集装箱堆场装卸设备E-RTG和RMG的比选
专业化集装箱码头E-RTG供电方式比较
专业化集装箱码头E-RTG供电方式比较梁浩;洪璇玲;麦宇雄;张瑞芬【摘要】对目前国内常用的几种E-RTG供电方式进行比较,分析其优缺点和适用范围,并结合广州港南沙港区三期工程的设计,比较不同E-RTG4供电方式的特点及经济性,提出了采用低空滑触线直流供电方式,为类似工程提供参考.【期刊名称】《水运工程》【年(卷),期】2014(000)002【总页数】5页(P86-90)【关键词】E-RTG;供电方式;集装箱码头【作者】梁浩;洪璇玲;麦宇雄;张瑞芬【作者单位】中交第四航务工程勘察设计院有限公司,广东广州510230;中交第四航务工程勘察设计院有限公司,广东广州510230;中交第四航务工程勘察设计院有限公司,广东广州510230;中交第四航务工程勘察设计院有限公司,广东广州510230【正文语种】中文【中图分类】TM631+.3近年来,随着世界经济贸易的一体化以及集装箱化的不断发展,国内集装箱港口吞吐量增长迅速。
目前,国内集装箱堆场广泛采用轮胎式龙门起重机(RTG)作业,为响应国家节能减排的政策,克服传统内燃驱动RTG产生的废气排放、高噪音、高营运成本等问题,各种采用市电驱动的电动轮胎式龙门起重机(E-RTG)应运而生。
E-RTG主要区别在于供电方式不同:按取电方式可分为电缆卷盘、低架滑触线和高架滑触线3种形式,按电流形式又有交流和直流两种[1]。
E-RTG供电方式的选择成为各集装箱码头需面临的问题。
本文分析各种E-RTG供电方式的现状,研究其优缺点和适用范围。
1 E-RTG供电方式1.1 按取电方式划分E-RTG根据市电取电方式的不同,划分为3种形式:电缆卷盘、低架滑触线、高架滑触线。
1)电缆卷盘形式。
电缆卷盘形式在RTG一侧安装电缆卷盘及相应的驱动装置,电缆缠绕在电缆卷盘上,电缆的一头通过切换开关并联到发电机供电主回路,另一头与地面市电供电接线箱相连。
当RTG行走时,电缆卷盘根据RTG与地面市电接线箱的距离沿电缆槽收放电缆,一般布置在盲道内,地面设置有电缆槽及接电箱。
2.集装箱码头主要装卸机械

A型集装箱装卸桥
朱玉华 yhzhu@
H型集装箱装卸桥(大多数码头采用)
朱玉华 yhzhu@
朱玉华 yhzhu@
朱玉华 yhzhu@
岸边装卸机械——集装箱装卸桥
吊具起升,进入下一步作业
朱玉华 yhzhu@
卸船顺序一般是从内档开始向外档,由上 到下一层一层卸船; 装船顺序相反,从外档开始向内档,由下 到上一层一层装船; 通常一个循环耗时约120秒左右。目前随着 集装箱码头专业化的发展,装卸桥的作业 效率,越来越被认定为码头管理水平高低 和竞争能力大小的重要标志之一。
朱玉华 yhzhu@
基 距
朱玉华 yhzhu@
集装箱装卸桥的基本作业步骤
船舶靠泊前,将大车行至安全位置
船舶靠泊后,将大车移至具体的作业舱位 移动小车,放下吊具 扭锁锁定,起升集装箱 小车向陆侧移动,放置集装箱
松开扭锁,吊具与集装箱分离
朱玉华 yhzhu@
场内半挂车
朱玉华 yhzhu@
挂车与牵引车连接方式
半拖挂方式
全拖挂方式
双联拖挂方式
朱玉华 yhzhu@
图2-11双联拖挂车方式
朱玉华 yhzhu@
A、半拖挂车方式 它是用牵引车直接同半挂车相连的连接方式。其特点是: 全长较短,回转半径小,倒车转向灵活;驱动力大;安 全可靠。目前在采用牵引车完成水平运输的码头,大多 采用半拖挂车方式。 B、全拖挂车方式 它是用牵引车直接同全挂车相连的连接方式。其特点是: 通过牵引杆架与挂车连接,箱重由挂车承担,牵引车本 身不承担箱重。全拖挂车是仅次于半拖挂车的一种常用 拖带方式,操作较半拖挂车略为困难。目前国内在上海 港外高桥一期码头部分水平运输是采用这种全拖挂车方 式。 C、双联拖挂方式 它是半拖挂方式后面在加上全挂车的连接方式。这种方 式在高速行驶时的摆动较大,操纵性能差,故目前的应 用不广。
