任务17 红外测距系统设计与实现[15页]
红外线距离测量仪设计
毕业设计(论文)题目:红外线距离测量仪设计系(部):信息工程系专业:电气自动化班级:XXXXX学生:XXX学号:XXXXXXX指导教师:XXX 职称:讲师摘要红外线距离测量是针对当前公路、街道、停车场、车库等越来越拥挤,加上存在视觉盲区,无法看见车后的障碍物,司机在倒车时很容易刮伤汽车,甚至发生事故的情况而出现的一种旨在倒车防护的汽车防撞系统。
该系统能够在汽车以较低的速度进行倒车的过程中,识别出车后部的障碍物,并能够测量车与障碍物之间的距离,在车辆与障碍物发生碰撞前,发出声光报警,提醒司机刹车。
本设计从实验研究分析的角度,分析了红外线测距原理以及国内外此类汽车倒车存在的问题,提出了目前最简单、实用的一种红外线车辆倒车距离测量实现方案,即基于AT89C52单片机为核心的红外线测距倒车测量方案。
关键词:单片机;红外线;传感器;A/D转换作者:XXX指导老师:XXXABSTRACTInfrared vehicle astern distance measurement is in view of the current road, streets, parking lot, garage, etc more and more crowded, plus exist visual blind area, can't see the car after the obstacle, the driver in the reverse is easy to scratch the car, and even the case of an accident and the emergence of an aimed at astern protective car collision avoidance system. The system can in the car at a relatively low speed of reversing the process, a recognition of the obstacles, and can be used to measure the distance between the car and the obstacles in the vehicle and obstacles before collision, send out sound and light alarm to remind the driver brake. This design from the point of view of experiment study, this paper analyzes the principle of infrared ray range at home and abroad such reverse existent problem, put forward the most simple and practical a infrared vehicle astern distance measurement implementation scheme, that is based on AT89C51 single-chip microcomputer as the core of the infrared range astern measurement scheme.Keywords: SCM; Infrared; sensor;A/D ChangeAuthor:XXXGuiding Teacher: XXX目录第一章引言 (1)第二章硬件介绍 (2)2.1红外线概述红外线概述 (2)2.1.1红外线简介红外线简介 (2)2.1.2红外传感器的分类 (3)2.1.3红外传感器的应用 (5)2.2 AT89C52单片机的概述 (6)2.3 TLC1549简介 (9)第三章红外测距的工作原理与基本结构 (11)3.1红外测距发射与接收器件简介 (11)3.2红外线测距的工作原理 (12)3.3红外测距系统的基本结构 (12)第四章红外线测距的硬件设计 (15)4.1红外测距的实现构想 (15)4.2系统和硬件结构电路图 (15)4.3各硬件的电路设计 (16)第五章红外测距的软件设计 (18)5.1系统软件的结构框图 (18)误差分析 (19)总结 (20)致谢 (21)参考文献: (22)第一章引言随着汽车工业的发展,城市汽车数量迅速增加。
简易红外线遥控系统的设计与制作

简易红外线遥控系统的设计与制作一.实验目的通过对红外线遥控电路的实际设计与制作,进一步了解红外线数据传输的基本电路形式和实现方法。
掌握红外线遥控电路的测试与调整技能。
为以后从事生产和科研工作打下坚实的基础。
二.设计任务与要求(1)设计任务根据已知条件,完成对多路红外遥控系统的设计、装配与调试。
(2)设计要求(1)工作频率:38KHZ。
(2)调制方式:红外线。
(3)遥控对象:4个,被控设备用LED分别代替,LED发光表示工作。
(4)接收机距离发射机不小于2m。
(5)在一定发射功率下,尽量增大接收距离。
三.设计原理(1)整体原理图图1 红外线遥控电路组成框图(2)编码芯片PT2262IR发射芯片PT2262-IR将载波振荡器、编码器和发射单元集成于一身,使发射电路变得非常简洁。
PT2262-IR发射芯片地址编码输入有“1”、“0”和“开路”三种状态,数据输入有“1”和“0”两种状态。
由各地址、数据的不同接脚状态决定,编码从输出端Dout输出,通过红外发射管发射出去。
其编码时序波形如图2所示。
Dout输出的编码信号是调制在38kHz载波上的,OSC1、OSC2外接的电阻决定载频频率,一般电阻可在430k—470k之间选择即可。
PT2262管脚说明:A0-A111-8.10-13地址管脚,用于进行地址编码,可置为“0”,“1”,“f”(悬空),D0-D57-8.10-13数据输入端,有一个为“1”即有编码发出,内部下拉Vcc18电源正端(+)Vss9电源负端(-)TE14编码启动端,用于多数据的编码发射,低电平有效;OSC116振荡电阻输入端,与OSC2所接电阻决定振荡频率;OSC215振荡电阻振荡器输出端;Dout17编码输出端(正常时为低电平)在具体的应用中,外接振荡电阻可根据需要进行适当的调节,阻值越大振荡频率越慢,编码的宽度越大,发码一帧的时间越长。
(3)译码芯片PT2272接收芯片PT2272的数据输出位根据其后缀不同而不同,数据输出具有“暂存”和“锁存”两种方式,方便用户使用。
红外测距
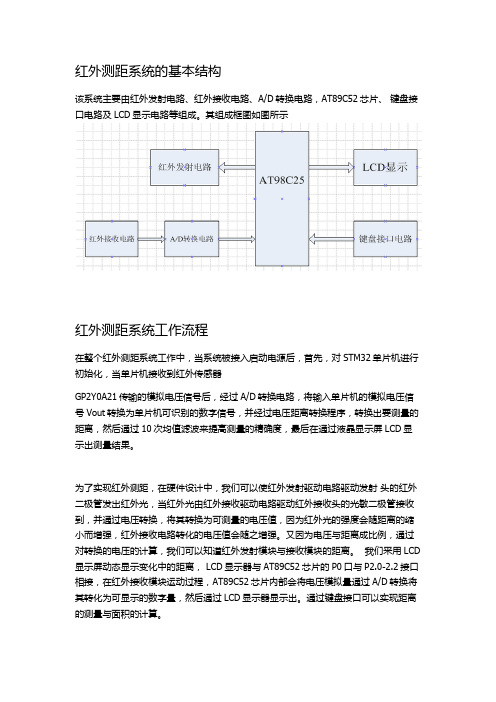
红外测距系统的基本结构该系统主要由红外发射电路、红外接收电路、A/D转换电路,AT89C52芯片、键盘接口电路及LCD显示电路等组成。
其组成框图如图所示红外测距系统工作流程在整个红外测距系统工作中,当系统被接入启动电源后,首先,对STM32单片机进行初始化,当单片机接收到红外传感器GP2Y0A21传输的模拟电压信号后,经过A/D转换电路,将输入单片机的模拟电压信号Vout转换为单片机可识别的数字信号,并经过电压距离转换程序,转换出要测量的距离,然后通过10次均值滤波来提高测量的精确度,最后在通过液晶显示屏LCD显示出测量结果。
为了实现红外测距,在硬件设计中,我们可以使红外发射驱动电路驱动发射头的红外二极管发出红外光,当红外光由红外接收驱动电路驱动红外接收头的光敏二极管接收到,并通过电压转换,将其转换为可测量的电压值,因为红外光的强度会随距离的缩小而增强,红外接收电路转化的电压值会随之增强。
又因为电压与距离成比例,通过对转换的电压的计算,我们可以知道红外发射模块与接收模块的距离。
