正向仿真模型与反向软件ADVISOR的集成开发_曾小华
ADVISOR 二次开发方法介绍

开发步骤3
新模型的仿真验证
开发步骤3.1
双轴驱动混合动力汽车仿真
开发步骤3.3
双轴驱动混合动力汽车仿真结果
同时对比表1,2。混合动力BJ212汽车 比原传统的BJ212汽车具有更大的动力性, 而且还具有隐蔽行驶的特性,能使汽车以 50km/h行驶超过30km,并能为汽车提供 8.7kwh的能量(户外电站功能),即满足了军用车的 特殊要求。 同时通过对BJ212经济性能的仿真,发现其油耗由 原来的15L/100km下降到10.67 L/100km,降低了28.9%, 说明混合动力技术能很好的改善汽车的燃油经济性。
二次开发方法(结合实例)
例子: 基于ADVISOR软件的双轴驱动混合动力汽车性能仿真模块 的开发:汽车工程2003第五期
由于所研究的越野汽车为双轴四 轮驱动,需对其进行受力分析与 数学建模
开发步骤1
根据车辆动力学理论 建立双轴驱动的整车模型
开发步骤1.1
a
Fw Ff
F1
F2 α W2 Mg
W1
使用方法
首先打开MATLAB,正确设定其工作目录为: AdvisorPath。在MATLAB命令行输入:advisor,即可到其 启动界面,按Start按钮;进入到其主界面:整车参数输入界 面。 ADVISOR主要有三个界面:整车参数输入界面、仿真 参数输入界面和仿真运行结果界面。
基于多物理场耦合计算的仿真软件开发

基于多物理场耦合计算的仿真软件开发目录一、项目概述 (2)1. 项目背景介绍 (2)2. 研究目的与意义 (3)3. 项目目标及预期成果 (5)二、理论基础与相关技术 (6)1. 多物理场耦合理论基础 (7)1.1 物理场概念及分类 (8)1.2 耦合计算原理与方法 (9)1.3 数值计算理论 (11)2. 仿真软件设计技术 (12)2.1 仿真软件架构设计 (14)2.2 仿真算法选择与优化 (15)2.3 图形界面设计技术 (17)2.4 数据处理与可视化技术 (18)三、系统需求分析 (19)1. 功能需求分析 (21)1.1 多物理场建模功能需求 (22)1.2 计算分析功能需求 (23)1.3 结果展示与输出需求 (24)2. 性能需求分析 (26)2.1 计算精度要求 (27)2.2 运行效率要求 (28)2.3 稳定性需求 (29)四、仿真软件开发与实施计划 (30)一、项目概述随着科学技术的不断发展,多物理场耦合计算在工程领域中的应用越来越广泛,涉及航空航天、车辆工程、电子封装等多个领域。
为了提高多物理场耦合计算的准确性和效率,本项目旨在开发一款基于多物理场耦合计算的仿真软件。
该仿真软件将涵盖多个物理场,包括流体动力学、结构力学、热传导、电磁场等。
通过集成多物理场耦合算法,实现对复杂工程问题的高效、精确求解。
软件将提供友好的用户界面和丰富的接口,方便用户进行二次开发和应用。
本项目的目标是打破现有仿真软件在多物理场耦合计算方面的局限性,开发出一款具有高度灵活性和可扩展性的仿真平台。
通过该平台,用户可以方便地构建各种复杂的工程模型,进行多物理场耦合分析,从而提高产品设计质量,降低研发成本,缩短产品上市时间。
在项目实施过程中,我们将采用先进的计算机技术和算法,确保仿真软件的高效性和准确性。
我们将密切关注行业发展趋势和技术动态,不断优化和完善仿真软件的功能和性能。
1. 项目背景介绍随着科学技术的不断发展,多物理场耦合计算在工程领域中的应用越来越广泛。
6通用集成优化软件SiPESC_OPT的设计与实现_杨春峰
http ://www.chinacae.cn第20卷第4期2011年12月计算机辅助工程Computer Aided EngineeringVol.20No.4Dec.2011文章编号:1006-0871(2011)04-0042-07通用集成优化软件SiPESC.OPT 的设计与实现杨春峰,陈飙松,张盛,李云鹏,张洪武(大连理工大学工业装备结构分析国家重点实验室运载工程与力学学部工程力学系,辽宁大连116024)摘要:为实现针对复杂工程设计的具有通用设计目标和开放性的优化软件的自主研发,设计并实现面向通用优化计算需求的SiPESC.OPT 软件.讨论优化软件开发在优化算法、试验设计和替代模型等方面的需求;设计具有应用层、中间层和核心层的SiPESC.OPT 软件架构;根据该软件架构将SiPESC.OPT 的功能模块划分为优化任务设计模块、试验设计与近似模型模块、求解器模块、后处理模块和子系统集成模块等.引入优化模型状态类以解耦优化模型类与优化算法类之间密切的依赖关系.风力发电机叶片优化算例和水轮机模型替代算例表明,SiPESC.OPT 具有操作简单、功能全面和可扩展性强等特点,可用于复杂优化问题的求解.关键词:优化软件;SiPESC.OPT ;优化方法;可扩展性中图分类号:TB115文献标志码:B收稿日期:2011-03-18修回日期:2011-04-30基金项目:国家自然科学基金(90715037,11072050,10872041,91015003,51021140004);国家基础性发展规划项目(2010CB832704);国家高技术研究发展计划(“八六三”计划)(2009AA044501)作者简介:杨春峰(1972—),男,山东邹城人,博士研究生,研究方向为计算力学软件系统研发,(E-mail )yangchunfeng@mail.dlut.edu.cn ;陈飙松(1972—),男,广东佛山人,教授,博导,博士,研究方向为计算力学软件系统研发,(E-mail )bschen@dlut.edu.cn Design and implementation of general integrated optimization design software SiPESC.OPTYANG Chunfeng ,CHEN Biaosong ,ZHANG Sheng ,LI Yunpeng ,ZHANG Hongwu(Department of Engineering Mechanics ,Faculty of Vehicle Engineering and Mechanics ,State Key Laboratory of Structural Analysis for Industrial Equipment ,Dalian University of Technology ,Dalian 116024,Liaoning ,China )Abstract :To research and develop an optimization software with general purpose and openness for complex engineering design independently ,SiPESC.OPT is designed and implemented ,which can meet the general optimization computation requirements.The requirements about