美化西门子标准报文1通信规约 10页
西门子工业网络通信课件精选

第1章绪论❖ 1.1 PLC控制网络的基本特点和通信功能❖ 1.2 数据通信❖ 1.3 工业局域网概述❖ 1.4 S7-300/400 PLC的通信网络概述1.1 PLC控制网络的基本特点和通信功能❖ 1.PLC控制网络的基本特点1)传输介质和链接组件标准化2)传输高可靠性3)良好的系统扩展性4)良好的覆盖面积5)较高的数据传输速率❖ 2.PLC的通信功能1)远程控制2)PLC局域网络系统3)PLC与上位机进行点对点通信1.2 数据通信❖具有一定的编码、格式和位长要求的数字信号成为数据信息。
❖数据通信是将数据信息通过适当的传送线路从一台机器传送到另一台机器。
❖数据通信系统的任务是把地理位置不同的计算机和PLC及其他数字设备连接起来,高效率地完成数据的传送、信息交换和通信处理三项任务。
❖数据通信系统组成传送设备传送控制设备传送协议通信软件1.2.1 数据传输方式的分类❖ 1.串行传输与并行传输1)串行传输数据在一个信道上按位顺序传输的方式。
特点:一或两根传输线远距离传输成本低速度慢2)并行传输数据在多个信道同时传输的方式。
特点:传输速度快传输线多,成本高2.频带传输与基带传输1)频带传输把信号调制到某一频带上的传输方式。
三种调制方式:调幅调频调相2)基带传输数据传输系统对信号不做任何调制,直接传输数据的传输方式。
PLC网络大多采用基带传输。
基带传输方式使整个频带范围都用来传输某一数字信号,常用于半双工通信。
频带传输时,在同一传输线路上可用频带分割的方法将频带划分为几个信道,同时传输多路信号,常用于全双工通信。
3.异步传输和同步传输1)异步传输异步传输也称为起止式传输,它是利用起止法来达到收发同步的。
在异步传输中,被传输的数据编码为一串脉冲,每一个传输的字符都有一个附加的起始位和多个停止位。
字节传输由起始位“0”开始,然后是被编码的字节。
通常低位在前,高位在后,接下来是校验位(可省略),最后是停止位“1”(可以是1位、1.5位或2位,用以表示字符的结束)。
siemensT103规约使用指南参考解析
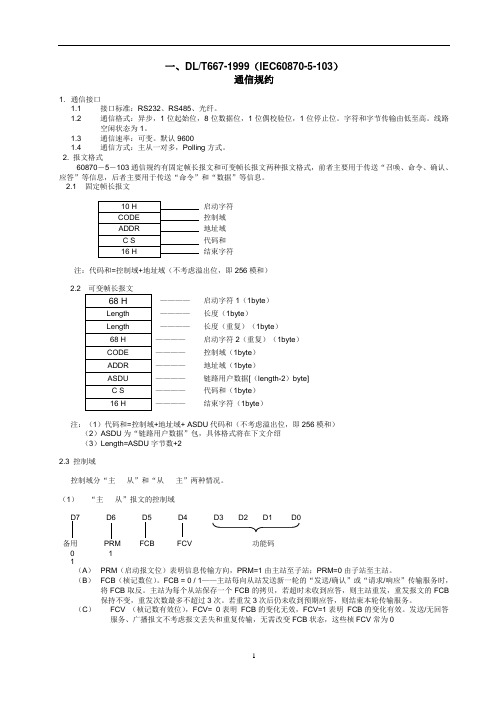
一、DL/T667-1999(IEC60870-5-103)通信规约1. 通信接口1.1 接口标准:RS232、RS485、光纤。
1.2 通信格式:异步,1位起始位,8位数据位,1位偶校验位,1位停止位。
字符和字节传输由低至高。
线路空闲状态为1。
1.3 通信速率:可变。
默认96001.4 通信方式:主从一对多,Polling方式。
2. 报文格式60870-5-103通信规约有固定帧长报文和可变帧长报文两种报文格式,前者主要用于传送“召唤、命令、确认、应答”等信息,后者主要用于传送“命令”和“数据”等信息。
2.1 固定帧长报文10 H 启动字符CODE 控制域ADDR 地址域C S 代码和16 H 结束字符注:代码和=控制域+地址域(不考虑溢出位,即256模和)2.268 H ————启动字符1(1byte)Length ————长度(1byte)Length ————长度(重复)(1byte)68 H ————启动字符2(重复)(1byte)CODE ————控制域(1byte)ADDR ————地址域(1byte)ASDU ————链路用户数据[(length-2)byte]C S————代码和(1byte)16 H ————结束字符(1byte)注:(1)代码和=控制域+地址域+ ASDU代码和(不考虑溢出位,即256模和)(2)ASDU为“链路用户数据”包,具体格式将在下文介绍(3)Length=ASDU字节数+22.3 控制域控制域分“主从”和“从主”两种情况。
