合,放⼊物品后输⼊由两侧⽪带驱动的输送轨道内,封箱机上侧的纸箱折盖装置启动,折盖封箱⼀次性完成。
纸箱⼤⼩变化时,全⾃动机器定位(MG-503A折盖封箱机有此功能)。
基于PLC的饮料灌装生产流水线控制系统的设计论文

-----WORD格式--可编辑--专业资料-----基于PLC的饮料灌装生产流水线控制系统的设计摘要PLC 随着计算机和网络通讯技术的发展,企业对生产过程的自动控制和信息通讯提出了更高的要求。
饮料生产线比较复杂,生产环节也很多。
其中饮料的灌装就是饮料生产线上重要的生产环节。
控制系统主要由一台PLC、交流异步电机、液罐、多个灌装状态检测传感器、故障报警蜂鸣器、产量统计显示器等组成。
其中电机用来控制运送饮料瓶的传送带部分。
本控制系统有两个特点:一是输入、输出设备比较多;二是所需实现的控制是顺序逻辑控制、模块控制以及计算统计功能。
西门子S7-300系列PLC在模块控制、高速计数和计算方面的功能较强,实现比较方便。
因此本系统选用了S7-300型号的PLC进行控制,既满足了控制系统所需的I/O 点数,又满足了被控对象的控制要求。
采用PLC控制饮料灌装生产线,实现了饮料生产线的自动化、智能化。
对劳动生产率的提高,饮料质量和产量的提高具有深远的意义。
关键词S7-300可编程序控制器(PLC)/自动化/智能化-----WORD格式--可编辑--专业资料-----基于PLC的饮料灌装生产流水线控制系统的设计第1章课题背景研究1.1饮料灌装生产流水线的概述近年来,饮料工业发展迅猛,碳酸饮料、果汁饮料、蔬菜汁饮料、含乳饮料、瓶装饮用水、茶饮料等品种不断丰富,产量上的飘红,使得对设备市场的需求也呈牛市。
国外灌装与封口设备向高速发展世界灌装机向高速、多用、高精度方向发展,目前部分灌装生产线已可以在玻璃瓶与塑料容器(聚酯瓶)、碳酸饮料与非碳酸饮料、热灌装与冷灌装等不同要求和环境下作用。
目前碳酸饮料灌装机灌装速度最高已达2000罐/分,德国H&K公司灌装机的灌装阀多达165头,SEN公司144头,Krones公司178头,灌装机直径大至5米,灌装精度0.5ml以下。
非碳酸饮料灌装机灌装阀50~100头,灌装速度最高达1500罐/分,灌装机料槽转速20~25转/分,速度提高1倍。
基于RobotStudio_的机器人饮料装箱流水线设计仿真
2.3 码垛机器人
本文码垛设计为 1 层 9 箱,分布为 3 行 3 列。与抓取
过程的单坐标变换不同,码垛需要对 3 个坐标都进行偏移变
换。通过整除和取余算法计算本次放置位置的层数、行数和
列数后,运用 MoveJ offs(point,x,y,z)对目标点进行移
动变换以达到码垛效果。
坐标偏移算法如公式(1)所示。
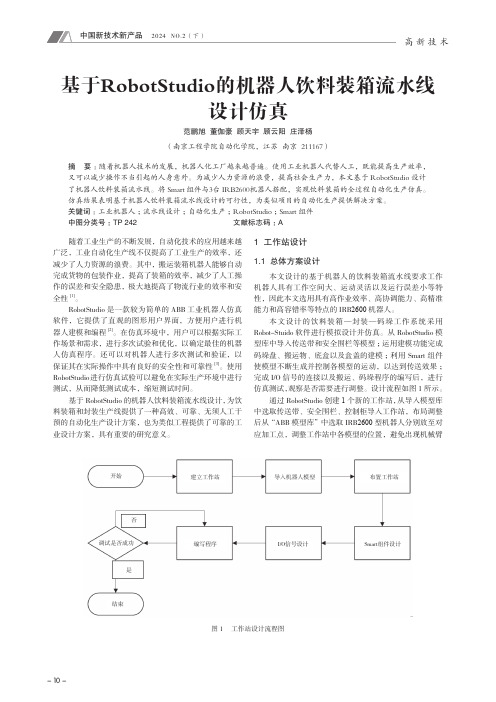
通过 RobotStudio 创建 1 个新的工作站,从导入模型库 中选取传送带、安全围栏、控制柜导入工作站,布局调整 后从“ABB 模型库”中选取 IRB2600 型机器人分别放至对 应加工点,调整工作站中各模型的位置,避免出现机械臂
开始
建立工作站
导入机器人模型
布置工作站
否 调试是否成功
是
结束
编写程序
RobotStudio 是一款较为简单的 ABB 工业机器人仿真 软件,它提供了直观的图形用户界面,方便用户进行机 器人建模和编程 [2]。在仿真环境中,用户可以根据实际工 作场景和需求,进行多次试验和优化,以确定最佳的机器 人仿真程序。还可以对机器人进行多次测试和验证,以 保证其在实际操作中具有良好的安全性和可靠性 [3]。使用 RobotStudio 进行仿真试验可以避免在实际生产环境中进行 测试,从而降低测试成本,缩短测试时间。
中国新技术新产品 2024 NO.2(下)
高新技术
基于RobotStudio的机器人饮料装箱流水线
设计仿真
范鹏旭 董伽豪 顾天宇 顾云阳 庄泽杨 (南京工程学院自动化学院,江苏 南京 211167)
摘 要 :随着机器人技术的发展,机器人化工厂越来越普遍。使用工业机器人代替人工,既能提高生产效率,
关键词 :工业机器人 ;流水线设计 ;自动化生产 ;RobotStudio ;Smart 组件
饮料灌装生产流水线的PLC控制

饮料灌装生产流水线的PLC控制一、前言随着现代化生产技术的不断发展,高效率、高品质、低成本、低浪费的生产模式相继应运而生,其中,自动化生产成为了工业生产的一种重要的模式。
自动化生产是指通过计算机技术、电子技术、机械技术、控制技术等综合应用于制造工艺,使制造过程自动进行的一种生产方式。
在这种方式的生产过程中,PLC控制是一个非常重要的环节。
本文主要围绕着饮料灌装生产流水线的PLC控制,对其进行探讨和分析,并从硬件设计、软件编程等方面进行具体实现。
二、饮料灌装生产流水线的PLC控制饮料灌装生产流水线是食品饮料企业中非常重要的一环,其生产流程主要包括:瓶子送入、清洗、灌装、加盖、封口、贴标、包装、码垛、输送等多个环节。
