X-1飞行器
第二章_飞行器运动方程(1)

一个角运动 : 俯仰q
纵向两个线运动:高 航度 程HL
侧向两个角运动:滚 偏转 航pr 一个线运动 : 侧偏Y
坐标系选择
坐标系选择:选坐标系—机体系
飞机六自由度运动包括飞机绕三轴的转动(飞 机姿态变化),及飞机三个线位置的变化,在建 立六自由度方程时,选机体坐标系。
选体轴系下列好处:
2、线运动学方程式
线位置运动学方程 :地轴系与体轴系间线
速度关系:
让地轴系依次按 转动即可:
绕 oz 轴转 得到 x1 y1z g
x1 cos
y1
sin
z g 0
sin cos
0
0 x g
0
y
g
C
xg
y
g
1 z g
z g
2、线运动学方程式
再绕轴 oy1 转 得到 xy1 z2
飞行控制系统
第二章 飞行器运动方程 (一)
第二章 飞行器运动方程
刚体飞行器运动方程组 飞机的纵向运动 飞机的横侧向运动
2.1、飞行器运动方程组
一、建立飞机运动方程的基本假定 二、六自由度飞机运动方程 三、飞机运动方程的分组与线性化
一、建立飞机运动方程的基本假定:
认为飞机不仅是刚体,而且质量不变; 假定地球固定于空间,即略去地球自转、公转的
dV dt
1V
dV dt
V
dL dL dt 1H dt L
1、牵连运动
1V :沿 V 的单位向量; :动坐标系对惯性系的总角速度向量;
1L
:沿动量矩 :表示叉乘
L的单位向量;
v
是牵连加速度。
dV dH
dt 和 dt :表示在动坐标系内的相对导数。
X-51及高超声速飞行器简介

美国X-51A飞行器及总体设计及其关键技术简介Xxx摘要:从计划的背景、飞行器的构造、热防护材料研发测试以及实际飞行试验等方面对X-51A 的发展计划作了较为详细的介绍,并据此对美国发展高超声速飞行技术的研究流程和理念有个一定的了解与认识。
关键词:X-51A 高超声速导弹热防护系统结构材料飞行器引言:美国自二十世纪九十年代启动“全球敏捷打击”计划以来,一直处于低速发展过程中,该计划近期开始迅速升级,从改造“三叉戟”导弹开始,美国正推出一系列先进攻击武器概念,包括飞机、无人机和导弹。
其中,X-51高超声速巡航导弹是美国武器库目前速度最快的全球打击武器,可以在一小时内攻击地球上任一目标。
1项目概况巡航导弹在美国武器系统中具有特殊的地位,在未来信息化战争中,巡航导弹不要要成为首选的打击武器,也是美军实行远程军事打击的必备武器。
美国于20世纪90年代启动的“全球敏捷打击”计划自推出以来一直处于低速发展过程中,直至近年该计划开始迅速发展。
美国从改造三叉戟导弹开始,陆续推出一系列的先进攻击武器概念,包括新一代的飞机、无人机和导弹。
X-51A计划是由美国空军研究试验室(AFRL)、国防高级研究计划局(DARPA)、NASA、波音公司和普惠公司联合实施的旨在验证高超声速飞行能力的计划。
终极目标是发展一种马赫数达到5~7的可以在1 h内进行全球打击的武器,包括快速响应的空间飞行器和高超声速巡航导弹。
X-51A于2010年2月中旬进行了首次高超声速飞行试验。
X-51A的首飞创造了又一个人类历史记录———超燃冲压发动机推进的历时最长的高超声速飞行,刷新了X2 43创造的12 s的记录。
X2 51A首飞的成功意味着, 超燃冲压发动机将提供一种全新的快速全球打击能力。
据称,该高超声速导弹将能够在60 min内实施全球打击。
美国国防部/NASA的X2 51A项目则是这一新型武器系统方案的关键部分。
X2 51A 的飞行试验对于空间进入、侦察、打击、全球到达以及商业运输等都有重要意义。
地效飞行器发展综述

航空航天科学技术①作者简介:罗战虎(1982—),男,本科,副高级工程师,研究方向为浮空飞行器、地效飞行器等特种飞行器总体 设计技术。