optimization software development ,such as optimization algorithms ,experiment design ,and surrogate model ,are discussed ;the software architecture of SiPESC.OPT is constructed with three layers :application layer ,middle layer and core layer ;according to the architecture ,SiPESC.OPT contains optimization task design module ,experiment design and approximation surrogate module ,solver module ,post-process module ,sub-system integration module ,and so on.By introducing optimization model state class ,the close dependent relationship between optimization model class and optimization algorithm class is decoupled.Wind turbine blade optimization example and hydraulic turbine surrogate model example demonstrate the capability ofSiPESC.OPT for solving complex optimization problems and its characteristics,including simple-operation,full-feature and high-extensibility.Key words:optimization software;SiPESC.OPT;optimization method;extensibility0引言最优化方法在自然科学、社会科学、国防、经济、金融、工程设计和现代化管理等许多领域有着广泛应用.[1]近几十年来,最优化方法在优化算法、优化问题和应用领域等方面发展迅速.优化算法由以梯度为基础的传统优化算法发展到智能优化算法,如遗传算法、模拟退火算法、人工神经网络算法、蚁群算法以及禁忌搜索算法等,并且在优化算法的基础上发展到优化策略的研究.软件是对客观世界中问题空间与求解空间的具体描述,是客观事物的一种反映,是知识的提炼和固化.[2]优化软件是最优化方法与优化设计实践之间的桥梁,是最优化方法在计算机中的具体实现.国际上已经出现很多专业优化软件以及包含优化功能的软件包,如iSight和DOT等;ANSYS与MSC Nastran等专业分析软件中也包含优化功能模块.针对日益复杂的工程设计问题,仍然需要研发具有通用设计目标、开放性的优化软件.[3]1优化软件系统的需求分析最优化方法是在一定的求解域内,在满足某些约束条件下寻找指定目标的最优解.优化软件是最优化方法与计算机科学结合的产物.优化软件的最终目的就是解决工程实践中的优化问题:首先将实际的工程问题抽象成包含一组数学解析表达式的优化模型,根据其特点选择合适的优化算法;然后优化计算,查看结果,如果对优化结果不满意,则调整优化模型进行新一轮计算,直至得到满意的结果.然而,工程实践中遇到的问题大部分是多学科、非线性、多准则、不可微的复杂系统优化问题,有时无法抽象出显式的数学解析表达式,这时需借助试验设计等方法培养出替代模型,进而生成优化模型,再对其进行优化求解.1.1优化模型一般的最优化问题是在满足约束条件gi(x)≤0,i=1,2,…,mh i (x)=0,i=m+1,…,{p求向量x,使函数f(x)取极小值(或极大值).其中,f(x)为目标函数,gi (x)≤0为不等式约束条件,hi(x)为等式约束条件.x=(x1,x2,…,xn)T为设计变量或决策变量,是n维实欧拉空间内的一点,称满足约束条件的点为可行点,称所有可行点的集合为可行域.f(x),g i(x)(i=1,2,…,m)和h i(x)(i=m+1,…,p)为给定n元函数[4].最优化问题一般写成min f(x)s.t.g(x)≤0,i=1,2,…,mh(x)=0,i=m+1,…,{p优化模型是从工程实践中抽象出的最优化问题,是从可行域到其目标函数值域的映射.对于复杂的实际工程问题,目标函数、约束的数量大,没有解析表达式且具有高度非线性、不连续和不可微等特性,不仅求解困难,计算量大,而且建立优化模型的难度也很大,最优化问题的一般形式难以涵盖全部特征信息.这要求优化软件应能提供完备的建模能力:不仅要有基本的函数定义功能,而且要提供方程求解、第三方软件启动、数据处理以及文本文件解析等功能.1.2优化算法优化算法是在优化模型的可行域内寻找使优化模型满足最优条件的可行点.针对不同类型的优化问题,人们提出多种优化算法,如对于线性规划问题,最常用的方法是单纯形法和对偶单纯形法;对于单目标、无约束的优化问题,BFGS法行之有效;对于单目标、有约束的优化问题,序列线性规划法和序列二次规划法比较流行.近年来又出现模拟生物进化、退火等自然机理的遗传算法.每种优化算法都有其优点及其应用范围的局限性,到目前为止,还没有一种对非线性优化问题普遍适用的有效算法.对于实际工程问题,需要将多种优化算法对比、组合使用,才能得到满意的结果.优化软件的主要任务之一是为用户提供丰富的优化算法,使用户有充分的选择余地,通过对比不同的算法,选择最合适的.近年来,最优化方法发展迅速,新的优化算法不断出现,优化软件应具有开放的、可扩展的软件架构和软件组件接口以及具有动态、无缝添加新优化算法的能力,从而丰富软件的算法库.1.3试验设计和替代模型在工程实践中遇到的问题大多属于复杂系统的34第4期杨春峰,等:通用集成优化软件SiPESC.OPT的设计与实现http://www.chinacae.cn优化问题,有时无法抽象出显式的数学解析表达式,需借助试验设计等方法培养出替代模型,进而生成优化模型,然后进行优化求解.替代模型指在不降低精度的情况下构造的一个计算量小、计算周期短但计算结果与数值分析或物理试验结果相近的数学模型.构造替代模型一般需要3个步骤.(1)通过试验设计方法在设计空间中确定构造模型所用的样本点.(2)利用分析软件或试验方法确定各样本点处的响应值.(3)根据样本点数据选择一种近似方法,构造合适的代理模型,并取设计空间内的一些点对模型进行检验,以便调整某些参数.构造替代模型的逼近精度很大程度上取决于试验点在设计空间中的位置分布,因此试验点的选择应当遵循一定的准则,以便只取较少的点就能达到较高的精度,这就是试验设计(Design of Experiment)所研究的内容.常用的试验设计方法有正交试验设计、均匀试验设计、析因试验设计和中心复合试验设计等.2SiPESC.OPT系统设计SiPESC.OPT是由大连理工大学与中国空间技术研究院自主研发的开放的通用优化问题求解软件,用于求解单目标或多目标、连续设计变量或离散设计变量、线性或非线性的大规模复杂优化问题.