矿用电机车控制系统的设计
矿用电机车无人安全驾驶技术研究
矿用电机车无人安全驾驶技术研究
王盼盼
【期刊名称】《西部探矿工程》
【年(卷),期】2024(36)3
【摘要】为使矿用电机车实现无人安全驾驶,研究了矿用电机车无人驾驶技术,设计了矿用电机车无人驾驶系统的整体结构,该系统主要由网络通信子系统、运输监控子系统、远程驾驶子系统以及电机车测控子系统四部分组成,介绍了各部分的功能,并重点研究了运输监控子系统与远程驾驶系统的构建,通过让这些子系统密切配合,矿用电机车实现了无人安全驾驶,进一步提高了矿用电机车的自动化智能化水平,促进了矿井运输的减人增效。
【总页数】4页(P46-49)
【作者】王盼盼
【作者单位】山西省长治市潞安化工集团漳村煤矿
【正文语种】中文
【中图分类】TD26
【相关文献】
1.无人驾驶技术在矿用电机车的应用研究
2.无人驾驶矿用电机车问世
3.5G矿用电机车无人驾驶系统研究
4.无人驾驶技术在矿用电机车中的实施与应用
5.地采矿山翻车机卸矿模式有轨电机车无人驾驶系统技术研究
因版权原因,仅展示原文概要,查看原文内容请购买。
矿用蓄电池电机车交流DTC调速系统性能及效益分析

按定子磁场定 向的矢量控制 , 是近 2 年来发展起来 0 的一 种具 有高 动态 性能 的交 流变频 调速 系统 。
£、, ——分别为定子等效绕组 的 自 、 、 感 转 子等效绕组的自感及定子与转子等效绕组间的互感 。 脚注 O和 表示对应变量在 O轴和卢轴的投影 l l
中图分类号 :D 2 . T 54 3 文献标识码 : B 文章编 号 : 0 — 84 2 1)6— 09— 2 1 1 07 (0 10 08 0 0
Pe f r n e a d Ec omi ay fMiE L c mo ie7 e o ma c n - on O r O iC om An lss o n L o t e’ 0n c v i J M e o v S
1 D C控 制原 理 T
L + L i i
i + i
=
=
L i +Li
Lm +Lr i i
() 1
=
直 接转 矩 控 制 ( T Drc Tru ot 1 , D C, i t oq eC nr ) 即 e o
式中: ——分别为定子侧电流和磁链 ; 、
l o t e nrd cstep n il o i c ru o t l( T ,a d aa zstesp r ri fA T o mo v.It u e r c e fdr t oq e cnr D C) n n l e h u ei ie o C D C c i o h i p e t o y ots
分量 。
11 直接转矩控制的模型算法 .
直接转矩控制理论摒弃矢量控制技术过于繁杂 的解耦思想 , 借助三相定子电压和电流, 在静止坐标
矿用电机车手轮闸瓦制动连杆机构稳健设计

后, 考 虑转 动 副 间隙对 该机 构进 行运 动 学分 析 , 建立 计 入 转 动 副模 型 的 闸 瓦制 动连 杆 机 构运 动 学模 型. 最
后, 以机构 杆 长为设 计 变量 , 以转动 副 间隙 、 间 隙副接 触角 和杆 件加 工误 差为 噪声 因素 , 建 立 以闸 瓦制 动距 离误 差 均值 和标 准 差最 小化 为 目标 的矿用 电机 车手 轮 闸瓦制 动 连 杆机 构 参 数稳 健 设 计优 化 模 型 , 并运 用 遗 传算 法 和蒙 特卡 洛模 拟法 对参 数进 行 稳健设 计 与优 化.
前提 下 , 能 显 著 降 低 闸 瓦制 动 过 程 的 不确 定性 , 对 提 高矿 用 电 机 车 手 轮 闸 瓦制 动 连 杆 机 构 的 设 计 质 量 具 有 重 要 意 义 .
关键词 : 稳健设计 ; 连 杆机 构 ; 制 动 系统 ; 矿 用 电机 车
中图分类号 : T P 0 2 8 . 8
( 湖南 科 技 大 学 机 械 设 备 健 康 维 护 湖南 省 重 点 实 验 室 , 湖南 湘潭 4 1 1 2 0 1 )
பைடு நூலகம்
摘 要 : 以矿 用 电机 车 手 轮 闸 瓦 制 动 连 杆 机 构 为 研 究对 象 , 应 用 遗 传 算 法 和 蒙特 卡 洛 模 拟 法 对 其 参 数 进 行 稳 健 设 计 与
连杆 机构 的运 动精 度 .
