自动控制原理 试卷2
自动控制原理练习题2
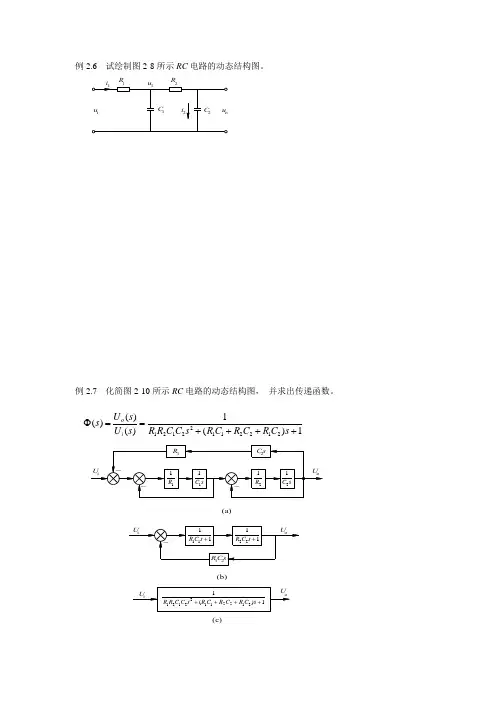
例2.6 试绘制图2-8所示RC 电路的动态结构图。
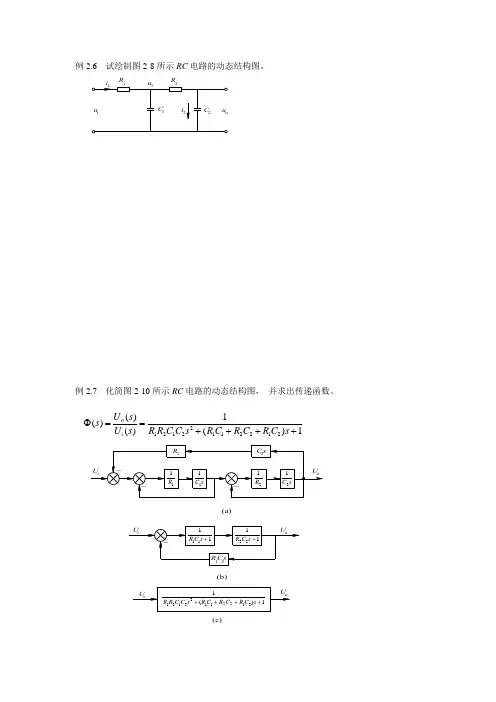
例2.7 化简图2-10所示RC 电路的动态结构图, 并求出传递函数。
R R 1)(1)()()(21221122121++++==Φs C R C R C R s C C R R s U s U s i o(a)(b)(c)例2.8 试绘制图2-22所示RC 电路的动态结构图对应的信号流图。
例2.9 试用梅逊公式求图2-23所示RC 电路的信号流图的传递函数。
例2.10 试用梅逊公式求图2-24所示动态结构图的传递函数。
o例3.1 一阶系统的结构如图3-7所示,其中KK为开环放大倍数,KH为反馈系数。
设KK=100,KH=0.1,试求系统的调节时间ts(按±5%误差带)。
如果要求ts=0.1 s,求反馈系数。
例3.3 已知系统的特征方程s4+2s3+3s2+4s+5=0试判断该系统的稳定性。
例3.4 系统如图3-15所示。
为使系统稳定,试确定放大倍数K的取值范围。
例3.5 已知系统的特征方程s3+2s2+s+2=0试判断系统的稳定性。
例3.6 设系统的特征方程为s3-3s+2=0试用劳斯判据确定该方程的根在s平面上的分布。
例3.7 某控制系统的特征方程为s6+2s5+8s4+12s3+20s2+16s+16=0试判断系统的稳定性。
例3.8 已知系统的结构如图3-23所示。
求 时系统的稳态误差。
例 3.9 设系统结构如图3-19所示, 其中 又设r (t )=2t , n (t )=0.5×1(t )求系统的稳态误差。
例4.1 设某负反馈系统的开环传递函数 试绘制该系统的根轨迹图。
211)(s s s R +=s s H s s G s s G 2)(,135)(,510)(21=+=+=)2)(1()()(++=s s s k s H s G例4.9 设某正反馈系统的开环传递函数为 试绘制该系统的根轨迹图。
例4.10 设某反馈系统的开环传递函数为试绘制该系统的根轨迹图2)4)(1)(1()()(+-+=s s s k s H s G )22)(73.2()()(2+++=s s s s k s H s G统的根轨迹图。
自动控制原理试卷2
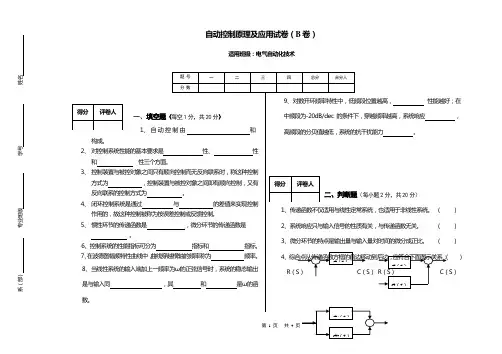
自动控制原理及应用试卷(B卷)适用班级:电气自动化技术))))))))5()0.011G S S =+ωωR1R2C1、 一个传递函数是:STS G 1)(=,它属于: ( ) A 、 比例环节 B 、微分环节 C 、积分环节 D 、惯性环节 2、峰值时间是系统的一个动态性能指标,它是指; ( ) A 、系统响应从零开始第一次上升到稳态值所需的时间; B 、系统响应从零开始第一次到达峰值所需的时间;C 、系统响应从零开始到达并保持在稳态误差范围内的时间。