(1)“主从”报文的控制域D7 D6 D5 D4 D3 D2 D1 D0备用PRM FCB FCV 功能码0 11(A)PRM(启动报文位)表明信息传输方向,PRM=1由主站至子站;PRM=0由子站至主站。
(B)FCB(桢记数位)。
FCB = 0 / 1——主站每向从站发送新一轮的“发送/确认”或“请求/响应”传输服务时,将FCB取反。
S7-200USS通信报文传输格式和管理
比 PKW 好。
13
概述
➢ 定义 ➢ USS 通信报文传输格式 ➢ USS_INIT 指令 ➢ USS_CTRL 指令 ➢ USS 读/写参数指令 ➢ MM 440 变频器的参数设置
14 14
USS_INIT 指令
的数据都包括在每条报文的净数据区域内。
10
USS 通信报文传输格式
• 净数据区由 PKW 区和 PZD 区组成:
• 以上每小格代表一个字(两个字节),含义如下:
– PKW: 此区域用于读写参数值、参数定义或参数描述文本,并可修改和报 告参数的改变 。其中:
– PKE: 参数 ID。包括代表主站指令和从站响应的信息,以及参数号等 – IND: 参数索引,主要用于与 PKE 配合定位参数 – PWEm:参数值数据
03 的位单元格中填入二进制“1”。其他不需要激活的地址 对应的位
设置为”0“。取整数,计算出的 Active 值为 00000008 h,即
16#00000008,也等于十进制数 8。
17
概述
➢ 定义 ➢ USS 通信报文传输格式 ➢ USS_INIT 指令 ➢ USS_CTRL 指令 ➢ USS 读/写参数指令 ➢ MM 440 变频器的参数设置
115200 bit/s。 • d. Active:此参数决定网络上的哪些USS从站在通信中有效。 • e. Done: 初始化完成标志。 • f. Error: 初始化错误代码。
16
USS_INIT 指令
• USS_INIT 子程序的 Active 参数用来表示网络上哪些 USS 从站要被 主站访问,即在主站的轮询表中激活。网络上作为 USS 从站的驱动 装置每个都有不同的 USS 协议地址,主站要访问的驱动装置,其地 址必须在主站的轮询表中激活。 USS_INIT 指令只用一个 32 位长的 双字来映射 USS 从站有效地址表,Active 的无符号整数值就是它在 指令输入端的取值。
许继iec61850-9-2(le版)通信规约

用于 80 点采样率的采样值的传送。
用于 256 点采样率的采样值的传送。 对应于 TCTR 和 TVTR 中的 HzRtg 数据属性。
3.5 IED 一个 MU 是一个 LD。允许一个 IED 中存在多个 MU(LD)。气
时钟源: 典型的时钟源的 1PPS 产生于 GPS 接收器。它具备±1μs 的精度。
同步运行:
第 4页
许继电气
许继 IEC61850-9-2(LE 版)通信规约
MU 与 Global 1PPS 同步时,SV 报文中的 SmpSynch 属性赋成 2。MU 与 Local 1PPS 同步时,SV 报文中的 SmpSynch 属性赋成 1。