笔者 在 上述研 究 工作 的基 础上 , 以矿用 电机 车 手 轮 闸 瓦制 动 连杆 机 构 为研 究 对 象 , 首先, 拟对 矿 用 电
机 车 手 轮 闸 瓦制 动 连 杆 机 构 的运 动 过 程进 行 分 析 , 建 立 理想 状 况 下 的 闸 瓦制 动连 杆 机 构运 动 学模 型. 然
矿用直流电机车调速系统设计与实现(软件)

中国矿业大学本科生毕业设计姓名:学号:学院:专业:设计题目:矿用直流电机车调速系统设计与实现(软件)专题:指导教师:职称:2010 年6月中国矿业大学毕业设计任务书学院专业年级学生姓名任务下达日期:毕业设计日期:毕业设计题目:矿用直流电机车调速系统设计与实现(软件)毕业设计专题题目:毕业设计主要内容和要求:1:实现矿用直流电机车调速的生产实践要求。
2:设计与实现基于单片机的矿用直流电机车调速系统主电路设计。
要求电机选型,功率器件选型等.3:设计与实现基于单片机的矿用直流电机车调速系统控制电路软硬件设计,能够具备良好的人机对话,实现调速,换向,保护,报警等功能4:翻译电气自动化英文资料一篇(近5年内)以上1-4要求的软件部分院长签字:指导教师签字:指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计答辩及综合成绩摘要本文针对矿用蓄电池机车目前采用的串电阻调速和可控硅直流脉宽调速存在的缺点,提出了采用新型智能功率模块(IPM)作为斩波器的调速方法。
该方法不仅克服了串电阻有级调速的缺点,提高了斩波频率实现平滑调速,而且节约了能源。
同时系统采用电流、转速双闭环PI调节的控制方案也大大改善了系统的性能。
本文阐述了蓄电池机车斩波调速的工作原理,给出了系统的主电路拓扑分析其工作原理,得出了牵引电机的牵引和制动特性,同时给出了主电路参数选择。
本系统选用了智能功率模块(IPM)代替了老式可控硅斩波器件,斩波频率可达2KHZ,由于其集成了驱动和各种保护大大简化了硬件电路,提高了系统性能而且控制方便。
矿用架线式电机车变频控制装置的设计

矿用蓄电池电机车交流变频调速系统的硬件设计与应用

该 电压 低 于 其 额 定 值 8 % 时 , S 5 D P控 制 器 自动 切 除 蓄
电池 组 , 停 电 机 车 。 并
作者简介 : 马琳 (9 1 ) 女 , 17 一 , 辽宁义县人 , 河南义马煤业集团股份有限公司机电处工程师 , 从事矿井机电技术管 理工作 ; 王福忠 (9 1 ) 16 一
摘要 : 目前矿 用蓄 电池 电机 主要 采 用直流 串激 电动 机 作为 牵 引 电动机 , 在调速 性 能差 、 存 能耗 大 、 电池 寿 命短 、 机械 磨 损 大等缺 点 。为 此 , 设计 了矿 用蓄 电 池 电机 车 的 交流 变频调 速 系统 , 出 了 以永磁 同 提 步 电动 机作 为 牵 引 电动机 , D P M30 2 1 为控 制 器 , 以 ST 2 F 82作 实现 了 变频 矢量控 制 。侧 重介 绍 了变频 调 速 系统 的基 本原 理 、 变频 器主 回路 、G T功 率模 块 的驱动 电路 和控 制单元 。 应 用表 明 , 交流永 磁 IB 用 电动机 取代 直 流 电动 机 , 并采 用 变频调速 , 高 了电机 车的调 速性 能和 运行 安全性 , 提 降低 了能耗 , 长 延
的 起 动 和 调 速 还 采 用 串 接 电 阻 调 速 , 成 大 量 的 电 能 消 造
( ) 用 能 量 反 馈 发 电制 动 、 气 制 动 、 械 闸 瓦 1采 空 机 手 制 动 等 制 动 方 法 , 证 矿 用 蓄 电 池 电 机 车 的 安 全 运 保
行。
( 使 用 两 台 A 10 5 W 的 矿 用 隔 爆 型 三 相 交 2) C0 V1 k