我们采用LCD 显示屏动态显示变化中的距离, LCD显示器与AT89C52芯片的P0口与P2.0-2.2接口相接,在红外接收模块运动过程,AT89C52芯片内部会将电压模拟量通过A/D转换将其转化为可显示的数字量,然后通过LCD显示器显示出。
通过键盘接口可以实现距离的测量与面积的计算。
系统硬件结构电路图红外测距的硬件设计红外收发模块红外发送管是用于发送信号,经过障碍物将信号反射,红外接收管接收到反射回来的信号,然后根据信号强弱将对应的电压值显示在显示模块上,并将此时的距离记录下来。
然后整改程序,用红外收发模块进行测距,就可在显示模块上显示出红外接收管接收的信号强度对应的距离值。
如图所示GP2Y0A02YK0F有3个端口,其中VCC接信号输入,VO接MCP3001的IN+,GND接地线。
GP2Y0A02YK0F测量范围在20cm-150cm之间,测量误差小于0.5cm。
红外测距系统设计(光电系统设计)

word本科生课程论文论文题目红外光电测距系统设计课程名称光电系统设计学生某某谷幸东、郭晓龙、何志毅、胡健辉学号201211911309、10、11、12所在学院理学院所在班级电科1123班指导教师汤照目录第一章绪论11.1 红外线概述11.2 红外传感器的分类11.3 红外传感器的应用21.4 AT89C52单片机概述31.5 MCP3001简介6第二章红外测距的工作原理与基本结构82.1 红外测距传感器简介82.2 红外线测距的工作原理82.4红外测距传感器接线102.5 红外测距系统的基本结构10第三章红外测距的硬件设计113.1 红外测距的实现构想113.2 系统硬件结构电路图123.3 各硬件电路设计123.3.1 复位电路123.3.2 时钟电路133.3.3 A/D转换电路143.3.4 LCD显示电路14第四章红外测距的软件设计154.1 系统软件结构框图154.2 软件程序设计164.3 源代码16第五章仿真测试215.1系统的软件的调试仿真21第六章 PCB图及元器件清单226.1 PCB图236.2 元器件清单23第七章课程设计任务分工及个人心得体会247.1任务分工247.2 设计心得体会24第一章绪论1.1 红外线概述红外辐射俗称红外线,又称红外光,它是一种人眼看不见的光线。
但实际上它和其他任何光线一样,也是一种客观存在的物质。
任何物体,只要它的湿度高于绝对零度,就有红外线向周围空间辐射。
它的波长介于可见光和微波之间。
红外辐射的物理本质是热辐射。
物体的温度越高,辐射出来的红外线越多,红外辐射的能量就越强。
研究发现,太阳光谱各种单色光的热效应从紫色光到红色光是逐渐增大的,而且最大的热效应出现在红外辐射的频率X围内,因此人们又将红外辐射称为热辐射或热射线。
目前红外发射器件(红外发光二极管)发出的是峰值波长0.88uM~0.94uM之间的近红外光,红外接收器件(光敏二极管、光敏三极管)的受光峰值波长为0.88uM~0.94uM之间,恰好与红外发光二极管的光峰值波长相匹配。
《第17课 自动跟踪——红外传感器和碰撞传感器的综合应用》作业设计方案-初中信息技术清华大学版12九

《自动跟踪——红外传感器和碰撞传感器的综合应用》作业设计方案(第一课时)一、作业目标本次作业旨在帮助学生进一步理解和掌握红外传感器和碰撞传感器的工作原理及其在自动跟踪系统中的应用。
通过实际操作,培养学生的动手能力和解决问题的能力。
二、作业内容1. 制作一个简单的自动跟踪系统,要求能够根据障碍物的移动自动调整跟踪方向。
需要使用红外传感器和碰撞传感器来检测障碍物,并使用计算机编程来实现系统的控制。
2. 在制作过程中,学生需要自行设计和搭建系统框架,安装传感器,并编写相应的程序。
在程序编写过程中,学生需要理解传感器的工作原理,并能够根据实际情况进行编程。
3. 完成系统制作后,学生需要进行测试,确保系统能够正确地跟踪移动的障碍物,并记录测试结果。