3、一系统的开环传递函数是:)12.0)(11.0(20)(++=S S S G其速度误差系数是; ( )A 、∞B 、20C 、0D 、1/20 4、一系统的开环传递函数为 其阶路输入时的稳态误差是:( ) A 、0 B 、15 C 、16D 、∞5、一装置的频率特性为;11.0101.0(++=ωωωj j j G ( )其幅频特性可用伯德图表示为A 、B 、6、系统稳定的充分必要条件是其特征方程式的所有根均在复平面的 ( )A. 实轴上B. 虚轴上C. 左半部分D. 右半部分7、积分环节的频率特性相位移θ(ω)为 ( ) A. 90° B. -90° C. 0° D. -180° 8、进行串联超前校正后,校正前的穿越频率ωC 与校正后的穿越频率C ω'的关系,通常是 ( )A. ωC =C ω'B. ωC >C ω'C. ωC <C ω'D. ωC 与C ω'无关9、由电子线路构成的控制器如图,它是 ( ) A. 超前校正装置B. 滞后校正装置C. 滞后—超前校正装置D. 超前—滞后校正装置10、采用超前校正会使系统的抗干扰能力 ( )A 、增强B 、削弱C 、不变四、计算题(每小题15分,共45分)1、 已知某单位反馈控制系统的开环传递函数为:)10)(2(200)(++=S S S S G (1)、求位置误差系数K P ;并求r(t)=1(t)时的稳态误差e ssp (2)、 求速度误差系数K V ;并求r(t)=t 时的稳态误差e ssV2、 某系统的动态结构图如下图所示, (1)、用动态结构图化简法或梅森公式写出其传递函数并化简; (2)、若要使系统稳定,确定K 的取值范围。
自动控制原理(二)试卷二
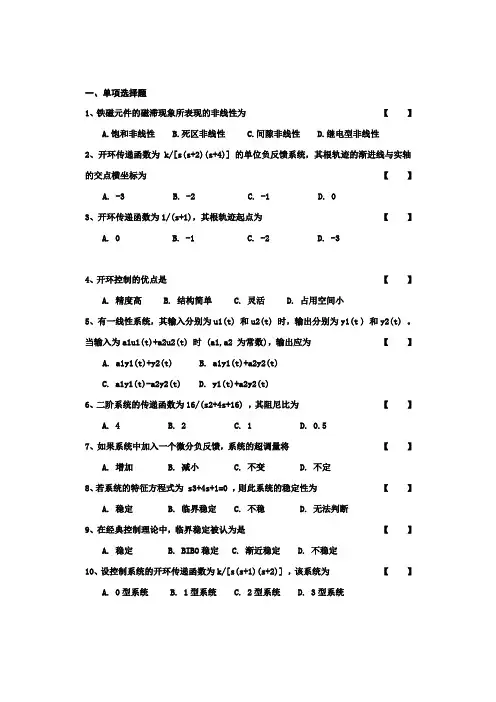
一、单项选择题1、铁磁元件的磁滞现象所表现的非线性为【】A.饱和非线性B.死区非线性C.间隙非线性D.继电型非线性2、开环传递函数为k/[s(s+2)(s+4)] 的单位负反馈系统,其根轨迹的渐进线与实轴的交点横坐标为【】A. -3B. -2C. -1D. 03、开环传递函数为1/(s+1),其根轨迹起点为【】A. 0B. -1C. -2D. -34、开环控制的优点是【】A. 精度高B. 结构简单C. 灵活D. 占用空间小5、有一线性系统,其输入分别为u1(t) 和u2(t) 时,输出分别为y1(t ) 和y2(t) 。
当输入为a1u1(t)+a2u2(t) 时 (a1,a2 为常数),输出应为【】 A. a1y1(t)+y2(t) B. a1y1(t)+a2y2(t)C. a1y1(t)-a2y2(t)D. y1(t)+a2y2(t)6、二阶系统的传递函数为16/(s2+4s+16) ,其阻尼比为【】A. 4B. 2C. 1D. 0.57、如果系统中加入一个微分负反馈,系统的超调量将【】A. 增加B. 减小C. 不变D. 不定8、若系统的特征方程式为 s3+4s+1=0 ,则此系统的稳定性为【】A. 稳定B. 临界稳定C. 不稳D. 无法判断9、在经典控制理论中,临界稳定被认为是【】A. 稳定B. BIBO稳定C. 渐近稳定D. 不稳定10、设控制系统的开环传递函数为k/[s(s+1)(s+2)] ,该系统为【】A. 0型系统B. 1型系统C. 2型系统D. 3型系统11、若两个环节的传递函数分别为G1和G2 ,则串联后的等效传递函数为【】A. G1G2B. G1/G2C. G1/(1+G1G2)D. G1/(1-G1G2)12、运算放大器的优点是【】A. 输入阻抗高,输出阻抗高B. 输入阻抗高,输出阻抗低C. 输入阻抗低,输出阻抗高D. 输入阻抗低,输出阻抗低13、单位阶跃函数在t>=0 时的表达式为【】A. 1B. tC. t^2D. 1/t14、二阶系统的传递函数为1/(0.01s^2+0.1s+1) ,其对数幅频特性渐近线的转折频率为【】A. 100rad/sB. 10rad/sC. 0.1rad/sD. 0.01rad/s15、下列频域性能指标中,反映闭环频域性能的是【】A. 谐振峰值MrB. 相位裕量γC. 增益裕量KgD. 剪切频率二、填空题1、0型系统对于抛物线输入的稳态误差为。