FALSE FALSE
注解
配置,采用 9-2 中的推荐值: 01-0C-CD-04-xx-xx
3.3 运行和对时约定 3.3.1 运行模式 Mod
支持如下属性: ON:正常运行状态,此时 MU 激活,发送数据。 TEST:测试状态,MU 发送数据,数据的 q 属性“test”标志置 TRUE。 OFF:复位状态,MU 不发数据。
非同步运行: MU 收不到同步脉冲信号,SV 报文中的 SmpSynch 属性赋成 0。
3.3.3 派生数据 如果采样数据不是采集实际的测量量,而是通过计算派生的,则对应 SAV
的 q 属性中的 derived 标志应置为 TRUE。
3.4 MU 的配置
表 7:需要配置的 MU 的参数
参数名
值域
LDName
注解
DataSet 定义固定不变
第 3页
许继电气
许继 IEC61850-9-2(LE 版)通信规约
西门子smart200通讯说明文档
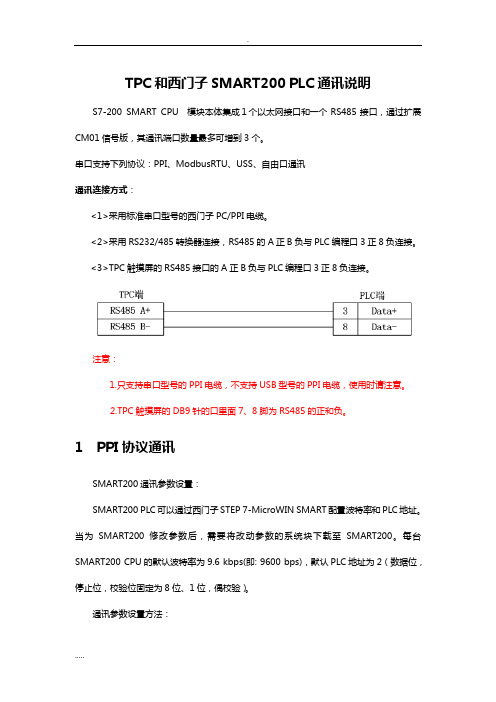
TPC和西门子SMART200 PLC通讯说明S7-200 SMART CPU 模块本体集成1个以太网接口和一个RS485接口,通过扩展CM01信号版,其通讯端口数量最多可增到3个。
串口支持下列协议:PPI、ModbusRTU、USS、自由口通讯通讯连接方式:<1>采用标准串口型号的西门子PC/PPI电缆。
<2>采用RS232/485转换器连接,RS485的A正B负与PLC编程口3正8负连接。
<3>TPC触摸屏的RS485接口的A正B负与PLC编程口3正8负连接。
注意:1.只支持串口型号的PPI电缆,不支持USB型号的PPI电缆,使用时请注意。
2.TPC触摸屏的DB9针的口里面7、8脚为RS485的正和负。
1 PPI协议通讯SMART200通讯参数设置:SMART200 PLC可以通过西门子STEP 7-MicroWIN SMART配置波特率和PLC地址。
当为SMART200修改参数后,需要将改动参数的系统块下载至SMART200。
每台SMART200 CPU的默认波特率为9.6 kbps(即: 9600 bps),默认PLC地址为2(数据位,停止位,校验位固定为8位、1位,偶校验)。
通讯参数设置方法:1、将电脑本地网卡的IP 设置和PLC的IP在同一个网段内,PLC默认IP为192.168.2.12、通过网线连接好电脑和PLC连接好,运行西门子STEP 7-MicroWIN SMART软件,双击通讯,更新可访问的设备,找到所连接PLC的IP,选择后点击确认。
3、双击系统块,打开通讯部分,设置RS485端口的通讯参数,设置地址和波特率,默认波特率为9.6 kbps(即: 9600 bps),默认PLC地址为2。
4、MCGS添加西门子PPI驱动,通用串口父设备使用默认参数设置,如下图“西门子_S7200PPI”子设备参数设置如下:设备地址:PLC设备地址,可设定范围1-31,默认值为2。
IEC104规约报文说明

ModBus通讯规约(印刷)三明无线电八厂温控
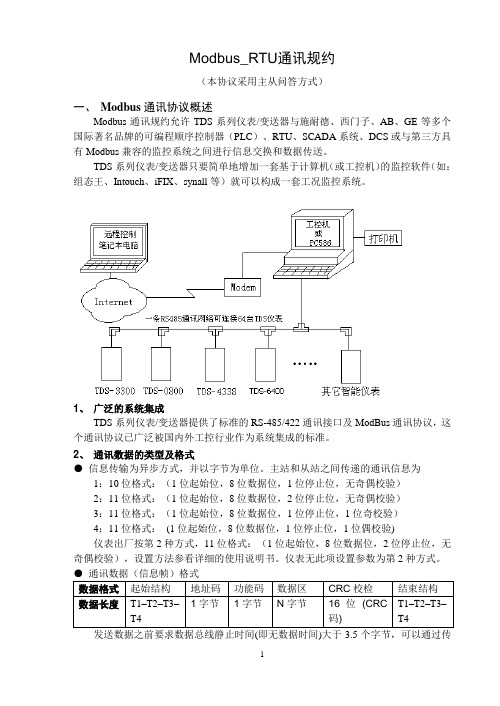
Modbus_RTU通讯规约(本协议采用主从问答方式)一、Modbus通讯协议概述Modbus通讯规约允许TDS系列仪表/变送器与施耐德、西门子、AB、GE等多个国际著名品牌的可编程顺序控制器(PLC)、RTU、SCADA系统、DCS或与第三方具有Modbus兼容的监控系统之间进行信息交换和数据传送。