置 , 效 地 保 证 了 系统 的 安 全 性 。 有
矿用电机车防撞系统的研究

K y rs: mielc moiei a t ol in;if e al r ig oc lr ;e re c rk e wod n o o t mp c- l so v c i nr d e r wann ;v ieaam r a y meg n yb a e
1 系统原 理及 红外 电路
施, 必要 时该 系统具 有 自动制 动 功能 , 效地 防止 事 故发 生。 有 关 键词 : 矿 井机 车 防撞 ;红 外预警 ;语 音报 警 ;紧急制 动
中图分类号 :D 2 ;P 7 . 1 T 5 4 = 7 3 r2 文献标识码 : A 文章编号 : 0 ~ 8 4 2 1 )5— 0 1 0 1 1 0 7 (0 1 0 0 3 — 3 0
Re e r h o iig Elc r a o o t e An i l in S se s a c n M nn e ti l c mo i t Col o y t m c L v — i s
XU We- E iwe ,HU We ,DONG n Ra
( ol eo l tcl n uo a o nier g H nnP lt h i U ie i , iou 50 0 C ia C l g f e r a adA tm t nE g e n , ea o e nc nvr t J zo4 40 , hn ) e E ci i n i yc sy a
o n r r d d t cin wa n n .Th s s se c n c l rv r n ifa e ee to r i g i y tm a ald e s’a tn in t a p r p a e me s r s,i e e s r i te to o tke a p o r t a u e i fn c s ay, t e s se h s a u o tc b a i g f n t n t a a r v n c i e t fe tv l . h y tm a n a t ma i r k n u c i h tc n p e e ta c d n s ef cie y o
矿用电机车变频调速系统的设计与实现
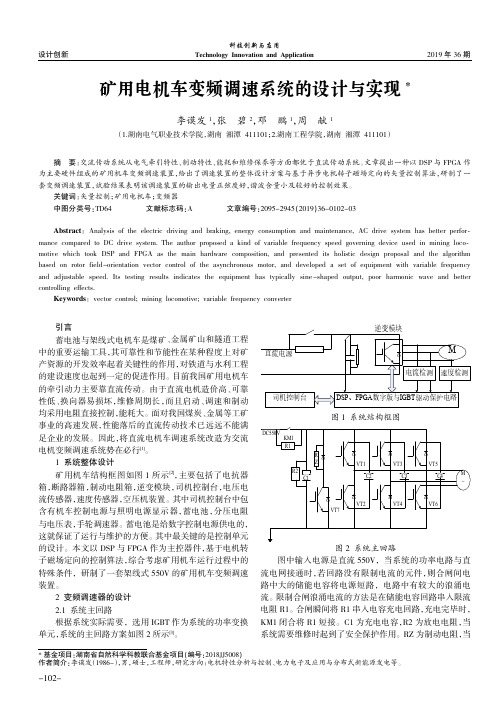
2019年36期设计创新科技创新与应用Technology Innovation and Application矿用电机车变频调速系统的设计与实现*李谟发1,张碧2,邓鹏1,周献1(1.湖南电气职业技术学院,湖南湘潭411101;2.湖南工程学院,湖南湘潭411101)引言蓄电池与架线式电机车是煤矿、金属矿山和隧道工程中的重要运输工具,其可靠性和节能性在某种程度上对矿产资源的开发效率起着关键性的作用,对铁道与水利工程的建设速度也起到一定的促进作用。
目前我国矿用电机车的牵引动力主要靠直流传动。
由于直流电机造价高、可靠性低、换向器易损坏,维修周期长,而且启动、调速和制动均采用电阻直接控制,能耗大。
面对我国煤炭、金属等工矿事业的高速发展,性能落后的直流传动技术已远远不能满足企业的发展。
因此,将直流电机车调速系统改造为交流电机变频调速系统势在必行[1]。
1系统整体设计矿用机车结构框图如图1所示[2],主要包括了电抗器箱,断路器箱,制动电阻箱,逆变模块,司机控制台,电压电流传感器,速度传感器,空压机装置。
其中司机控制台中包含有机车控制电源与照明电源显示器,蓄电池,分压电阻与电压表,手轮调速器。
蓄电池是给数字控制电源供电的,这就保证了运行与维护的方便。
其中最关键的是控制单元的设计。
本文以DSP 与FPGA 作为主控器件,基于电机转子磁场定向的控制算法,综合考虑矿用机车运行过程中的特殊条件,研制了一套架线式550V 的矿用机车变频调速装置。
