基于TMS320F2812的全数字交流伺服系统设计_雷启华
一种基于TMS320F2812的实时多任务控制系统软件设计方法的研究
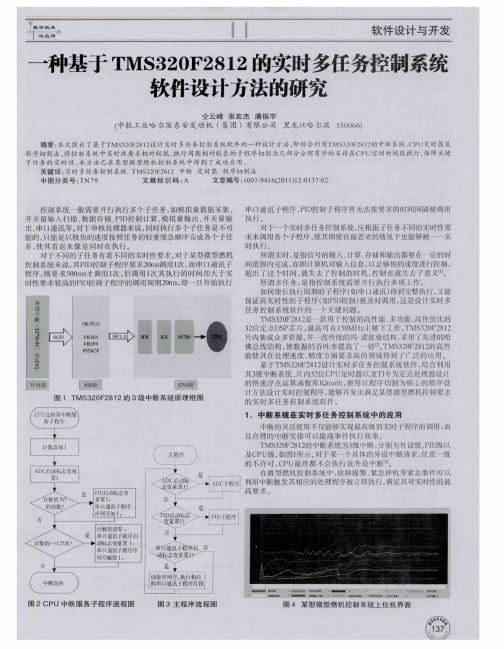
3 P 、C U定时器在实时多任务控制 系统中应用
对于一个实时多任务控制系统 , 许多子程序的调用与相对时间 有关 , on调用一次PD 如2 r s I 控制程序、0ms 50 i N用一 次串口通讯子程 序、 点火操作 最长时间为 1秒等 。 0 显然 使 用 延 时程 序 不 但 不容 易 实 现精 确 定 时 , 重要 的是 会 占 更 用C U时间 , P 不利于实现实时多任务控制 系统的设计 。 种有效 的方法是利用T 3 0 2 1片上的C U定时器进行 MS 2 F 82 P 定时, 由定时 中断子程序去判断时序 , 发相应的子程序 , 以很好 触 可 的协调 不同实时性要求 的子程序 有序 执行 。 T 3 0 2 1器 件 上 有 3 3 位 C U定 时器 ( I R / / ) MS 2 F 8 2 个 2 P T ME 0 1 2 。 当r 3o 2 l运行在10 z ,P r 2F 82 A 5MH 时 C U定时器可以触发最短66n .7s
一
[] 1 于海生, 丁军航 . 微型计算机控制 技术 ( 2版 ) 第 . 清华大学 出版
社,0 9 1 原理及 其 C 言程序开发. T ¥2F8 2 语 清华大学出版
社,0 8 20 . [ ] E A N T U E T .M 3 0 2 1 S yt m C n r l n n 3T X S IS R M N ST S 2 x 8 D PS s e o t o d I — X a
t r u t e e e c u d , 0 8 e r p sR f r n e G ie2 0 .