三、作业要求1. 学生需独立完成作业,不得抄袭。
2. 作业中使用的所有材料和工具需自行准备,并确保安全。
3. 学生在完成作业的过程中,需要记录遇到的困难和解决方案,以便于教师了解学生的学习情况。
4. 作业完成后,需提交测试结果和遇到问题的总结报告。
四、作业评价1. 评价标准:根据学生提交的测试结果和问题总结报告,评价学生是否掌握了红外传感器和碰撞传感器的工作原理,以及是否能够正确应用这些传感器进行自动跟踪系统的设计。
2. 评价方式:教师对学生提交的作业进行批改,给出分数或评价意见。
同时,教师也可以通过学生的问题和解决方案了解学生的学习情况,给予针对性的指导。
五、作业反馈1. 学生:学生应根据教师的评价意见对作业进行修改和完善,并总结自己在完成作业过程中的收获和不足。
同时,学生还可以提出自己对课程或作业的建议和意见,以便于教师不断改进教学。
2. 教师:教师根据学生的反馈,对教学计划和内容进行适当调整,以满足学生的学习需求。
同时,教师还可以根据学生的问题和建议,改进教学方法和手段,提高教学效果。
通过本次作业,学生将能够进一步理解和掌握红外传感器和碰撞传感器的工作原理及其在自动跟踪系统中的应用,提高自己的动手能力和解决问题的能力。
红外测距【方案设计】
天津工业大学嵌入式系统设计报告【课程设计题目:红外测距】学院:电子与信息工程专业班级:电子Z1401姓名:赵旭学号:1310910418时间:一.课程设计简述课程设计目的:我们所进行的课题便是做一个简易的,精确的,近距离的距离检测仪,这也是对我们所学知识的一种考验方法,从中我们可以更系统的认识单片机,了解AD转换和红外收发模块。
内容:利用GP2Y0A21YK0F传感器作为测量组件,设计红外测距仪,具有下面的功能:1.测量范围为10cm~80cm;2.精度为1cm;3.串口显示模块;4.可以实时测量距离;意义:红外线测距仪指的就是激光红外线测距仪,红外测距仪----用调制的红外光进行精密测距的仪器,测程一般为1-5公里。
在100米以内则超声波测距更有优势,但是超声波测距的距离一般无法测量1米以内,而红外测距则可以测出这一段距离,而且有着不错的精度,在本课题中研究的就是这一类情况的红外线测距。
二.需求分析功能需求:利用GP2Y0A21YK0F传感器作为测量组件,设计红外红外测距仪,进行距离的测量。
1.通过红外测距仪可以进行实时测距。
2.可以实时将所测距离反馈到显示系统。
质量属性:1.测量范围为10cm~80cm;2.精度为1cm;设计约束:1.移植UC/OS-III操作系统,基于系统上跑程序,使用到任务间的通信机制。
2.使用自己独立画板制作的ARM/Cortex M3 最小系统板。
3.成本控制在100元以内。
4. 利用GP2Y0A21YK0F传感器作为测量组件。
三.总体方案设计系统框图:红外测距传感器功能框图:四.硬件设计硬件框图,器件选型,模块电路图五.软件设计软件框图,数据结构,模块流程图六.系统测试测试目的,测试步骤,测试结果,结果分析(务必附上实物图)七.附录扩展功能原理图,关键代码要求小四字体,1.25倍行间距。
红外测距课程设计数电
红外测距课程设计数电一、教学目标本课程旨在通过红外测距原理的学习,让学生掌握数字电路的基本知识和红外测距仪器的使用方法。
在知识目标上,要求学生了解红外线的基本特性,掌握红外测距的原理和计算方法,以及熟悉红外测距仪器的结构和操作流程。
在技能目标上,要求学生能够独立操作红外测距仪器,进行实际距离的测量和数据处理。
在情感态度价值观目标上,通过实践操作,培养学生的动手能力和团队协作精神,增强学生对科学技术的兴趣和热爱。
二、教学内容教学内容主要包括红外线的特性和应用、红外测距的原理、红外测距仪器的使用方法和操作技巧。
具体包括以下几个部分:1.红外线的基本概念和特性,红外线的产生和发射,红外线的探测和接收。