高水水中转比例下的自动化集装箱码头堆场装卸工艺方案比较
高水水中转比例下的自动化集装箱码头堆场装卸工艺方案比较张立斌;李刚【摘要】近年来,集装箱自动化码头基本形成了典型的堆场装卸工艺方案,即堆场整体垂直码头布置,每个箱区配备2台自动化轨道式场桥(ARMG),分别负责装卸船和陆路外集卡装卸相关作业.但在高水水中转比例的码头,由于船侧装卸箱量高于陆路进出港箱量,该方案存在海陆侧ARMG作业不均衡而影响装卸船效率的缺点.通过分析该方案在高水水中转比例码头的不适应性,梳理国内外现有的解决方案,提出新的针对性方案.通过各方案的综合比较,提出解决思路,为类似自动化码头的设计提供参考.【期刊名称】《水运工程》【年(卷),期】2019(000)005【总页数】7页(P78-83,151)【关键词】自动化码头;水水中转;集装箱堆场;装卸工艺【作者】张立斌;李刚【作者单位】中交水运规划设计院有限公司, 北京100007;中交水运规划设计院有限公司, 北京100007【正文语种】中文【中图分类】U656.1+35自20世纪80年代中期起,欧洲和日本港口率先规划建设自动化集装箱码头。
自1993年世界第一个自动化码头在荷兰鹿特丹港的ECT码头投入运行以来,至今已建成30多个,主要集中在欧洲、美国、澳大利亚等地。
目前,主流的自动化集装箱码头基本形成了典型的装卸工艺,即堆场垂直码头布置,采用岸桥负责码头作业,自动导引运输车AGV(automated guided vehicle)或跨运穿梭车SHC(shuttle carrier)负责水平运输,箱区配备2台自动化轨道式场桥ARMG(automated rail-mounted gantry crane)分别负责堆场海、陆侧的作业[1]。
典型方案对常规的以本地箱为主的集装箱码头适应性较好,但对于水水中转比例较高的码头,其海侧装卸箱量高于陆侧进出港箱量,因此分别负责海、陆侧作业的ARMG作业出现了不均衡,最终影响装卸船效率,降低港口的服务质量。
集装箱码头堆场设备供电方案对比分析
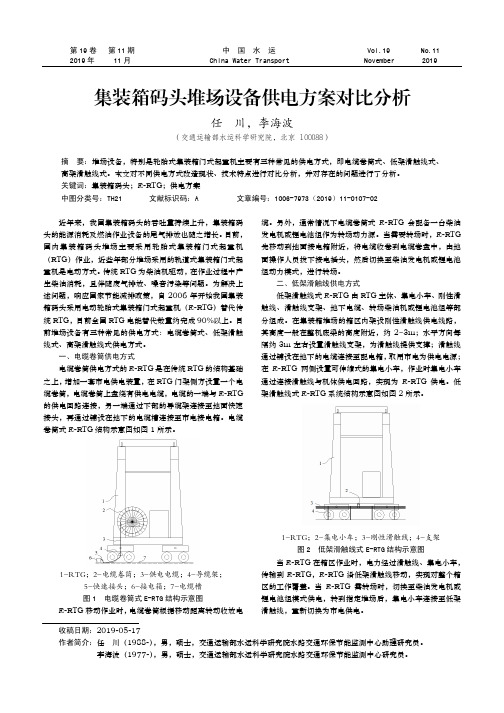
1-RTG;2-电缆卷筒;3-供电电缆;4-导缆架; 5-快速接头;6-接电箱;7-电缆槽 图 1 电缆卷筒式 E-RTG 结构示意图
E-RTG 移动作业时,电缆卷筒根据移动距离转动收放电
1-RTG;2-集电小车;3-刚性滑触线;4-支架 图 2 低架滑触线式 E-RTG 结构示意图
当 E-RTG 在箱区作业时,电力经过滑触线、集电小车, 传输到 E-RTG,E-RTG 沿低架滑触线移动,实现对整个箱 区的工作覆盖。当 E-RTG 需转场时,切换至柴油发电机或 锂电池组模式供电,转到指定堆场后,集电小车连接至低架 滑触线,重新切换为市电供电。
场地 占用
供电 效率
维护 工作
地面上方需架设多个支架,
地面需铺设电缆槽,且需预留
架设塔架数量较少,滑触线
且需预留安全距离,
安全距离,占用一定的场地
架在高空,占用场地少占用场Βιβλιοθήκη 多存在一定线损,供电效率中等
滑触线多采用铝材, 供电效率低
滑触线多采用铜材, 供电效率较高
电缆易磨损,寿命短, 维护工作量较大;
缆。另外,通常情况下电缆卷筒式 E-RTG 会配备一台柴油 发电机或锂电池组作为转场动力源。当需要转场时,E-RTG 先移动到地面接电箱附近,将电缆收卷到电缆卷盘中,由地 面操作人员拔下接电插头,然后切换至柴油发电机或锂电池 组动力模式,进行转场。
二、低架滑触线供电方式 低架滑触线式 E-RTG 由 RTG 主体、集电小车、刚性滑 触线、滑触线支架、地下电缆、转场柴油机或锂电池组等部 分组成。在集装箱堆场的箱区内架设刚性滑触线供电线路, 其高度一般在整机底梁的高度附近,约 2~3m;水平方向每 隔约 3m 左右设置滑触线支架,为滑触线提供支撑;滑触线 通过铺设在地下的电缆连接至配电箱,取用市电为供电电源; 在 E-RTG 两侧设置可伸缩式的集电小车,作业时集电小车 通过连接滑触线与机体供电回路,实现为 E-RTG 供电。低 架滑触线式 E-RTG 系统结构示意图如图 2 所示。