软件设计 与开发
2、程序切割法
正如 引言中所提到 的, 一旦 长执行 时间的子程序被 主程序调 用, 调用周期较短的子程序将不能够按设计要求被及时调 用 , 而 从 影响控制器 的控 制性 能及响应事件的实时性 。 我们 以微型燃机控制系统P D I 控制 子程序 和串 口通讯子程序 为例进行研 究说 明。 系统 要求每2 ms 0 调用1 I 控制子程序 , 次PD 执行 1 I 控 制子程序 的时间大 约为2 。 E通讯 子程序为每50 次PD ms串 l 0ms 执行 1 , 次 执行1 次大 约需要 lO 。 口通讯 子程 序一旦被主程序 O ms 串 调 用执行 , 其执行完毕前PD控制子程序将无法被调用 。 在 I 如何 既 能够使 串E通讯子程序被执行 , l 又能使PD I 控制子程序 按设 计要 求 的2ms 用周期被实时调用 ? 0 调 注意到P D 制子程序两次调用时间间隔虽然为2ms但每 次 I控 0 , 的执行时间仅为2 , P msC U还有大约1ms 8 的空闲时间( 暂假定系统 只有P D I 控制和 串 口通讯两个子程序需要 执行 )串 口通讯子程序 1 。 次执行时间虽然为 10 , 0 ms但调用周期为50 , 0ms 即在 50 内执行 0ms 完整个通讯程序 即能满足其 实时性设计要求 。 种有效的解决方案是将 串 E通讯 子程序切割为几个执行周 l 期很短( 小于C U空闲时间1ms的子程序 , P 8 ) 分别安排在P D I 控制子 程序执行后被 执行 , 每个子程序只完成很少数 据的传输任务 , 经过 多次调用 即可 完成1 完整 的数据通讯任务 , I 控 制子程序合 次 与P D 计总执行 时间小 于50 , 0 ms能够满 足通讯任 务的实时性能要求 。 这 就是本文提 出的实时多任务控制系统 的程序切割设 计方法 。 通过程序切割法还可 以对控制系统中其它子 程序进行切割分 步执行 , 满足其不 同的实时性要求 。
基于TMS320F2812的全数字交流伺服系统设计

能 D P芯片 T 3 0 2 1 S MS 2 F 8 2实现 数 字化双 闭环 系统 , 即速度环 、 电流 环 的控 制系 统 , 计 了具 有完 整保 护 设 和 监控功 能 的 P M伺 服系 统 MS
23 辅助 电路设 计 .
231 位 置 / 度 信 号检 测 电路 .. 速
而 算 出 实 际 电流 大 小 ,实现 电机 V相 电流 信 号 反
馈 , 过坐标变换 、 经 比较 、 电流 调 节 器及 S P V WM 输 出. 构成 电流 闭环
定 稿 日期 :0 9 1 — 3 2 0 — 0 1
波 电路 。 变 电路采 用智 能功 率模 块 P 287 接 收 逆 S 16 .
D P输 出的经过缓冲 电路及 高速 光耦 6 3 S N17隔离后 的SP V WM 波 , 优 点如下 : 其 采用 第 5代 I B G T工艺 , 内置优 化后 的栅级 驱动和 过流 保护 、 欠压保 护 电路 , 超 小 型体积 , 出功率 强劲 的三 相波 形 , 输 供给永 磁 同
( MS P M)i cm l e yueo eit le t o e m d l(P s o pe db s f h n lgn w r oue IM)adT 30 2 S .hsat l dsr e h t t ei p n MS 2 F 8 D PT i rc eci st 1 2 ie b e
中事件 管 理器 ( V) 具 有 的捕 获 口及 正 交 解 码 电 E 所
到 电机 的 定 子 V相 绕 组 上 ,经 过采 样 电 阻后 得 到 20mV 以 内的 采 样 电压信 号输 入 到 感 应 输 入 引脚 6 V 。P B是 功 率智 能 模 块 的 V相 输 出 , 入 到 V . D 输 m
基于TMS320F2812的永磁直线电机伺服控制研究
第3 1 卷第 1 期
2 01 4年 1月
机
电
工
程
Vo 1 . 3l No. 1
J o u r n a l o f Me c h a n i c a l& E l e c t i r c a l E n g i n e e r i n电机 ; T M S 3 2 0 F 2 8 1 2 ; 伺服控制 ; 增 量式光栅 ; 前馈补偿 ; 跟踪误 差
中 图分 类 号 : T H 3 9 ; T M 3 5 9 . 4 文献标志码 : A 文章编号 : 1 0 0 1— 4 5 5 1 ( 2 0 1 4 ) 0 1 — 0 0 7 6— 0 5
基于TMS329F2812DSP的课程设计

