s120-111报文可能出现的问题
曲轴平衡机S120驱动系统报文通讯分析

曲轴平衡机 S120驱动系统报文通讯分析摘要曲轴平衡机上的S120驱动系统采用西门子370#标准报文来与电源模块通讯,采用自由报文与CU320以及驱动器通讯。
通过对曲轴平衡机S120驱动系统与PLC系统的报文通讯具体分析,来分析报文通讯的应用方法,并在现有报文基础上修正报文BICO互连缺陷及对应的PLC程序,使设备功能更加合理。
关键词:S120驱动系统;报文通讯;控制字;状态字;引言西门子SINAMICS驱动系统是当前在机械加工设备上应用极为广泛的变频器系统,SINAMICS系列中的SINAMICS S120 是集V/F 控制、矢量控制、伺服控制为一体的多轴驱动系统。
要实现PLC控制S120驱动系统实现控制功能必须与其实现通讯, PLC与S120系统通过通讯协议(报文)来实现数据传输。
本文主要从2个方面进行分析S120报文通讯在曲轴平衡机上的实际应用及改进:1.S120报文通讯介绍:标准报文和自由报文规则;2.曲轴平衡机S120系统报文通讯应用分析及现有报文通讯缺陷问题改进优化分析。
1S120系统报文通讯方式介绍设备要实现相应的功能,必须有控制器(PLC)发出相应的指令,S120的控制模块(CU)接收到指令后控制电源模块和电机模块执行对应的运动控制,如电机启动、旋转等。
设备常借助于PROFIBUS-DP来实现SIMATIC S7-300 与SINAMICS S120之间的数据交换,用S7-300来控制S120的运转及读写所需的参数。
S7-300 与SINAMICS S120交换的数据字的数量及各字的含义。
根据不同的应用来选择相应的报文(此处的报文是指通讯过程中的通讯协议)。
S120 中的报文结构分为三类:1、标准报文(1#、2#、3#、4#、5#、6#、7#、20#报文)标准报文是根据Profidrive规范制定的常规报文,当选择标准报文时,内部的过程参数会自动链接。
选择报文在参数P0922中设定,或者在组态驱动时选择。
S120常见故障处理
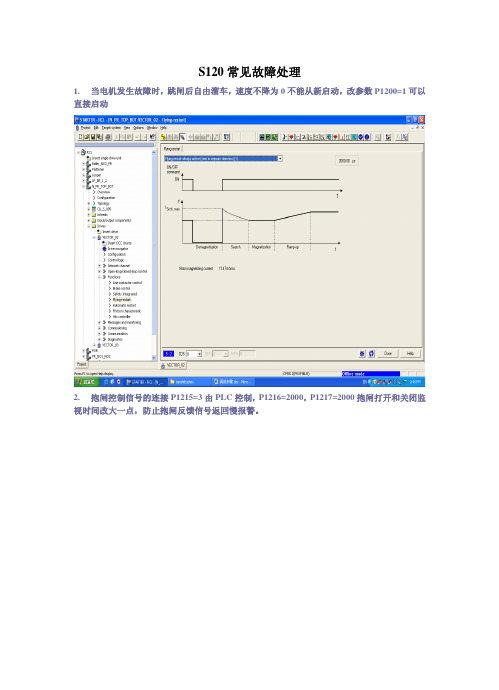
S120常见故障处理1.当电机发生故障时,跳闸后自由溜车,速度不降为0不能从新启动,改参数P1200=1可以直接启动2.抱闸控制信号的连接P1215=3由PLC控制,P1216=2000,P1217=2000抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警。
3.报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值。
改参数:P2175 =2.03%改到1.53% 速度设定监视极限值P2177=10s 改到15s 故障延时时间分两种情况(p1300≥20或p1300<20)p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization.p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode.p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotatingmeasurement and speed controller optimization can be selected.改参数:P1082 =110%改到115% 速度限幅值或者KP增大5.报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报故障。
改参数:P1745=20%改到25% 速度设定监视极限值P2178=10s 改到15s 故障延时时间6.报(A7903)堵转报警,即速度偏差大于设定值经过延时后报故障改参数:P2163 =20%改到30% 速度设定监视极限值P2166=200ms改到400ms 故障延时时间7.急停报F01611(F01600)F30611(F30600),检查急停继电器信号是否正常,并注意端子极性,Motor Module 和Control Unit 各封锁半个桥臂,并且两个信号在相同的延时后(CuP9650,MMP9850)同时收到,不然报故障,如果信号恢复后仍然不能复位,需重新上电。
西门子G120_CU250S-2调试总结之项目实战

G120_CU250S-2调试总结本文讲述应用G120_CU250S-2带台弯数格HFS210S电主轴,调试软件用独立版SCOUT,也可以STARTER和博图中STERDRIVER。
这里要实现的主要功能是在量时完成主轴的定向,在切削时实现主轴的高速转动。