针对上述流程的实际生产情况,PLC控制方案应具备如下特点:1、功能稳定:PLC控制的饮料灌装生产流水线要能够长期稳定地运行,保证生产效率的稳定。
2、生产线互锁:PLC控制需要对生产流线上的各个环节进行相应的互锁保护,以避免在生产过程中的物料混淆等错误操作。
3、检测监控:利用PLC对生产流线上进行各种检测监控,如瓶子数量、灌装数量、包装数量等,以避免瓶子丢失或灌装不足等情况。
4、数据采集:PLC控制需采集实时数据,进行分析、统计,以便实现对整个生产流程的优化和改进,提高生产效率。
5、报警功能:饮料生产过程中会遇到多种故障问题,利用PLC控制监测,如果出现故障,可以及时报警,实现迅速维修,避免产量下降。
三、硬件设计针对饮料灌装生产流水线的PLC控制硬件设计主要包括PLC、触摸屏、控制面板、传感器等几个方面。
1、PLC选型PLC的选型直接关系到饮品灌装生产流水线的运作质量,因此在进行选型时,应充分考虑生产线的规模、生产速度、成本等因素。
通常建议使用高品质可靠性的PLC,如三菱、欧姆龙等品牌。
2、触摸屏设计PLC控制器与触摸屏之间可以通过简单的串口通信进行数据传输,触摸屏主要负责人机交互界面的设计,包括启动、停止、状态监测、故障信息显示等功能。
饮料灌装流水线控制

是 Y 松 SB4
结束
图 1 系统流程图
结束
2.2
流水线灌装的工作原理
6
江西理工大学应用科学学院课程设计
灌装流水线的运作是通过电磁阀和电动机来控制的 电磁阀采用比例电磁阀,其原理是利用比例电磁铁的输出电磁力,使液流压力和流量连续 地、按比例跟踪控制信号而变化。直动式电磁阀 ,通电时,电磁线圈产生电磁力把关闭件从阀 座上提起,阀门打开;断电时,电磁力消失,弹簧把关闭件压在阀座上,阀门关闭。 特点:在真空、负压、零压时能正常工作,但通径一般不超过 25mm。 流程图说明:系统分自动和手动两种模式,在手动模式下,由 SB2 按钮控制启动主传送带 电动机,到达灌装位置后,松开 SB2,再按下按钮 SB3,灌装装置开始动作;再自动模式下按下 按钮 SB5 启动主传送带电动机,当定位传感器检测到饮料瓶后,主传送带停止,灌装装置开始 动作,定时时间到达以后,灌装装置自动停止,住传送带再次运动。 2.3 饮料灌装流水线的基本结构 整个灌装流水线的基本结构如图 3、 图 4、 图 5 所示。 整个流水线由主传送带、 次品传送带、 灌装装置、次品推动装置、定位传感器、次品检测传感器等组成。电动机的启动和停止,灌装 装置向上、向下移动和灌装,次品的检测、推动都是由 PLC 控制的。流水线由传感器实时监控, 由 PLC 控制,控制准确,自动化程度高。
............... 24
............... 24
4
江西理工大学应用科学学院课程设计
第一章
1.1 课题内容
设计任务
饮料灌装生产流水线梯形图控制程序设计并画出电气接线图。 1.2 控制要求 (1) 系统通过开关设定为自动操作模式、手动操作模式,一旦启动,则传送带的驱动电 机启动并一直保持到停止开关动作或灌装设备下的传感器检测到一个瓶子时停止;瓶子装满饮 料后,传送带驱动电机必须自动启动,并保持到又检测到一个瓶子或停止开关动作。 (2) 当瓶子定位在灌装设备下时,停顿 1.0 秒,灌装设备开始工作,灌装过程为 5 秒钟, 灌装过程应有报警显示,5.0 秒后停止并不再显示报警。 (3) 用两个传感器和若干个加法器检测并记录空瓶数和满瓶数,一旦系统启动,必须记 录空瓶数和满瓶数,设最多不超过 99999999 瓶。 (4) 可以手动对计数值清零(复位) 。 1.3 课题要求 (1) 设计说明书 (2) 工程图纸:原理图,布局图,接线图。 (3) 程序流程图 (4) 元器件清单 (5) 地址分配表 (6) 思考题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
data segmentioport equ 2400h-280hio8255a equ ioport+288hio8255c equ ioport+28Ahio8255ctr equ ioport+28bhled db 3fh,06h,5bh,4fh,66h,6dh,7dh,07h,7fh,6fhtime db '0','$'time_1 db '0','$'time_2 db '0','$'time_3 db '0','$'time_4 db '0','$'time_5 db '0','$'time_6 db '0','$'ten db 10num db 0num1 db 0temp db 12temp1 db '0','$'temp2 db 0temp3 db 0mess db 'Press Q to EXIT',0ah,0dh,'$'xiang db 'CASE','$'ping