机器视觉检测的分析简答作业及答案要点
完整版机器视觉思考题及其答案

什么是机器视觉技术?试论述其基本概念和目的。
答:机器视觉技术是是一门涉及人工智能、神经生物学、心理物理学、计算机科学、图像处理、模式识别等诸多领域的交叉学科。
机器视觉主要用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。
机器视觉技术最大的特点是速度快、信息量大、功能多。
机器视觉是用机器代替人眼来完成观测和判断,常用于大批量生产过程汇总的产品质量检测,不适合人的危险环境和人眼视觉难以满足的场合。
机器视觉可以大大提高检测精度和速度,从而提高生产效率,并且可以避免人眼视觉检测所带来的偏差和误差。
机器视觉系统一般由哪几部分组成?试详细论述之。
答:机器视觉系统主要包括三大部分:图像获取、图像处理和识别、输出显示或控制。
图像获取:是将被检测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据。
该部分主要包括,照明系统、图像聚焦光学系统、图像敏感元件(主要是CCD和CMOS采集物体影像。
图像处理和识别:视觉信息的处理主要包括滤波去噪、图像增强、平滑、边缘锐化、分割、图像识别与理解等内容。
经过图像处理后,图像的质量得到提高,既改善了图像的视觉效果又便于计算机对图像进行分析、处理和识别。
输出显示或控制:主要是将分析结果输出到显示器或控制机构等输出设备。
试论述机器视觉技术的现状和发展前景。
答:。
机器视觉技术的现状:机器视觉是近20〜30年出现的新技术,由于其固有的柔性好、非接触、快速等特点,在各个领域得到很广泛的应用,如航空航天、工业、军事、民用等等领域。
发展前景:随着光学传感器、信息技术、信号处理、人工智能、模式识别研究的不断深入和计算机性价比的不断提高,机器视觉技术越来越成熟,特别是市面上已经有针对机器视觉系统开发的企业提供配套的软硬件服务,相信越来越多的客户会选择机器视觉系统代替人力进行工作,既便于管理又节省了成本。
价格持续下降、功能逐渐增多、成品小型化、集成产品增多。
机器视觉检测的分析简答作业及答案要点.doc
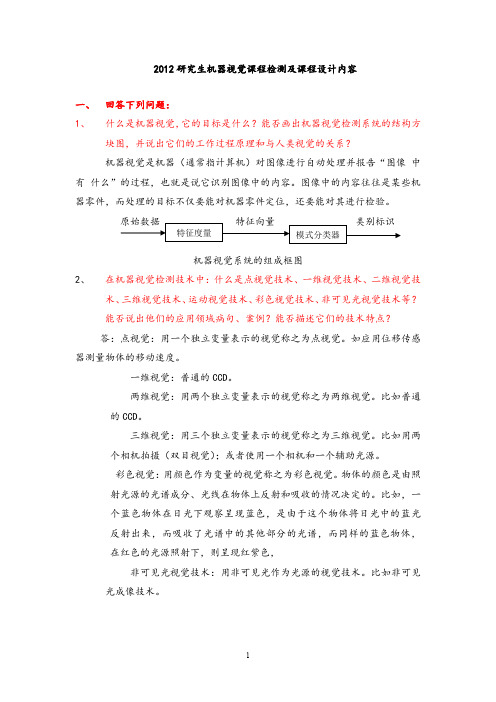
2012研究生机器视觉课程检测及课程设计内容一、回答下列问题:1、什么是机器视觉,它的目标是什么?能否画出机器视觉检测系统的结构方块图,并说出它们的工作过程原理和与人类视觉的关系?机器视觉是机器(通常指计算机)对图像进行自动处理并报告“图像中有什么”的过程,也就是说它识别图像中的内容。
图像中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。
原始数据特征向量类别标识特征度量模式分类器机器视觉系统的组成框图2、在机器视觉检测技术中:什么是点视觉技术、一维视觉技术、二维视觉技术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等?能否说出他们的应用领域病句、案例?能否描述它们的技术特点?答:点视觉:用一个独立变量表示的视觉称之为点视觉。
如应用位移传感器测量物体的移动速度。
一维视觉:普通的CCD。
两维视觉:用两个独立变量表示的视觉称之为两维视觉。
比如普通的CCD。
三维视觉:用三个独立变量表示的视觉称之为三维视觉。
比如用两个相机拍摄(双目视觉);或者使用一个相机和一个辅助光源。
彩色视觉:用颜色作为变量的视觉称之为彩色视觉。
物体的颜色是由照射光源的光谱成分、光线在物体上反射和吸收的情况决定的。
