四象限变流器控制策略的探讨1
机车牵引四象限变流器研究

华中科技大学硕士学位论文机车牵引四象限变流器研究姓名:赵文才申请学位级别:硕士专业:电力电子与电力传动指导教师:熊健2011-01-04华中科技大学硕士学位论文摘要随着高速铁路的发展,电力牵引因其高效、节能、环保、灵活的优势成为世界牵引主流[1]。
电力牵引节能的两个最关键问题是,实现高功率因数和能量回馈。
这两个问题综合体现在对网侧电流的控制上,这也是四象限变流器最重要的功能之一,在网侧获得正弦性好、功率因数高的输入电流。
此外四象限变流器还需稳定直流电压,实现能量双向流动。
对变流器的控制离不开其数学模型,本文首先分析了四象限变流器工作的原理,然后在此基础上给出了四象限变流器在正弦稳态下的数学模型。
根据这个数学模型,可以用间接电流控制来实现四象限变流器稳压控制。
接着本文介绍了两重四象限变流器的控制技术,包括载波移相、单位基波功率因数控制、有功电流均流控制、无功电流均流控制等。
另外,网侧电压的同步对四象限变流器控制也非常重要,为了保证可靠性,本文采用基于DFT的数字锁相技术来实现网侧同步。
用于机车牵引的四象限变流器有其特殊性,比如功率大、开关频率低、电路参数变化、实际运行时存在跳弓过分相等问题。
这决定对机车牵引四象限变流器的控制,不仅需要采用上述控制技术改善性能,还需要采用特殊的方法解决开关频率低、跳弓等问题所带来的影响。
本文对机车牵引四象限变流器做了细致的仿真分析,包括启动波形、空载半载满载运行波形、并联运行波形、循环功率仿真波形等。
机车牵引四象限变流器能够在实车上运行,必须设计好严谨的工作主流程。
机车牵引四象限变流器的工作主流程包含了四象限变流器所有运行状态,状态之间相互跳转的条件以及逻辑关系。
本文最后给出了机车牵引四象限变流器带主流程工作的部分实验波形,包括启动波形、空载波形、突加减负载波形、跳弓过分相波形。
关键词:四象限变流器幅相控制载波移相机车牵引华中科技大学硕士学位论文AbstractWith the development of high-speed railway, because of its advantages - efficiency, energy saving, environmental protection, flexible, power traction has become the mainstream trend of traction. Electric traction can save energy because of the high power factor and energy feedback. Both of the two issues are reflected in the current control on the grid side, which is one of the most important the functions of four quadrant converter that obtains good sinusoidal and high power factor in the input side, in addition ,four quadrant converter should also maintain DC voltage and achieve two-way flow of energy.The control of the converter can not do without the mathematical model. Firstly, this paper analyzes the working principle of four-quadrant converter, and then on this basis, gives a mathematical model of four-quadrant converter under the sinusoidal steady state. According to this model, DC voltage stability can be easily achieved using the indirect current control for the control of four-quadrant converter. Secondly, this article describes more control technologies can be used for the double and four quadrant converter. Then,this paper introduced carrier phase-shifting modulation, the unit fundamental power factor control, balanced