“开环控制”与“闭环控制”的区别
自动控制系统中的开环与闭环控制

自动控制系统中的开环与闭环控制自动控制系统是一个由传感器、控制器和执行器组成的系统,用于监测和调节特定过程的运行。
在自动控制系统中,开环控制和闭环控制是两种常见的控制策略。
本文将介绍开环控制和闭环控制的基本概念、原理和应用。
一、开环控制开环控制是一种基本的控制策略,它的原理是根据已知输入和系统的数学模型来预测输出,并通过适当的控制手段实现所需的输出。
在开环控制中,控制器不会根据实际输出对控制进行调整。
因此,开环控制对外部干扰和系统参数变化是非常敏感的。
开环控制适用于稳定过程和可预测的环境。
一些常见的开环控制的应用包括恒温控制器和定时器等。
例如,当我们使用微波炉加热食物时,设置加热时间和功率,微波炉会按照我们的设定进行加热,而不会根据食物的实际温度调整加热功率。
开环控制的主要优点是简单易实现,适用于某些特定的稳定过程。
然而,它的缺点是对于系统参数的变化和外部干扰非常敏感,容易导致输出偏差。
二、闭环控制闭环控制是一种根据实际输出调整控制的策略。
在闭环控制中,系统会通过传感器实时监测实际输出,并与期望输出进行比较。
根据比较结果,控制器会相应地调整控制信号,以实现期望输出。
闭环控制包括反馈环节和控制环节。
反馈环节负责收集实际输出信息,并将其与期望输出进行比较。
控制环节根据比较结果生成控制信号,并将其发送给执行器,以调整系统的行为。
闭环控制在很多自动控制系统中得到广泛应用。
例如,汽车的巡航控制系统利用车速传感器和目标速度设定来实现自动控制。
系统会不断监测车速,并根据设定目标速度调整油门位置,以使车辆保持稳定的速度。
闭环控制的优点是对于系统参数的变化和外部干扰具有一定的鲁棒性,可以实现更精确的控制。
然而,闭环控制系统的设计和调试相对较复杂,需要考虑传感器的准确性、控制器的稳定性等因素。
结论开环控制和闭环控制是自动控制系统中常见的两种控制策略。
开环控制简单易实现,但对于系统参数的变化和外部干扰非常敏感。
闭环控制可以根据实际输出进行调整,具有较好的鲁棒性和控制精度。
开环控制系统与闭环控制系统的区别及相关的实例
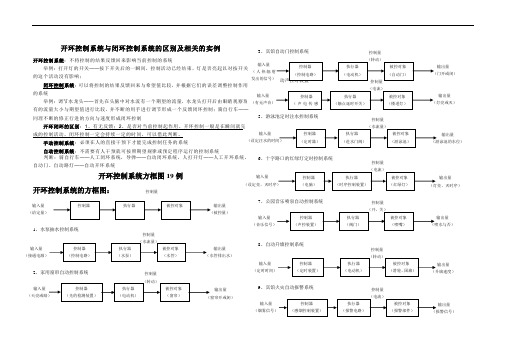
开环控制系统与闭环控制系统的区别及相关的实例开环控制系统:不将控制的结果反馈回来影响当前控制的系统举例:打开灯的开关——的这个活动没有影响; 闭环控制系统:可以将控制的结果反馈回来与希望值比较,的系统 举例:调节水龙头——有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车同理不断的修正行进的方向与速度形成闭环控制 自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统 判断:骑自行车——人工闭环系统,导弹——自动闭环系统,人打开灯——人工开环系统,自动门、自动路灯——自动开环系统 开环控制系统方框图19例 开环控制系统的方框图: 1、水泵抽水控制系统 2、家用窗帘自动控制系统3、宾馆自动门控制系统 5、游泳池定时注水控制系统6、十字路口的红绿灯定时控制系统7、公园音乐喷泉自动控制系统8、自动升旗控制系统9、宾馆火灾自动报警系统 控制量控制量控制量控制量 控制量 控制量控制量 控制量 输入量 (定时时间) 控制量10、宾馆自动叫醒服务系统11、活动猴控制系统 12、公共汽车车门开关控制系统13、家用缝纫机缝纫速度控制系统14、普通电风扇控制系统15、普通全自动洗衣机控制系统16、手电筒控制装置 17、宾馆自动门加装压力传感器防意外事故自动控制系统 18、可调光台灯控制系统19、电吹风控制系统控制量 控制量(压缩空控制量控制量控制量 控制量 