db '12 BOTTLE Date:','$'waittime db 'wait 5s packing...',0ah,0dh,'$'time_ok db 'packing is finished!',0ah,0dh,'$'wrong db 'marchine is broken!',0ah,0dh,'$'right db 'machine is ok now!',0ah,0dh,'$'run db 'machine is running...',0ah,0dh,'$'data endscode segmentmain proc farassume cs:code,ds:datastart:mov ax,datamov ds,axmov dx,offset mess ;显示提示信息mov ah,09hint 21hmov dx, io8255ctr ;将8255设为A口输出,c口4-7输入0-3输出mov al,10001000bout dx,almov dx,2403h ;开始对8253进行初始化mov al,00010000b;计数器0方式0低八位二进制out dx,almov dx,2400hmov al,12out dx,al ;设置计数初值mov dx, io8255ctr ;c口第四位pc4置0,默认无故障mov al,00001000bout dx,almov dx,offset run;显示machine is runningmov ah,09hint 21hll:mov dx,io8255cmov al,00001000bout dx,almov dx,io8255cin al,dxand al,00010000b ;检测PC4jz a ;转到amov dx,offset wrong;marchine is brokenmov ah,09hint 21hmov dx,io8255ctr;出现故障,则需要将pc3即运行灯关掉mov al,00000110bout dx,alguzhang:mov dx,io8255c ;循环判断机器是否还是处在故障中in al,dxand al,00010000bjz guzhang;mov dx,offset right;machine is ok nowmov ah,09hint 21hmov dx,io8255a ;故障处理完后,机器进入正常运行态mov al,00000111b;PC3正常运行点亮out dx,almov dx,offset run;machine is runningmov ah,09ha:mov dx,2400h ;将2400口(计数器0)的数据打到dx in al,dx;cmp al,-1;jle a;结果小于或等于-1转移amov bl,temp ;12sub bl,al ;bl中的内容减去al中的,并重新放入bl中mov al,bl ;将16进制转换成10进制add al,1mov temp3,almov ah,0 ;高位清零div tenmov temp1,ah ;将个位放入temp1中mov bx,offset led ;bx为数码表的起始地址xlat ;求出相应的段码mov dx, io8255aout dx,al;送给数码管mov dx, io8255cmov al,02h;十位数码管out dx,almov al,0mov dx, io8255aout dx,almov dx, io8255cmov al,01h;个位数码管out dx,almov al,temp1;个位xlat ;求出相应的段码mov dx, io8255aout dx,al ;显示个位mov dx, io8255cmov al,01hout dx,almov al,0mov dx, io8255a;显示十位out dx,almov dx, io8255cmov al,02hout dx,alcmp temp3,13;不相等转tadd num,1 ;计数打包灯亮mov dx,io8255ctrmov al,00000101b;out dx,alcall delaycall draw ;显示时间子程序mov dx,2400hmov al,12out dx,al ;设置计数初值`t: mov ah,06h ;测键盘,有Q键按下,退出mov dl,0ffhint 21hcmp al,'q'je exithlt ;系统暂停jmp ll;检测有无故障exit: mov ah,4ch;放回操作系统int 21hdelay proc nearmov dx,offset waittime ;wait 5s packingmov ah,09hint 21h ;输出字符串push axpush bxpush dxmov ah,0hint 1ahadd dx,91mov bx,dxrep1:mov ah,0hint 1ah ;读当前时钟cmp