TDS系列仪表/变送器只要简单地增加一套基于计算机(或工控机)的监控软件(如:组态王、Intouch、iFIX、synall等)就可以构成一套工况监控系统。
1、广泛的系统集成TDS系列仪表/变送器提供了标准的RS-485/422通讯接口及ModBus通讯协议,这个通讯协议已广泛被国内外工控行业作为系统集成的标准。
2、通讯数据的类型及格式●信息传输为异步方式,并以字节为单位。
主站和从站之间传递的通讯信息为1:10位格式:(1位起始位,8位数据位,1位停止位,无奇偶校验)2:11位格式:(1位起始位,8位数据位,2位停止位,无奇偶校验)3:11位格式:(1位起始位,8位数据位,1位停止位,1位奇校验)4:11位格式:(1位起始位,8位数据位,1位停止位,1位偶校验)仪表出厂按第2种方式,11位格式:(1位起始位,8位数据位,2位停止位,无奇偶校验),设置方法参看详细的使用说明书。
仪表无此项设置参数为第2种方式。
●通讯数据(信息帧)格式输波特率计算(9600bps约为5ms),信息帧中表示为起始结构(T1–T2–T3–T4),T1、T2、T3、T4分别代表一个字节的静止时间。
当最后一个字节传输完,数据总线静止时间(即无数据时间)还需大于3.5个字节后,才可以开始发送新的数据,信息帧中表示为停止结构(T1–T2–T3–T4)。
一条完整的信息帧必须是连续的信息流,字节间的间隔时间小于1.5个字节。
TDS系列仪表/变送器收到完整的信息帧后延时250ms左右将数据连续送出,当收到本机地址码、正确的功能码后,但无法接收全后面的完整数据信息帧则在2秒左右后回复初始接收状态。
IEC104规约报文说明(104报文解释的比较好的文本)
IEC104规约报文说明(104报文解释的比较好的文本)IEC104规约调试小结调试广西中调IEC-104规约时对报文作了如下的分析,不对地方请指正。
一、四遥信息体基地址范围“可设置104调度规约”有1997年和2002年两个版本,在流程上没有什么变化,02版只是在97版上扩展了遥测、遥信等信息体基体址,区别如下:三、以公共地址字节数=2,传输原因字节数=2,信息体地址字节数=3为例对一些基本的报文分析第一步:首次握手(U帧)发送→激活传输启动:68(启动符)04(长度)07(控制域)00 00 00接收→确认激活传输启动:68(启动符)04(长度)0B(控制域)00 00 00第二步:总召唤(I帧)召唤YC、YX(可变长I帧)初始化后定时发送总召唤,每次总召唤的间隔时间一般设为15分钟召唤一次,不同的主站系统设置不同。
发送→总召唤:68(启动符)0E(长度)00 00(发送序号)00 00(接收序号)64(类型标示)01(可变结构限定词)06 00(传输原因)01 00(公共地址即RTU地址)00 00 00(信息体地址)14(区分是总召唤还是分组召唤,02年修改后的规约中没有分组召唤)接收→S帧:注意:记录接收到的长帧,双方可以按频率发送,比如接收8帧I帧回答一帧S帧,也可以要求接收1帧I帧就应答1帧S帧。