控制量控制量控制量闭环控制系统方框图12例闭环控制系统的方框图:1、投篮2、供水水箱的水位自动控制系统3、加热炉的温度自动控制系统4、抽水马桶的自动控制系统5、花房温度控制系统给定量被控量给定量被控量给定量被控量给定量被控量给定量给定量 被控量控制量6、夏天房间温度控制系统7、家用电饭锅保温控制系统8、家用电冰箱温度控制系统9、宾馆使用多台热水器串联电辅助加热自动控制系统10、粮库温、湿度自动控制系统11、自动电热水壶控制系统给定量被控量房内实被控量给定量 控制量被控量 冰箱实给定量 给定量被控量—80℃) 控制量被控量 粮库内给定量(设定控制量给定量控制量。
力学系统的开环控制与闭环控制比较

力学系统的开环控制与闭环控制比较在控制系统中,开环控制和闭环控制是两种常见的控制方式。
它们在力学系统中的应用广泛,但各自具有不同的特点和适用范围。
本文将对开环控制和闭环控制进行比较,探讨它们的优缺点以及适用场景。
开环控制是一种基本的控制方式,它通过输入控制信号直接作用于被控对象,而不考虑输出结果对控制信号的影响。
开环控制的特点是简单、直接,适用于一些简单的力学系统。
例如,当我们开车时,我们可以通过踩油门来控制车辆的速度。
在这种情况下,我们只需要根据需要调节油门的大小即可,不需要考虑车辆的实际速度。
然而,开环控制也存在一些问题。
首先,它对被控对象的变化不敏感。
在实际应用中,被控对象的参数可能会发生变化,例如温度、湿度等,这些变化会导致开环控制的输出结果与期望值产生偏差。
其次,开环控制无法纠正由外界干扰引起的误差。
例如,当我们在开车时遇到风的阻力时,开环控制无法自动调整油门的大小来保持车速恒定。
与开环控制相比,闭环控制可以更好地解决这些问题。
闭环控制通过不断地监测被控对象的输出结果,并与期望值进行比较,从而调整控制信号。
在前面提到的开车例子中,闭环控制可以通过车速传感器实时监测车辆的速度,并根据实际速度与期望速度的差异来调整油门的大小。
这样,无论外界条件如何变化,闭环控制都能够自动调整控制信号,使得输出结果更加稳定和准确。
闭环控制的优点不仅仅体现在对被控对象变化的敏感性上,还在于它能够纠正由外界干扰引起的误差。
闭环控制通过不断地监测输出结果与期望值的差异,并通过反馈机制来调整控制信号,从而减小误差。
这使得闭环控制在一些对精度要求较高的应用中得到广泛应用,例如航空航天、机器人等领域。
然而,闭环控制也存在一些问题。
首先,闭环控制的设计和调试相对较为复杂,需要对系统的动态特性进行深入分析和建模。
其次,闭环控制的实时性和稳定性对控制器的性能和参数选择有较高的要求。
如果控制器的响应速度过慢或者参数选择不当,闭环控制可能会引起系统的振荡或不稳定。
闭环数控的控制原理,它与开环数控的区别

闭环数控的控制原理,它与开环数控的区别
摘要:
一、闭环数控与开环数控的区别
1.控制原理
2.系统结构
3.性能与应用领域
正文:
闭环数控与开环数控在控制原理、系统结构以及性能与应用领域等方面存在显著区别。
首先,从控制原理上看,闭环数控采用闭环控制方式,而开环数控采用开环控制方式。
闭环控制是指控制器输出信号经过执行器作用于被控对象后,将实际输出与期望输出进行比较,然后根据误差调节控制器输出,从而实现对被控对象的精确控制。
相比之下,开环控制则是直接根据控制器输出信号来控制被控对象,不进行实时的反馈调节。
其次,在系统结构上,闭环数控系统通常由传感器、控制器、执行器和被控对象等组成,而开环数控系统的结构相对简单,主要由控制器、执行器和被控对象组成。
闭环数控系统通过传感器实时监测被控对象的状态,并将信息反馈给控制器,实现对控制器的实时调整,从而提高控制精度。
而开环数控系统则缺乏这种实时反馈机制,控制精度相对较低。