DOI:10.16660/ki.1674-098X.2102-5640-4215地效飞行器发展综述①罗战虎(中国特种飞行器研究所 湖北荆门 448035)摘 要:本文介绍了地效飞行器的基本概念和原理,简述了地效飞行器国内外发展现状及各国学者、科研人员在地效飞行器各领域的研究进展;通过对已有地效飞行器型号的统计,对地效飞行器主要气动布局形式和特点进行总结和分类,分析了地效飞行器在军民用领域可能的用途、制约地效飞行器发展的主要因素等;并指出在当今社会,传统飞行器与船舶领域基本成熟的情况下,地效飞行器作为一款跨界产品,兼具飞机的高速性和船舶的经济性,其有望在今后一段时期进入快速发展期。
关键词:地效飞行器 布局 应用领域 关键技术 发展前景中图分类号:V271.9文献标识码:A 文章编号:1674-098X(2021)03(c)-0017-07A Review of the Development of Wing-In-Ground(WIG) AircraftLUO Zhanhu( China Special Vehicle Research Institute, Jingmen, Hubei Province, 448035 China)Abstract:This paper introduces the basic concept and principle of Wing-In-Ground(WIG) aircraft, brief ly describes the development status of WIG at China and other countries, and the research progress of scholars and researchers in various fields of WIG; through the statistics of existing WIG products, summarizes and classifies the main aerodynamic layout forms and characteristics of WIG aircraft, and analyzes the possible applications of WIG in military and civil fields. It also points out that in today's society, when the field of traditional aircraft and ship is basically mature, WIG, as a cross-border product, has both the high speed of aircraft and the economy of ship, and is expected to enter a period of rapid development in the future.Key Words: WIG craft; Layout; Application field; Key technology; Prospects for development飞机在起飞、降落和贴近地面飞行时,会出现一种附加升力,这种现象被称为“地面效应”(Ground Effect )。
空天飞行器的基本概念 -回复
空天飞行器的基本概念-回复【空天飞行器的基本概念】空天飞行器,作为一种新型的航空航天装备,是现代科技与工程技术深度融合的产物,它既具备航空飞行器在大气层内飞行的能力,又拥有航天器进入太空、在轨运行以及返回地球的技术特点。