基于能量回馈的港口RTG节能低碳技术

基于能量回馈的港口RTG 节能低碳技术李益琴 孙建锐交通运输部水运科学研究院 北京 100088摘 要:为适应绿色港口的发展需要,各港口对RTG 等设备进行了节能减排技术改造。
本文针对港口RTG 的负载工作特性,研究了超级电容能量回馈系统应用于RTG 的充放电技术、容量匹配方法和双向DC/DC 控制技术等。
加装“超级电容”后,势能得以循环再利用,可有效降低RTG 的燃油消耗。
具有良好的节能减排效果。
关键词:港口RTG;能量回馈;节能低碳;超级电容中图分类号:U653.95 文献标识码:A 文章编号:1001-0785(2020)11-0035-04Abstract: To meet the needs of the development of green ports, energy-saving and emission-reduction technological transformationon RTG and other equipment have been carried out in various ports. Based on the load characteristics of port RTG, this paper studied the application of super capacitor energy feedback system in RTG charging and discharging technology, capacity matching method and bidirectional DC/DC control technology. With the addition of “super capacitor”, the potential energy is recycled, which can effectively reduce the fuel consumption of RTG and has good energy saving and emission reduction effects.Keywords: port RTG; energy feedback; energy saving and low carbon; super capacitor0 引言RTG (轮胎式集装箱门式起重机)广泛应用于港口集装箱堆场的装卸作业,相比于RMG (轨道式集装箱门式起重机)各有其优缺点。
轮胎吊大车定位的技术方案

■机器人技术ROBOTTECHNOLOGY轮胎出人乍足位的技术方案青岛海西重机有限责任公司陈鹏元摘要在当前世界智能码头建设这一趋势下,性能优良、质量可靠、自动化程度高的港机产品需求量日益增加,国内集装箱码头堆场大多采用轮胎起重机(RTG)和轨道起重机(RMG)装卸集装箱,RTG与RMG机型最大的区别就在于RTG的大车运行机构采用的是轮胎,而轮胎存在的气压等因素造成的不确定性给整机的精确定位增加了困难。
针对这种情况,分析多种大车定位的方案,对比目前采用的各种技术,总体对大车的定位方案进行探讨。
关键词RTG;轮胎;定位1前言自动化集装箱码头的运作模式,对系统规划、科学布局和高效安全提出了更高的要求,安全智能的设备及自动化系统的重要性与日俱增。
轮胎吊的运行较为灵活,可跨堆场进行作业,因此RTG在国内外各集装箱码头的使用率较大。
轮胎吊随着自动化码头的不断发展,也需进行一系列自动化改造,而改造最棘手的问题就是大车的定位。
由于轮胎吊本身的特点,多种定位技术无法使用,但对空间绝对位置的精确程度有较高要求。