比如,一个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光反射出来,而吸收了光谱中的其他部分的光谱,而同样的蓝色物体,在红色的光源照射下,则呈现红紫色,非可见光视觉技术:用非可见光作为光源的视觉技术。
比如非可见光成像技术。
3、机器视觉检测技术中:光源的种类有哪些?不同光源的特点是什么?光照方式有几种?不同光照方式的用途是什么?又和技术特点和要求?机器视觉检测技术中光源有以下几种:荧光灯,卤素灯+光纤导管,LED 光源,激光,紫外光等。
几种光源的特点如下:成本亮度稳定度使用寿命复杂设计温度影响种类名称荧光灯低差差一般低一般卤素灯+光纤导管高好一般差一般差LED光源一般一般好好高低光照方式有以下几种:背景光法(背光照射)是将被测物置于相机和光源之间。
机器视觉期末考试题及答案

机器视觉期末考试题及答案一、选择题(每题2分,共20分)1. 机器视觉中,图像采集卡的作用是什么?A. 存储图像数据B. 转换模拟信号为数字信号C. 处理图像数据D. 显示图像数据2. 在机器视觉系统中,边缘检测算法主要用于:A. 图像分割B. 图像增强C. 图像压缩D. 图像去噪3. 以下哪项不是机器视觉系统的基本组成部分?A. 光源B. 相机C. 镜头D. 打印机4. 机器视觉中的图像处理通常包括哪些步骤?A. 图像采集、图像预处理、特征提取、图像分析B. 图像采集、图像编码、图像解码、图像分析C. 图像采集、图像压缩、图像解压、图像分析D. 图像采集、图像存储、图像传输、图像分析5. 在机器视觉中,颜色空间转换的目的是什么?A. 改变图像大小B. 改变图像格式C. 改善图像质量D. 便于图像分析和处理6. 以下哪种算法不是用于图像分割的?A. 阈值分割B. 边缘检测C. 区域生长D. 直方图均衡化7. 机器视觉中,用于测量物体尺寸的方法是:A. 模板匹配B. 特征匹配C. 尺寸测量D. 形状识别8. 机器视觉系统中,相机的分辨率对图像质量的影响是:A. 分辨率越高,图像质量越差B. 分辨率越高,图像质量越好C. 分辨率与图像质量无关D. 分辨率越高,图像质量越不稳定9. 在机器视觉中,特征提取的目的是:A. 提高图像的分辨率B. 改善图像的对比度C. 提取图像中的关键信息D. 压缩图像数据10. 机器视觉在工业自动化中的应用包括:A. 质量检测B. 物体识别C. 尺寸测量D. 所有以上选项答案:1. B2. A3. D4. A5. D6. D7. C8. B9. C 10. D二、简答题(每题10分,共30分)1. 简述机器视觉在自动化生产线中的应用及其优势。
2. 解释什么是机器视觉中的图像预处理,并列举几种常见的图像预处理方法。
3. 描述机器视觉系统中相机标定的重要性及其基本步骤。
三、计算题(每题25分,共50分)1. 假设有一个机器视觉系统用于检测产品上的缺陷。
视觉检测笔试题及答案大全
视觉检测笔试题及答案大全一、选择题1. 视觉检测技术主要应用于哪些领域?A. 医学成像B. 工业自动化C. 交通监控D. 所有以上选项答案:D2. 视觉检测系统的核心部件是什么?A. 光源B. 摄像头C. 图像处理软件D. 显示器答案:B3. 在视觉检测中,边缘检测算法的作用是什么?A. 提高图像分辨率B. 确定物体的位置和形状C. 增强图像的对比度D. 减少图像噪声答案:B4. 视觉检测系统中,哪种类型的相机适用于高速运动物体的检测?A. 黑白相机B. 彩色相机C. 高速相机D. 3D相机答案:C5. 在视觉检测中,为什么需要使用滤波器?A. 为了增加图像的亮度B. 为了减少图像的噪声C. 为了改变图像的颜色D. 为了增加图像的对比度答案:B二、判断题6. 视觉检测技术可以完全替代人工检测。
()答案:错误7. 视觉检测系统不需要光源就能正常工作。