自动控制原理试卷、习题及答案2套
第 7 页 共 32 页
2-5 求图示运算放大器构成的网络的传递函数。
题 2-5 图
2-6 已知系统方框图如图所示,试根据方框图简化规则,求闭环传递函数。
题 2-6 图
2-7
分别求图示系统的传递函数 C1 (s) 、 C2 (s) 、 C1 (s) 、 C2 (s) R1 (s) R1 (s) R2 (s) R2 (s)
第 1 页 共 32 页
自动控制 (A )试卷
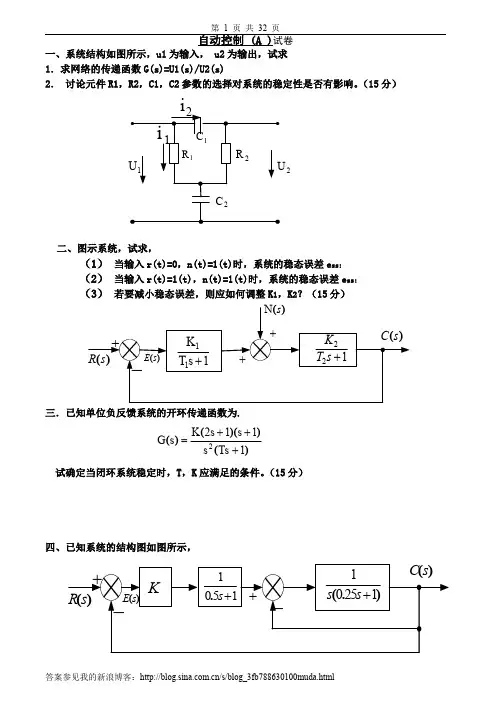
一、系统结构如图所示,u1 为输入, u2 为输出,试求
1.求网络的传递函数 G(s)=U1(s)/U2(s)
2. 讨论元件 R1,R2,C1,C2 参数的选择对系统的稳定性是否有影响。(15 分)
i2
i1
C1
R1
U1
R2
U2
C2
二、图示系统,试求,
(1) 当输入 r(t)=0,n(t)=1(t)时,系统的稳态误差 ess; (2) 当输入 r(t)=1(t),n(t)=1(t)时,系统的稳态误差 ess; (3) 若要减小稳态误差,则应如何调整 K1,K2?(15 分)
(2) 三阶系数的一对主导极点为 s1,2 1 j2 ,求同时满足上述条件的开环传递函 数G(s) 。
3 – 10 系统结构图如图所示,试求当 0 时,系统的 和
n 之值,如要求 =0.7,试确定参数 。
题 3-10 图
3 – 11 设单位反馈系统的开环传递函数如下,试确定系统稳定时 K 的取值范围。
输入信号 r(t)=1 作用下,能使给定系统成为最少拍系统的数字控制器的
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
第 4 页 共 32 页
自动控制原理试题及答案
自动控制原理试题及答案一、单项选择题(每题2分,共20分)1. 自动控制系统中,开环控制系统与闭环控制系统的主要区别在于()。
A. 是否有反馈B. 是否有前向通道C. 是否有反馈通道D. 是否有控制器答案:C2. 下列哪个是二阶系统的典型形式()。
A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D3. 在自动控制系统中,稳态误差为零的条件是()。
A. 系统为一阶系统B. 系统为二阶系统C. 系统为三阶系统D. 系统为任意阶系统答案:A4. 一个系统是线性的,当且仅当它满足()。
A. 叠加原理B. 齐次性C. 叠加原理和齐次性D. 以上都不是答案:C5. 系统的稳定性可以通过()来判断。
A. 劳斯-赫尔维茨准则B. 奈奎斯特准则C. 波特图D. 以上都是答案:D6. 一个系统是可控的,当且仅当其可控性矩阵是()。
A. 奇异的B. 非奇异的C. 正定的D. 负定的答案:B7. 一个系统的可控性与()无关。
A. 系统的状态B. 系统的输入C. 系统的输出D. 系统的参数答案:C8. 一个系统的可观测性与()无关。
A. 系统的状态B. 系统的输入C. 系统的输出D. 系统的参数答案:B9. 系统的传递函数是()。
A. 时域函数B. 频域函数C. 复频域函数D. 以上都不是答案:C10. 系统的稳定性可以通过()来分析。
A. 根轨迹图B. 波特图C. 奈奎斯特图D. 以上都是答案:D二、填空题(每题3分,共30分)1. 自动控制系统按照控制方式可以分为______控制系统和______控制系统。
答案:开环;闭环2. 系统的动态性能通常用______、______和______来描述。