68 04 01 00 02 00接收→总召唤确认(发送帧的镜像,除传送原因不同):68(启动符)0E(长度)00 00(发送序号)00 00(接收序号)64(类型标示)01(可变结构限定词)07 00(传输原因)01 00(公共地址即RTU地址)00 00 00(信息体地址)14(同上)发送→S帧:注意:记录接收到的长帧,双方可以按频率发送,比如接收8帧I帧回答一帧S帧,也可以要求接收1帧I帧就应答1帧S帧。
68 04 01 00 02 00接收→YX帧(以类型标识1为例):68(启动符)1A(长度)02 00(发送序号)02 00(接收序号)01(类型标示,单点遥信)04(可变结构限定词,有4个遥信上送)14 00(传输原因,响应总召唤)01 00(公共地址即RTU地址)03 00 00(信息体地址,第3号遥信)00(遥信分)发送→S帧:68 04 01 00 04 00接收→YX帧(以类型标识3为例):68(启动符)1E(长度)04 00(发送序号)02 00(接收序号)03(类型标示,双点遥信)05(可变结构限定词,有5个遥信上送)14 00(传输原因,响应总召唤)01 00(公共地址)01 00 00(信息体地址,第1号遥信)02(遥信合)06 00 00(信息体地址,第6号遥信)02(遥信合)0A 00 00(信息体地址,第10号遥信)01(遥信分)0B 00 00(信息体地址,第11号遥信)02(遥信合)0C 00 00(信息体地址,第12号遥信)01(遥信分)发送→S帧:68 04 01 00 06 00接收→YC帧(以类型标识9为例):68(启动符)13(长度)06 00(发送序号)02 00(接收序号)09(类型标示,带品质描述的遥测)82(可变结构限定词,有2个连续遥测上送)14 00(传输原因,响应总召唤)01 00(公共地址)01 07 00(信息体地址,从0X0701开始第0号遥测)A1 10(遥测值10A1)00(品质描述)89 15(遥测值1589)00(品质描述)发送→S帧:68 04 01 00 08 00接收→结束总召唤帧:68(启动符)0E(长度)08 00(发送序号)02 00(接收序号)64(类型标示)01(可变结构限定词)0A 00(传输原因)01 00(公共地址)00 00 00(信息体地址)14(区分是总召唤还是分组召唤,02年修改后的规约中没有分组召唤)发送→S帧:68 04 01 00 0A 00第二步:发送对时报文(通过设置RTU参数表中的”对间间隔”,单位是分钟,一般是20分钟)发送→对时命令:68(启动符)14(长度)02 00(发送序号)0A 00(接收序号)67(类型标示)01(可变结构限定词)06 00(传输原因)01 00(公共地址)00 00 00(信息体地址)01(毫秒低位)02(毫秒高位)03(分钟)04(时)81(日与星期)09(月)05(年)接收→对时确认:68(启动符)14(长度)0C 00(发送序号)02 00(接收序号)67(类型标示)01(可变结构限定词)07 00(传输原因)01 00(公共地址)00 00 00(信息体地址)**(毫秒低位)**(毫秒高位)**(分钟)04(时)81(日与星期)09(月)05(年)发送→S帧:68 04 01 00 0E 00第三步:电度总召唤(如果没有电度此步骤可以省略且可以在对时之前以送.