驱动程序架构
UNIX下设备驱动程序的基本结构

UNIX下设备驱动程序的基本结构在Unix系统里,对用户程序而言,设备驱动程序隐藏了设备的具体细节,对各种不同设备提供了一致的接口,一般来说是把设备映射为一个特殊的设备文件,用户程序可以象对其它文件一样对此设备文件进行操作。
UNIX对硬件设备支持两个标准接口:块特别设备文件和字符特别设备文件,通过块(字符)特别设备文件存取的设备称为块(字符)设备或具有块(字符)设备接口。
块设备接口仅支持面向块的I/O操作,所有I/O操作都通过在内核地址空间中的I/O缓冲区进行,它可以支持几乎任意长度和任意位置上的I /O请求,即提供随机存取的功能。
字符设备接口支持面向字符的I/O操作,它不经过系统的快速缓存,所以它们负责管理自己的缓冲区结构。
字符设备接口只支持顺序存取的功能,一般不能进行任意长度的I/O请求,而是限制I/O请求的长度必须是设备要求的基本块长的倍数。
显然,本程序所驱动的串行卡只能提供顺序存取的功能,属于是字符设备,因此后面的讨论在两种设备有所区别时都只涉及字符型设备接口。
设备由一个主设备号和一个次设备号标识。
主设备号唯一标识了设备类型,即设备驱动程序类型,它是块设备表或字符设备表中设备表项的索引。
次设备号仅由设备驱动程序解释,一般用于识别在若干可能的硬件设备中,I/O请求所涉及到的那个设备。
设备驱动程序可以分为三个主要组成部分:(1) 自动配置和初始化子程序,负责检测所要驱动的硬件设备是否存在和是否能正常工作。
如果该设备正常,则对这个设备及其相关的、设备驱动程序需要的软件状态进行初始化。
这部分驱动程序仅在初始化的时候被调用一次。
(2) 服务于I/O请求的子程序,又称为驱动程序的上半部分。
调用这部分是由于系统调用的结果。
这部分程序在执行的时候,系统仍认为是和进行调用的进程属于同一个进程,只是由用户态变成了核心态,具有进行此系统调用的用户程序的运行环境,因此可以在其中调用sleep()等与进程运行环境有关的函数。
Linux设备驱动程序原理及框架-内核模块入门篇
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
(整理)LCD驱动架构.
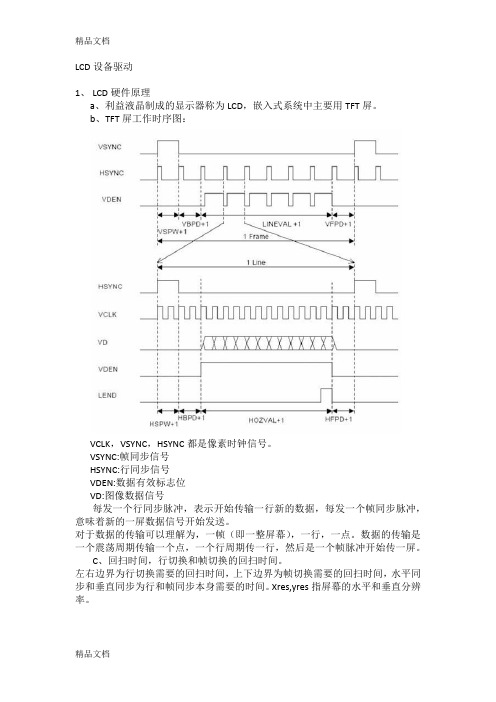
LCD设备驱动1、LCD硬件原理a、利益液晶制成的显示器称为LCD,嵌入式系统中主要用TFT屏。
b、TFT屏工作时序图:VCLK,VSYNC,HSYNC都是像素时钟信号。
VSYNC:帧同步信号HSYNC:行同步信号VDEN:数据有效标志位VD:图像数据信号每发一个行同步脉冲,表示开始传输一行新的数据,每发一个帧同步脉冲,意味着新的一屏数据信号开始发送。
对于数据的传输可以理解为,一帧(即一整屏幕),一行,一点。
数据的传输是一个震荡周期传输一个点,一个行周期传一行,然后是一个帧脉冲开始传一屏。
C、回扫时间,行切换和帧切换的回扫时间。
左右边界为行切换需要的回扫时间,上下边界为帧切换需要的回扫时间,水平同步和垂直同步为行和帧同步本身需要的时间。
Xres,yres指屏幕的水平和垂直分辨率。
d、以我们TFT-LCD中需要了解到的硬件参数描述为例。
分辨率:768*1024(256*3=768)Spec中的时序图。
了解硬件参数需要根据具体不同的硬件设置参数。
2、帧缓冲(framebuffer)帧缓冲是linux系统为显示设备提供的借口,将显示缓冲区抽象。
帧缓冲设备为标准的字符设备,因此我们可以参加一般字符设备驱动的架构来理解。
上层应用程序只需要往帧缓冲设备的显示缓冲区中写入与显示点对应的区域的颜色值,对应的颜色就会显示在屏幕上。
所以对于LCD驱动的理解,主要部分就是对帧缓冲设备的操作。
a、帧缓冲设备驱动架构:b、理解帧缓冲设备需要了解的几个重要结构体,也就是在注册驱动时需要用到的几个结构体fb_info结构体(简称FBI)FBI是帧缓冲设备中最关键的一个结构体,包括了帧缓冲设备属性和操作的完整性struct fb_info {int node;int flags;struct fb_var_screeninfo var; /* Current var *///可变参数struct fb_fix_screeninfo fix; /* Current fix *///固定参数struct fb_monspecs monspecs; /* Current Monitor specs */struct work_struct queue; /* Framebuffer event queue */struct fb_pixmap pixmap; /* Image hardware mapper */struct fb_pixmap sprite; /* Cursor hardware mapper */struct fb_cmap cmap; /* Current cmap */struct list_head modelist; /* mode list */struct fb_videomode *mode; /* current mode */#ifdef CONFIG_FB_BACKLIGHT/* assigned backlight device *//* set before framebuffer registration,remove after unregister */struct backlight_device *bl_dev;/* Backlight level curve */struct mutex bl_curve_mutex;u8 bl_curve[FB_BACKLIGHT_LEVELS];#endifstruct fb_ops *fbops;struct device *device; /* This is the parent */struct device *dev; /* This is this fb device */int class_flag; /* private sysfs flags */#ifdef CONFIG_FB_TILEBLITTINGstruct fb_tile_ops *tileops; /* Tile Blitting */#endifchar __iomem *screen_base; /* Virtual address */unsigned long screen_size; /* Amount of ioremapped VRAM or 0 */void *pseudo_palette; /* Fake palette of 16 colors */#define FBINFO_STATE_RUNNING 0#define FBINFO_STATE_SUSPENDED 1u32 state; /* Hardware state i.e suspend */void *fbcon_par; /* fbcon use-only private area *//* From here on everything is device dependent */void *par;};其中,fb_ops,是指向硬件底层操作的函数指针。
android驱动程序之-sensor

android驱动程序之-sensor上图是android系统架构图,从中可以得知,sensor必贯穿架构的各个层次。
按照架构层次,下⾯从五个⽅⾯来分析sensor架构:1. sensor架构之App层;2. sensor架构之Framework层;3. sensor架构之Libraries层;4. sensor架构之HAL层;5. sensor架构之Driver。
1. sensor架构之App层下⾯以g-sensor为例,写⼀个简单的apk,看⼀下sensor在App层到底是如何⼯作的,⼀般需要下⾯四个步骤来实现⼀个sensor应⽤。
Step1:通过getSystemService获取sensor服务,其实就是初始化⼀个SensorManager实例;1 SensorManager mSensorManager = (SensorManager)getSystemService(SENSOR_SERVICE);Step2:通过SensorManager的getDefaultSensor⽅法获取指定类型的传感器的sensor对象;1 Sensor sensor = mSensorManager.getDefaultSensor(Sensor.TYPE_GRAVITY); // 重⼒感应Step3:实现SensorEventListener接⼝的onSensorChanged和onAccuracyChanged⽅法;1 SensorEventListenerlsn = new SensorEventListener() {2public void onSensorChanged(SensorEvent e) {3//当传感器的值发⽣变化时,会执⾏这⾥4 }56public void onAccuracyChanged(Sensor s, int accuracy) {7//当传感器的精度变化时,会执⾏这⾥8 }9 };Step4:通过SensorManager的registerListener⽅法注册监听,获取传感器变化值。
Linux内核USB驱动程序框架