空天飞行器的出现和发展,标志着人类对天空和太空探索能力的又一次飞跃。
一、空天飞行器的定义及分类空天飞行器(Aerospace Vehicle)是指能够在地球大气层内外自由往返飞行,并能执行多种任务的飞行器。
其涵盖了从起飞、升空、入轨、空间作业到再入大气层、着陆等一系列复杂的飞行阶段。
按照功能和任务的不同,空天飞行器大致可以分为以下几类:1. 空天飞机:以重复使用为主要特征,可在机场水平起降,通过自身动力直接飞向太空,完成任务后再返回地面,如美国的X-37B轨道试验飞行器和中国的神龙空天飞机等。
2. 卫星发射载具:这类空天飞行器主要用于将卫星送入预定轨道,例如SpaceX公司的“猎鹰9号”火箭就具有部分重复使用的设计理念。
3. 亚轨道飞行器:主要进行临近空间飞行,不进入地球轨道,但可以达到或超过一般商用客机飞行高度数倍,如维珍银河公司的太空船二号。
4. 太空探测器:这类空天飞行器通常用于深空探测任务,如火星车、月球探测器等,它们既能承受大气层外严酷环境,又能实现地月转移、行星际飞行等功能。
二、空天飞行器的关键技术空天飞行器的研发涉及众多高精尖技术领域,主要包括:1. 高超声速技术:空天飞行器需要在短时间内突破音障并达到高超声速,这就要求其具备高效的推进系统以及能够承受高速气动加热的耐热材料和结构设计。
2. 可重复使用技术:为降低太空探索成本,空天飞行器追求可重复使用,这包括了高性能发动机的回收利用、机体材料的耐久性设计以及飞行控制系统的精确制导等技术。
3. 热防护技术:空天飞行器在大气层内外穿梭时会面临极大的温度变化,因此必须采用高效的热防护系统,确保在高温环境下机体结构的安全。
4. 自主导航与控制系统:空天飞行器在复杂的空中和太空环境中需具备自主导航、定位和姿态控制能力,这对于飞行安全和任务成功至关重要。
世界主要空天飞行器研制情况及未来发展趋势
世界主要空天飞行器研制情况及未来发展趋势唐绍锋 张静 (中国运载火箭技术研究院)空天飞行器(Aerospace Vehicle)是航空航天飞行器的简称。
美国国家航空航天局(NASA)航空航天技术术语词典和麦格劳-希尔科学与技术术语词典对空天飞行器的解释为“在可感大气层内外都可以飞行的一类飞行器”,即既能航空又能航天的飞行器。
一般来说,将海拔100km高度的卡门线作为航空与航天的界线。
所以空天飞行器是指既可以在海拔100km以下又可以在海拔100km以上飞行的飞行器。
本文从商业和军事两方面阐述了空天飞行器的研究意义,介绍了空天飞行器研发所必须要突破的关键技术和世界代表性空天飞行器项目的研制情况,并对空天飞行器的未来发展趋势做出了预测。
1 研究意义商业意义发展空天飞行器可以大大降低空天之间的运输费用。
据估计,空天飞行器的运输费用至少可以降到航天飞机的1/5,甚至可降到1%,其实现途径归纳起来主要有三点:一是充分利用大气层中的氧,以减少飞行器携带的氧化剂,从而减轻起飞质量;二是整个飞行器全部重复使用,除消耗推进剂外不抛弃任何部件;三是水平起飞,水平降落,简化起飞(发射)和降落(返回)所需的场地设施和操作程序,不受发射窗口限制,减少维修费用和管理调度成本。
空天飞行器不仅可以向空间站等空间系统补充人员、物资、燃料,提供在轨服务,把空间站内制成Reviews的产品运回地球,还可以搭载乘客进行太空旅行,使人们观赏到旖旎的太空风光,为人们提供在地球上无法获得的体验。
基于空天飞行器的高速能力,乘坐它可以大大减少旅行时间,方便快捷地到世界的任何地方看望朋友或进行商业旅行。
此外,空天飞行器还可以对自然灾害进行快速响应。
军事意义在军事上,空天飞行器可以在大气层内外自由飞行,如果将它发展成一种全新的航空航天轰炸机、战斗机和运输机,其作战区域将是整个地球乃至近地空间。