答案:稳定性;准确性;快速性3. 系统的稳态误差与系统的______有关。
答案:类型4. 系统的稳定性可以通过______准则来判断。
答案:劳斯-赫尔维茨5. 系统的可控性可以通过______矩阵来判断。
自动控制原理练习题2
例2.6 试绘制图2-8所示RC 电路的动态结构图。
例2.7 化简图2-10所示RC 电路的动态结构图, 并求出传递函数。
R R 1)(1)()()(21221122121++++==Φs C R C R C R s C C R R s U s U s i o(a)(b)(c)例2.8 试绘制图2-22所示RC 电路的动态结构图对应的信号流图。
例2.9 试用梅逊公式求图2-23所示RC 电路的信号流图的传递函数。
例2.10 试用梅逊公式求图2-24所示动态结构图的传递函数。
o例3.1 一阶系统的结构如图3-7所示,其中KK为开环放大倍数,KH为反馈系数。
设KK=100,KH=0.1,试求系统的调节时间ts(按±5%误差带)。
如果要求ts=0.1 s,求反馈系数。
例3.3 已知系统的特征方程s4+2s3+3s2+4s+5=0试判断该系统的稳定性。
例3.4 系统如图3-15所示。
为使系统稳定,试确定放大倍数K的取值范围。
例3.5 已知系统的特征方程s3+2s2+s+2=0试判断系统的稳定性。
例3.6 设系统的特征方程为s3-3s+2=0试用劳斯判据确定该方程的根在s平面上的分布。
例3.7 某控制系统的特征方程为s6+2s5+8s4+12s3+20s2+16s+16=0试判断系统的稳定性。
例3.8 已知系统的结构如图3-23所示。
求 时系统的稳态误差。
例 3.9 设系统结构如图3-19所示, 其中 又设r (t )=2t , n (t )=0.5×1(t )求系统的稳态误差。
例4.1 设某负反馈系统的开环传递函数 试绘制该系统的根轨迹图。
211)(s s s R +=s s H s s G s s G 2)(,135)(,510)(21=+=+=)2)(1()()(++=s s s k s H s G例4.9 设某正反馈系统的开环传递函数为 试绘制该系统的根轨迹图。
例4.10 设某反馈系统的开环传递函数为试绘制该系统的根轨迹图2)4)(1)(1()()(+-+=s s s k s H s G )22)(73.2()()(2+++=s s s s k s H s G统的根轨迹图。
燕山大学研究生入学考试 自动控制原理考卷及答案(2)
三、 (共 24 分)
1、1 型、2 阶 (2 分) 2、K=1 (2 分) n =1 rad / s (2 分)
d n 1 2
3、 GK ( s)
3 0.866 rad / s (2 分) 2
(2 分) (1 分) (1 分) (1 分) (1 分) (1 分)
1 s( s 1) 4、 K p lim GK ( s)
s3 s2
2、 (6 分) (a)N+-N-=0-2=0,ZR=PR-2N=6,所以闭环不稳定。 (3 分) (b)N+-N-=2-1=1,ZR=PR-2N=0,所以闭环稳定。 (3 分)
六、 (共 9 分)
1、 (4 分)
4 2 s( s 2) s(0.5s 1) 所以, K 2 , 20 lg K 20 lg 2 6dB ; T 2 L ( ) / dB -20dB/dec GK ( s)
(a)
(b)
燕山大学试卷 密 封 线 共 8 页 第 2、已知最小相位系统对数幅频渐近线如图,试求对应的传递函数 G( s) 。 (6 分)
L() / dB
20