通过设置参数中”全数据扫描间隔”,单位是分钟一般是15分钟召唤一交,如果不需要召唤电度一定要将参数中的电度个数设为0)发送→召唤电度:68(启动符)0E(长度)04 00(发送序号)0E 00(接收序号)65(类型标示)01(可变结构限定词)06 00(传输原因)01 00(公共地址)00 00 00(信息体地址)45(QCC)接收→召唤确认(发送帧的镜像,除传送原因不同) :68(启动符)0E(长度)10 00(发送序号)06 00(接收序号)65(类型标示)01(可变结构限定词)07 00(传输原因)01 00(公共地址)00 00 00(信息体地址)45(QCC)发送→S帧:68 04 01 00 12 00接收→电度数据:68(启动符)1A(长度)12 00(发送序号)06 00(接收序号)0F (类型标示)02(可变结构限定词,有两个电度量上送)05 00(传输原因)01 00(公共地址)01 0C 00(信息体地址,从0X0C01开始第0号电度)00 00 00 00(电度值)00(描述信息)02 0C 00(信息体地址,从0X0C01开始第1号电度)00 00 00 00(电度值)01(描述信息)发送→S帧:68 04 01 00 14 00接收→结束总召唤帧:68(启动符)0E(长度)14 00(发送序号)06 00(接收序号)65(类型标示)01(可变结构限定词)0A 00(传输原因)01 00(公共地址)00 00 00(信息体地址)45(QCC)发送→S帧:68 04 01 00 16 00第四步:如果RTU有变化数据主动上送主动上送变位遥信,类型标识为1或3接收→变位遥信:68(启动符)0E(长度)16 00(发送序号)06 00(接收序号)01(类型标示,单点遥信)01(可变结构限定词,有1个变位遥信上送)03 00(传输原因,表突发事件)01 00(公共地址即RTU地址)03 00 00(信息体地址,第3号遥信)00(遥信分)发送→S帧:68 04 01 00 18 00接收→变位遥信:68(启动符)0E(长度)18 00(发送序号)06 00(接收序号)03(类型标示,双点遥信)01(可变结构限定词,有1个变位遥信上送)03 00(传输原因,表突发事件)01 00(公共地址即RTU地址)06 00 00(信息体地址,第6号遥信)01(遥信分)发送→S帧:68 04 01 00 1a 00主动上送SOE,类型标识为0x1e或0x1f接收→SOE :68(启动符)15(长度)1a 00(发送序号)06 00(接收序号)1e (类型标示,单点遥信)01(可变结构限定词,有1个SOE)03 00(传输原因,表突发事件)01 00(公共地址即RTU地址)08 00 00(信息体地址,第8号遥信)00(遥信分)ad(毫秒低位)39(毫秒高位)1c(分钟)10(时)7a(日与星期)0b(月)05(年)发送→S帧:68 04 01 00 1c 00接收→SOE :68(启动符)15(长度)1c 00(发送序号)06 00(接收序号)1f (类型标示,双点遥信)01(可变结构限定词,有1个SOE)03 00(传输原因,表突发事件)01 00(公共地址即RTU地址)0a 00 00(信息体地址,第10遥信)01(遥信分)2f(毫秒低位)40(毫秒高位)1c(分钟)10(时)7a(日与星期)0b(月)05(年)第四步:如果主站超过一定时间没有下发报文或RTU也没有上送任何报文则双方都可以按频率发送U帧,测试帧发送→U帧:68 04 43 00 00 00接收→应答:68 04 83 00 00 00第五步:遥控发送→遥控预置:68(启动符)0e(长度)20 