2.红外测距的原理,红外测距的数学模型,红外测距仪器的组成和工作原理。
3.红外测距仪器的使用方法,包括仪器的开机和关机,仪器的校准和调整,仪器的测量和数据读取。
4.红外测距的实际应用,包括红外测距在军事、航空航天、地质勘查等领域的应用案例。
三、教学方法为了激发学生的学习兴趣和主动性,本课程将采用多种教学方法相结合的方式进行教学。
包括:1.讲授法:通过讲解红外线的基本概念、红外测距的原理等理论知识,使学生掌握基本概念和原理。
2.实验法:通过实际操作红外测距仪器,让学生亲自体验红外测距的过程,提高学生的动手能力和实践能力。
3.案例分析法:通过分析实际应用案例,使学生了解红外测距在实际生活中的应用,提高学生的应用能力。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将准备以下教学资源:1.教材:《数字电路》教材,用于学习红外线的基本概念和红外测距的原理。
2.实验设备:红外测距仪器,用于实际操作和测量。
3.多媒体资料:包括红外线的产生和发射的实验视频,红外测距的实际应用案例视频等,用于辅助教学。
4.参考书:相关的科学研究论文和书籍,用于拓展学生的知识面。
五、教学评估本课程的教学评估将采用多元化方式进行,以全面、客观地评估学生的学习成果。
红外测距的基本结构及系统设计 红外测距的常用方法和原理是什么
红外测距的基本结构及系统设计红外测距的常用方法和原理是什么随着科学技术的不断发展,在测距领域也先后出现了激光测距、(微波)雷达测距、超声波测距及(红外)线测距等方式。
作为一种应用广泛、测量精度高的测量方式,红外测距利用红外线传播时不扩散、折射率小的特性,根据红外线从发射模块发出到被物体反射回来被接受模块接受所需要的时间,采用相应的测距公式来实现对物体距离的测量。
红外测距最早出现于上世纪60年代,是一种以红外线作为传输介质的测量方法。
红外测距的研究有着非比寻常的意义,其本身具有其他测距方式没有的特点,技术难度相对不大,系统构成成本较低、性能良好、使用方便、简单,对各行各业均有着不可或缺的贡献,因而其市场需求量更大,发展空间更广。
红外测距仪是指用调制的红外光进行精密的距离测量,测量范围一般为1-5公里。
红外线测距(传感器)有它的几个特点,远距离测量,在无反光板和反射率低的情况下能测量较远的距离;有同步输入端,可多个传感器同步测量;测量范围广,响应时间短;外形设计紧凑,易于安装,便于操作;所以它的应用价值比较高。
红外测距的常用方法和原理时间差法测距原理时间差法测距原理是将红外测距传感器的红外发射端发送(信号)与接收端接受信号的时间差t写入(单片机)中,通过光传播距离公式来计算出传播距离L。
式中c是光的传播速度为。
反射能量法测距原理反射能量法是由发射(控制电路)控制发光元件发出信号(通常为红外线)射向目标物体,经物体反射后传回系统的接收端,通过光电转换器接收的光能量大小进而计算出目标物体的距离L。
式中P为接收端接收到的能量,K为常数,其大小由发射系统输出功率、转换效率决定,d为被测目标漫反射率。
相位法测距原理相位测距法是利用无线电波段的频率,对红外激光束进行幅度调制并测定调制光往返一次所产生的相位延迟,再根据调制光的波长,换算出此相位延迟所代表的距离D,此方式测量精度非常之高,相对误差可以保持在百分之一以内,但要求被测目标必须能主动发出无线电波产生相应的相位值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
面向物联网的CC2530与传感器应用开发
任务17 红外测距系统设计与实现
目录 Contents
项目场景说明 距离传感器 Sharp红外传感器 项目实践
Education Solutions
Internet+
项目场景
பைடு நூலகம்