25.2 USB驱动程序框架Linux内核提供了完整的USB驱动程序框架。
USB总线采用树形结构,在一条总线上只能有唯一的主机设备。
Linux内核从主机和设备两个角度观察USB总线结构。
本节介绍Linux内核USB驱动程序框架。
25.2.1 Linux内核USB驱动框架图25-2是Linux内核从主机和设备两个角度观察USB总线结构的示意图。
从图25-2中可以看出,Linux内核USB驱动是按照主机驱动和设备驱动两套体系实现的,下面介绍两套体系的结构和特点。
1.基本结构图25-2的左侧是主机驱动结构。
主机驱动的最底层是USB主机控制器,提供了OHCI/EHCI/UHCI这3种类型的总线控制功能。
在USB控制器的上一层是主机控制器的驱动,分别对应OHCI/EHCI/UHCI这3种类型的总线接口。
USB核心部分连接了USB控制器驱动和设备驱动,是两者之间的转换接口。
USB设备驱动层提供了各种设备的驱动程序。
USB主机部分的设计结构完全是从USB总线特点出发的。
在USB总线上可以连接各种不同类型的设备,包括字符设备、块设备和网络设备。
所有类型的USB设备都是用相同的电气接口,使用的传输协议也基本相同。
向用户提供某种特定类型的USB设备时,需要处理USB总线协议。
内核完成所有的USB总线协议处理,并且向用户提供编程接口。
图25-2 Linux内核USB总线结构图25-2右侧是设备驱动结构。
与USB主机类似,USB设备提供了相同的层次结构与之对应。
但是在USB设备一侧使用名为Gadget API的结构作为核心。
Gadget API是Linux内核实现的对应USB设备的核心结构。
Gadget API屏蔽了USB设备控制器的细节,控制具体的USB设备实现。
2.设备每个USB设备提供了不同级别的配置信息。
一个USB设备可以包含一个或多个配置,不同的配置使设备表现出不同的特点。
其中,设备的配置是通过接口组成的。
Linux内核定义了USB设备描述结构如下:struct usb_device_descriptor {__u8 bLength; // 设备描述符长度__u8 bDescriptorType; // 设备类型__le16 bcdUSB; // USB版本号(使用BCD编码)__u8 bDeviceClass; // USB设备类型__u8 bDeviceSubClass; // USB设备子类型__u8 bDeviceProtocol; // USB设备协议号__u8 bMaxPacketSize0; // 传输数据的最大包长__le16 idVendor; // 厂商编号__le16 idProduct; // 产品编号__le16 bcdDevice; // 设备出厂号__u8 iManufacturer; // 厂商字符串索引__u8 iProduct; // 产品字符串索引__u8 iSerialNumber; // 产品序列号索引__u8 bNumConfigurations; // 最大的配置数量} __attribute__ ((packed));从usb_device_descriptor结构定义看出,一个设备描述符定义了与USB设备有关的所有信息。
驱动程序架构

unsigned long copy_from_user (void * to , const void * from , unsigned long count);
<V 3.0>
1.2 字符设备驱动程序接口
ioctl方法 ioctl方法
方法主要用于对设备进行读写之外的其他控制, ioctl 方法主要用于对设备进行读写之外的其他控制,比如配置 设备、进入或退出某种操作模式, 设备、进入或退出某种操作模式,这些操作一般都无法通过 read/write 文件操作来完成,比如在UP-NETARM2410中的SPI 设 文件操作来完成,比如在UP-NETARM2410中的SPI UP 中的 备通道的选择操作,无法通过write 操作控制,这就是ioctl 备通道的选择操作,无法通过write 操作控制,这就是ioctl 操 作的功能。 作的功能。
1.2 字符设备驱动程序接口
static int spioc_open(struct inode *inode, struct file *filp){ /* 这里是open函数的代码 */ 这里是open函数的代码 open return ret; } static int spioc_close(struct inode *inode, struct file *filp){ 这里是close close函数的代码 /* 这里是close函数的代码 */ return ret; }