它能在1~2h内突破任何地面防御系统,从空间对陆、海、空目标实施精确打击,即具备了全球快速打击能力。
X飞机
X 档案:从 X-1 到 X-50——美国X 系列试验飞行器简史作者:Planeboy原文载于《较量》11 期Part1 Part2 Part3Part4Part5第二部分:X-11------X-20X-11康维尔公司研制的X-11 是SM-65“阿特拉斯”洲际弹道导弹的前身,用以搜集后者研制过程中所必须的试验技术数据,是发展“阿特拉斯”导弹的关键试验设备。
“阿特拉斯”是美国部署的第一种洲际弹道导弹,其后续派生型号直到今天也还作为民用/军用空间探测发射运载工具使用。
发射中的X-11X-11 为康维尔公司两级火箭计划的首个产品,长度为29.26 米,直径为 3.66 米。
X-11 安装有一台北美XLR43-NA-5 火箭发动机,最大速度高达10.6 马赫。
总共制造了8 枚X-11,先后参与了“阿特拉斯”洲际弹道导弹和“水星”载人轨道飞行计划。
X-12与X-11 一样,X-12 的任务也是为“阿特拉斯”洲际弹道导弹的研制工作搜集试验飞行数据。
同时X-12 是康维尔公司两级火箭计划实施的第二个产品,用以全面掌握使用洲际弹道技术。
X-12 长度为31.40 米,直径为 3.65 米,其第一级安装有四台北美XLR-43-NA-5 火箭发动机,第二级则是一台,最大速度可达18 马赫。
X-12 先后制造过 5 枚,但和X-11 一样都在试验中消耗了,没有任何一枚能够保存下来。
X-12X-13瑞恩航空公司研制的X-13 是一种纯粹使用喷气发动机来完成垂直起降(VTOL)的试验型飞机,它使用一台罗罗公司的“埃文”RA.28-49 型涡轮喷气发动机,能够很容易的在垂直与水平飞行状态之间转换。
X-13 机长7.13 米,机高 4.60 米,翼展 6.40 米。
垂直起降技术现在看来已经不是什么新鲜事了,但在二十世纪五十年代中期却是相当前卫同时也是难度颇大的设计。
鉴于瑞恩航空公司为美国海军成功研制了喷气-螺旋桨混合式战斗机FR-1“火球”,美国空军于1954 年7 月决定让该公司开始研制垂直起降喷气式飞机X-13,后来海军和NACA 也进入其中。
4轴飞行器有x模式和+”模式两大类的区别

4轴飞行器有×模式和+”模式两大类的区别目录一、基本概念与外观特征 (1)1. X模式 (1)2. +模式 (2)二、飞行性能与操控性 (2)1. 飞行稳定性 (2)2. 操控性 (2)3. 飞行效率与续航 (3)三、应用场景与适应性 (3)1. 摄影与拍摄 (3)2. 竞技与表演 (3)3. 教育与科研 (3)4. 行业应用 (4)四、技术发展与未来趋势 (4)五、总结 (4)在无人机技术日新月异的今天,四轴飞行器以其稳定的飞行性能、灵活的操作性以及广泛的应用领域,成为了无人机市场中的佼佼者。
四轴飞行器,顾名思义,即通过四个旋翼提供升力并进行姿态控制的无人机。
在众多四轴飞行器的设计中,根据其电机(或旋翼)的布局方式,主要分为“X模式”和“+模式”两大类。
这两种模式不仅在外观上存在显著差异,更在飞行性能、操控性、稳定性以及应用场景等方面各有千秋。
本文将深入探讨四轴飞行器的“X模式”与“+模式”之间的区别,以期为读者提供全面而深入的理解。
一、基本概念与外观特征1. X模式X模式的四轴飞行器,其四个电机分别位于机体的四个顶点,形成类似字母“X”的布局。
这种布局下,对角线上的两个电机旋转方向相同,而相邻的两个电机旋转方向相反。
例如,左上角和右下角的电机顺时针旋转,而右上角和左下角的电机逆时针旋转。