目录一引言 (2)二设计目的 (3)三设计要求 (3)四总体设计 (4)4、1硬件部分 (4)4.1.1 数模转换操作的应用基础 (4)4.1.2 AD7303简介 (5)4.1.3 应用AD7303的DAC电路设计 (6)4.2 软件部分 (8)4.2.1 程序流程图 (8)4.2.2 在CCS集成开发环境下新建工程 (9)4.2.3在Simulator环境下观察信号的时域及FFT Magnitude波形 (11)4.2.4 程序清单 (15)4.3 调试部分 (23)4.3.1 硬件调试 (23)4.3.2 软件调试 (23)4.3.3 SCI串行数据传输 (24)五总结 (26)六参考文献 (27)一引言随着计算机技术的飞速发展,对信号发生器波形的要求越来越高。
目前,常用信号发生器大部分是由模拟电路构成,当这种模拟信号发生器用于低频输出时,由于需要较大的RC值,导致参数准确度难以保证,且造成体积和功耗偏大,而数字式波形发生器,因其输出幅值稳定、输出频率连续可调的优点,已逐渐取代了模拟电路信号发生器。
由于其运算速度高,系统集成度强的优势,可以设计基于DSP的正弦信号发生器,该发生器实时性强、可扩展性好、波形精度高、可调节频率和幅度、稳定性好、用途广泛,各方面均优于模拟信号发生器和数字信号发生器。
因此,本文提出了一种基于TMS320F2812的正弦信号发生器的设计方法。
本文提出了一种基于TMS320F2812实现正弦信号发生器的设计原理与方法,介绍了所设计的正弦信号发生器硬件电路结构和软件程序流程图。
在CCS开发环境下,建立了正弦信号发生器的陈或许编写工程。
通过导入加载程序,在PC机上利用软件仿真将正弦波形显示出来。
结合DSP硬件特性,通过D/A转换器得到设定参数的正弦波形输出,达到设计目的。
该信号发生器弥补了通常信号仪发生器模式固定,波形不可编程的缺点,其具有实时性强,波形精度高,可方便调节频率和幅度、稳定性好等优点。
基于TMS320F2812处理器矢量控制永磁同步交流电机

基于TMS320F2812处理器矢量控制永磁同步交流电机张涛
【期刊名称】《电脑开发与应用》
【年(卷),期】2010(23)12
【摘要】永磁同步交流电机(PMSAM)在电力传动领域发挥着重要的作用,是工业自动化不可缺少的组成部分,永磁同步电动机以其独特的优点适用于中小功率伺服场合.分析了永磁同步交流电机的数学模型和控制要求,介绍了永磁同步交流电机的矢量控制理论,并根据矢量控制理论运用TMS320F2812处理器对永磁同步交流伺服电机的控制.
【总页数】4页(P36-38,41)
【作者】张涛
【作者单位】国营785厂设计一所,太原,030024
【正文语种】中文
【中图分类】TM341
【相关文献】
1.基于TMS320F2812的双轴交流永磁同步电机伺服系统设计 [J], 雷力;李院生;易亚军;
2.基于TMS320F2812的交流永磁同步电机数字控制系统 [J], 黄笋翠;游林儒;王孝洪
3.交流矢量处理器AD2S100在永磁同步电机矢量控制中的应用 [J], 王明亮;唐永哲;庞振岳
4.基于TMS320F2812的永磁同步电机矢量控制研究 [J], 王雪丹;孙少杰
5.基于TMS320F28335的永磁同步交流伺服电机矢量控制系统设计 [J], 丁丽娜;崔新忠;何南
因版权原因,仅展示原文概要,查看原文内容请购买。
基于TMS320F2812 永磁同步电机交流调速系统实验

基于TMS320F2812 永磁同步电机交流调速系统实验1.引言数字信号处理器(DSP)可以用于语言处理、图象处理、高速控制、数字通讯、振动和噪声信号处理、声纳和雷达信号处理、仪器仪表、机器人等多个领域。
由于它能把数字信号处理的一些理论和算法实时实现,并迅速地推广到应用方面,因此得到了学术界和工程界的高度重视,被认为是实现数字化革命的催化剂。
交流永磁同步电动机(PMSM)具有结构简单、运行可靠、体积小、质量轻、损耗少、转矩/质量比高、功率因数高、效率高、易于散热、易于保养等显著特点,因而应用范围极为广泛,尤其是在要求高精度控制和高可靠性的场合,如航空航天、数控机床、机器人控制等方面。
够在石油、煤矿、大型工程机械等比较恶劣的工作环境下运行,这不仅加速了它取代异步电机的速度,同时也为永磁同步电机专用变频器的发展提供了广阔的空间。
随着永磁材料性能的大幅度提高和价格的降低,以及电力电子器件的进一步发展,永磁同步电动机己逐步成为交流伺服系统的主流。
同时随着微电子技术和功率电子技术的飞速发展,数字信号处理器(DSP),智能功率模块(IPM)出现等,促使交流伺服控制系统向全数字化、智能化、小型化、高速、高精度方向发展。