5 页
0dB / dec
20dB / dec
0dB
0.5
/ rad s 1
3、已知采样控制系统如图所示,写出系统的闭环脉冲传递函数
ms 2 X o ( s ) fsX o ( s ) (k1 k 2 ) X o ( s ) (k1 k 2 ) X i ( s )
化简并整理,得:
X o ( s) k1 k 2 X i ( s) ms 2 fs k1 k 2
(b)解:采用运算电阻的方法:
X o ( s) R 2 1 / Cs R 2 Cs 1 X i ( s) R 1 R 2 1/Cs (R1 R 2 )Cs 1
自动控制原理试题及答案
自动控制原理试题及答案一、单项选择题(每题2分,共20分)1. 自动控制系统中,开环系统与闭环系统的主要区别在于()。
A. 是否有反馈B. 控制器的类型C. 系统是否稳定D. 系统的响应速度答案:A2. 在控制系统中,若系统输出与期望输出之间存在偏差,则该系统()。
A. 是闭环系统B. 是开环系统C. 没有反馈D. 是线性系统答案:B3. 下列哪个是控制系统的稳定性条件?()A. 所有闭环极点都位于复平面的左半部分B. 所有开环极点都位于复平面的左半部分C. 所有闭环极点都位于复平面的右半部分D. 所有开环极点都位于复平面的右半部分答案:A4. PID控制器中的“P”代表()。
A. 比例B. 积分C. 微分D. 前馈答案:A5. 在控制系统中,超调量通常用来衡量()。
A. 系统的稳定性B. 系统的快速性C. 系统的准确性D. 系统的鲁棒性答案:C6. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则闭环传递函数T(s)是()。
A. G(s)H(s)B. G(s)H(s)/[1+G(s)H(s)]C. 1/[1+G(s)H(s)]D. 1/G(s)H(s)答案:B7. 根轨迹法是一种用于()的方法。
A. 系统稳定性分析B. 系统性能分析C. 系统设计D. 系统故障诊断答案:B8. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则T(s)的零点是()。
A. G(s)的零点B. H(s)的零点C. G(s)和H(s)的零点D. G(s)和H(s)的极点答案:A9. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则T(s)的极点是()。
A. G(s)的零点B. H(s)的零点C. 1+G(s)H(s)的零点D. G(s)和H(s)的极点答案:C10. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则系统的稳态误差与()有关。
自动控制原理考试试卷及答案
自动控制原理考试试卷及答案一、选择题(每题2分,共20分)1. 下列哪项不是自动控制系统的基本组成部分?A. 控制器B. 被控对象C. 执行机构D. 操作人员答案:D2. 在自动控制系统中,下列哪项属于反馈环节?A. 控制器B. 执行机构C. 被控对象D. 反馈元件答案:D3. 下列哪种控制方式属于闭环控制?A. 比例控制B. 积分控制C. 微分控制答案:D4. 下列哪种控制方式属于开环控制?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分控制答案:A5. 在自动控制系统中,下列哪种控制规律不会产生稳态误差?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:B6. 