control of active current and reactive current. In addition, the synchronization of the grid voltage is also very important for the control of four-quadrant converter, in order to ensure reliability, we use the DFT-based digital PLL technology to achieve synchronization.Four-quadrant converter used in traction has its special place, such as big power, low switching frequency, changing parameters in the actual operating, neutral-section passing and pantograph jumping process. This determines, for this four-quadrant converter control, we should not only adopt control technologies described above to improve performance, but also find special methods to response to the low switching frequency, pantograph jumping etc.. In this paper, simulation analysis including start-up, empty , half and full loads, parallel operation,cycle power has been researched.The main flow of four-quadrant converter for traction contains all the running state, the conditions and the logic between the state jumping the conditions. Finally, experiment that four-quadrant converter working with main flow waveforms including start-up wave, empty-load waveforms, sudden load and subtraction load waveforms, neutral-section passing and pantograph jumping process waves will be showed.Keywords: Four-quadrant converter PAC Carrier phase-shiftingElectric locomotive traction独创性声明本人声明所呈交的学位论文是我个人在导师的指导下进行的研究工作及取得的研究成果。
四象限变流器控制策略研究与仿真概要
四象限变流器控制策略研究与仿真宋文胜 , 刘志敏 , 冯晓云(西南交通大学电气工程学院 , 四川成都610031摘要 :在建立基于理想开关函数的单相四象限变流器数学模型的基础上 , 对四象限变流器常用的 5种控制策略进行研究 , 并通过计算机仿真对各种控制策略的控制性能进行对比分析。
仿真结果表明 , 预测电流控制和瞬态电流控制可以达到直流侧电压稳定、网侧电流谐波小、网侧单位功率因数等控制目标。
关键词 :四象限变流器 ; 控制策略 ; 仿真中图分类号 :U264.3+7; TM 461文献标识码 :A文章编号 :1672-1187(2007 02-0034-04Research and simulation on the control strategy of 4-quadrant converterSONG Wen-sheng , LIU Zhi-min , FENG Xiao-yun(College of Electrical Engineering , Southwest Jiaotong University , Chengdu 610031, ChinaAbstract :Based on the mathematic model of ideal switch function for a single-phase 4-quadrant converter , five kinds of control strategy are studied , and analysis is made for each