()答案:错误8. 图像处理算法可以自动识别图像中的所有物体。
()答案:错误9. 视觉检测系统对环境光线的变化非常敏感。
()答案:正确10. 视觉检测技术在质量控制领域有着广泛的应用。
()答案:正确三、简答题11. 简述视觉检测技术在制造业中的应用。
答案:视觉检测技术在制造业中主要应用于产品质量检测、尺寸测量、缺陷识别、产品分类、机器人引导等。
通过自动化的视觉检测系统,可以提高生产效率,降低人工成本,同时提高检测的准确性和一致性。
12. 描述视觉检测系统中图像采集的一般流程。
答案:图像采集的一般流程包括:选择合适的光源、安装摄像头、设置摄像头参数(如焦距、曝光时间等)、捕获图像、将图像数据传输到图像处理系统进行分析。
四、计算题13. 假设一个视觉检测系统使用了一个分辨率为1920x1080像素的摄像头,计算该系统在一次图像采集中能够获取的像素总数。
答案:1920像素(水平分辨率)乘以1080像素(垂直分辨率)等于2073600像素。
五、案例分析题14. 某工厂使用视觉检测系统对生产线上的瓶子进行缺陷检测。
机器人视觉算法参考答案

机器人视觉算法参考答案1.什么是机器视觉【概述】机器视觉就是用机器代替人眼来做测量和判断。
机器视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和 CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
机器视觉系统的特点是提高生产的柔性和自动化程度。
在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。
正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。
【基本构造】一个典型的工业机器视觉系统包括:光源、镜头、 CCD 照相机、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯/ 输入输出单元等。
系统可再分为:主端电脑(Host Computer)影像撷取卡(Frame Grabber)与影像处理器影像摄影机 CCTV镜头显微镜头照明设备: Halogen光源 LED光源高周波萤光灯源闪光灯源其他特殊光源影像显示器LCD机构及控制系统PLC、PC-Base控制器精密桌台伺服运动机台【工作原理】机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/ 不合格、有/ 无等,实现自动识别功能。
(完整版)机器视觉思考题及其答案

什么是机器视觉技术?试论述其基本概念和目的。
答:机器视觉技术是是一门涉及人工智能、神经生物学、心理物理学、计算机科学、图像处理、模式识别等诸多领域的交叉学科。
机器视觉主要用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。
机器视觉技术最大的特点是速度快、信息量大、功能多。
机器视觉是用机器代替人眼来完成观测和判断,常用于大批量生产过程汇总的产品质量检测,不适合人的危险环境和人眼视觉难以满足的场合。
机器视觉可以大大提高检测精度和速度,从而提高生产效率,并且可以避免人眼视觉检测所带来的偏差和误差。
机器视觉系统一般由哪几部分组成?试详细论述之。
答:机器视觉系统主要包括三大部分:图像获取、图像处理和识别、输出显示或控制。
图像获取:是将被检测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据。
该部分主要包括,照明系统、图像聚焦光学系统、图像敏感元件(主要是CCD和CMOS)采集物体影像。