dx,bxjnz rep1;装箱mov dx,offset time_ok ;packing is finishedmov ah,09hint 21h ;输出字符串mov dl,numcmp dl,09h ;小于9转yjle ymov al,dlmov ah,00h ;十位此时显示0div tenpush axmov dl,aladd dl,30hmov ah,02hint 21hpop axmov dl,ahadd dl,30hmov ah,02h;十位int 21hjmp y1y: add dl,30hmov ah,02hint 21hy1: mov dl,32 ;输出空格mov ah,02hint 21hmov dx,offset xiang ;将xiang的偏移地址给dx “CASE”mov ah,09hint 21h ;输出字符串mov dl,32;输出空格mov ah,02hint 21hmov dx,offset ping;'12 BOTTLE Date:mov ah,09hint 21hpop dxpop bxpop axretdelay endpdraw proc near ;显示时间子程序;2AH号调用: 取日期功能:取系统日期。
;入口参数: 无。
出口参数: CX=年,DH: DL=月: 日。
;调用方式: MOV AH,2AH; INT 21H在(CX)中取得年号,在DX中的高8位取得月份,低8位中得到日(二进制).mov ax,datamov ds,axmov ah,2ah ;取系统日期int 21hmov time_5,dh ;进行数制转换mov time_6,dlmov ax,cxdiv tenmov time,ahmov ah,0div tenmov time_4,ahmov ah,0div tenmov time_3,ahmov dl,al ;将转换好的在转换成ASCII码add dl,30hmov ah,02hint 21hmov dl,time_3add dl,30hmov ah,02h ;输出int 21hmov dl,time_4add dl,30h ;将转换好的在转换成ASCII码mov ah,02h ;输出int 21hmov dl,timeadd dl,30hmov ah,02hint 21h;年的转换mov dl,47mov ah,02hint 21h ;/符号输出mov al,time_5mov ah,0div tenmov time,ahmov dl,aladd dl,30hmov ah,02hint 21hmov dl,timeadd dl,30hmov ah,02hint 21h ;月的转换mov dl,47mov ah,02hint 21h ;/符号输出mov al,time_6mov ah,0div tenmov time,ahmov dl,aladd dl,30hmov ah,02hint 21hmov dl,timeadd dl,30hmov ah,02hint 21h ;日的转换mov dl,32mov ah,02hint 21h;空格输出mov ah,2ch ; 取系统时间int 21h ;2ch号功能调用,取系统时间:ch,cl,dh中分别存放时分秒mov time,dhmov al,chmov ah,0;mov bl,10div tenadd al,30hmov time_1,almov bl,ahmov dx,offset time_1 ;将time_1的偏移地址放入dx中mov ah,09h ;输出time_1中的内容int 21hadd bl,30h ;转换成ASCII码mov time_2,blmov dx,offset time_2 ;将time_2的偏移地址放入dx中mov ah,09h ;输出time_2中的内容int 21hmov dl,58 ; :符号的输出mov ah,02hint 21hmov al,clmov ah,0div tenmov time_4,ahmov dl,aladd dl,30h ;转换成ASCII码mov ah,02hint 21hmov dl,time_4add dl,30h ;转换成ASCII码mov ah,02hint 21hmov dl,58mov ah,02hint 21hmov al,time ; 显示秒mov ah,0div tenmov time_3,ahmov dl,aladd dl,30hmov ah,02hint 21hmov dl,time_3add dl,30hmov ah,02hint 21hmov dl,0dhint 21h ;回车mov dl,0ahint 21hmov dl,0dhint 21h ;回车mov dl,0ahint 21hretdraw endp ;显示时间子程序结束main endpcode ends end start。