本文对全数字交流永磁同步伺服驱动器进行了研究与开发。
首先在熟练掌握永磁同步电动机工作原理的基础上,分析永磁同步电动机的数学模型,其次在电压空间矢量(SVPWM)技术以及永磁同步电机矢量控制原理基础上,利用系统的核心器件TMS320F2812,功率变换装置智能功率模块IPM,构建了全数字伺服系统的硬件平台。
然后设计了基于TMS320F2812的软件平台,给出了主程序流程图和中断服务子程序流程图,结合CCS集成开发环境,对整个控制系统进行了软件调试并且做了相关实验,得到了SVPWM的输出波形以及相电流波形,经实验证明该数字控制系统具有良好的控制性能。
2.永磁同步电机原理2.1永磁同步电机数学模型永磁同步电动机和绕线式同步电动机,它们在定子结构上都是由铁心和电枢绕组构成。
基于TMS320F2812的交流电机控制系统设计

床 控 制 等 高 精 度 应 用.本 文 基 于 T M S 3 2 O F 2 8 1 2分析 了空 间矢 量 脉宽 调制技 术 的基 本 原 理 , 利用 T M S 3 2 0 F 2 8 1 2专 用 于 S V P WM 波 形 生 成 的 硬 件 电 路 , 提 出 了
基金项 目: 湖南 省教育厅一般项 目( 1 I C 1 1 3 0 ) 作者简介 : 邱雄 迩 ( 1 9 7 3 一) , 男, 湖南 隆回人 , 硕士 , 讲师 , 研究方 向 : 电力 电子与 电气传动. E - m a i l : c e k o n g p g 2 0 0 8 @1 2 6 . c o n r
收 稿 日期 : 2 0 1 3 — 0 2 — 2 6
变器输 出线 电压基 波最 大 幅值 为直 流侧 电 压, 这 比正 弦脉 宽 调 制 逆 变器 输 出 电压 高
出 1 5 %… .
在 电机 控 制 技 术领 域 , 1 [ I 公 司推 出的
2 O 0 O系列 中的 3 2位定点 D S P T NS 3 2 0 F 2 8 1 2 属 于较新 高端产 品 , 适 合工 业 电气控 制 、 机
Ke y wo r d s : D S P; T MS 3 2 0 F 2 8 1 2;S VP WM; F OC
0 引 言
在交 流 电机 变 频 调速 中 P WM 控 制 已 经得 到 了广 泛 应 用 , 其 中经典 的正 弦脉 宽 调制 ( S P WM)是 一种近似 地抑 制谐 波 的方 法, 使逆变器 输 出 的电压尽 量 接 近正 弦波 , 使P WM 电压波 的基 波成分 尽量 大 , 谐 波成 分 尽 量 小 .而 电 压 空 间 矢 量 脉 宽 调 制 ( S V P WM)视逆变器 和电机为一体 , 控 制 电 机获得 幅值 恒定 的 圆形 旋 转 磁 场. 它 能 够 明显地 减 少 逆 变器 输 出 电压 的谐 波 成 分 、 电动机 的谐 波耗 损 和转 矩 的脉 动 , 而 且 逆
基于TMS320F2812的测控硬件系统设计
毕业设计说明书基于TMS320F2812的测控系统硬件设计学生姓名:学号:学院:专业:指导教师:2008年06月基于TMS320F2812的测控系统硬件设计摘要随着大规模集成技术的发展,数字信号处理器(DSP)在功能、处理速度和处理能力方面都取得了划时代的突破,并广泛应用在数据通信、图像处理、语音处理、自动控制等领域中。
本文首先分析了嵌入式测控系统的系统结构和特点,结合嵌入式测控系统的发展要求分析了基于DSP的嵌入式测控系统的应用需求,并在此基础上提出了基于DSP的嵌入式测控系统结构,设计了基于TMS320F2812测控系统的硬件系统,该测控系统能够为测试产品提供所需的模拟量(D/A),为测试产品提供所需的数字量(A/D),为测试产品提供所需的429串行信号,测试系统可通过标准EPP并口与上位机相联,通过上位机可对该测试及产品进行检测,并有输出显示面板及按键输入功能,整个系统的逻辑控制采用CPLD来实现,便于系统的升级。
然后,设计出了该系统的各个组成模块和系统软件。
并利用实验室实验的手段实现了部分系统的功能,并进行了电路的调试,证明了该系统的可行性。