结合目前使用的各种技术,采用BTG磁钉天线定位技术、Flag板定位技术、编码器多点校验控制、格雷母线定位技术(本来主要针对磁钉定位技术进行探讨),配合轮胎吊转场时的GPS定位技术,可有效解决轮胎吊定位困难、精度低的问题。
2技术要求RTG大车定位系统需保证大车自动定位功能的可靠性、稳定性、耐久性、大车运行的平稳性,满足全天候作业要求。
在合适位置加装适应使用现场户外条件的可实时采集大车机构实际所在位置的电子装置,且该装置采集的位置数据需精确到毫米。
大车定位系统向自动控制系统反馈RTG大车在堆场内的精确位置信息,并接收自动控制系统提供的作业任务指令信息的大车目标位置信息。
该系统应能实现自动控制,RTG接收到系统发送的作业任务指令信息后,大车自动运行到目标位置,并精确定位。
由于大车较大的重量和惯性,大车在到达目标位置前,应有"智能减速系统”保证大车精度和平稳性。
四卷筒轻型RMG及其在空箱堆场中的应用
四卷筒牵引式小车运行时受到的阻力主要有运 行摩擦阻力 Ff、运行坡度阻力 F a 和运行风阻力 Fw。 由于小车运行与起升共用一套机构, 故小车运行时 需满足如下条件:
F j = Ff + F a + Fw < 2Sm in 式中: Fj 为小 车空载 或满载 运行时 的运 行阻 力, Sm in为钢丝绳实际最小静拉力。所以吊具的设计 对于小车运行有很大影响。如果吊具重量不够, 空 载时钢丝绳静拉力有可能不足以克服运行阻力, 会 导致空载时小车无法运行。这对小车轨道的直线度 和光滑程度提出较高要求。特别是对于拼接轨道, 应当采取合理的工艺对轨道接头进行处理。另外, 因小车运行与起升机构共用一套驱动机构, 考虑各 机构额定功率下联动, 起升机构电动机除应维持起 升所需功率外, 还应增加小车运行所需的功率。 3. 2 主梁预拱度 四卷筒牵引小车的运行实际上是通过门架两侧 卷筒收放钢丝绳的不同组合形式来实现小车的水平 移动和吊重的升降, 故由上文分析可知, 主梁的设计 预拱度应该尽可能保证小车在运行中的各个位置时 运行坡阻力均最小, 如图 1所示。理论上, 为了消除 坡度阻力, 合理的预拱度曲线能使小车在任何位置 时, 主梁该点的实际倾斜角为 0, 但实际上, 主梁制 造完成后通过预拱度测量能满足要求, 但总装后由 于门腿变形累 加却又发生了变 化。对于不 同的吊
内河集装箱码头重箱堆场设备选型分析
内河集装箱码头重箱堆场设备选型分析作者:王冬冬来源:《城市建设理论研究》2014年第11期摘要:本文对内河集装箱码头重箱堆场设备选型进行了详细的分析和探讨,并提出了推荐方案。
关键词:轨道式集装箱龙门起重机电动轮胎式集装箱龙门起重机中图分类号:TH21文献标识码: A引言集装箱码头重箱堆场设备选型对整个集装箱码头的工艺流程起着举足轻重的作用,合理选择堆场装卸设备将直接影响到整个港区的经济效益。
传统的装卸工艺模式为岸桥+集装箱牵引半挂车+轮胎式集装箱起重机,近年来,随着集装箱运输的不断发展,堆场作业逐渐出现了正面吊、轨道式集装箱起重机、电动轮胎式集装箱起重机等其他方式。
本文结合内河集装箱码头重箱堆场设备选型分析论证,对某集装箱码头工程设备选型提出了推荐方案。
工艺方式详细比较内河集装箱码头重箱堆场装卸设备主要有集装箱叉车、集装箱正面吊、集装箱跨运车、轮胎式集装箱龙门起重机、轨道式集装箱龙门起重机等。
①集装箱叉车和正面吊方式集装箱叉车和正面吊运车机动灵活,调度方便,对场地要求低,造价低;但堆箱只有3~4层高,且作业通道占地面积大,堆场利用率低,维修费用多,不易实现自动化管理,一般用于10万TEU以下的港口。
②集装箱跨运车方式集装箱跨运车既能装卸又能搬运、机动灵活,岸边集装箱起重机和跨运车作业各自独立,互不影响,因而提高了岸边集装箱起重机的装卸效率。
集装箱跨运车的特点是设备单一,作业环节少,省掉了大量的水平运输拖挂车,设备投资少,但跨运车部件多、故障率较高,轮压大、堆箱2~3层高,占地面积大、污染较严重,对水平运距较长码头不经济。