2变频调速器的设计2.1系统主回路根据系统实际需要,选用IGBT 作为系统的功率变换单元,系统的主回路方案如图2所示[3]。
图中输入电源是直流550V ,当系统的功率电路与直流电网接通时,若回路没有限制电流的元件,则合闸间电路中大的储能电容将电源短路,电路中有较大的浪涌电流。
限制合闸浪涌电流的方法是在储能电容回路串入限流电阻R1。
合闸瞬间将R1串入电容充电回路,充电完毕时,KM1闭合将R1短接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湘潭大学课程设计说明书课程名称:电气与PLC控制技术题目:矿用电机车控制系统的设计学院:能源工程学院专业:电子信息科学与技术学号: 200992001221姓名:唐彩琴指导教师:李云新完成日期: 2011年6月30日目录1引言 (1)2方案设计与论证 (1)2.1 控制方案及论证 (1)2.2 显示界面方案的选择 (4)2.3 输入方案的选择 (4)3控制系统硬件设计 (4)3.1PLC类型的选择 (4)3.1.1产品分选控制要求 (4)3.1.2系统I/O点数的计算 (5)3.1.3 PLC型号的选择 (5)3.2显示模块的设计 (6)3.2.1硬件的设计思路 (6)3.2.2 软件的设计思路 (6)3.2.3 显示模块的电路图 (7)3.3 操作面板的设计 (9)4控制系统软件设计 (11)4.1 系统I/O分配 (11)4.2 主要程序设计 (13)4.2.1 按键操作说明 (13)4.2.2 主控制程序 (13)4.2.3动态显示控制程序 (13)4.2.4 计数及显示程序 (14)4.2.5 计时及显示程序 (16)4.2.6 故障程序 (18)5 结束语 (31)附录各程序梯形图……………………………………………………………矿用电机车控制系统设计1引言随着社会迅速的发展,各机械产品层出不穷。
控制系统的发展已经很成熟,应用范围涉及各个领域,例如;机械、汽车制造、化工、交通、军事、民用等。
PLC专为工业环境应用而设计,其显著的特点之一是可靠性高,抗干扰性强。
PLC的应用不但大大的提高了电气控制系统的可靠性和抗干扰性,而且大大的简化和减少了维修维护的工作量。
本设计综合考虑了制造业的现状,结合了电机车的工作原理,给出一种简单实用的电机车控制系统的PLC设计方案。
系统中设计了故障检测的装置,让技术人员的工作更为简单、方便、快捷。
实验也证明该系统应用简单、经济,在工作中能更快、更准确的运行。
因此,大大的提高了生产率,降低了工人的劳动强度,降低了企业的生产成本,提高了企业的经济效益,是我们热切看到的。
可编程序控制器是以微处理器为核心的通用工业自动化装置。
它将传统的继电器控制技术与计算机技术和通信技术融为一体,具有结构简单、性能优越、可靠性强、灵活通用、易于编程、使用方便等优点。
针对矿山工作的特定环境,本系统设计的电机广泛应用于矿山。
2 方案设计与论证2.1 控制方案及选择方案一:采用可编程控制器(PLC)控制。
该方案的优点是系统简明扼要,编程元件丰富和编程语言灵活,系统扩展容易,部件少,可靠性高,抗干扰能力强,功能完善,适用性强,系统的设计工作量小,维护方便,容易改造。
方案二:采用单片机控制。
该方案的优点是价格便宜,编程容易,体积小,适用性强,节约成本;缺点是其外围电路复杂,部件多,若焊接中存在虚焊,系统稳定性和可靠性变差。
方案三:采用继电器—接触器控制。
优点是价格低廉、对维护技术要求不高,适用于工作模式固定、控制要求简单的场合。
缺点是系统的布线连接不宜更新、功能不宜扩展,可靠性不高。
对复杂的控制系统,查找和排除故障困难;产品更新、生产工艺变化时,继电器控制系统的元件和接线也须作相应的变动,这种变动工作量很大,工期长,费用高。
综上所述,我选择第一种方案。