关键字:DSP,嵌入式测控系统,CPLD,EPP通信,429串行信号Based on the TMS320F2812 monitoring systemhardware designAbstrctWith the development of large-scale integrated technology, digital signal processor (DSP) in terms of functionality, processing speed and processing power have made an epoch-making breakthrough and widely used in data communications, image processing, speech processing, such as in the field of automatic control.This dissertation analyzed the embedded monitoring and control system structure and characteristics of the system, with embedded monitoring and control system requirements for the development of DSP-based embedded monitoring and control system of demand, and on this basis by the DSP-based embedded monitoring and control system architecture Designed monitoring system based on TMS320F2812 the hardware system, the micro-monitoring system for testing products to provide the necessary analog (D / A), to test products for digital (A / D), test system through standard EPP parallel port associated with the PC through the PC can test and The 429 serial signal also can test products, and the output display panel and the key input, the logic control system as a whole CPLD used to achieve, for system upgrades. Then, the design of the various components of the system modules and system software. And use of laboratory means of verification of the entire system repeatability, and a good time to the stability of the basic functions of the normal operation. Prove the feasibility of the system.Key words: embedded monitoring and control system, CPLD, EPP communications, 429 serial signal1 绪论1.1 引言20世纪70年代以来,计算机、微电子、半导体、智能控制等技术迅猛发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第44卷第4期2010年4月Vol.44,No.4April ,2010电力电子技术Power Electronics定稿日期:2009-10-13作者简介:雷启华(1984-),男,四川西昌人,硕士,研究方向为机电控制及自动化。
1引言随着交流伺服控制技术的不断进步,交流伺服驱动系统将逐渐取代直流伺服系统。
由于永磁同步电机(Permanent Magnet Synchronous Motor ,简称PMSM )伺服系统能够实现高精度、高动态性能、大范围的速度伺服控制,因此它在交流伺服驱动系统中占据重要地位,全数字化是未来伺服驱动技术发展的趋势[1]。
采用交流永磁同步伺服电机作执行机构构成交流伺服系统,PMSM 采用矢量控制算法,控制系统采用高性能DSP 芯片TMS320F2812实现数字化双闭环系统,即速度环、电流环的控制系统,设计了具有完整保护和监控功能的PMSM 伺服系统。
2伺服系统的硬件设计整个伺服系统硬件由主电路、控制电路、辅助电路等构成。