00(发送序号)06 00(接收序号)2e (类型标示)01(可变结构限定词)06 00(传输原因)01 00(公共地址即RTU地址)05 0b 00(信息体地址,遥控号=0xb05-0xb01=4)82(控合)接收→遥控返校:68(启动符)0e(长度)0e 00(发送序号)06 00(接收序号)2e (类型标示)01(可变结构限定词)07 00(传输原因)01 00(公共地址即RTU地址)05 0b 00(信息体地址,遥控号=0xb05-0xb01=4)82(控合)发送→遥控执行:68(启动符)0e(长度)04 00(发送序号)18 00(接收序号)2e (类型标示)01(可变结构限定词)06 00(传输原因)01 00(公共地址即RTU地址)05 0b 00(信息体地址,遥控号=0xb05-0xb01=4)02(控合)接收→执行确认:68(启动符)0e(长度)12 00(发送序号)08 00(接收序号)2e (类型标示)01(可变结构限定词)07 00(传输原因)01 00(公共地址即RTU地址)05 0b 00(信息体地址,遥控号=0xb05-0xb01=4)02(控合)发送→遥控撤消:68(启动符)0e(长度)04 00(发送序号)18 00(接收序号)2e (类型标示)01(可变结构限定词)08 00(传输原因)01 00(公共地址即RTU地址)05 0b 00(信息体地址,遥控号=0xb05-0xb01=4)02(控合)接收→撤消确认:68(启动符)0e(长度)12 00(发送序号)08 00(接收序号)2e (类型标示)01(可变结构限定词)09 00(传输原因)01 00(公共地址即RTU地址)05 0b 00(信息体地址,遥控号=0xb05-0xb01=4)02(控合)补充说明:1、报文中的长度指的是除启动字符与长度字节的所有字节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
变频器传递十进制有符号整数 16384(4000H 十六进制) 对应于 100%的速度,最大速度为 32767(200%),PLC读取 变频器转速值后,要经过标准化才能得到实际转速。
谢谢聆听
标准报文1:转速控制
STW1 ZSW1
NSOLL_A NIST_A
西门子标准报文1通信规约 西门子标准报文1控制字
西门子标准报文1通信规约 西门子标准报文1控制字
西门子标准报文1通信规约 西门子标准报文1状态字
西门子标准报文1通信规约 西门子标准报文1状态字
西门子标准报文1通信规约
西门子标准报文1应用
变频起停:
16#047E 变频器停止 16#047F 变频器起动
速度设定:
速度设定值要经过标准化,变频器接收十进制有符号整 数 16384(4000H 十六进制)对应于 100%的速度,接收的最 大速度为 32767(200%)。
西门子标准报文1通信规约
西门子标准报文1应用
变频状态:
读取状态字可知变频器运行状态,变频器是否运行,正 反转等。
西门子标准报文1通信规约源自 西门子标准报文1通信规约CONTENTS
1 西门子标准报文1概述 2 西门子标准报文1控制字 3 西门子标准报文1状态字 4 西门子标准报文1应用
西门子标准报文1通信规约
西门子标准报文1概述
在西门子自动化系统中,PLC经常以通信方式与底层变频器交换数据,控制变频 器起动和停止,并通过网络获取电机运行状态。