[5]SiPESC.OPT包含试验设计、近似模型模拟、灵敏度分析、子系统集成和文本文件解析等多种先进功能模块;BFGS,SLP,SQP和GA等多种成熟优化算法;提供均匀试验设计、正交试验设计、中心复合试验设计和析因试验设计等试验设计方法;响应面法、多二次径向基函数、高斯径向基函数和逆多二次径向基函数等近似模型拟合方法.SiPESC.OPT具有良好的可扩展性,基于开放式的软件架构,可将其优化算法等功能模块动态添加到软件中,使用户可以按照实际问题的特性定制自己的优化算法.同时,SiPESC.OPT也是一款简单易用的优化问题求解器,支持MD Nastran,ANSYS和Abaqus等多款主流分析软件.SiPESC.OPT具有友好的图形用户界面和灵活的脚本语言界面:通过图形用户界面,用户可方便、快捷地构建优化模型,制定优化任务,设计试验方案,生成近似模型,运行脚本语言文件和查看计算结果,完成复杂结构的设计优化流程;通过脚本语言界面,用户可将结构分析、优化计算、子系统集成和计算结果提取等功能灵活组合,实现复杂结构的设计分析、优化计算工作流程自动运行,同时能在集成优化软件系统运行时修改工作流程,不但提高计算效率,而且可减少人工操作出错的可能性.2.1软件架构SiPESC.OPT优化软件的软件架构分为应用层、中间层和核心层等3层.如图1所示,应用层提供优化建模的工具和界面,用户利用该层进行系统建模;中间层以JavaScript为软件的脚本语言界面,使用脚本语言的变量、函数、逻辑及扩展功能等模块定义复杂的优化模型和优化任务;核心层实现脚本语言解析、优化模型计算及任务管理等扩展功能模块.图1软件架构Fig.1Software architecture3SiPESC.OPT系统实现3.1SiPESC.OPT软件结构软件系统结构见图2,软件系统的主程序是Optimization.exe,根据文件config.xml中的内容配置软件系统参数,如系统图形界面参数和版本号等.projects.xml中保存用户设计的优化模型以及与优化模型相对应的优化算法.软件系统将优化项目转换为project.js脚本文件输入到优化器solver.exe,优化器根据脚本文件中的语言命令调用优化算法库(如Dot.dll)完成优化迭代计算,并将迭代过程的中间结果保存到优化数据库OptimizationDB中.主程序调用OptimizationDB中存放的迭代过程数据,根据需要转换为图表形式供用户查看.在系统运行过程中,主程序将用户的重要操作、系统的重要活动以及警告、出错信息记录到日志文件log.txt中.44计算机辅助工程2011年http://www.chinacae.cnhttp ://www.chinacae.cn图2软件系统结构Fig.2Software structure3.1SiPESC.OPT 软件功能模块根据软件架构设计,将软件系统划分为优化任务设计、试验设计与近似模型、求解器、后处理和子系统集成等5个主要功能模块,见图3.图3功能模块Fig.3Functional modules优化任务设计模块提供程序的主窗口以及定义优化任务的图形界面,分为优化任务配置、优化模型数据和解析器、软件系统图形界面、数据模型管理、脚本语言预处理和寄存器等6个子功能模块.(1)优化任务配置模块提供配置优化任务的图形界面并将优化任务数据通过数据模型管理模块保存到优化模型数据和解析器模块中.(2)优化模型数据和解析器模块的主要功能是将优化任务保存为XML 格式的文本文件以及解析XML 格式的文本文件,从中提取优化任务并转换为软件系统内部的数据格式,供软件系统其他功能模块使用.(3)软件系统图形界面模块主要实现软件系统用户界面的框架.(4)数据模型管理模块管理软件系统的优化任务数据.(5)脚本语言预处理模块是在优化任务转换成脚本语言文件前,将优化任务转换成相应的脚本语言格式.(6)寄存器模块保存软件系统运行时所需的全局变量.后处理模块实现数据管理的可视化功能,对优化迭代计算过程中的数据用曲线的方式进行描述,包括曲线的多种定义方式(颜色、实线、虚线和点划线等),并提供数据的格式化输出功能(自定义文本格式和Excel 表格).后处理模块主要用图表的形式展示优化迭代历史.子系统集成模块是操作数值模型分析软件(如ANSYS )的输入输出文件,定义设计变量、模型参数及响应和指标(包括约束条件或目标函数)的函数关系,完成模型修改、分析与分析结果的提取.对难以给出显式函数的复杂模型,提供基于多项式响应面法的复杂系统替代模型(近似方法)计算方法:使用与设计方案相对应的数值模型分析结果或试验结果构造模型的替代模型,供用户使用.求解器模块解析执行脚本语言文件,并将优化迭代结果保存到数据库中,供后处理模块使用.求解器模块主要解析JavaScript 脚本文件,并执行脚本文件中的命令.3.2SiPESC.OPT 软件技术根据优化软件系统需求分析,可从最优化方法中提取出2个基本概念:优化模型和优化算法.优化模型的实质是从其可行域到其目标函数值域的映射,构造优化模型的主要方式是定义其设计变量的类型和上下限,目标函数的解析表达式,约束的解析表达式以及相关梯度的解析表达式.优化算法的主要功能是根据优化模型的设计变量、目标函数和约束函数的当前值等信息,寻找新的迭代点以更新优化模型,完成迭代计算流程.可以把一个优化模型和一个优化算法组合成一个优化任务.使用面向对象方法将优化模型集合、优化算法集合和优化任务集合分别抽象成优化模型类(Model )、优化算法类(Algorithm )和优化任务(OptProject )类,进而以这几个类为核心数据结构构建集成优化软件系统,见图4.一个优化模型类包括一个优化模型名,一个或多个目标函数,多个约束函数(无约束优化模型则不包含约束函数)以及一个或多个设计变量.一个优化算法类包括一个优化算法名,一个或多个优化算法参数.优化任务类通过优化模型名与优化模型相联系,通过优化算法名与优化算法相联系.54第4期杨春峰,等:通用集成优化软件SiPESC.OPT 的设计与实现http ://www.chinacae.cn图4核心数据结构Fig.4Core data structures最优化方法发展至今,优化模型概念的内涵和外延已经很稳定,因此可以设计一个接口比较完备的优化模型类;但不同优化算法的差别较大,而接口变化不大.使用面向对象方法的继承机制,可构造一个抽象优化算法类,具体的优化算法可由抽象算法类派生而来.然而,继承机制将抽象类接口与派生类接口强制关联,派生类的接口难以重用、扩展和修改抽象类接口,新优化算法类也难以通过继承抽象优化算法类进行扩展,限制软件的可扩展性.在寻找新迭代点过程中,优化算法需提取优化模型的设计变量值、优化目标值和约束值等,有的算法会需要优化模型在当前迭代点的梯度值.目前,难以预测新优化算法对优化模型提出的新要求.优化模型与优化算法之间紧密联系,使二者之间存在紧密依赖关系,新优化算法类(New Algorithm )的扩展和修改会引起优化模型类的修改,这种紧密联系限制软件的可扩展性.