最后,在性能与应用领域方面,闭环数控具有较高的控制精度和稳定性,适用于对精度要求较高的场合,如高精度加工、机器人控制等。
而开环数控由
于控制精度较低,主要应用于对精度要求不高的场合,如普通机床、简单的自动化设备等。
总之,闭环数控与开环数控在控制原理、系统结构和性能与应用领域等方面具有显著区别。
伺服系统的开环控制与闭环控制
伺服系统的开环控制与闭环控制伺服系统是一种能够对输出进行精确控制的系统。
在伺服系统中,输出通常指的是某种物理量,例如位置、速度或者力。
开环控制和闭环控制是伺服系统两种主要的控制方式。
一、开环控制开环控制又称为非反馈控制。
在该模式下,控制器没有反馈被控制量的信息。
相反,控制器根据已知的输入信号和系统的静态和动态特性进行计算,输出控制信号。
由于开环控制没有考虑系统的实际输出值,所以结果可能会受到许多外部因素的影响而导致不稳定,例如系统的负载或环境温度变化。
开环控制通常应用于简单的系统或者那些对输出精确度要求不高的系统中。
二、闭环控制闭环控制又称为反馈控制。
在该模式下,控制器通过传感器获取被控制量的实际输出值,并将其返回至控制器,以便计算误差并相应地调整输出信号。
闭环控制通常比开环控制更加精确,因为它可以对实际输出值进行即时调整。
当然,在闭环控制模式下,系统所需的硬件和软件成本也更高。
闭环控制通常应用于对输出精度要求高且稳定性要求高的系统中。
三、开环控制和闭环控制的比较总的来说,开环控制和闭环控制各有优缺点。
开环控制通常比较简单,并且可以为系统提供基本的控制。
但是,由于其不考虑实际输出值的变化,所以其控制精度较低,对于环境变化比较敏感。
闭环控制虽然成本高,但其控制精度相对较高,可以从控制误差中学习并自我调节。
此外,由于它可以实施实时调整,所以闭环控制通常比开环控制更稳定。
四、结论在伺服系统中,开环控制和闭环控制是两种常见的控制模式。
适合哪种控制模式应该根据具体情况而定,包括对所需控制的输出精度要求、系统成本、环境条件等各种因素的影响。
闭环控制与开环控制

闭环控制与开环控制控制系统在工业自动化领域中起着至关重要的作用,其中闭环控制和开环控制是两种常见的控制策略。
本文将介绍闭环控制和开环控制的基本概念、原理及其应用,并探讨两者的优缺点以及在实际应用中的选择。
一、闭环控制闭环控制,又称反馈控制,是一种通过测量输出并将其与期望值进行比较,然后根据差异来调整输入,以实现系统稳定运行的控制方式。
闭环控制系统一般由传感器、控制器和执行器组成。
其基本原理是通过不断监测和调整系统输出,使其接近或稳定于期望状态。
闭环控制可以提供更稳定、更精确的控制效果。
通过实时的反馈信息,闭环控制可以补偿外部环境变化和系统误差,使系统更具鲁棒性。
闭环控制广泛应用于诸多领域,如温度控制、位置控制、速度控制等。
在这些应用中,闭环控制可以实现精确的控制目标,并对系统的稳定性和鲁棒性有较高的要求。
然而,闭环控制也存在一些缺点。
首先,闭环控制系统的设计和调试较为复杂。
其次,闭环控制需要传感器对系统的输出进行实时监测,从而增加了系统的成本和复杂度。
此外,闭环控制往往需要较快的反应速度,因此需要较高的计算能力和实时性。
二、开环控制开环控制,又称前馈控制,是一种根据预先设定的输入信号来控制系统的运行,而无需实时的反馈信息。
开环控制系统一般由输入设备、控制器和执行器组成。
开环控制通过预先确定的输入信号来指导系统运行,而忽略了系统输出与期望值之间的差异。
开环控制具有设计简单、调试容易的优点。
由于不需要实时的反馈信息,开环控制可以在很多应用中实现较低成本和复杂度的控制。
因此,在一些对控制精度和稳定性要求不高的应用中,开环控制是一个有效的选择。
然而,开环控制也存在一些限制。
首先,开环控制系统对外部环境的干扰和系统误差较为敏感,无法自动调整。