下列哪种控制方式适用于一阶惯性环节?A. 比例控制B. 积分控制C. 微分控制答案:A7. 在自动控制系统中,下列哪种环节不会产生相位滞后?A. 比例环节B. 积分环节C. 微分环节D. 比例-积分环节答案:A8. 下列哪种控制方式可以使系统具有较好的稳定性和快速性?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D9. 在自动控制系统中,下列哪种环节可以使系统具有较好的阻尼效果?A. 比例环节B. 积分环节C. 微分环节D. 比例-积分环节答案:C10. 下列哪种控制方式可以使系统具有较好的跟踪性能?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D二、填空题(每题2分,共20分)1. 自动控制系统的基本组成部分有:控制器、被控对象、执行机构、________。
答案:反馈元件2. 在自动控制系统中,反馈环节的作用是________。
答案:减小系统的稳态误差3. 闭环控制系统的特点有:________、________、________。
答案:稳定性好、快速性好、准确性高4. 开环控制系统的缺点有:________、________、________。
《自动控制原理》试题及答案(word版可编辑修改)
《自动控制原理》试题及答案(word版可编辑修改)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(《自动控制原理》试题及答案(word版可编辑修改))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为《自动控制原理》试题及答案(word版可编辑修改)的全部内容。
《自动控制原理》试题及答案1、若某串联校正装置的传递函数为(10s+1)/(100s+1),则该校正装置属于(B )。
3分2、在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是(A)3分3、在系统中串联PD调节器,以下那一种说法是错误的(D) 3分A是一种相位超前校正装置B能影响系统开环幅频特性的高频段C使系统的稳定性能得到改善D使系统的稳态精度得到改善4、用超前校正装置改善系统时,主要是利用超前校正装置的(A )3分5、I型系统开环对数幅频特性的低频段斜率为(B )9分6、设微分环节的频率特性为G(jω),当频率ω从0变化至∞时,其极坐标平面上的奈氏曲线是() 9分7、关于线性系统稳定性的判定,下列观点正确的是 ( )。
9分8、若两个系统的根轨迹相同,则有相同的( ) 9分9、关于系统零极点位置对系统性能的影响,下列观点中正确的是() 7分10、高阶系统的主导闭环极点越靠近虚轴,则系统的( ) 2分11、若某最小相位系统的相角裕度γ〉0,则下列说法正确的是( )。
2分12、某环节的传递函数是G(s)=5s+3+2/s,则该环节可看成由(D )环节组成。
2分13、主导极点的特点是(A )2分14、设积分环节的传递函数为G(s)=K/s,则其频率特性幅值A(ω)=()2分15、某环节的传递函数为K/(Ts+1),它的对数幅频率特性随K值增加而()2分16、某系统的传递函数是G(s)=1/(2s+1),则该可看成由(C )环节串联而成2分17、若系统的开环传递函数在s右半平面上没有零点和极点,则该系统称作(B)2分18、某校正环节传递函数G(s)=(100s+1)/(10s+1),则其频率特性的奈氏图终点坐标为( D)2分19、一般为使系统有较好的稳定性,希望相位裕量为( C)2分20、最小相位系统的开环增益越大,其()2分21、一阶微分环节G(s)=1+Ts,当频率ω=1/T时,则相频特性∠G(jω)为( )2分22、ω从0变化到+∞时,延迟环节频率特性极坐标图为( )2分23、开环传递函数为G(s)H(s)=(s+3)/(s+2)(s+5),则实轴上的根轨迹为(B)2分24、开环传递函数为G(s)H(s)=K/(s*s*s(s+4)),则实轴上的根轨迹为( )2分25、某单位反馈系统的开环传递函数为:G(s)=K/(s(s+1)(s+5)),当k=(C )时,闭环系统临界稳定.2分26、若系统增加合适的开环零点,则下列说法不正确的是(B ) 2分27、当二阶系统的根分布在根平面的虚轴上时,系统的阻尼比为(B)3分28、控制系统的稳态误差ess反映了系统的(A)2分29、当二阶系统特征方程的根为具有负实部的复数根时,系统的阻尼比为(C)3分30、二阶系统当0<ζ〈1时,如果增加ζ,则输出响应的最大超调量将(B )3分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精品文档就在这里 -------------各类专业好文档,值得你下载,教育,管理,论文,制度,方案手册,应有尽有-----------------------------------------------------------------------------------------------------------------------------------------
为( ) 不做
A.(-∞,-P2),[ -Z1,-P1] B. , p2 C. p, D. [-Z1,-P1]
4.对于欠阻尼的二阶系统,当无阻尼自然振荡角频率 n 保持不变时,( ) A.阻尼比 越大,系统调节时间 ts 越大
B.阻尼比 越大,系统调节时间 ts 越小
---------------------------------------------------------精品 文档 ---------------------------------------------------------------------
精品文档就在这里 -------------各类专业好文档,值得你下载,教育,管理,论文,制度,方案手册,应有尽有-----------------------------------------------------------------------------------------------------------------------------------------
函数。
14. Bode 图的低频段特性完全由系统开环传递函数中的积分环节数和
决定。
15. 如果要求系统的快速性好,则闭环极点应距离
越远越好。
16. 增加
点对系统的动态性能是不利的。
17. 如果系统中加一个微分负反馈,将使系统的超调量 %
。
---------------------------------------------------------精品 文档 ---------------------------------------------------------------------
9.已知单位反馈系统的开环传递函数为 G(S)= K ,若要求带宽增加 a S(TS 1)
倍,相位裕量保持不变,则 K 应变为( )
A. K/3a
B.K/a
C.aK
D.2ak