红外线测距仪指的就是激光红外线测距仪,红 外测距仪----用调制的红外光进行精密测距的 仪器,测程一般为1-5公里。在100米以内超 声波测距更有优势,但是超声波测距的距离一 般无法测量1米以内,而红外测距则可以测出 这一段距离,而且有着不错的精度。
“飞行时间法”(flying time)是通过发射特别短的并测量此光脉冲从 发射到被物体反射回来的时间,通过测时间间隔来计算与物体之间的距 离。
距离传感器根据其工作原理的不同可分为光学距离传感器、红外距离传 感器、超声波距离传感器等多种。
09:43 / 5
红外传感器测距原理
Sharp的红外传感器都是基于一个原 理,三角测量原理。
开始
定义状态变量 和数组
初始化系统时钟
初始化LED
初始传感器
距离赋值
距离不为0
是
否
串口缓存数据
串口缓存数据
串口打印信息
初始化串口
延时1s
09:43 / 12
项目实现
距离模块初始化
void stadiometry_init(void) { APCFG |= 0x10; P0SEL |= 0x10; P0DIR &= ~0x10; ADCCON3 = 0xB4; ADCCON1 |= 0x30; }
09:43 / 3
任务目标
某公司要生产一款红外测距设备,该设备使用GP2D12红外测距传 感器对1米以的距离的进行测量,测量到的数据通过串口上传到上位 机设备。
09:43 / 4
距离传感器
距离传感器,又叫做位移传感器,是传感器的一种,用于感应其与某物 体间的距离以完成预设的某种功能,目前以得到相当广泛的应用。
Sharp GP2D12的输出曲线图
图中,可以看到,当被探测物体的 距离小于10cm的时候,输出电压 急剧下降,也就是说从电压读数来 看,物体的距离应该是越来越远了。 但是实际上并不是这样的。
09:43 / 7
GP2D12产品参数
09:43 / 8
目录 Contents
项目场景说明 距离传感器 Sharp红外传感器 项目实践
项目思考
Sharp的红外传感器的测量原理? 红外测距传感器在生活中还有那些用途?
09:43 / 15
//模拟 I/O 使能 //端口0_4 功能选择外设功能 //设置输入模式 //选择AVDD5为参考电压;12分辨率;P0_4 ADC //选择ADC的启动模式为手动
09:43 / 13
项目实现
模块获取数据
float get_stadiometry_data(void){
unsigned int value;
ADCCON3 = 0xB4;
//选择AVDD5为参考电压;12分辨率;P0_4 ADC
ADCCON1 |= 0x30;
//选择ADC的启动模式为手动
ADCCON1 |= 0x40;
//启动AD转化
while(!(ADCCON1 & 0x80));
//等待ADC转化结束
value = ADCL >> 2;
红外发射器按照一定的角度发射红外 光束,当遇到物体以后,光束 会反射 回来,如图所示。反射回来的红外光 线被CCD检测器检测到以后,会获得 一个偏移值L,利用三角关系,在知道 了发射角度a,偏移距L,中心矩X,以 及滤镜的焦距f以后,传感器到物体的 距离D就可以通过几何关系计算出来 了。
09:43 / 6
value |= (ADCH << 6)>> 4;
//取得最终转化结果,存入value中
if((value >= 86)&&(value <= 750)){
return (2547.8/((float)value*0.75-10.41)-0.42); //获取距离
}else{return 0;}
}
09:43 / 14
Education Solutions
Internet+
项目分析
本项目通过距离传感器GP2D12获取传感器与阻挡物之间的距离, 并将采集到的距离值通过串口输出到上位机程序,1S更新一次。
CC2530
距离传感器
串口
09:43 / 10
项目硬件图
距离传感器原理图
09:43 / 11
距离传感器程序逻辑