图像处理和识别:视觉信息的处理主要包括滤波去噪、图像增强、平滑、边缘锐化、分割、图像识别与理解等内容。
经过图像处理后,图像的质量得到提高,既改善了图像的视觉效果又便于计算机对图像进行分析、处理和识别。
输出显示或控制:主要是将分析结果输出到显示器或控制机构等输出设备。
试论述机器视觉技术的现状和发展前景。
答:。
机器视觉技术的现状:机器视觉是近20~30年出现的新技术,由于其固有的柔性好、非接触、快速等特点,在各个领域得到很广泛的应用,如航空航天、工业、军事、民用等等领域。
发展前景:随着光学传感器、信息技术、信号处理、人工智能、模式识别研究的不断深入和计算机性价比的不断提高,机器视觉技术越来越成熟,特别是市面上已经有针对机器视觉系统开发的企业提供配套的软硬件服务,相信越来越多的客户会选择机器视觉系统代替人力进行工作,既便于管理又节省了成本。
价格持续下降、功能逐渐增多、成品小型化、集成产品增多。
机器视觉检测的简答作业及答案要点
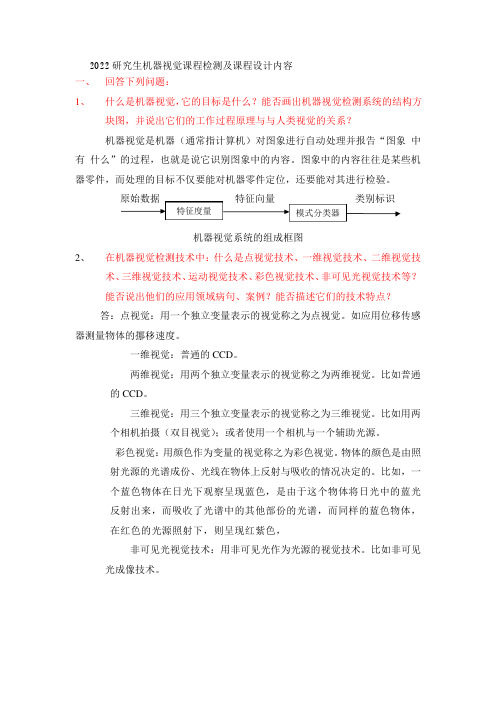
2022研究生机器视觉课程检测及课程设计内容一、 回答下列问题:1、什么是机器视觉,它的目标是什么?能否画出机器视觉检测系统的结构方块图,并说出它们的工作过程原理与与人类视觉的关系?机器视觉是机器(通常指计算机)对图象进行自动处理并报告“图象中有什么”的过程,也就是说它识别图象中的内容。
图象中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。
原始数据特征向量类别标识特征度量模式分类器机器视觉系统的组成框图2、在机器视觉检测技术中:什么是点视觉技术、一维视觉技术、二维视觉技术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等?能否说出他们的应用领域病句、案例?能否描述它们的技术特点?答:点视觉:用一个独立变量表示的视觉称之为点视觉。
如应用位移传感器测量物体的挪移速度。
一维视觉:普通的CCD。
两维视觉:用两个独立变量表示的视觉称之为两维视觉。
比如普通的CCD。
三维视觉:用三个独立变量表示的视觉称之为三维视觉。
比如用两个相机拍摄(双目视觉);或者使用一个相机与一个辅助光源。
彩色视觉:用颜色作为变量的视觉称之为彩色视觉。
物体的颜色是由照射光源的光谱成份、光线在物体上反射与吸收的情况决定的。
比如,一个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光反射出来,而吸收了光谱中的其他部份的光谱,而同样的蓝色物体,在红色的光源照射下,则呈现红紫色,非可见光视觉技术:用非可见光作为光源的视觉技术。
比如非可见光成像技术。
3、机器视觉检测技术中:光源的种类有哪些?不同光源的特点是什么?光照方式有几种?不同光照方式的用途是什么?又与技术特点与要求?机器视觉检测技术中光源有以下几种:荧光灯,卤素灯+光纤导管,LED 光源,激光,紫外光等。
几种光源的特点如下:成本亮度稳定度使用寿命复杂设计温度影响种类名称荧光灯低差差普通低普通卤素灯+光纤导管高好普通差普通差LED光源普通普通好好高低光照方式有以下几种:背景光法(背光照射)是将被测物置于相机与光源之间。
智能视觉检测技术习题答案
智能视觉检测技术习题答案智能视觉检测技术习题答案智能视觉检测技术是一种基于计算机视觉的技术,通过对图像或视频的处理和分析,实现对目标物体的检测、识别和跟踪。
这项技术在人工智能领域具有广泛的应用前景,涉及到计算机视觉、图像处理、模式识别等多个领域的知识。
下面将介绍一些智能视觉检测技术的习题答案。