strategy by computer simulation. Results show that the predicted current control andtransient current control can reach the control aims , such as voltage stabilization of DC-link , low harmonic distortion of the line current and unity power factor.Key words :4-quadrant converter ; control strategy ; simulation电力机车与城轨车辆Electric Locomotives &Mass Transit Vehicles研究开发第 30卷第 2期 2007年 3月 20日Vol. 30No. 2M ar. 20th , 2007收稿日期 :2006-10-20作者简介 :宋文胜 , 在读硕士研究生 , 主要研究方向为电力电子与电传动。
两相两重四象限变流器的控制方法及实现

关键词 :四象限变流器 ;控制方 法 ;双 闭环控制 ;电流控制 ;坐标 变换 ;载 波移相 ;控 制频率 ;电力 牵 引
传动系统
中 图分 类 号 :U2 6 4 . 2 2 3 ;U2 6 4 . 3 文 献标 识码 :A d o i :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 4 6 3 2 . 2 0 1 7 . 0 1 . 1 3 交 一直 一交电力牵传动系统 已成为国、内外电力
机 车技术 的发展 趋势 。
受开关器件技术条件的限制 ,单相单重 四象限 变流器在输 出更大功率时其主电路仍只能选用低开 关频率的开关器件 ,这就导致在牵引电网侧产生大 量 低次 谐 波 ,给牵 引 电 网带 来 污 染 。为 解 决 此 问 题 ,可采用多重化四象限变流器的主电路 ,即将至 少两重 四象限变流器进行并联 ,并分别对每重四象 限变 流器 的输 入 电流进行 控 制 ,从 而 达到 既可 减小
第3 8 卷, 第1 期 2 0 1 7年 1月
文章编号 :1 0 0 1 — 4 6 3 2( 2 0 1 7 )0 1 — 0 0 9 5 — 0 7
中 国 铁 道 科 学
CH I NA RA I LW AY S CI E NCE
V0 1 . 3 8 No . 1
较 高 ,而基 于坐标 变换 的 电流控 制方 法 由于将采 样 得 到 的交 流 电流转 换为 直流 电流 ,具 有可 以保证 控 制 系统稳 态误 差小 、动 态 响应快 的优 点 ,因此 理论 上对 大 功率 、低开 关频 率变 流器更 为 适用 ;二是 采 用 正弦 波 脉 宽 调 制 ( S P WM )技 术 和 载 波 移 相 技 术 ,可 通过 增加 硬件设 备实 现 或根据 变流 器 的开关 频 率进行 计算 实 现 。 本 文 以 目前 广泛 应用 的两相 两重 四象 限变 流器 ( 简称变流器)为研究对象 ,研究采用双闭环控制 时基 于坐标 变换 电流 内环控 制 方法对 大功 率 、低开 关 频率 变流 器 的适用性 ,提 出无 需增 设硬 件且 适用
四象限变流器双闭环电流控制的研究
四象限变流器双闭环电流控制的研究摘要:介绍了四象限变流器的工作原理,并在此基础上推导出四象限变流器的数学模型。
通过四象限变流器双闭环直接电流控制的数学模型搭建了仿真框架,最后通过MATLAB/Simulink进行了仿真研究,结果表明基于双闭环直接电流控制的四象限变流器具有很好的稳态和瞬态性能,网侧功率因数接近于1。
叙词:谐波污染功率因数直接电流控制Abstract:The four-quadrant converter mathematical model is derived by its operation principle and working conditions and then the simulation is built according to its mathematical model. The simulation which is used by MATLAB/Simulink proved that double-loop direct current control is an effective way to achieve stable output DC voltage, suppress the harmonics effectively and achieve the net power factor close to 1. Keyword:Harmonic pollution, Power factor, Direct current control1 引言随着电力电子装置的广泛使用,由此引起的谐波污染问题逐渐受到了人们的重视。