static ssize_t demo_write(struct file *filp,const char *buffer, 文件指针 size_t count ,loff_t *ppos){ 数据长度 文件偏移量 数据缓冲区
copy_from_user(drv_buf , buffer, count); return count; } static ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos){ copy_to_user(buffer, drv_buf,count); return count; }
设备驱动程序基本结构

设备驱动程序基本结构设备驱动程序是计算机系统中用来控制硬件设备的软件模块。
它负责与硬件设备进行通信,将操作系统的指令翻译成硬件可以理解的信号,以实现对设备的控制和管理。
一个良好设计和实现的设备驱动程序能够提高系统的性能和稳定性,保证硬件设备的正常工作。
设备驱动程序的基本结构由以下几个部分组成:1. 初始化和资源分配:在设备驱动程序运行之前,需要进行一些必要的初始化工作。
这包括分配内存空间、初始化寄存器、设置中断等。
这些操作旨在为设备驱动程序提供必要的资源,使其能够正常工作。
2. 设备注册和注销:在设备驱动程序加载时,需要将设备与驱动程序进行绑定,以建立二者之间的联系。
这一过程称为设备注册。
当设备不再需要被驱动时,需要将其从驱动程序中注销,释放相关资源。
设备注册和注销是设备驱动程序中非常重要的环节。
3. 设备操作函数:设备操作函数是设备驱动程序中最核心的部分。
它包括设备的打开、关闭、读取和写入等操作。
这些操作通过调用设备驱动程序提供的接口函数来实现。
设备操作函数能够实现对硬件设备的控制和管理,使其能够完成特定的功能。
4. 中断处理函数:中断是计算机系统中一种常见的事件处理机制。
当硬件设备发生某些特定的事件时,会触发中断信号,通知操作系统进行相应的处理。
设备驱动程序中的中断处理函数负责处理这些中断事件,以实现对设备的实时响应。
5. 设备文件系统接口:设备驱动程序与操作系统之间通过文件系统进行通信。
设备驱动程序需要实现相应的文件系统接口,以便操作系统能够调用驱动程序提供的功能。
这些接口包括设备文件的打开、关闭、读取和写入等操作。
6. 错误处理和调试:设备驱动程序中需要实现相应的错误处理机制,以应对可能出现的错误情况。
同时,为了方便调试和排查问题,设备驱动程序还需要提供相应的调试接口和日志功能。
7. 设备驱动程序的可移植性:设备驱动程序需要具备良好的可移植性,以适应不同的硬件平台和操作系统。
为了实现可移植性,设备驱动程序需要遵循一定的编程规范和标准,使用通用的接口和数据结构。
eMMC 驱动架构分析

void mmc_detectБайду номын сангаасchange(struct mmc_host *host, unsigned long delay) // core/core.c
{
mmc_schedule_delayed_work(&host->detect, delay);
}
static int mmc_schedule_delayed_work(struct delayed_work *work, unsigned long delay)
一.需要的基础知识: 1. LINUX 设备驱动的基本结构。 2. 块设备驱动程序的基本构架(相信研究过 LDD3 当中的 sbull 的人应该都不成问 题,如果只是走马观花的话,那可得好好再补补了)
3. LINUX 设备驱动模型。
4.
EMMC 的原理,是 Nand Flash 的基础上加上一个负责:ECC、负载均衡和坏块管
理功能的 controler。
二.驱动程序分析 首先,说明一下 EMMC 驱动涉及到的文件。另外,我们重点是分析驱动程序的基本构
架,所以不同内核版本的差异并不是很大。 MMC/SD 卡驱动程序位于 drivers/mmc 目录 下 Card/
block.c queue.c/queue.h core/ bus.c/bus.h core.c/core.h
(3) 主机控制器层
主机控制器则是依赖于不同的平台的,例如 s3c2410 的卡控制器和 atmel 的卡控制器必 定是不一样的,所以要针对不同的控制器来实现。以 s3cmci.c 为例,它首先要进行一些设 置,例如中断函数注册,全能控制器等等。然后它会向 core 层注册一个主机( host ), 用结构 mmc_host_ops 描述,这样核心层就可以拿着这个 host 来操作 s3c24xx 的卡控 制器了,而具体是 s3c24xx 的卡控制器还是 atmel 的卡控制器, core 层是不用知道的。