1. 什么是智能视觉检测技术?智能视觉检测技术是一种通过计算机视觉技术实现对图像或视频中目标物体的检测、识别和跟踪的技术。
它利用计算机对图像进行处理和分析,提取图像中的特征信息,通过模式识别算法实现对目标物体的自动识别和跟踪。
2. 智能视觉检测技术的应用领域有哪些?智能视觉检测技术在很多领域都有广泛的应用,例如智能安防监控、无人驾驶、工业自动化、医疗影像分析等。
在智能安防监控领域,智能视觉检测技术可以实现对异常行为的检测和识别,提高安全性和防范能力。
在无人驾驶领域,智能视觉检测技术可以实现对交通标志、行人、车辆等的检测和识别,提高自动驾驶的安全性和可靠性。
在工业自动化领域,智能视觉检测技术可以实现对产品质量的检测和评估,提高生产效率和产品质量。
在医疗影像分析领域,智能视觉检测技术可以实现对医学影像的自动分析和诊断,辅助医生进行疾病诊断和治疗。
3. 智能视觉检测技术的基本原理是什么?智能视觉检测技术的基本原理是通过对图像或视频的处理和分析,提取图像中的特征信息,然后通过模式识别算法实现对目标物体的自动识别和跟踪。
具体来说,智能视觉检测技术主要包括图像采集、图像预处理、特征提取和模式识别等步骤。
首先,通过摄像机或其他图像采集设备获取图像或视频。
然后,对采集到的图像进行预处理,包括去噪、增强、边缘检测等操作,以提高后续处理的效果。
接下来,通过特征提取算法对图像进行处理,提取图像中的特征信息,例如颜色、纹理、形状等。
最后,通过模式识别算法对提取到的特征进行分析和识别,实现对目标物体的自动识别和跟踪。
4. 智能视觉检测技术的挑战和发展趋势是什么?智能视觉检测技术面临着一些挑战,例如图像质量不佳、复杂背景干扰、目标物体形状和姿态变化等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012研究生机器视觉课程检测及课程设计内容一、回答下列问题:1、什么是机器视觉,它的目标是什么?能否画出机器视觉检测系统的结构方块图,并说出它们的工作过程原理和与人类视觉的关系?机器视觉是机器(通常指计算机)对图像进行自动处理并报告“图像中有什么”的过程,也就是说它识别图像中的内容。
图像中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。
机器视觉系统的组成框图2、在机器视觉检测技术中:什么是点视觉技术、一维视觉技术、二维视觉技术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等?能否说出他们的应用领域病句、案例?能否描述它们的技术特点?答:点视觉:用一个独立变量表示的视觉称之为点视觉。
如应用位移传感器测量物体的移动速度。
一维视觉:普通的CCD。
两维视觉:用两个独立变量表示的视觉称之为两维视觉。
比如普通的CCD。
三维视觉:用三个独立变量表示的视觉称之为三维视觉。
比如用两个相机拍摄(双目视觉);或者使用一个相机和一个辅助光源。
彩色视觉:用颜色作为变量的视觉称之为彩色视觉。
物体的颜色是由照射光源的光谱成分、光线在物体上反射和吸收的情况决定的。
比如,一个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光反射出来,而吸收了光谱中的其他部分的光谱,而同样的蓝色物体,在红色的光源照射下,则呈现红紫色,非可见光视觉技术:用非可见光作为光源的视觉技术。
比如非可见光成像技术。
3、机器视觉检测技术中:光源的种类有哪些?不同光源的特点是什么?光照方式有几种?不同光照方式的用途是什么?又和技术特点和要求?机器视觉检测技术中光源有以下几种:荧光灯,卤素灯+光纤导管,LED 光源,激光,紫外光等。