2.2 显示界面方案选择方案一:完全采用LED显示。
这种方案只显示有限的符号和数码字符,所需的编程和硬件要求很高。
方案二:完全采用阵式LCD显示。
这种方案实现复杂,且须完成大量的软件工作;但功能强大,可方便的显示各种英文字符,汉字,图形等。
方案三:采用 LED与点阵LCD相结合的方法。
因为既要求倒计时数字输出,又要求有汉字信息提示及图形输出等,为方便观看并考虑到现实情况,用LED与LCD分别显示时间与提示信息。
这种方案既满足系统功能要求,又减少了系统实现的复杂度,但是相对价格比较高。
权衡利弊,决定采用方案一来实现系统的数字显示。
2.3 输入方案的选择方案一:输入口直接输入该方案的优点是:简单明了,但占用输入点多、成本高。
方案二:矩阵式键盘输入占用输入点少、成本低、且直观、整体性能强、操作方便。
综合方案一和二,权蘅利弊选择方案二。
3 控制系统硬件设计3.1 PLC类型的选择3.1.1 矿用电机车控制要求1.控制系统对矿用架线式电机车实现启动、停止等控制。
对制动距离、撒砂管撒砂、轮对轴承温度、车身平稳性、受电弓接触等情况实施检测,对运行总时间、往返次数进行计数并显示。
2. 当出现制动距离达不到规定的要求、撒砂管不撒砂、轮对轴承温度过高车身歪斜左右摇晃、脱轨掉道、受电弓接触不良等故障时报警并显示。
3.1.2 系统I/O点数的计算1.显示控制I/O点计算:运行总时间显示字形输出需输出点4个,字位输出控制需输出点3个。
往返次数显示字形输出需输出点4个,字位输出控制需输出点3个。
2.基本控制I/O点计算:组成2×8键盘需输入点8个,输出点2个;系统启动、系统停止、计时清零、计数清零、加速、减速、制动、前进、后退、计数等控制和制动距离达不到规定的要求、撒砂管不撒砂、脱轨掉道、受电弓接触不良4个检测输入故障信号从键盘输入;4个轮对轴承温度检测输入、4个车身歪斜左右摇晃检测输入故障信号直接从输入口输入;制动距离达不到规定的要求、撒砂管不撒砂、脱轨掉道、受电弓接触不良4个故障灯信号输出,需要4个输出点;4个轮对轴承温度过高、4个车身歪斜左右摇晃故障灯信号输出需要8个输出点;报警音响信号输出需要1个输出点;电源指示信号输出需要1个输出点;加速、减速控制信号输出需要输出点2个;制动、前进、后退控制信号与接触器线圈并联需要输出点3个;故障解除1个。
综上,一共需要输入点共13个,需要输出点20个。
3.1.3 PLC型号的选择目前在国内市场上有从美国、德国、日本等国引进的多种系列PLC,国内也有许多厂家组装、开发数十种PLC,故PLC系列标准不一,功能参差不齐,价格悬殊。
在此情况下,PLC的选择应着重考虑PLC的性能价格比,选择可靠性高,功能相当,负载能力合适,经济实惠的PLC。
本文介绍以四段液位控制对象为例,据对多种因素的分析比较及监控系统输入、输出点数的要求,选用日本三菱公司FX2型PLC 。
基本控制选:FX2N-32MR显示控制选:FX2N-24EYT3.2 显示模块的设计3.2.1.硬件的设计思路(1)采用带译码器和片选输入点的七段显示译码器①,来显示0~9十个数字。
并根据显示数字的位数及组数,选用相应个数的七段数字显示器件部件,来显示1位、2位、3位、4位等多位数或几个数字组。
(2)用PLC的4个输出点形成4条数据线。
由这4条数据线组成显示数字的数据总线。
数字量输出用二进制的0000~1001代表0~9,各个显示数字值传输到相对应的显示器件。
(3)PLC输出点与地址译码器配合控制各显示器件数据输入的选通或锁存。
根据显示数字的位数及组数,选用相应译码器的型号和个数。
(4)用PLC的4个(或3个、2个等)输出点形成4条(或3条、2条等)地址线。
由这4条(或3条、2条等)地址线组成显示数字的地址总线。
数字量输出用二进制的0000~1111代表0~15位(或000~111代表0~7位、00~11代表0~3位等)。