解除这种依赖关系是保证集成优化软件系统可扩展性的关键.在优化计算中,单就一个具体的优化算法而言,在迭代寻优过程中所需的输入信息不是目标函数的解析表达式和约束的解析表达式,而是优化模型的设计变量值、目标函数值和约束值等信息,即优化模型状态.它的输出也是优化模型状态.使用面向对象方法抽象出一个优化模型状态类(ModelState ),其主要功能就是维护一个管理标志符与数值的简单映射表.优化模型状态类的功能简单、接口单一,其扩展性较强.优化模型状态类切断优化模型类与优化算法类之间的紧密依赖关系.图5为集成优化软件系统核心类图,可知优化算法类、优化模型状态类和优化模型类之间的关系,优化算法类依赖于优化模型状态类,不再与优化模型类有联系,因此优化算法可不使用继承机制,而是自由扩展.图5核心类Fig.5Core classes3.3SiPESC.OPT 用户图形界面软件的图形用户界面包括菜单栏、工具栏、优化任务栏、运行结果栏、状态栏和优化任务浏览器等.优化任务栏使用树状图显示优化任务文件中优化任务的主要内容;运行结果栏显示优化任务的运行结果以及运行过程中的状态信息等;状态栏显示当前软件的状态信息;优化任务浏览器显示优化任务的详细内容.点击系统初始界面左上角的新建图标进入优化任务配置界面,用户可分别设置任务名称、优化模型名称和算法名称,并选择算法类型.试验设计和替代模型窗口用于设计试验方案并生成替代模型,用户通过此窗口可进行选择试验方法、设定设计变量水平值、选择替代模型方案以及读入试验数据等操作.3.4系统使用样例三杆桁架优化问题是结构优化设计中的经典样例,三杆桁架尺寸见图6.优化目标是使所有杆件的体积最小.设计变量x 1和x 2分别为杆1(与杆3相同)和2的截面积,约束条件是在载荷P 1作用下,杆1和2的拉伸应力小于许用应力2MPa.优化结果为:x 1=0.7867mm 2,x 2=0.41375mm 2.优化流程见图7.图6三杆桁架Fig.6Three-bar truss64计算机辅助工程2011年http ://www.chinacae.cn(a )配置优化任务(b )浏览优化任务(c )优化(d )查看优化结果图7三杆桁架优化流程Fig.7Three-bar truss optimization solution flow4工程优化算例4.1风力发电机叶片优化算例大型风力发电机叶片基本采用蒙皮和主梁的构造形式,本文研究的风力发电机叶片主梁为12层玻璃钢复合材料,有限元模型见图8,主梁从叶片根部图8风力发电机叶片有限元模型Fig.8Finite element model of wind turbine blade到叶端分为2段,铺层纤维分布角度均为[0/0/0/0/45/45/-45/-45/0/0/0/0]T.叶片蒙皮铺层数为12层玻璃钢复合材料,如图8所示,从叶片根部到叶端共分为5段,铺层角度分布为[ʃ45/0/0/0/90/0/90/0/0/ʃ45]T.如果将主梁和蒙皮均分为上、下两侧,为减少计算时间,可假设上、下两侧层合板中纤维角度和铺层厚度相同,各铺层厚度的上、下限均为0 0.2mm.基于SiPESC.OPT 优化软件,编写用于风力发电机优化分析的JavaScript 脚本语言文件.风力发电机优化流程为:首先创建发电机叶片优化模型;使用SiPESC.OPT 文本文件解析模块更新输入文件中的设计变量值,调用计算程序(如Abaqus )计算叶片有限元模型;解析计算结果文件,提取叶片端部挠度值和叶片质量,统计叶片有限元模型中破坏单元数量,计算优化目标;SiPESC.OPT 的遗传优化算法模块根据设计变量值和目标函数值判断是否达到优化终止条件,如果满足条件,则优化结束,如果不是,则寻找新的设计点,更新输入文件,进行下一个优化迭代步.具体脚本语言代码如下://创建风力发电机叶片优化模型var theModel =new OptModel ;...//设置风力发电机叶片优化模型的设计变量theModel.setVariable ("cl_1_0",0.09);theModel.setVariable ("cl_1_0",Array (0.01,0.02,0.03,0.04,0.05,0.06,0.07,0.08,0.09,0.10,0.11,0.12,0.13,0.14,0.15,0.16,0.17,0.18,0.19,0.20));...//设置优化算法参数DGA.setMINMAX (-1);DGA.setGENERATION (100);DGA.setPOPULATIONSIZE (30);DGA.setMUTATIONPROBABILITY (0.1);DGA.setCROSSOVERPROBABILITY (0.8);var Solver =DGA ;//初始化优化算法对象Solver.initialize (theModel );//开始优化迭代计算do {eval ();ModelSaver.save (theModel );Solver.renewModel (theModel );}while (!Solver.isComplete ())使用DELL T5500型工作站,双CPU ,8核,6GB 内存,1.5TB 硬盘,使用8进程并行计算,经过1005次迭代,优化方案比初始方案的叶片质量减少7kg ,叶片端部挠度降低29mm ,达到减轻叶片质量、提高叶片刚度的优化目标.4.2水轮机替代模型算例水轮机的水力和运行参数直接影响水轮机组的运行安全和经济效益.水轮机的力矩和流量等特性是一个多输入、多输出的非线性系统,目前难以用数学解析表达式进行完整描述.在水电站设计中,水轮机选型以及确定其基本参数和运行条件时,都需要分析水轮机性能.水轮机特性资料大多以特性曲线形式给出,目前国内外普遍采用出厂模型试验,然后依据相似性理论确定原型水轮机的水力性能并计算出水轮机特性.但是,这种方法得到的水轮机特性误差较大.对水轮机做现场能量特性试验,可得到在有限个试验水头条件下水轮机的输出功率和流量等参数,并绘制出特性曲线.水轮机特性曲线传统的绘制方法是根据获得的试验数据手工绘制,使用传统方74第4期杨春峰,等:通用集成优化软件SiPESC.OPT 的设计与实现法手工绘制误差大、效率低;根据水轮机试验的实测数据,利用计算机技术建立水轮机能量特性的近似模型,可大大提高处理效率和精度.基于径向基函数,使用SiPESC.OPT软件,根据水轮机现场能量试验数据[6],建立水轮机综合特性的近似模型.多种近似模型的平均误差见表1.表1多种近似模型平均误差Tab.1Surrogate models’mean errors多种模型万家寨水电站3号机组能量特性万家寨水电站2号机组振动特性3阶响应面近似模型1.43034.600多二次径向基函数近似模型0.0375.70E-3高斯径向基函数近似模型5.78E-51.25E-4逆二次径向基函数近似模型3.02E-48.27E-6水轮机特性的径向基函数近似模型能真实表达水轮机的特性,计算简便且可以得到近似模型的解析表达式,为进一步利用优化算法优化水轮机的水力参数和运行参数,提高水轮机组的安全性能和经济效益提供良好基础.5结束语(1)具有通用性和开放性的优化软件可广泛应用于复杂的实际问题.