整流装置是谐波主要的来源,因此有必要研制高功率因数、低谐波整流器以消除谐波源。
与传统的二极管不控整流、相控整流相比,四象限变流器具有功率因数高、直流侧电压稳定、输入电流谐波小、开关损耗小、电磁污染少等优点[3]。
四象限变流器的控制策略主要有间接电流控制和直接电流控制两种。
四象限变流器技术应用研究

47四象限变流器技术应用研究朱玉斌 中国石化胜利油田胜利发电厂【摘 要】变频技术的迅猛发展促进了四象限变流器技术的诞生,其应用领域也越来越广泛,如应用于油井抽油机的电机控制,高压级联变频系统以及船舶轴带同步发电机变流器系统等等。
基于此,本文在详细介绍了四象限变流器的基本工作原理基础上,就四象限变流器技术在变频调速系统领域的应用特点进行了关键技术分析和理论验证。
【关键词】四象限变流器技术;变频调速系统在20世纪80年代,以绝缘栅双极型晶体管也就是IGBT为代表的复合型开关器件异军突起,它结合了MOSFET开关速度快和BJT在流能力大的优点,这样就使得IGBT工作频率比前两者有了很大的提高,并且随着不断进步的IGBT等全控型电力电子器件的迅速发展,电力电子电路的控制技术也逐步实现全方位的数字化和集成化,这里的典型代表是正弦波脉宽调制技术(SPWM),它把变频控制技术又向前推进了一步。
一、理论1.四象限变流器的基本原理图1中为三相全桥四象限变流器电路的拓扑结构。
从图中可以看出三相四象限变流器主电路和半桥电路相类似。
图中a e 、b e 、c e 为三相相电压,、b i 、c i 为三相线电流,16T T 和16D D 分别为绝缘栅双极型晶体管IGBT;C为直流侧电容;l R图1三相四象限变流器的拓扑结构2.四象限变流器的数学模型三相桥式四象限变流器和半桥式相类似。
图2为三相电压型四象限变流器的主电路拓扑结构图。
为了保证四象限变流器的正常运行,直流电压必须高于交流侧输入电压的峰值。
其中a e 、b e 、c e 为电网电压,交流输入电流为a i 、b i 、c i ,直流母线电压为d U ,i R 回路等效电阻,dc i 是直流侧负载电流,交流侧电感为s L , d C 为直流侧滤波电容,直流侧负载等效阻抗定义为;O 点为直流侧假想的中点。
各电压、电流量均为瞬时值,正方向如图所示。
图2三相四象限变流的模型首先定义四象限变流器桥臂的开关函数K a 、b K 和c K 。
四象限变流器工作原理
四象限变流器工作原理1.引言1.1 概述四象限变流器是一种重要的电力电子器件,它能够实现直流电到交流电的转换。
其工作原理基于电力电子技术和控制理论,通过控制开关器件的通断,将直流电源经过逆变和变换,输出所需的交流电信号。
四象限变流器的主要特点是能够实现四个不同象限的电流、电压和功率输出。
这四个象限分别代表着正向和反向的电流、电压以及功率输出,在不同工作条件下可以根据需求进行切换。
这一特性使得四象限变流器在电力电子领域中具有广泛的应用空间。
四象限变流器的工作过程可以简要描述为:首先,通过电流传感器和电压传感器,监测输入直流电源的电流和电压信号。
然后,经过电压和电流的控制算法,得出需要输出的交流电信号的波形和频率。
接下来,利用开关器件进行逆变和变压,将直流电源的能量转换为交流电源的能量。
最后,输出所需的交流电信号,供给给定的负载使用。
四象限变流器的工作原理可以应用在多个领域,如电机控制、电力系统调节等。
其在电机控制领域中的应用特别广泛,能够实现电机的正向和反向转动,控制电机的转速和负载特性。
在电力系统调节方面,四象限变流器可以对电网进行有源功率调节,实现对电网的无功功率补偿和电压调节。
总之,四象限变流器通过控制电流和电压的方向和大小,实现了直流到交流的转换,具有广泛的应用前景。
在未来的发展中,随着对电能质量和能源管理的要求越来越高,四象限变流器将会得到更多的应用和研究。
1.2文章结构文章结构部分的内容如下:1.2 文章结构本文将分为三个主要部分来介绍四象限变流器的工作原理。
第一部分是引言部分,其中包括概述、文章结构和目的。
首先,我们将简要概述四象限变流器的基本概念,介绍其在电力电子领域中的重要性。
接着,我们将说明本文的结构,即将分为引言、正文和结论三个主要章节。
最后,我们将阐明本文的主要目的,即为读者提供关于四象限变流器工作原理的详细解释。
第二部分是正文部分,其中包括四象限变流器的基本原理和工作过程。
四象限脉冲整流器控制策略研究与实现

Re s e a r c h a n d Re a l i z a t i o n o n Co n t r o l S c h e me o f F o u r . q u a d r a n t P u l s e l c t i 】 f i e r
XI ANGLI Ya n n i ,YANG We i 。YUE We n— k a i ,ZHANG Pe n g