(但在失量时变频器的转速是有限制的。
这就是我要解决的问题)CU250S-2是G120的控制器,需要安装在一个功率单元PM240-2。
目前西门子G120和S120的ACAC系列功率单元基本都用PM240-2。
CU250S-2需要授权卡,完成基本功能用基本授权卡。
完成定位功能需要带EPOS功能的授权卡。
这里需要准备几个手册方便调试。
《G120_CU250S2_EPos_FH10_0415_chs_zh-CHS》《G120_CU250S2_操作说明书》一、 接线根据手册要求连接动力线,制动电阻,和编码器线。
这里需要注意的就是编码器线。
SMC20接法可以参阅S120样本。
下图为本案中的连接方法。
编码器线 电主轴侧 线色,主轴端 线色 SMC20侧 1 1 A+ 绿 32 2 A- 红 43 3 R+ 灰 174 7 0V 黄 25 8 KTY84+ 白 136 9 KTY84- 黑 257 10 +5 棕 18 11 B+ 蓝 69 12 B- 紫 710 13 R- 粉 1815 0 红蓝 1616 5+ 灰粉 1417 shield12芯带屏蔽 12芯 实验中结论是编码器线用屏蔽电缆非常重要,否则会出现各种编码器类报警,有关于AB的有关于R的,接上屏蔽且屏蔽接地基本解决一切编码器报警。
另外SM20端16和14一定要接,电主轴端15/16在内部是和4/7相连的,可以把电主轴的15/16与SMC20的16/14相连。
SMC20的16/14是确认编码器是否正常上电,电压是否在正常范围,若遇到没有编码器反馈的可以把SMC20的16/14与电源智短上。
以上确认后基本上不会因为线路问题出报警。
S120控制单元cu320调试纪录
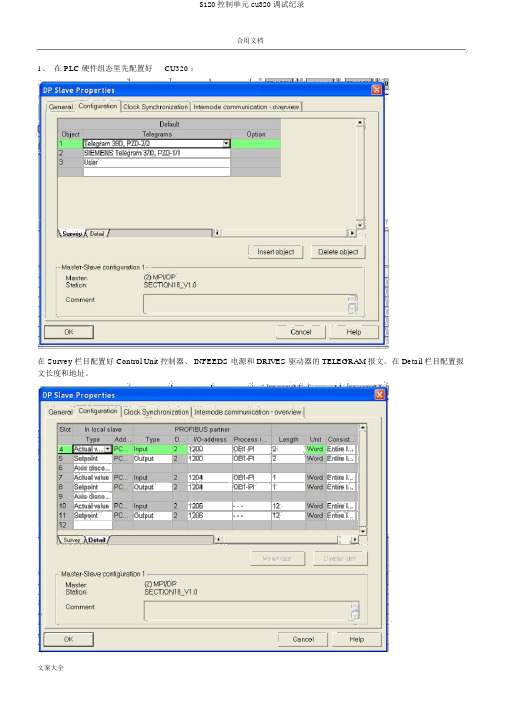
合用文档1、在 PLC 硬件组态里先配置好CU320 :在 Survey 栏目配置好 Control Unit 控制器、 INFEEDS 电源和 DRIVES 驱动器的 TELEGRAM 报文。
在 Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7 中会自动生成一个伺服配置:3、双击在 STARTER 中翻开所配置的伺服,选择ONLINE, 在线前需要将CU320 的 DP 拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo 后会自动生成一个根本配置〔包括Control Unit 控制器、 INFEEDS 电源和 DRIVES 驱动器 ,参数是自动读取上来的〕,第一需要对INFEEDS和DRIVES 配置 CONFIGURATION〔默认既可〕:5、尔后依照实质工程需要可能需要更正INFEEDS 和 DRIVES 中的一些参数EXPERT —-EXPERT LIST:INFEEDS:P10 –0 READY;1 — QUICK COMMISSIONING(更正某些参数时需要在 1 状态,更正完成后需要改为 0), P210 Drive unit line supply voltage驱动器实质供电电压可能和选型不一致。
DRIVES:Change parameter p1821 if need to change direction , p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust , p2585 jog speed若是采用手动方式,需要在Configure drive unit窗口中渐渐配置,并更正以上的参数。
6、报文配置 (包括控制器、电源和驱动器): COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
西门子S7-1200 1500 FB284控制S120实现基本定位功能说明书
/CN/view/zh/109765580C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1概述 ............................................................. 32SINA_POS(FB284)介绍 .. (33)SINA_POS 功能说明 ................................................. 63.1概述 ........................................................ 63.2功能块的运行模式介绍 ........................................ 