其次,由于没有反馈信息,开环控制无法实时纠正系统偏差,导致输出与期望值之间可能存在较大的误差。
因此,在一些对控制精度和稳定性要求较高的应用中,开环控制无法满足需求。
三、闭环控制与开环控制的应用闭环控制和开环控制在不同的应用场景中表现出各自的优势。
开环控制系统和闭环控制系统的区别与相关

举例:打开灯的开关一一按下开关后的一瞬间,控制活动已经结束,灯是否亮起
以对按开关的这个活动没有影响;
闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调 整控制作用的系统
举例:调节水龙头 一一首先在头脑中对水流有一个期望的流量,水龙头打开后由 眼睛观察现有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭
■
(定时器)
■
(进水门阀)
■
(游泳池)
(游泳池的水位)
(电流)
输入量
控制器
■
执行器
4
被控对象
输出量
(设定亮、灭时序)
(电脑)
(时序控制装置)’
■
(红绿灯)
(灯亮、灭时序)
开环系统,自动门、自动路灯 一一自动开环系统
开环控制系统方框图
3、宾馆自动门控制系统
4、楼道自动声控灯装置控制量
(电流)
输入量
ih-
控制器
fa-
执行器
■
被控对象
输出量
(有无声音)
■
(声电传感
(触点延时开关)
■
(楼道灯)
(灯亮或灭)
(水流量)
输入量
■
控制器
ih-
执行器
■
被控对象
输出量
.
(设定注水的时间)
环控制;骑自行车 同理不断的修正行进的方向与速度形成闭环控制
开环闭环的区别 :1、有无反馈;2、是否对当前控制起作用。开环控制一般是在
瞬间就完成的控制活动,闭环控制一定会持续一定的时间,可以借此判断。
手动控制系统:必须在人的直接干预下才能完成控制任务的系统 自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统 判断:骑自行车 一一人工闭环系统,导弹一一自动闭环系统,人打开灯一一人工
自动控制原理中开环和闭环的区别

自动控制原理中开环和闭环的区别:1、工作原理开环控制系统不能检测误差,也不能校正误差。
控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。
因此,一般仅用于可以不考虑外界影响,或惯性小,或精度要求不高的一些场合。
闭环控制的优点是充分发挥了反馈的重要作用,排除了难以预料或不确定的因素,使校正行动更准确,更有力。
但它缺乏开环控制的那种预防性。
如在控制过程中造成不利的后果才采取纠正措施。
因此,一般广泛应用于对外界环境要求比较高、高精度场合。
2、结构组成开环系统没有检测设备,组成简单,但选用的元器件要严格保证质量要求。
闭环系统具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
3、稳定性开环控制系统的稳定性比较容易解决。
闭环系统中反馈回路的引入增加了系统的复杂性。
概念:开环控制是指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的控制作用发生影响,不具备自动修正的能力。
其输入可分为给定值输入和干扰输入。
闭环控制是将输出量直接或间接反馈到输入端形成闭环、参与控制的控制方式。
若由于干扰的存在,使得系统实际输出偏离期望输出,系统自身便利用负反馈产生的偏差所取得的控制作用再去消除偏差,使系统输出量恢复到期望值上,这正是反馈工作原理。
开环与闭环控制系统的优缺点:开环控制系统的优点是结构简单,比较经济。
缺点是无法消除干扰所带来的误差。
同开环控制系统相比,闭环控制具有一系列优点。