其中主电路由三相整流电路、滤波电路、逆变电路、PMSM 等构成;控制电路由高性能DSP 芯片TMS320F2812及其外围电路构成;辅助电路由基于IR2175的电流检测电路、基于复合式光电编码器的位置/速度检测电路、保护电路等构成。
其硬件电路图如图1所示。
TMS320F2812DSP 作为主控芯片,实现速度环、电流环数字双闭环控制,以及失量变换、SVPWM 生成、故障信号处理、串口通信、键盘显示等。
复合式光电编码器采集的位置脉冲信号传送至DSP 处理后产生电机转子的位置信号和速度信号,作为失量变换所需的角度信息和速度闭环反馈。
电流传感芯片IR2175采集的电流信息传送到DSP 外部中断及捕获口,经处理后得出实际电流作为电流反馈信号。
2.1主电路的设计主电路为AC/DC/AC 变换电路,主要由整流电路、滤波电路和逆变电路构成。
整流电路采用整流模块GBU2510将输入的交流电变换成直流电,整流电路输出的直流电压含有脉动成分,故须加入大电容滤波电路,逆变电路采用智能功率模块PS21867,接收DSP 输出的经过缓冲电路及高速光耦6N137隔离后的SVPWM 波,其优点如下:采用第5代IGBT 工艺,内置优化后的栅级驱动和过流保护、欠压保护电路,超小型体积,输出功率强劲的三相波形,供给永磁同步伺服电机,利于产品的小形化设计。
基于TMS320F2812的全数字交流伺服系统设计雷启华,楼佩煌,郭超(南京航空航天大学,江苏南京210016)摘要:采用智能功率模块和TMS320F2812型DSP ,完成了永磁同步电机(Permanent Magnet Synchronous Motor ,简称PMSM)全数字交流伺服系统的设计与实现。
介绍了系统的硬件设计,包括主电路、控制电路、基于IR2175的电流检测电路、复合式光电编码器的位置/速度检测电路以及保护电路的设计。
分析了d ,q 轴中PMSM 的数学模型和i d =0的矢量控制策略,在CCS 下采用模块化编程的思想实现了基于矢量控制的速度伺服系统。
关键词:永磁同步电机;全数字;交流伺服;电流检测中图分类号:TM313文献标识码:A文章编号:1000-100X (2010)04-0048-03Digital AC Servo System Design Based on TMS320F2812LEI Qi -hua ,LOU Pei -huang ,GUO Chao(Nanjing University of Aeronautics and Astronautics ,Nanjing 210016,China )Abstract :The design and implementation of full -digital AC servo system based on permanent magnet synchronous motor (PMSM )is completed by use of the intelligent power module (IPM )and TMS320F2812DSP.This article describes the hardware design of the system ,including the main circuit ,control circuit ,current sampling circuit based on IR2175,the position/velocity sampling circuit based on hybrid optical encoder ,the protection circuit design.The motor mathematical model in the d ,q axis coordinate system and the i d =0vector control principle are analyzed.In the CCS ,the speed servo sys -tem based on vector control is achieved under the modular programming ideology.Keywords :permanent magnet synchronous motor ;full -digital ;AC servo ;current testing482.2控制电路的设计系统应用高性能32位定点TMS320F2812型DSP芯片作主控芯片,控制电路由TMS320F2812及其外围电路组成,该芯片特别适合电机控制和运动系统控制,具有数据处理能力强,存储空间大,中断响应处理迅速,外围设备电路完善等优点,适合做失量变换、产生SVPWM、实现数字PI调节等工作,其中事件管理器(EV)所具有的捕获口及正交解码电路适合系统处理复合式光电编码器所采集的电机位置及速度信息。