③轮胎式集装箱龙门起重机(RTG)方式RTG具有机动灵活、装卸效率较高、倒箱率少、设计制造技术成熟、使用经验丰富、工作安全可靠,己趋向定型标准化,尤其是GPS全球定位系统在轮胎式集装箱龙门起重机上的应用,大大提高了对位准确性和装卸效率,机械投资较省,堆箱4~7层高,占地面积较小,基础处理费用较低,利于分期建设和发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
集装箱堆场装卸设备E-RTG和RMG的比选
摘要:本文对目前国内常用的重箱堆场装卸机械性能特点进行了初步的归纳与总结,为集装箱堆场装卸设备的选型提供参考。
关键词:装卸设备;电驱动轮胎式集装箱龙门起重机(E-RTG);轨道式集装箱龙门起重机(RMG)
Abstract: : this paper discusses the present domestic container loading and unloading of the commonly used loaded vans available on mechanical properties on the features of the preliminary summed up and summarized, container yard for loading and unloading equipment type selection of reference.
Keywords: loading and unloading equipment; Electric driven LunTaiShi container gantry crane (E-RTG); Rail type container gantry crane (RMG)
1 引言
随着全球石油价格的急剧攀升,降低油耗和运行成本对各集装箱码头来讲日益迫切。
因此我国目前新建专用集装箱码头堆场主要使用的装卸搬运设备主要是电驱动轮胎式集装箱门式起重机(E-RTG)和轨道式集装箱龙门起重机(RMG)。
这两种起重机功能相似,但在技术性能、装卸性能、操作性能、经济性能、自动化性能等方面存在一定差异。
本文将对电驱动轮胎式集装箱门式起重机(E-RTG)和轨道式集装箱龙门起重机(RMG)进行初步分析对比。
2 两种机械设备的主要结构特点
2.1电驱动轮胎式集装箱龙门起重机(E-RTG)
与内燃机驱动RTG相比,电驱动E-RTG具有节省能源成本、节省维护成本、改善操作环境、减少对工作区域环境污染的优点. 电驱动RTG根据市电电力上机方式的不同,主要有三种型式:电缆卷盘带拖缆型式ERTG、低空滑触线型式ERTG、高架滑触线型式ERTG。
其基本原理是:在集装箱堆场箱区边,架设刚性滑触线供电线路,电网电力通过滑触线和移动供电装置输送到RTG,移动供电装置随RTG同步移动,从而实现对RTG的移动供电。
当RTG需转场到另一箱区作业时,改由柴油发电机组或发电车供电,转场完毕后,由所在箱区的滑触线提供电力。
电驱动轮胎式集装箱门式起重机主要功能是进行集装箱拆码、装卸半挂车,因而在装卸船作业中必须有集装箱拖挂车配合做水平运输。
标准的轮胎吊其跨距
为23.47m ,跨内可堆放6列集装箱和1个集装箱牵引半挂车的通道,一般堆高5层、跨越4层集装箱,堆场利用率较高。
由于电驱动轮胎式集装箱龙门起重机具有一定得机动灵活性,可以横移,能由一个堆场区转移到其他各个堆场区。
该机在作业过程中,动作敏捷,实现装卸作业自动化管理比较容易,能适应各类集装箱码头堆场上装卸作业,尤其是大型集装箱码头堆场作业。
因此,该机在国内外港口被广泛采用。
2.2 轨道式集装箱龙门起重机(RMG)
轨道式集装箱龙门起重机,在堆场作业上具有与轮胎式集装箱龙门起重机共同的优势,作业效率高,具有较大的跨度和高度。
平均堆高可达4~6层,堆场利用率高。