( C R RC Xi ’ Y o n g e J i e t o n g E l e c t r i c C o . , L t d . ,X i ’ 帆 7 1 0 0 1 6 ,C h i n a )
Ab s t r a c t : A c o n t r o l a l g o r i t h m o f f o u r - q u a d r a n t p u l s e r e c t i ie f r i s p r e s e n t e d, i t i s a v o l t a g e o u t e r l o o p a n d c u r r e n t i n —
t h e g o a l o f DC v o l t a g e s t a b i l i z a t i o n a n d n e t wo r k s i d e h i g h p o we r f a c t o r .
Ke y wo r d s : p u l s e r e c t i f i e r ;c u r r e n t d e c o u p l i n g c o n t r o l ;s i n g l e p h a s e - l o c k e d l o o p
l o o p ( P L L)t e c h n o l o g y b a s e d o n s e c o n d o r d e r g e n e r a l i z e d i n t e g r a t e d ( S O G I )a r e i n t r o d u c e d . T h e l a g o i r t h m c a n a c h i e v e
四象限变频器在电机控制中的有效性应用

四象限变频器在电机控制中的有效性应用摘要:随着当前社会经济、变频技术的不断进步与发展,电机控制对变频器应用技术也提高了要求。
四象限变频器应用于电机控制,通过控制逆变电压、幅值与相位的原理,将电能回馈到电网,起到节约能源、重复利用的作用。
本文将根据变频器的运作原理与基本规范,分析四象限变频器的运作原理、作用以及其应用的新型技术,以达到对电机控制更加完善的运作效果。
关键词:四象限变频器;电机控制;应用随着当前电子电力行业与交流控制技术的飞速发展,变频器在电机调速与控制中的应用也越来越广泛。
四象限变频器具有双向能量运动、节约能源、减少电网污染的运行优势,有效实现电机调速控制范围的扩大化与精准化,在现代电机控制中有着重要的地位。
我国四象限变频器的生产还在研发阶段,需要研究者对其原理与构成进行的进一步研究。
本文对变频器中四象限变频器的运作原理、优势与应用进行了探究与讨论,以寻求四象限变频器在电机控制中的最优策略。
1.变频器原理及相关问题分析1.1.变频器基本运作原理变频器是一种基本电能控制的装置,其基本运作原理就是通过电力半导体的通断实现工频电源变频作用,将工频电源的频率转变并进行电能交流的调速。
变频器的内部控制系统包括信号检测系统、电路控制以及触发脉冲电路:其中信号检测系统依靠传感变送器进行负电荷电流与电压的检测;电路控制即为处理先前检测到的信号,对比给定量获得电路需要的信号控制与动态情况;而触发脉冲电路则是依据电路控制环节所输出的信号进行触发脉冲,通过隔离驱动来放大驱动开关的功率器件运作[1]。
变频器主要应用于380V到6KV电压的电机控制,但由于其不同等级电压的拓扑结构有所不同,三相工频电流的输入则要根据不同等级电业设备的需要进行三相半桥或全桥的整流,而逆变器则可根据电压源型选择三相两变频结构,并运用电压空间矢量脉宽(SVPWM)调制技术进行逆变器的通断控制,实现直流电容电压到三相交流电压的变频,最后运用低通滤波器对先前SVPWM环节调制的高频毛刺进行过滤筛出,再连接异步电动机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四象限变流器控制策略的探讨1,概述交流传动技术是我国铁路牵引动力发展的主要方向。
对于单相供电牵引主变流器来说,电源侧四象限变流器是整个牵引系统的重要组成部分,对四象限变流器的控制策路对电网中的动率因数和电网电流中的高次谐波的含量有着决定性的影响。
对四象限变流器的控制必须达到以下两个目的:①但电网电压或负载发生变化时,维持中间回路直流电压的恒定;②使电网电流接近正弦波,电网功率因数接近于1,电网电流中的高次谐波的含量尽可能小,满足轨道电路对谐波电流限值的要求。
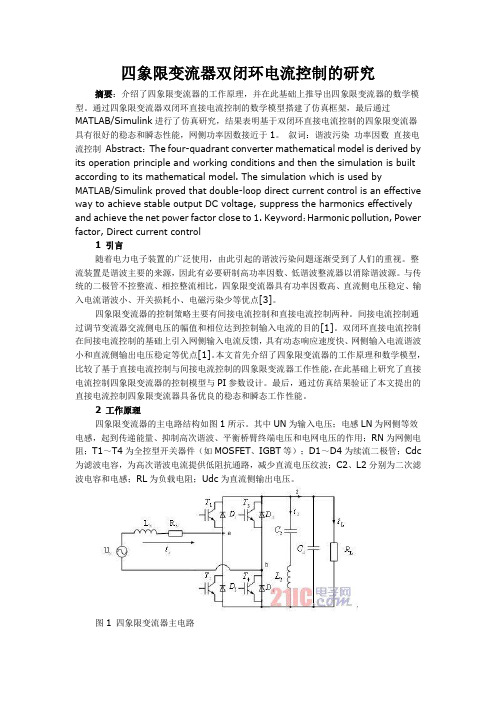
2,单相四象限变流器工作原理2.1,单相四象限变流器主电路原理图图1 单个四象限变流器主电路原理图图1中:方框部分是变压器牵引绕组的等效电路,L N 和R N 分别为折合到二次侧的牵引变压器绕组的漏感和电阻。
L2 和C2 构成二次滤波回路, C d 为直流侧支撑电容。