10. 已知离散控制系统结构图如图 1 所示,则其输出采样信号的 Z 变换的表达式
C(z)为( )不做
---------------------------------------------------------精品 文档 ---------------------------------------------------------------------
----------------
A.G(Z )R(Z ) B GR(Z ) 1 GH (Z ) 1 G(Z )H (Z )
C. G(Z )R(Z ) D. GR(Z )
1 G(Z)H (Z)
1 GH (Z )
11.
某单位反馈采样系统的开环脉冲传递函数为
G(Z)=
KZ (Z -
(1 e-T ) 1)(Z- e-T )
1.传递函数的概念适用于( )系统
A.线性、非线性 B.线性非时变 C.非线性定常 D.线性定常
2.系统的动态功能包括( )
A. 稳定性、平稳性
B.平稳性、快速性
C. 快速性、稳定性
D.稳定性、准确性
3.开环传递函数 G(S)= K (S Z1 ) ,其中 P2>Z1>P1>0,则实轴上的根轨迹 (S P1 )(S P2 )
精品文档就在这里 -------------各类专业好文档,值得你下载,教育,管理,论文,制度,方案手册,应有尽有-------------------------------------------------------------------------------------------------------------------------差 e( )为( )不做
A. 0
B.
C.1/K
12. 一级系统的阶跃响应,( )
D. T/K
A.无超调 C.当时间常数 T 较小时有超调
B.当时间常数 T 较大时有超调 D.有超调
得分 评卷人 复查人 二、填空题(每小题 1 分,共 12 分)
13. 随动系统中常用的输出信号是斜坡函数和
----------------
C.阻尼比 越大,系统调节时间 ts 不变
D.阻尼比 越大,系统调节时间 ts 不定
5.微分环节的频率特性相位移() 为( )
A.-180
B.0
C.-90
D.+90
6.Ⅰ型系统开环对数幅频渐近特性的低频段斜率为( )
A.-40(dB/dec)
B.-20(dB/dec)
精品文档就在这里 -------------各类专业好文档,值得你下载,教育,管理,论文,制度,方案手册,应有尽有-----------------------------------------------------------------------------------------------------------------------------------------
----------------
复核总分 复核人
200 年 月江苏省高等教育自学考试 272354601 自动控制原理
总分 合分人
题号 一 二 三 四 题 分 24 12 16 48 得分
得分 评卷人 复查人
一、单项选择题(每小题 2 分,共 24 分) 在下列每小题的四个备选答案中选出一个正确的答 案,并将其字母标号填入题干的括号内。
C.0(dB/dec)
D.+20(dB/dec)
7. 从 0 变化到+ ∝时,一阶不稳定环节频率特性的幅相特性极坐标图为( )
A.半圆
B.椭圆
C.圆
D.双曲线
8.惯性环节的对数频率特性相位移() 在( )之间。
A.0 和 90 C.0 和 180
B.0 和 -90 D.0 和 -180