用户可根据实际需要选择确定,最大的堆码垛高度和单机的跨度。
轨道式集装箱龙门起重机采用电力驱动,动力成本低,单机完好率较高,维修方便易行。
实现单机控制自动化比较简单。
存在的问题是:装卸作业机动性差,只能在有限范围内作业。
而宽度的大小、堆码层数的多少与装卸作业台时效率是成反比例关系的,因此,在通过能力一定得条件下,配备台数与单机跨度高度之间的优化是这种装卸工艺系统、工艺设计的关键问题。
该机比较适应于大中型集装箱码头的堆场作业,特别是在与其他装卸工艺系统相配合的大型集装箱码头专门堆放出口集装箱的堆场上的拆码垛作业更为适合。
3 两种机械设备装卸工艺的特点
3.1电驱动轮胎式集装箱龙门起重机(E-RTG)
利用电驱动轮胎式集装箱龙门起重机装卸工艺流程为:卸船时,集装箱装卸桥将船上卸下的集装箱装在拖挂车上,运至堆场,再用电驱动轮胎式集装箱龙门起重机进行卸车和码垛作业;装船时,在堆场由轮胎式集装箱龙门起重机将集装箱装上拖挂车,运往码头前沿,等待装卸桥装船。
该方案的特点是集装箱拖挂车只作水平运输,轮胎式集装箱龙门起重机担任堆拆垛作业,从而将集装箱拖挂车快速疏运和轮胎式集装箱龙门起重机堆码层数较多的特点结合起来,达到提高集装箱码头装卸效率的目的。
3.2 轨道式集装箱龙门起重机(RMG)
利用轨道式集装箱龙门起重机装卸工艺流程包括两种类型:一种是卸船时用集装箱装卸桥将集装箱从船上卸到码头前沿的集装箱拖挂车上,然后拖到堆场,采用轨道式集装箱龙门起重机进行堆码;装船时相反,在堆场上用轨道式集装箱
龙门起重机将集装箱装到集装箱拖挂车上,然后拖到码头前沿,用装卸桥把集装箱装船。
另一种则是在船与堆场之间不使用水平搬运机械,而是由集装箱装卸桥与轨道式集装箱龙门起重机直接转运。
轨道式集装箱龙门起重机将悬臂伸至集装箱装卸桥的内伸距的下方,接力式地将集装箱转送至堆场或进行铁路装卸。
4 两种机械设备的优缺点分析
对两种装卸设备的优缺点分析归纳成如下表格1:
表1装卸工艺方案堆场ERTG和RMG作业方式优缺点分析表
项目电缆卷筒ERTG方式RMG方式
优点1、作业时电力驱动,节约能源,环保条件较好。
2、设备相对机动灵活,转换动力后可从一个堆场转移到另一个堆场,有利于根据运量增长分期购置。
3、堆场不设轨道,堆场平整,车辆通行方便。
4、RTG有成熟的机型和丰富的制造及使用经验。
5、RTG产品已近标准化,造价较低。
6、对基础要求稍低,不需要对地基进行特殊处理,跑道投资较低。
1、电力驱动,节约能源,环保条件好。
2、RMG沿轨道行驶,定位能力较强,容易实现半自动化和全自动化操作,降低司机的劳动强度,装卸效率较高。
3、RMG维修保养费用较低。
缺点1、转场时内燃机驱动,能源为柴油,能源消耗、污染较RMG方式大。
2、对跑偏要求稍高,需增加措施避免ERTG跑偏撞到接电箱。
3、由于轮胎更换、柴油机大修等因素,其维护成本较高。
1、设备必须沿轨道运行,灵活性差,只能在一定范围内作业。
2、地面铺设轨道,对车辆通行和转弯有一定影响。
3、装机用电容量大,相应变电站规模较大,增加投资。
4、对轨道、地基要求较高,地基需经特殊处理才能满足要求。
5 结论
由此可见,无论E-RTG还是RMG目前都有着对方无法替代的优点,在一定的时间内它们都还将凭借各自的优势在适合自己的环境中得到继续发展。
因此在码头堆场或集装箱场站中选取集装箱装卸工具,需要从战略的角度出发,充分考虑到以下几个方面的因素:1、码头预期的吞吐量;2、码头的投资能力;3、堆场现状;4、各类装卸机械的配比;5、管理系统的先进性;6、经济效益和工作效率的评估。
参考文献:
[1] 顾海红.港口输送机械与集装箱机械【M】.北京:人民交通
[2] 王呜.轮胎式龙门起重机与轨道式龙门起重机的性能比较. 集装箱化,2011
[3] 邢小健. 轮胎式集装箱门式起重机“油改电”探讨. 港口装卸,2008.
注:文章内所有公式及图表请用PDF形式查看。