(2)通用优化软件SiPESC.OPT具有操作简单、功能全面、可扩展性强等特点,可用于复杂优化问题的求解.(本文获计算机辅助工程及其理论研讨会2011(CAETS2011)优秀论文奖.)参考文献:[1]袁亚湘.最优化理论与方法[M].北京:科学出版社,1997:1-2.[2]杨芙清.软件工程技术发展思索[J].软件学报,2005,16(1):1-7.YANG Fuqing.Thinking on the development of software engineering technology[J].J Software,2005,16(1):1-7.[3]MAROS I,KHALIQ M H.Advances in design and implementation of optimization software[J].Eur J Operational Res,2002,140(2):322-337.[4]唐焕文.实用最优化方法[M].大连:大连理工大学出版社,2000:8-9.[5]张洪武,陈飙松,李云鹏,等.面向集成化CAE软件开发的SiPESC研发工作进展[J].计算机辅助工程,2011,20(2):39-49.ZHANG Hongwu,CHEN Biaosong,LI Yunpeng,et al.Advancement of design and implementation of SiPESC for development of integrated CAE software systems[J].Comput Aided Eng,2011,20(2):39-49.[6]张文玉.基于运行数据的水轮机建模及应用[D].邯郸:河北工程大学,2008.(编辑陈锋杰檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿)中国商飞引进COMSOL Multiphysics助力我国航空工业CAE发展2011年11月30日,中仿科技公司与中国商用飞机有限责任公司(以下简称中国商飞)达成工程仿真解决方案合作项目协议:中仿科技公司为中国商飞提供包括COMSOL Multiphysics在内的多物理场耦合分析解决方案,加速中国商飞在飞机计算结构力学、气动计算、闪电模拟、雷击仿真、空气动力学、材料力学和电磁学等航空工程应用领域的发展.随着国内航空业的发展,自主研制的飞机将越来越多,对CAE软件的需求也将会越来越旺盛,中国商飞与中仿科技公司的本次合作加深COMSOL Multiphysics在中国航空领域的应用.近年来,随着用户对多物理场耦合分析需求的增强,COMSOL Multiphysics在各个行业内的应用越来越广泛.84计算机辅助工程2011年http://www.chinacae.cn。
中科院电路与系统导师研究方向
主要研究方向系统级芯片(SOC)设计方法研究用于系统芯片的EDA工具算法研究及实现超大规模集成电路与系统设计深亚微米和微波IC及电网络的理论、分析、计算机仿真电子电力器件及其集成目前正在重点进行以下几个方面研究工作:1、系统级芯片(SOC)设计方法研究进入二十一世纪,微电子工艺技术己进入超深亚微米阶段,目前集成电路的特征线宽已达到0.18um,已完全有能力将信息采集、加工运算、存贮和随动执行这样的超大规模信息系统集成并固化在芯片上,即SOC(System On Chip)。
根据国际微电子技术的发展现状和趋势分析,以超深亚微米(VDSM)和IP复用(Reuse)技术为支撑的微系统芯片(SOC)在世纪之交正在迅速发展,并将在新世纪成为集成电路技术的主流,这是我国集成电路产业发展十分难得的历史机遇。
我们当前急需去实现的是要抓住SOC发展的这一机遇,突出集成电路设计,加强与网络通信、信息安全和关键电子信息产品整机发展相结合,形成掌握自主知识产权的SOC设计能力和相应的高效服务体系,带动并支持我国集成电路行业的跨越式发展。
超大规模集成电路技术及应用研究正是将重点放在自主开发品种较全并有一定数量的可供嵌入的IP核和典型SOC芯片设计研究上;同时着力掌握以软硬件协同设计、IP复用和VDSM关键设计工具为代表的SOC设计技术;还要积极研究未来SOC新工艺、新器件和可靠性等关键支撑技术,实现我国超大规模集成电路技术的跨越发展。
2、EDA工具算法研究及实现目前,我们的工作重点放在后端工具的开发,主要是面向互连的布线方法学研究与实现。
正在从事或申报的课题有:“超深亚微米工艺条件下的关键线网布线技术研究”,“基于光学校正的超深亚微米IC物理设计优化技术研究”,“IC单元电路逻辑参数提取工具”,“单元电路的逻辑同构识别技术研究”等。
3、深亚微米和微波IC及电网络的理论、分析、计算机仿真随着互连线效应影响的越来越显著,这一方向的研究将有重大的意义,我们正在开展三地七校下一代超深亚微米VLSI设计方法学研究课题:“超深亚微米VLSI中电感参数提取”,而“基于网络快速模拟的电子器件建模”是与Transim/Cadence的合作项目。
ADVISOR2002使用入门
ADVISOR2002使用入门说明:软件来之不易,在很多网友的帮助下才得到的,非常感谢武汉理工的同学无私帮助;软件花了很多心思才基本掌握,希望能对大家入门有一点点帮助。
软件不需要安装,在matlab6.1平台上使用,如果matlab版本高了的话则需要一个插件。
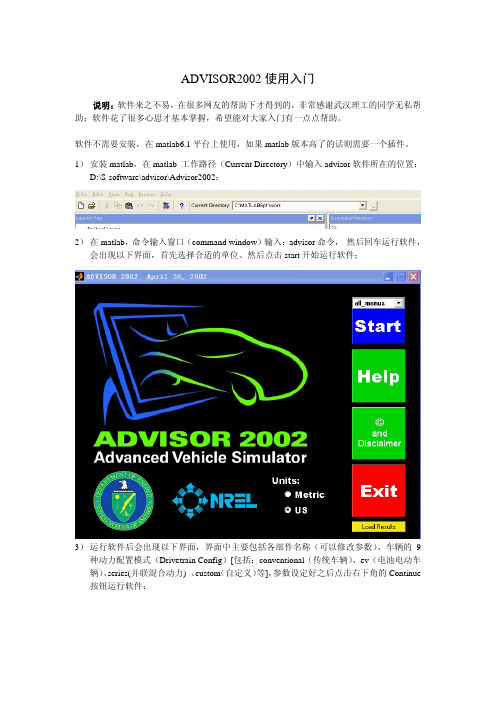
1)安装matlab,在matlab 工作路径(Current Directory)中输入advisor软件所在的位置:D:\S-software\advisor\Advisor2002;2)在matlab,命令输入窗口(command window)输入:advisor命令,然后回车运行软件,会出现以下界面,首先选择合适的单位、然后点击start开始运行软件;3)运行软件后会出现以下界面,界面中主要包括各部件名称(可以修改参数)、车辆的9种动力配置模式(Drivetrain Config)[包括:conventional(传统车辆)、ev(电池电动车辆)、series(并联混合动力) 、custom(自定义)等],参数设定好之后点击右下角的Continue 按钮运行软件;4)点击Continue按钮运行软件之后会出现以下界面,这个界面主要设置试验工况(Drive Cycle)——其中CYC-UDDS图形表示CYC-UDDS工况下速度与时间之间的关系,界面左边浅黄色图表中的数据表示CYC-UDDS工况下一些具体参数,选择好所需要的工况模型之后,设置试验目标(点击界面右边浅黄色按钮)5)点击界面右边浅黄色按钮之后会出现以下界面,可以设置加速时间、最高车速、在一定时间内可以运行的最长距离、在一定距离内所需要的最短时间、最大加速性能、最高车速等。
设置好之后,需要选定(前面方框中选中)点击OK。
6)点击界面右边浅黄色按钮之后会出现以下界面,界面主要是设置爬坡度——以某一车速行驶一定的时间所能爬的最大坡度。