63.2.1运行条件 .................................................... 63.2.2相对定位运行模式 ............................................ 63.2.3绝对定位运行模式 ............................................ 73.2.4连续运行模式(按指定速度运行) ................................ 83.2.5主动回零 .................................................... 93.2.6直接设置回零位置 ........................................... 103.2.7运行程序段 ................................................. 103.2.8按指定速度点动 ............................................. 113.2.9按指定距离点动 ............................................. 123.2.10运行中回零(被动回零) ....................................... 123.3基于ModePos 值的运行模式切换说明 (12)4项目配置 ........................................................ 134.1S120项目配置要点 ........................................... 134.2S7-1500项目配置步骤 (17)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1概述S7-1200/1500可以通过PROFINET 通信连接SINAMICS S120伺服驱动器,PLC 通过西门子提供的驱动库中的功能块FB284可实现S120的基本定位(EPOS )控制。
SINAMICS-S120-110报文

1 2 3 4 5
接近开关
1
接近开关
2
1
2
0
r51.1 r51.2 r51.3 r51.4 r896.0 r1406.8 r835.0 2089[2]
9
p2654
r2050 bit
2089[0] r899.0 r899.1 r899.2 r2139.3 r899.4 r899.5 r899.6 r2139.7 r2684.8 r899.9 r2684.10 r2684.11 r2684.12 r2199.0 r2670 r2670.0 r2670.1 r2670.2 r2670.3 r2670.4 r2670.5 r2670.15 r2683 r2683.0 r2683.1 r2683.2 r2683.4 r2683.5 r2683.6 r2683.7 r2683.8 r2683.9 r2683.10 r2683.11 2089[1] r51.0
r2521
DDS有效
位DDS有效
1
位DDS有效
2
位DDS有效
3
位驻留轴生
4
效运行到固
定电档机块切有换
有效
状实态际字位3置
值
1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否
1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否
回原点参考凸轮
PosSTW.5
S120控制单元cu320 调试纪录
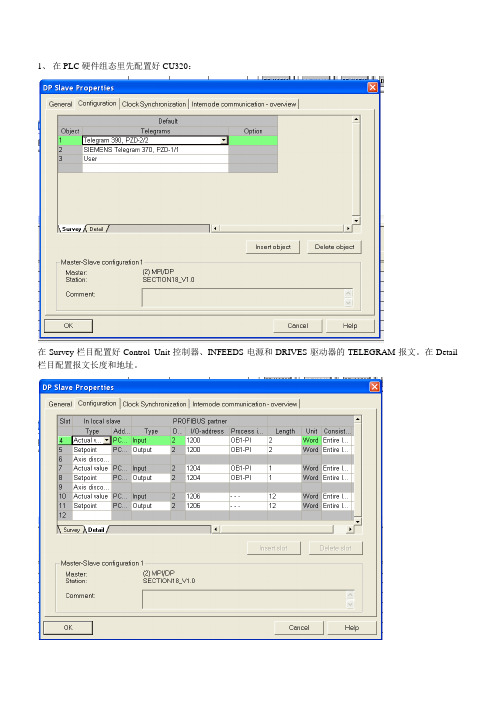
1、在PLC硬件组态里先配置好CU320:在Survey栏目配置好Control Unit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括Control Unit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS 和DRIVES配置CONFIGURATION(默认既可):5、然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERT LIST: INFEEDS: P10 –0 READY;1—QUICK COMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0), P210 Drive unit line supply voltage驱动器实际供电电压可能和选型不一致。