总线与接口电路框图,如图2所示。
3.2.2软件设计思路(1)将需要数字显示的PLC内部数据字或数据双字由整数转化为BCD码。
(2)在BCD码表示的数据中,以个位BCD码的20~23位对应数据总线20~23位的数位输出。
十位、百位、千位等BCD码通过移位使其数位与个位数位对应。
20~23位为个位BCD码,可以直接输出;24~27位为十位BCD码,可通过逻辑右移4位,在个位BCD码数位输出;28~211位为百位BCD码,可通过逻辑右移8位,在个位BCD码数位输出。
以此类推,然后按时序在数据总线上分别发送个位、十位、百位、千位、万位等数字显示信号,以使个位、十位、百位、千位、万位等BCD码都在数据总线上传输数字显示数据。
(3)通过PLC地址输出点和地址译码器,提供各个数字显示器的片选信号,配合4条数据总线来发送数据,达到由指定显示部件的显示器接收显示数据。
控制各个片选输入来控制该数字显示器件输入数据的选通与锁存,使各个显示单元接收到对应的显示数据并予以锁存显示。
(4)合理地控制片选及锁存显示周期,使传送、显示能适应PLC扫描输出速率及显示器件的响应时间,使显示正常,消除无显示、显示闪烁、显示迟钝等现象。
(5)实现多参数的动态显示,只要将地址译码器的输出端与显示器件的片选输入端对应联接,对PLC数据做上述处理后,按时序在数据总线上发送,就可实现对应的数字显示。
3.2.3 显示模块的电路图如图3-1所示:74ls138: 3-8译码器。
Mc14495: 七段显示译码器:输出高电平有效驱动共极数码管。
动态显示:对数码管循环扫描输入显示数据。
FX2-32EYT:晶体管输出型扩展模块(PLC),有32个输出点。
Y20-Y23:输出BCD码,经Mc14495译成显示码,同时送给二数码管,由二进制输出。
经74LS—138译码后控制(任一时刻,只有一个管道通电)扩展模块输出:Y20~Y23:计时字形输出;Y24~Y27:计时字位输出;Y30~Y33:计数字形输出;Y34~Y37:计数字位输出;Y40:前左轮对轴承温度信号灯;Y41:前右轮对轴承温度信号灯;Y42:后左轮对轴承温度信号灯;Y43:后右轮对轴承温度信号灯;Y44:前左车身歪斜左右摇晃信号灯;Y45:前右车身歪斜左右摇晃信号灯;Y46:后左车身歪斜左右摇晃信号灯;Y47:后左车身歪斜左右摇晃信号灯。
图3-1 显示部分电路图3.3 操作面板的设计操作面板线路,如图3-2所示。
图中:Y16、Y17与X10-X17组成8行×2列键盘矩阵输入,构成操作面板。
图3-2 基本模块输入输出接线图1、基本模块键盘矩阵输入:1号:制动距离检测输入;2号:撒砂管检测输入;3号:脱轨掉道检测输入;4号:受电弓接触检测输入;5号:前进命令输入;6号:后退命令输入;7号:加速命令输入;8号:减速命令输入;9号:制动命令输入;10号:报警命令输入;11号:计数命令输入;12号:故障解除命令输入;13号:计时清零命令输入;14号:计数清零命令输入;15号:系统启动命令输入;16号:系统停止命令输入。
2、基本模块直接输入:Y0:前左轮对轴承温度检测输入;Y1:前右轮对轴承温度检测输入;Y2:后左轮对轴承温度检测输入;Y3:后右轮对轴承温度检测输入;Y4:前左车身歪斜左右摇晃检测输入;Y5:前右车身歪斜左右摇晃检测输入;Y6:后左车身歪斜左右摇晃检测输入;Y7:后右车身歪斜左右摇晃检测输入;3、基本模块直接输出:Y0:制动距离故障信号灯输出;Y1:撒砂管不撒砂故障信号灯输出;Y2:脱轨掉道故障信号灯输出;Y3:受电弓接触不良故障信号灯输出;Y4:报警电铃信号输出;Y5:电源信号灯输出;Y6:制动电磁铁线圈输出;Y7:前进接触器线圈输出;Y10:后退接触器线圈输出;Y11:加速信号灯输出;Y12:减速信号灯输出。