需要注意的是这里无论选用哪种单位标准,这里车速都是英里每小时,注意换算。
基于ADVISOR的混合动力电动汽车再生制动控制策略的研究
第27卷 第4期2010年8月黑龙江大学自然科学学报J OURNAL OF NATURAL SC IENCE O F HE I LONG JI ANG UN IVERS I TY V o l 27N o 4A ugust ,2010基于ADV ISOR 的混合动力电动汽车再生制动控制策略的研究张 宇1, 周美兰1, 王旭东1, 卢显淦1, 袁 博2(1.哈尔滨理工大学电气学院,哈尔滨150040;2.华南理工大学机械与汽车工程学院,广州510640)摘 要:针对混合动力汽车仿真软件ADV ISOR 中原有制动力分配策略的不足,在其再生制动模型基础上,从动力学角度建立了各制动力制动份额随载荷变化的模型,并将所提出的策略在AD V I SOR 软件中对哈飞样车进行了仿真。
仿真结果表明所提出的控制策略回收制动能量的效果优于原有的再生制动控制策略,排放也有所改善,电机效率明显提高,同时这种分配方式也符合制动力法规的分配要求;并通过试验进一步验证了该策略的合理性。
此模型有效地拓展了ADV I SOR 的仿真范围,方便了对混合动力电动汽车的研究。
关键词:混合动力;ADV I SOR ;再生制动;载荷变化;仿真中图分类号:TP273文献标志码:A 文章编号:1001-7011(2010)04-0551-06收稿日期:2009-12-26基金项目:教育部科学技术研究重点资助项目(208037)作者简介:张 宇(1984-),女,硕士,主要研究方向:汽车电子技术及其仿真分析通讯作者:周美兰(1962-),女,教授,博士0 引 言随着汽车产量的迅速增长,汽车耗油量占全部石油产量的份额越来越大。
再生制动是目前混合动力汽车回收制动能量采取的普遍技术,电动汽车、混合动力汽车与传统汽车的一个最重要的区别是可以实现再生制动,能回收一部分传统车辆在制动过程中损失的能量,这样大大提高了汽车燃油经济性,节约能耗[1]。
本文在汽车仿真软件ADV ISOR 的基础上构造了再生制动过程中制动力分配的仿真模型并进行了仿真实验,结果表明所提出的方法可使车辆在行驶过程中能量回收效率提高,有害气体排放也有所降低。
纯电动汽车动力系统参数匹配及仿真研究
科技风2021年6月机械化工DO/10.19392/kd1671-7341.202117075纯电动汽车动力系统参数匹配及仿真研究韩宁梁作华刘婷聊城职业技术学院山东聊城252000摘要:纯电动汽车动力系统参数匹配及仿真研究是其设计开发中的一个重要环节,主要工作是根据预设的电动汽车性能指标,对动力系统的主要部件进行选型,以及动力参数的匹配和仿真,本文利用电动汽车仿真软件ADVISOR进行仿真,根据仿真结果,对纯电动汽车进行动力性和经济性分析,仿真数据显示所匹配的动力系统参数基本满足设计要求。
关键词:纯电动汽车;动力系统;ADVISOR;仿真尽管汽车为人类现代生活提供了巨大的方便,但随着汽车数量的逐年增加,也造成了巨大的能源和环境问题。
纯电动汽车是以可充电电池作为动力源,由电机驱动,因此其具有环保无污染、噪声低、能源利用率高等显著特点,在能源环境问题日益严峻的今天逐渐受到了汽车行业的重视。
纯电动汽车动力系统参数匹配主要是指在满足整车动力性和经济性的基本要求下,合理匹配动力系统中各部件的类型和参数。
纯电动汽车动力系统相关参数的设计与匹配对整车性能有着非常显著的影响,合理的参数匹配可以有效地改善纯电动汽车在各种工况下行驶时的性能。
1纯电动汽车动力系统参数的匹配设计1.1纯电动汽车的性能指标根据国家标准GB28382-2012、GB18385-2001以及GB18386-2001中对纯电动汽车的动力性能、经济性能的相关技术要求,本论文提出了某纯电动汽车的基本性能指标,如下表所示。
性能指标参考值最高车速>120km/h加速时间0〜50km/m加速时间<8s 0〜100km/m加速时间<15s最大爬坡度25%(车速为20km/h)续驶里程#120km(60km/h匀速行驶)1.2电机类型选择及参数匹配设计对纯电动汽车电机进行匹配主要是对电机类型进行选择,对电机功率的计算以及转矩转速的确定。
1.2.1电机的类型选择驱动电机的选择对纯电动汽车的性能有很大影响,不仅需要满足汽车运行时的基本性能,还应当满足汽车行驶时的舒适性、环境适应性等要求。
基于Visio的核电仪控设计出图仿真工具的开发
绘图软件Visio 是目前核电仪控系统设计阶段绘制控制逻辑图的主要工具。
若要对设计绘制出的Visio 图进行逻辑组态功能调试验证,通常需交付相关仿真平台(如RINSIM [1]等系统)。
通过这些工业级别的仿真平台对仪控系统进行组态验证分析这一过程十分复杂,要经过图形转换、数据库加点、连接数学模型、开发通信程序等步骤,过程繁琐,无法满足快速验证局部系统正确性、灵活修改系统参数的要求。
本文结合核电仪控设计在出图前能对系统局部仿真以验证系统功能的实际需求,基于Visio 的Automation 技术实现了Visio 界面与后台程序之间的数据交互,开发Visio 软件出图的仿真功能,为设计阶段快速出图、即时仿真提供了新工具。
1Visio 二次开发Visio 的二次开发能力也称为Automation ,是基于COM (组件对象模型)的一种不同程序相互集成的技术[2]。
它允许开发人员使用VB 、C 、C ++等支持Automation 的编程语言编写程序嵌入到Visio 软件中,也允许将Visio 作为图形引擎,嵌入到外部软件中,从而缩短开发周期。
开发人员可以通过创建Visio 加载项(Add -on )的方式扩展Visio 的功能,这种机制可以通过以下两种方法来实现:①使用C /C++等语言编写VSL 代码并编译成.vsl 文件;②使用任意可创建.exe 自动化客户端的语言编写代码并生成独立的可执行文件。
其中,VSL 实际上就是Visio 专用的一种动态链接库(DLL )[2]。
当Visio 在文件路径或启动项中搜索到.vsl 环境配置文件时,会自动将该文件加载到Visio 实例的进程空间中,因此.vsl 文件在Visio 进程内运行,而.exe 文件在Visio 进程外独立运行,这也是两种Add-on 加载项实现方法的最根本的区别。
本文采用VSL 方法对Visio 软件进行二次开发,具有扩展性强、交互能力强和运行效率高等优点。
正向仿真模型与反向软件ADVISOR的集成开发
2007年(第29卷)第10期汽 车 工 程Aut omotive Engineering2007(Vol .29)No .102007197正向仿真模型与反向软件ADV I S OR 的集成开发 原稿收到日期为2006年7月25日,修改稿收到日期为2006年11月24日。
曾小华1,王庆年2,李 胜3,王伟华2(11吉林大学,汽车动态模拟国家重点实验室,长春 130025; 21吉林大学汽车工程学院,长春 130025;31一汽解放青岛汽车厂,青岛 266043)[摘要] 混合动力汽车仿真软件ADV I S OR 是一种反向仿真软件,介绍在ADV I S OR2002平台下如何通过修改进行正向仿真软件的开发,并嵌入到其G U I 平台下进行仿真。