DRIVES: Change parameter p1821 if need to change direction,p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust,p2585 jog speed如果采用手动方式,需要在Configure drive unit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:COMMISSIONING – CONTROL PANEL(必须在ONLINE)9、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCE POINT SET左边状态灯变成绿色。
s120使用心得

S120调试常见问题汇总项目配置目前做S120项目配置时有starter和scout这2种常用软件,版本最好为V4.1以上,starter使用较多,现只对starter进行叙述。
打开starter软件后出现如下画面:点击project选项后选择new或new with wizard新建一个项目如果选择通过向导新建项目时会出现如下窗口1为离线配置项目,2为在线配置,3为打开已有项目如选择2在线配置时,先要将适配器连接至S120控制器,然后按照向导提示执行配置即可完成,适配器连接S120具体过程可参看S120调试手册。
选择1或选择new离线新建一个项目时,输入完项目名称和存储路径后会出现如下图示:点击插入一个控制单元后弹出如下窗口:1选择设备系列,2选择具体设备和型号,3版本号,4通讯方式和地址。
本例选择的是CU320控制器,配置完成后出现如下窗口:在驱动器选项下点击插入驱动器,在驱动器类型里选择类型:servo伺服和vector矢量,其他选项可自行填写。
如选择伺服控制后会出现如下窗口:图1在功能选择中,本例用到基本定位功能,如有其他要求,可选择相应选项,选择不同选项后会对后面配置有影响。
可参看S120调试手册。
控制类型选择带编码器速度反馈。
点击下一步后出现功率单元的配置如图:按照实物选择相应的电压等级,冷却方式和具体型号,配置完后出现如下窗口选择跟功率单元相匹配的适配器型号,此选项受前面控制器型号影响略有不同。
然后进行电机配置,由于是伺服控制,并选用西门子自己的电机,故选择带DRIVE-CLiQ 接口的电机,如是其它电机则选择相应的电机型号,然后对报闸控制进行设定。
下一步对编码器进行设定1为西门子伺服电机自带编码器,带drive-CliQ通讯口,上面配置电机时已设定,故系统自认定,选项灰色不可改变。
2为自定义编码器,如有需要可勾选,并在3处定义编码器具体型号。
并在下一选项中选择哪一编码器做定位控制用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这个主要是那个报文的起始地址,起始地址可能有些不同,可以在PLC的硬件组态里可以看到。
比如PLC 硬件组态的输出的起始地址是334,到357结束,那么PQW334就是111报文的STW1,PQ334.0-PQ335.7的每一位跟STW1的每一位对应PQW336就是对应POS_STW1,一次往下。
一直到PQW356对应最后一个控制字MDI-DEC。
输出的也是一次对应状态字,ZSW1,POS_ZSW1.........WARN_CODE
可能出现的问题:
1. S120的基本定位功能必须在项目离线的情况下进行配置,步骤为离线、配置、驱动配置、激活基本定
位、选择111报文、报文结构、传输到硬件组态。
配置结束后在线,连接驱动器。
读参数r108.3=1,r108.4=1就表示基本定位功能已激活。
2. 硬件限位的设计牵涉到许多方面,有安全回路设计的硬件限位,只能采用强制短路开关暂时短接限位
开关,在此状态下驱动只能通过低速点动退出硬限位
3. 请教个问题,一般是怎么退出硬限位的呀?复位故障后反向转即可.
4. 如果你选择的是s120 的111 报文的话,s120 发给plc 的第6和7个字就是位置实际值,不过它
的单位是LU,负载转一圈的LU值可以在参数p2506 中查到,你要转换成角度值需要自己做一下转换;s120 发给plc 的第8和9个字就是速度实际值。
5. 用111报文使用MDI定位方式作绝对位置控制选择连续数据传输方式时,如何确定定位动作已完成?
可以查看状态位r2683.3,到达位置后其值为1,轴在运行时其值为0请教个问题,为提高定位的动态特性,如何做位置环的优化。
6. 跟速度环的优化没有什么区别,调节比例增益和积分时间,使位置实际值尽可能跟随位置给定,且超
调不要太大。