这种设计使得飞行器在飞行过程中能够产生稳定的扭矩平衡,有效抵消了因电机旋转产生的陀螺效应,从而提高了飞行的稳定性。
2. +模式+模式的四轴飞行器,其电机布局则呈现出正方形的四个顶点上,但不同于X模式的是,它的电机排列更像是一个加号(+)的形状。
在这种模式下,所有四个电机均按照同一方向旋转(通常是顺时针),而为了保持飞行器的稳定,需要通过复杂的控制算法来不断调整电机的转速,以达到扭矩的平衡。
+模式的设计对飞行控制系统的要求更高,但同时也赋予了飞行器更加灵活和敏捷的飞行特性。
二、飞行性能与操控性1. 飞行稳定性•X模式:由于其对角线电机旋转方向的设置,X模式在静态悬停时具有天然的稳定性优势。
飞行器的“三障”之一“音障”
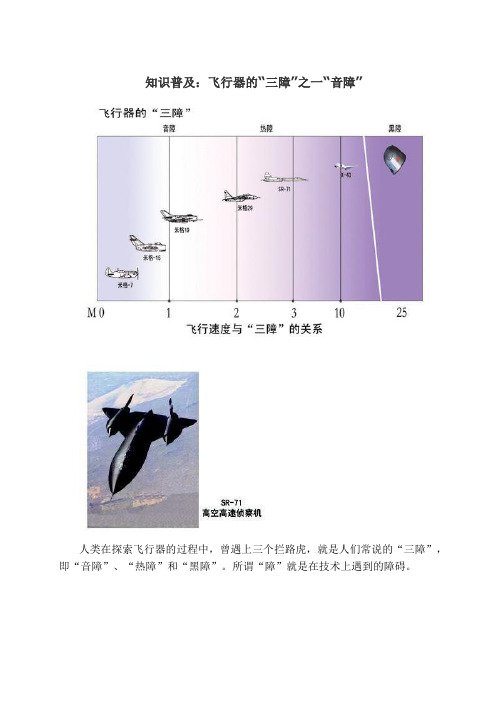
知识普及:飞行器的“三障”之一“音障”人类在探索飞行器的过程中,曾遇上三个拦路虎,就是人们常说的“三障”,即“音障”、“热障”和“黑障”。
所谓“障”就是在技术上遇到的障碍。
自美国人莱特兄弟1903年发明飞机以后,人们逐渐认识到航空技术将对人类的未来产生巨大影响。
因此,一些国家不惜投入大量人力物力,对航空技术进行探索和开发。
这期间有无数航空先驱者不惜牺牲自己的生命换来了一个又一个技术进步,使航空技术纪录一再打破,才形成了今天的航空技术水平。
在整个航空技术发展中,突破“音障”是一项重大的技术进步。
第二次世界大战期间,活塞式发动机、螺旋桨飞机的速度已经发展到顶峰。
但由于技术上的需要,还要把速度再提高,因为当时的空战主要是以机炮和机枪作为空战武器,谁的速度快,谁就能抢到有利空域赢得胜利。
所以当时的飞机设计师和飞行员一再努力追求飞行速度。
美国飞行员耶格尔驾驶时速700多千米的“野马”式战斗机与德国飞机作战时,还感到速度低,所以他经常采用先把战机拉高,然后俯冲,借助重力加速度提高飞机速度的战术与敌机作战。
可是当飞机出现800千米/时的速度时,飞机便产生了失控的感觉。
飞机震动得特别厉害,难以驾驭。
后来人们认识到,当飞机速度超过800千米/时,空气会产生一种“压缩效应”。
这种效应会使机头前部的空气被压缩成密度很高的“空气墙”,使飞机难以逾越。
产生这种现象时,飞机刚好接近于音速,后来人们管这种现象叫“音障”。
很多人试图突破“音障”,但当时受技术条件限制,都没能成功。
著名的英国飞行员德哈维兰在1946年9月27日驾驶D·11·108试验飞机作飞行试验。
当飞行速度达到0.815马赫时,由于飞机产生强烈震颤造成空中解体,付出了机毁人亡的代价。
虽然经过多次试图突破“音障”都没有成功,但通过实践人们认识到“音障”形成的原因,也初步设想出突破“音障”的方法。
直到1947年美国做了一架向“音障”冲刺的试验飞机—X-1飞机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毁,事后调查发现和 X-1-3 一样都是因为液氧油 箱中皮革垫圈引起的,所以随后 X-1B 和 X-2 机体 上的皮革垫圈全部被除去 X-1与B-29轰炸机
05
现状:
Part Five 意义及现状
意义: X-1计划的研究方法成为了之后研制“X”系列试验机的样板。1960年 代,NACA研制X-1的方法和人员帮助打下了美国太空计划的基础。X-1 计划将战后的美军与工业部门和研究部门联合了起来。X-1提供的数据 使美国在20世纪后半叶保持空中霸主的地位。
“X”系列试验机中的第一架
贝尔X-1
目录
01 背景资料
02 外形结构
03 性能参数 04 试飞经历 05 实现意义
01
Part one 背景资料
航空发动机技术突飞猛进
第二次世界大战后火箭发动机,喷气式发动机发展迅速,逐