仿真结果表明,在ADV I S OR 平台下可以进行正向模型的仿真,这对实际混合动力控制策略的开发具有重要意义。
关键词:ADV I S OR;混合动力汽车;控制策略;正向仿真Devel opment of For ward Si m ulati on Model in ADV I S OR2002Zeng X i a ohua 1,W ang Q i n gn i a n 2,L i Sheng 3&W ang W e i hua211J ilin U niversity,S tate Key Laboratory of A uto m obile D ynam ical S i m ulation,Changchun 130025;21College of A uto m obile Engineering,J ilin U niversity,Changchun 130025; 31Q ingdao Auto Factory of FAW J iefang,Q ingdao 266043[Abstract] A sche me for utilizing the reverse s oft w are ADV I S OR t o conduct f or ward si m ulati on is p resented in this paper .Specifically,the f or ward si m ulati on modules in ADV I S OR2002are modified and then e mbedded int o its graphic user interface (G U I )p latf or m s o that the f or ward si m ulati on can be perfor med .The results show that the sche me is feasible,having great significance for the devel opment of real contr ol strategy f or hybrid electric vehicle .Keywords:AD V I S O R;Hybr i d electr i c veh i cle;Con trol stra tegy;Forward si m ul a ti on前言混合动力汽车在节能和降低排放方面的优越性在国内外引起了一个新的研究热潮[1-2]。
正向仿真模型与反向软件ADVISOR的集成开发
关键词 : D IO 混合动力汽车; A VS R; 控制策略 ; 正向仿真
De eo me to o wad S mu ain Mo e n ADVI OR 0 2 v lp n fF r r i lt d li o S 2 0
Z n a h a , n n na L h n 。 W a gW e u e gXio u Wa gQig in , i e g & S n i a h
1 J i U i rt,tt KyL brtr uo oi y a i l i l in h n cu 10 2 ; .in nv sy Sae e aoaoyo tm beD n mc muao ,C a gh n 3 0 5 l e i fA l aS t 2 C lg A t bl E gnen ,J i n rt,C ag h n 10 2 ; 3 Qnd oA oF c r . oeeo uo i nier g inU i sy h n cu 3 0 5 l f mo e i l e v i . i a u aty o g t o f Jfn Qn d o 6 0 3 ia g, ig a 2 6 4 e
维普资讯
汽
车
工
程
2 7 第2 卷) 1 期 0 年( 9 第 0 0
At o ! ! um t 里塑 璺 o i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
软件的开发尤为重要, 国外已经开发出很多仿真软 件 , 其中 ADV ISOR 是一种 比较优秀的车辆研究分 析工具。它可用于车辆传动方案的性能分析
[ 3]
。
ADV ISOR 软件也有其自身的缺点 , 如它只适合 于单轴驱动车辆的仿真。由于 ADV ISOR 软件代码 开放的特点 , 文献 [ 4] 已对其进行二次开发, 以嵌入 双轴驱动模块库用来补充对四轮驱动汽车的仿真。 另外 ADV ISOR 是一反向仿真软件 , 和实际课题的 控制思想有很大的差别 , 因此文献 [ 5] 开发了一正 向仿真模块 , 并同时开发了用来嵌入该仿真模块的 GU I 平台 CH EV 2002 , 从而对 整车 进行 性能 仿真。 CH EV2002 和 ADV ISOR 相比 , 其代码不够开放, 不 目前混合动力汽车仿真有两种基本方法, 即后 向仿真 ( backw ard -fac ing veh icle si m u lation)和前向仿 真 ( for w ard - facin g veh icle si m u la t io n), 分别如图 1 和 图 2 所示。国内也称后向仿真为 逆向 或 反向 仿真 , 称前向仿真为 正向 仿真
in this paper . Spec ifically, th e for w ard si m u lation m odules in ADV ISOR2002 are m odified and then em bedded into its graphic user in terface ( GU I) p latfo r m so that the for w ard si m u latio n can be perfor m ed. T he resu lts show that the sche m e is feasib le , hav ing great sign if icance for the developm en t of rea l contro l stra tegy for hybrid electric veh icle . K eyw ord s : ADV ISOR; Hybrid electric veh icle ; Contro l strategy ; Forw ard si m u lation 易增加多种模块, 并且它只是用加速踏板和制动踏
关键词 : ADV ISOR; 混合动力汽车 ; 控制策略; 正向仿真
D evelopm ent of Forw ard S i m ulation M ode l i n ADV ISOR2002
Zeng X iaohua , W ang Q ingn ian , L i Sheng & W ang W eihua
图 4 某一混合动力客车 CRU ISE 仿真模型
但该正向模型是一款商用的仿真软件 , 由于其 代码不公开, 不适合自主掌握与开发。