该芯片的正交解码电路能将复合式光电编码器所发出的两相正交脉冲进行4倍频处理,提高了分辨率,使位置和速度信息更精确。
捕获口和外部中断适合系统基于电流传感芯片IR2175的电流检测。
由DSP产生的SVPWM波,经过三态线性驱动器/缓冲器74LCX244增强驱动能力和限流电阻,并经高速光耦6N137隔离后送给功率智能模块。
2.3辅助电路设计2.3.1位置/速度信号检测电路系统利用2500线的复合式光电编码器采集电机的位置及速度信息,其输出有A,B正交脉冲两路,零脉冲Z1路,及U,V,W3路互差120°的矩形脉冲。
电机上电时通过U,V,W的状态组合可以估计出电机转子的初始位置,以实现电机的启动,一旦电机旋转起来,编码器的A,B,Z3路脉冲可精确的检测出电机的位置。
这6路脉冲均采用差分输出,差分信号经过滤波后由差分接收器AM26LS32接收转换为单端信号,再经74LVC14整形,A,B,Z3路脉冲连接到DSP的QEP接口,U,V,W连接到DSP的I/O口。
其中1路脉冲的处理电路如图2所示。
2.3.2相电流检测电路系统的相电流检测基于IR2175电流传感芯片,它是专为交流或直流无刷电机的驱动应用而设计的高压线性电流传感器。
它内置电流检测和保护电路,可通过串联在绕组回路的取样电阻来获得绕组电流,无需A/D转换芯片就能自动将输入模拟信号转换成数字PWM信号输出,可直接与DSP相连。
同传统的霍尔电流传感器相比,IR2175具有温漂低,数字PWM输出,可简化接口电路,无需线性光耦及A/D 转换器,8脚PDIP或SOIC封装等优点[2]。
基于IR2175的PMSM的V相电流检测电路如图3所示。
IR2175的高压侧供电电压ub和补偿电压us的输入来自于u p相驱动电源u fb。
低压侧的供电电压为15V。
PB接到电机的定子V相绕组上,经过采样电阻后得到260mV以内的采样电压信号输入到感应输入引脚V in+。
PDB是功率智能模块的V相输出,输入到V in-与PB进行比较,从PO口输出一个占空比随电流幅值大小改变的数字PWM信号SENB。
该信号经过高速光耦6N137隔离后,输入到DSP的捕获口CAP4和外部中断XINT1,计算出PWM信号的占空比,进而算出实际电流大小,实现电机V相电流信号反馈,经过坐标变换、比较、电流调节器及SVPWM输出,构成电流闭环。
2.3.3保护电路的设计系统的保护电路由过压保护、欠压保护、过流保护组成。
当出现过压、欠压、过流时保护电路输出故障信号,和IPM故障信号一起输入与门芯片后连接到DSP的PDPINTA引脚,一旦其中一个输出故障信号,则PDPINTA上的信号变低,触发DSP的功率保护中断,DSP的PWM输出立刻被封锁,从而实现系统保护。
3PMSM的数学模型及失量控制原理假设忽略铁心饱和,不计涡流和磁滞损耗,转子上无阻尼绕组,永磁体也无阻尼作用;永久磁铁在气隙中产生的磁势为正弦分布,且无高次谐波,即定子的空载电势为正弦波。
图4示出PMSM矢量图。
推导出PMSM在d,q坐标系中的电压方程[3]:u d=R s i d+pΨd-ωrΨq,u q=R s i q+pΨq+ωrΨd(1)式中:ud,uq,id,iq,Ψd,Ψq为定子电压、电流、磁链在d,q轴上的分量;Rs为定子绕组相电阻;ωr为转子电角速;p为微分算子。
磁链及转矩方程为:Ψd=L d i d+Ψf,Ψq=L q i q,T e=p n(Ψd i q-Ψq i d)(2)式中:pn为转子极对数;Ld,Lq为d,q轴上的电感。
将式(2)中前两式代入第3式得:基于TMS320F2812的全数字交流伺服系统设计49第44卷第4期2010年4月Vol.44,No.4April ,2010电力电子技术Power ElectronicsT e =p n [(L d -L q )i d i q +Ψf i q ](3)式中:Ψf 为转子永磁体产生的与定子交链的磁链。
由式(3)可见此时PMSM 的转矩控制与直流电机相似,实现了d ,q 轴的解耦,通过控制i q ,i d 根据坐标变换理论实现电机定子电流的控制,即可实现PMSM 的矢量控制。
采用i d =0的矢量控制方式,则转矩方程可进一步简化为:T e =p n Ψf i q ,可见控制i q 即可控制转矩。
i d =0的矢量控制原理图如图5所示。
4伺服系统的软件设计整个软件在CCS 集成开发环境下完成,伺服系统的软件可简单分为主程序和中断服务程序两部分。
主程序主要完成DSP 系统的初始化,以及程序中用到的各变量的初始化,设置允许中断,串口通讯程序等。