渐取代活塞发动机。航空器的飞行速度越来越接近声速,急 需获取飞行器在突破声速时飞行数据。
02
Part Two 外形结构
动力系统:
发动机:Reaction Motors建造的4燃烧室引擎
燃料:乙烷基酒精与水和液氧的混合燃料(燃料和氧气槽通过氮和一个
蒸汽驱动涡轮泵加压)
推力:每个燃烧室能提供6700N的推力
液体火箭发动机
03
Part Three 性能参数
空载重量: 3,175 kg
满载重量: 5,545 kg 最பைடு நூலகம்起飞重量:5,557 kg
02
Part Two 结构外形
贝尔X-1:
角色:火箭飞机,试验用航空器 厂商:贝尔航空
首飞:1946.1.19
项目支持:美国陆军航空队、美国国家航空咨询委员会
试验目的:确定并最终展示可控制且能长时间飞行的飞机能否
突破音障
02
Part Two 结构外形
机身尺寸:
* 长度: 30 英尺 11 英寸(9.4 m) * 翼展: 28 英尺 (8.5 m) * 高度: 10 英尺 10 英寸(3.3 m) * 翼面积: 130 平方英尺(12 m2)
查克·叶格 驾驶编号46-062。 这架火箭飞机挂在一架改进 后的B-29机腹下升空,在空 中启动火箭发动机,然后滑 翔到地面。X-1第一次超音速 飞行,最高速度1.06马赫
Pinecastle空军基
地的一次滑翔中, Jack Woolams成
为了第一名XS-1的
飞行员
04
Part Four 试飞经历
02
Part Two 外形结构
机体外形:
“带机翼的子弹”,其外形接近于.50口 径勃朗宁机枪弹(该类弹药在超音速飞 行中的很稳定)
薄平直翼:
阻力小,升力小(薄机翼)。飞行速度到 达高亚声速和跨声速阶段,翼表面容易产 生激波(平直翼),X-2替换为后掠翼
全动尾翼:
将飞机的水平安定面和升降舵合为一, 它通过转轴与机身结合,飞行员可以控 制整个平尾偏转,这使得飞机的操纵性 能大大提高
46-062号现在华盛顿特区的国
家航空航天博物馆的飞行里程碑陈
列室展出。46-063号,即X-1E, 在NASADyden飞行研究中心总部
大楼前展示。46-064号,在1951
年11月9日的一次失火中被摧毁, 在此之前它只在1951年7月20日滑
翔过一次。
06
Part Six 视频资料
THANK YOU FOR WATCHING
最大速度: 1,541 km/h
续航: 5 分钟 升限: 21,900 m
机翼负荷: 463 kg/m2
推重比: 0.49
04
Part Four 试飞经历
1946年1月25日
1
1946年9月至1947年6月
2
1947年10月14日
3
在佛罗里达州的
Woolams牺牲后Goodlin 成为了贝尔公司X-1-1的首 席试飞员。在1946年9月至 1947年6月这段时间里,他 驾驶两架X-1进行了26次成 功的有动力飞行
最大速度:X-1 总共试验飞行了 157 次,最大
飞行速度达到 1.45 马赫,最大飞行高度 21,000 米。
后续型号:
X-1A 进行动力稳定试验,X-1B 进行空中载荷研 究,X-1C 搭载机炮进行武器测试(实体模型阶段 被取消),X-1D 则进行传热研究
事故:X-1D 和 X-1A 先后在试验过程中爆炸坠
声障—无形的墙
当飞机飞行速度接近音速时,周围的流动态会发生变化, 出现激波或其它效应,会使机身抖动、失控,甚至空中
解体,并且还可产生极大的阻力。
01
Part One 背景资料
1942 德国 Me262 870km/h
1940 美国 P-51 709km/h
1936 德国 BF109 686km/h 1936 英国 喷火式 602km/h 1940 日本 零式 571km/h