2 正向仿真模块的改进
如上所述, 利用 ADV ISOR 代码开放特点, 把自 主开发的正向模型嵌入到其仿真平台 , 参与正向模
图 3 ADV ISOR 仿真模型
型的控制策略开发 , 这些工作与实际情况更接近 , 具 有重要的实际应用价值。 ADV ISOR 中的许多部件都有比较成熟的模型, 因此在建立正向仿真软件的过程中 , 可借鉴这些成 熟的模型。在 ADV ISOR 中 , 每个部 件模型都 有正 向和反向两条路线 , 可把原来反向路线删除 , 直接保 留正向路线, 见文献 [ 5]。但是要对文献 [ 5] 中的模 型作进一步 的改进, 以适应在 ADV ISOR 中 对驱动 工况的选择。同时 , 将其中的控制策略模型改为目 前实际课题混合动力汽车测试台架上运行的控制策 略。图 5 为整个模块的顶层示意图 , 其中增加了驾 驶员模块 , 如图 6所示, 它的建模思想如下。 根据循环工况的车速历程及路面坡度信息计算 总的动力 /转矩需求, 并传送到控制策略模块中, 由 控制策略分配各动力源的动力, 最终传送到车轮以 驱动汽车。而实际获得的车 速可能和工况 要求不 同, 因此 车速 P I 控制器 模块中设计了一 P I 控制
该反向建模与仿真不考虑驾驶员的意图以及动 力系统 ( 尤其是离合器和变速器 ) 的动态过程 , 计算 步长较大 (一般为 1s) , 计算速度快 , 可以通过反复 计算以达到系统的最高性能。其主要功能适用于不 同设计方案之间的比较和评价分析, 可用于整车性 能仿真分析与预测, 但并不适合控制算法的设计和 开发。 1 2 正向仿真软件 CRU ISE 的特点 AVL 的 CRU ISE 是正向仿真软件 , 用于研究车 辆动力性、 燃油经济性、 排放性能与制动性能 , 还可 用于车辆开发过程中的传动系匹配和车辆性能预测 等 , 能够对混合动力汽车和电动汽车进行建模仿真 和性能模拟。软件界面友好, 分析结果直观、 易懂, 提 供了与 M atlab 、 C 、 F ortran 等通用编程软件的接口, 为 用户建立自定义模块及控制元件的模型提供了方便。
1 J ilin Un iv ersity, S ta te K ey La boratory of Au tom obile D yna m ica l S imu la tion, Changchun 2 Colleg e of Autom obile Eng ineering, Jilin U niversi ty, Chang chun 130025 ;
图 6 驾驶员模型
器 , 如图 7所示, 主要根据车速差来调节总的动力要 求 , 其中的 P I控制参数可根据不同的车型及工况进 行适当的调节。
这样 , 在 ADV ISOR2002 的 GU I 界面中便 可看 到新 驱 动 链 顶 层 配 置 项 模 型 ( BD _ FOR _PAR _ FAW ) 。另外, 可在 ADV ISOR \ gu i \ gui_ i m age . m文 件中增加所索引的图像文件名, 即可替换成用户所 [ 8- 9] 显示的图像界面 。 通过上述配置即可完成正向 仿真模型嵌入到 ADV ISOR2002 的 GU I 。用 户通过这 个界面可 方便 地配置汽车参数, 并且可以选择不同的工况来进行 正向仿真 , 以考察实际控制策略的合理性。
[ 7]
图 1 后向式车辆仿真流程图
。图 4 是在该仿真平台下建立的某一混合动力
客车的顶层模型。
图 2 前向式车辆仿真流程图
真软件之一是 ADV ISOR, 而正向仿真软件使用较普 遍的是 AVL 的 CRU ISE 软件, 另外美国阿贡国家实 验室 ( argonne national laboratory) 的 PSAT 也是一种 正向式仿 真模型 , 但 国内 应用 较少。文中主 要就 ADV ISOR 和 CRU ISE 软件讨论其各自特点。 1 1 反向仿真软件 ADV ISOR 的特点 仿真模型从满足循环工况要求出发, 计算动力 系统各部件必须提供的转矩、 转速及功率等, 仿真信 息沿整车阻力模型、 车轮模型、 传动系统模型最终到 达动力总成模型。仿真的顶层模型如图 3 所示。
[ 6]
1 正向和反向仿真软件的特点
。
国内应用最为普遍的混合动力汽车性能反向仿
原稿收到日期为 2006 年 7 月 25 日 , 修改稿收到日期为 2006 年 11 月 24 日。
852
汽
车
工
程
2007 年 ( 第 29 卷 ) 第 10 期
该模型除了包括计算整车所需的车体计算模型 ( 如各动力总成 : 发动机、 电机、 电池和变速器等 ), 还包括反映驾驶员操作的模型, 以及提供用户设计 控制策略的应用程序接口 ( AP I) 。对整车控制操作 非常方便 , 而且控制策略与车体模型分工很明确 , 比 较适合实际工程项目对控 制策略开发的延 续性要 求
图 5 正向仿真模型
并保存为 FOR_PAR_defau lts_in . m 的装载文件。另 外, 其他的部 件同样可以根据 用户要求进行修 改。 为了使 ADV ISOR2002能识别此模块, 须向全局变量 V inf的驱动链域中添加如下命令: Option lis t( add , drivetra in , FOR_PAR ) 然后 , 在 b lock _diagram _nam e . m 文 件的 sw itch drivetra in 语句中增加下面语句: C ase FOR_PAR bd_nam e= BD_FOR_PAR _FAW ;
图 7 汽车车速 P I控制器
4 仿真及结果
为了验证所修改的正向仿真模块是否能在 ADV ISOR 2002平台上进行仿 真 , 选 用表 1 所示 的参数 表 1 整车及主要部件参数
整车 参数 动力 传动 系参 数 发动 机参 数 整车质量 /kg 车轮半径 /m 空阻系数 变速器速比 15 000 0 50 0 79 1挡 3挡 5挡 迎风面积 /m 2 滚阻系数 传动系平均效率 13 45 2挡 5 01 4挡 2 84 1 171 ( 2 300 ) 823 ( 1 600 ) 额定转速 / r m in- 1 平均工作效率 电池块 1 300 0 92 25 7 24 0 009 0 85 7 57 3 77
控制策略模块的建模思想是通过不同的动力要 求、 电池 SOC 状态以及车辆车速等状态信息, 控制 发动机在其最佳区域内工作。如果当发动机处于怠 速时, 控制策略会关闭发动机; 如果加速时动力要求 很大, 控制发动机在中等负荷即最佳区域内工作, 而 控制电机参与助力; 如果是滑行或制动, 控制电机发 电用来吸收制动能量。这些控制思想已经在台架试 验中得到了实现 , 并且各种驱动工况也已成功地进 行了调试, 发动机大部分时间都工作在最佳区域内。 其他模块和文献 [ 5] 一样 , 是从 ADV ISOR 模块 中借鉴而来。至此, 把如图 5 所示的顶层模块取名 为 BD_FOR _PAR _FAW. m d,l 保存在 ADV ISOR2002 m ode l目录下。