U N 为变压器二次侧电压矢量, I N1 为变压器二次侧电流的基波矢量, V1~V4 为可关断电力电子开关器件, D1~D4 为功率二极管, 通过对V1~V4 进行适当的导通与关断控制可以对直流侧电压进行调制, 从而在四象限变流器的输入端A、B生成一个与电网同步的脉宽调制波,记为U S 。
2.2,单相四象限变流器交流电网侧等效电路对于图1所示的单相四象限变流器主电路原理图,交流电网侧电路可以等效为图2。
图2 四象限变流器交流电网侧等效电路图图2 四象限变流器交流电网侧等效电路图2.3, 二次侧交流回路电压方程由图2可以得到二次侧交流回路的矢量电压方程:U N= U s-I N R N-jωL N I N ⑴假设U N和U S之间的相位差为Ψ,在牵引工况下, U N和I N的相位差应为0°,则用该方程表示牵引工况的矢量如图3(a) 所示,此时U S滞后I N;而对于再生制动工况, U N和I N的相位差应为180°,该工况下的矢量如图3 (b) 所示,此时US超前U N。
(a) 牵引工况 (b) 再生工况图3 四象限变流器控制矢量图由方程(1) 和矢量图可知: 如果变压器二次侧电压U N和电感I N为已知量,那末只要控制了U S的幅值和相位,也就控制了I N的幅值和相位。
反之,只要控制了I N的幅值和相位,也就控制了U S的幅值和相位,因此方程(1) 是实现四象限变流器控制的基本公式。
通常采用的双闭环控制的原理就是由此而来,它是通过控制U S的幅值来调节I N的相位,保证交流侧电网的基波功率因数为1;而通过调节U S的相位来调节I N的幅值,保证直流侧电压U d的稳定。
3,单相四象限变流器控制策略要使四象限变流器工作时达到单位功率因数,必须对电流进行控制,保证其为正弦且与电压同相或反相。
根据有没有引入电流反馈可以将这些控制方法分为两种:没有引入交流电流反馈的称为间接电流控制,间接电流控制也称为相位幅值控制;引入交流电流反馈的称为直接电流控制。
3.1间接电流控制⑴间接电流控制工作原理间接电流控制没有引入交流电流控制信号,而是通过控制四象限变流器的交流输入端电压,间接控制输入电流,故称间接电流控制。
又因其直接控制量为电压,所以又称为相位幅值控制。
间接电流控制具体的数学公式为:I N1=K p(U dg-U d)+1/T i∫(U dg-U d)dtI N2= I d I d /U NI N= I N1 + I N2u s (t) = u N (t)-( I N R N sinωt+ I NωL N cosωt) ⑵式中:K p和T i为PI调节器的参数;U dg为中间直流侧电压给定值,U d分别为中间直流电压实际值;I d分别为中间直流电流实际值;U N为交流侧电压的有效值;u N (t)为交流侧电压的瞬时值;I N为交流侧电流幅值的给定值;ω为网侧电压角频率;u s (t) 为电压的调制信号。
将电压调制信号u s(t)与三角载波比较,产生控制用的PWM信号,控制主电路的工作。
⑵间接电流控制原理图框图如图图2间接电流控制框图图中: PLL为锁相环, 用于保证所产生的i(T)与电网同步。
中间直流电压给定值U dg与反馈的中间直流电压实际值U d进行比较,若U dg=U d时,误差ΔE=0, I N1保持恒定;若U dg>U d时,误差ΔE>0, I N1增大,I N增大,输入功率增大;若U dg<U d时,误差ΔE<0, I N1减小,I N减小,输入功率减小。
通过电压反馈,改变输入电流的大小,调节输入的功率,从而维持中间直流电压的稳定。
交流侧指令电流幅值I N,经过两个乘法器转换成输入电流的有功分量i p和无功分量i q,分别经R和ωL环节,转换成电压信号。
再与电源电压u N(t)相减后,便得到给定电压的调制信号u s(t)。
将调制信号u s与三角波比较,产生控制用的PWM信号,控制主电路的工作。
⑶间接电流控制的优缺点这种控制方式的电路简单。
但由于缺少了电流环,响应速度受到一定程度的影响;另外,用到了电路参数R、L,电路参数与给定参数一致性较差,也会影响控制的精度。
3.2直接电流控制与间接电流控制不同,在控制电路中引入交流输入电流反馈信号,对输入电流进行直接控制,称为直接电流控制。
根据电流跟踪方法的不同,直接电流控制可分为滞环电流控制、定时瞬时值电流控制、瞬态直接电流控制、预测直接电流控制等。
3.2.1,滞环电流控制⑴滞环电流控制工作原理滞环直接电流控制是将交流侧实际电流i N(t)与交流侧指令电流I N sinωt之差Δi经滞环比较,直接产生主电路开关通断所需的PWM信号。
其数学公式为:I N1=K p(U dg-U d)+1/T i∫(U dg-U d)dtI N2= I d I d /U NI N= I N1 + I N2Δi= I N sinωt- i N (t)S K=S K*(-ε<Δi (t)<ε)S K=1(Δi (t)>ε)S K=0(Δi (t) <-ε)K=1,2 ⑶式中:i N (t)为交流侧电流的瞬时值;S K=1,PWM信号为高电平;S K=0,PWM信号为低电平。