在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。
因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。
为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
开环控制与闭环控制的区别
“开环控制”与“闭环控制”的区别就在于控制系统中有无反馈环节,所谓闭环控制就是存在反馈环节的控制。
这样的系统能够适时地检测控制的输出结果,并将检测到的信息通过反馈环节反映到输入端,调整输入量,达到修正控制误差、提高控制精确度的目的。
反馈技术被广泛应用在各种需要精确控制的系统中,尤其是电子控制系统,比如:各种放大电路中的增益控制;环境的温度、湿度、水位、压力的控制;机械结构的位置控制、速度控制等等。
因此常常使人觉得:闭环控制是复杂的、精确的、自动的控制方式,而开环控制相对的简单、粗糙和非自动。
这种感觉常常造成初学者在分析系统时的误判,需要特别注意。
以普通家用压力锅的温度控制过程为例,在密闭状态下,锅内的温度与压力呈对应关系。
加热锅体,锅内温度逐步升高,锅内压力也随之升高;当锅内的压力达到设定值时,高压将顶开压在排气阀上的重锤,排出蒸汽,使锅内压力降低,压力的降低又造成温度的降低。
由于重锤的重量是恒定,因此当温度达到设定值之后,加热量和排气量将呈动态平衡,锅内压力保持在高于大气压力的一个恒定值上,锅内温度也保持在高于常压水的沸点温度的一个恒定值上(一般为110℃左右),不再继续升高。
过程如下图所示:
分析这样一个控制问题,首先要界定所考察的系统范围。
从整体效果上看,该控制过程的输入量是加热锅体,加热锅体导致的三个结果:锅体升温、锅内升压以及排气孔排气,都是输出量,而输出量并未反馈回来影响输入量,因此它是一个开环控制系统。
而更细致的分析,应该把升温过程与恒压/恒温过程分别进行分析。
分析时考察的系统范围不同,结论也不同。
①压力锅的加热、升温、升压过程
把加热炉具与压力锅看成一个系统,压力锅体因外部加热而升温,分析加热的过程。
输入量——接通电源或点火,输出量——锅体升温、锅内升压以及排气孔排气。
控制过程如下图所示,与用炉火加热普通锅体的过程相同,属于开环自动控制。
②压力锅的恒压、恒温控制过程
压力锅能够保持锅内压力与温度恒定,主要是依靠了压在排气阀上的重锤的作用,因此还可以分析重锤对锅内压力的控制过程。
输入量——重锤的重量,输出量——锅内气体的压力(温度),在输入端重锤重力与锅内压力(反馈量)进行比较,力的差值通过重锤控制排气孔的排气量,该过程属于闭环自动控制过程。
类似的自动控制例子还很多,比如:山地梯田中的水位控制,从山头到山脚梯状层叠的平面稻田,水流自上而下逐层灌溉着每一块田地,稻田中水位的高低由田埂上的排水口的高度决定,每一块稻田的水位都可以单独的设定。
只要山头入水口的水流供给量保持在一定的范围内,无论蒸发量多或少,都能够确保稻田中基本恒定的水位。
几千年来,劳动人民就是依靠这样一种简单的梯田结构,解决了稻田的自动灌溉问题,从控制设计的角度来看,梯田灌溉的水位控制没有使用任何反馈调节的环节,因此也属于开环控制。
简单的开环控制,应用得当,通常能够达到理想的自动控制效果。
反之,复杂的闭环控制也未必都属于自动控制。
汽车的驾驶就是一个常见的实例:汽车沿着道路行驶,必须有人的操控,从控制的角度看,属于人工控制,这时我们是将人与车作为一个整体,看成一个系统。
驾驶员通过操控方向盘、油门、刹车等机构,控制车辆行驶的状态;同时,驾驶员还通过视觉,查看车辆与前方道路或障碍物的位置关系信息,根据这一信息不断修正自己的操作,使车辆按照预定的路线轨迹行驶。
在这一过程中,驾驶员通过视觉获取的信息就是反馈量,因此属于闭环控制。