S K*为上一时刻的值,2ε为滞环的宽度。
当交流侧指令电流I N sinωt与交流侧实际电流i N(t)之差︱Δi(t)︳<ε时, PWM信号保持不变;当Δi(t)<-ε时,PWM信号为低电平,对应的开关管关断,电感L N释放能量,Δi(t)逐渐减小(支撑电容Cd充电);当Δi(t)>ε时,PWM信号为高电平,对应的开关管导通,电感L N储能,Δi(t)逐渐增大(支撑电容Cd放电)。
⑵滞环直接电流控制原理图框图如图图3滞环电流比较法控制原理图I N和一个与电压同相的单位正弦信号sinωt相乘得到指令电流I N sinωt,再与检测到的电流i N(t)比较,经过滞环产生PWM调制信号,对各开关器件进行控制,使交流侧的实际电流i N (t)始终跟踪指令电流I N sinωt。
⑶滞环直接电流控制的优缺点滞环电流比较法控制实现很方便,控制简单,且控制误差可由滞环宽度调节,若设计合适可达到较高的控制精度。
但滞环电流比较法控制的不足之处是开关频率不固定,滤波器的设计复杂。
3.2.2,定时瞬时电流控制⑴定时瞬时电流控制工作原理定时瞬时电流控制的原理是在滞环电流控制的基础上,对滞环产生的PWM信号的开关频率进行限制。
在实际控制电路中,只需在滞环电流控制PWM信号端加入一个D触发器,其时钟信号的频率即是PWM信号的开关频率。
⑵定时瞬时电流控制原理图框图图4定时瞬时电流比较法控制原理图⑶定时瞬时电流控制的优缺点定时瞬时电流比较法控制可有效克服滞环电流控制开关频率变化的缺点,使开关频率固定。
但电流跟踪误差受到电网电压影响,且控制电路要比滞环电流比较控制复杂。
3.2.3,瞬态直接电流控制⑴瞬态电流控制工作原理瞬态电流控制基本数学公式为:I N1=K p(U dg-U d)+1/T i∫(U dg-U d)dtI N2= U d I d /U NI N= I N1 + I N2u s (t) = u N (t)-( I N R N sinωt+ I NωL N cosωt)-K p[I N sinωt- i N (t)]⑷式中:K p是调节器的参数与间接电流控制相比,瞬态电流控制引入了瞬态电流反馈,这是为了提高直流侧电压动态相应性能,提高直流侧电压稳定速度。
⑵瞬态直接电流控制原理图框图图5瞬态直接电流控制原理图框图交流侧指令电流幅值I N*,经过两个乘法器转换成输入电流的有功分量i p和无功分量i q,分别经R和ωL环节,转换为电压信号u L(t)。
I N*和一个与电压同相的单位正弦信号sinωt相乘得到指令电流I N*sinωt,与检测到的电流i N (t)减,再经比例放大转换为电压调节信号u i(t)u L(t)、u i(t)再与电源电压u N(t)相减后,便得到给定电压的调制信号u s(t)。
将调制信号u s 与三角波比较,产生控制用的PWM信号,控制主电路的工作。
⑶瞬态电流反馈分析由四象限变流器牵引工况矢量图可知:I N必须与U N同相位,I N的幅值越大,则U L和U R 就越大,因而U s的幅值就越小,U s与U N的相位差ψ就越大;反之,I N的幅值越小,则U L和U R就越小,因而U s的幅值就越大,U s与U N的相位差ψ就越小。
若L↑R↑→U L↑U R↑→U s↓ψ↑→I N↑→I N*sinωt-i N(t)<0→u N(t)- u i(t)>u N(t)→u s(t)↑ψ↓→i N(t)↓若L↓R↓→U L↓U R↓→U s↑ψ↓→I N↓→I N*sinωt-i N(t)>0→u N(t)- u i(t)<u N(t)→u s(t)↓ψ↑→i N(t)↑瞬态电流控制引入了瞬态电流反馈,这是为了提高直流侧电压动态相应性能,提高直流侧电压稳定速度。
⑷瞬态直接电流控制的优缺点瞬态电流控制引入了电流反馈,动态相应性能,直流侧电压稳定速度,控制精度较高,,开关频率固定,且单一桥臂的开关控制互补,便于系统的谐波分析。
3.2.3,预测直接电流控制⑴预测直接电流控制工作原理预测直接电流控制的控制策路为每经过一个PWM 开关周期T S ,使实际电流与指令电流相等。
即在任一PWM 开关周期(t n , t n +T S )内,电流必须满足:i N (t n +T S )= i N (t n )由于变压器绕组的电阻很小可忽略不计,可得瞬态电流控制基本数学公式为: I N1=K p (U dg -U d )+1/T i ∫(U dg -U d )dt I N2=U d I d /U N I N = I N1 + I N2sin s N p N N u u K I t i --(t )=(t )[ω(t )]⑸式中:K p 是调节器的参数K p =L N /T C ,T C 是三角载波的周期将调制信号u s 与三角波比较,产生控制用的PWM 信号,控制主电路的工作。