几种光源的特点如下:光照方式有以下几种:背景光法(背光照射)是将被测物置于相机和光源之间。
这种照明方式的优点是可将被测物的边缘轮廓清晰地勾勒出来。
由于在图像中,被测物所遮挡的部分为黑色,而未遮挡的部分为白色,因此形成“黑白分明”的易于系统分析的图像。
此方法被应用于90%的测量系统中。
前景光法(正面照射)是将灯源置于被测物和相机之前。
又可分为明场照射和暗场照射。
明场照射是为了获得物体的几乎全部信息,照射物体的光在视野范围之内几乎全部反射回去;暗场照射是为了获取物体表面的凹凸,照射物体的光在视野范围之外有部分光反射回去。
同轴光法是将灯源置于被测物和相机之间。
4、机器视觉检测系统中,光学系统的作用是什么?光学器件有哪几种,它们各自的作用是什么?光学镜头有几种类型,它们各自有何用途?光学镜头有哪些技术参数,各自对测量有什么影响?答:机器视觉检测系统中,光学系统用来采集物体的轮廓、色彩等信息。
光学器件主要有:镜头、成像器件(CCD和CMOS)、光圈、快门等。
镜头的作用是对成像光线进行调焦等处理,使成像更清晰;成像器件的作用是将光学图像转换成模拟电信号;光圈的作用如同人得瞳孔,控制入射光的入射量,实现曝光平衡;快门的作用是将想要获取的光学图像照射在成像器件上,获取想要的光学图像,排除干涉等。
光学镜头的类型:标准镜头、广角镜头、远摄镜头、鱼眼镜头、反射式镜头、变焦镜头和特殊镜头等。
标准镜头的作用是获取和人眼观看效果类同的图像;广角镜头的作用是近距离拍摄较大场景的图像;远摄镜头的作用是远距离摄取景物的较大影象,对拍摄不易接近的物体,如动物、风光、人的自然神态,均能在远处不被干扰的情况下拍摄;鱼眼镜头的作用是近距离拍摄更大场景的图像;反射式镜头的作用是更远距离摄取物体图像;变焦镜头的作用是在不改变拍摄距离的情况下,能够在较大幅度内调节底片的成像比例。
光学镜头的技术参数有分辨率,失真,透光,暗角盲区。
5、光电转换器件CCD和CMOS的作用是什么?各自的工作原理是什么,它们的差别是什么?它们有哪些主要的技术参数,其作用是什么?光电转换器件CCD和CMOS的作用是作为半导体光敏元件把光信号转换为电信号。
CCD(Charge—Coupled Demce)电路耦合器件的工作原理:CCD电路耦合器分三个阶段采集图像信号,首先将光信号转换为电信号,然后暂时存放在CMOS存储器中,最后用时钟脉冲顺序读出信号。
CMOS(Complement Metal Oxide Semiconuctor)是互补金属氧化物场效应的简称,其工作原理为:CMOS传感器中每一个感光元件都直接整合了放大器和模数转换逻辑,当感光二极管接受光照、产生模拟的电信号之后,电信号首先被该感光元件中的放大器放大,然后直接转换成对应的数字信号。
换句话说,在CMOS传感器中,每一个感光元件都可产生最终的数字输出,所得数字信号合并之后被直接送交DSP芯片处理。
从技术角度来讲二者的主要区别如下:(a)信息读取方式不同;(b)速度有所差别;(c)电源及耗电量;(d)成像质量CCD和CMOS主要参数:CCD或CMOS尺寸、CCD或CMOS像素、水平分辨率、最小照度,也称为灵敏度、扫描制式、摄像机电源、信噪比、视频输出接口、镜头安装方式。
6、机器视觉检测技术中,图像处理的中心任务是什么?什么是图像预处理,能否说出几种与处理的方法和算法?边缘检测和边缘提取有何区别?图像分割有几种方法?如何理解图像处理中的卷积?能否描述空间域处理和变换域处理的方法和用途?机器视觉检测技术中,图像处理的中心任务是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配和识别的可靠性。
图像预处理即在图像分析中,对输入图像进行特征抽取、分割和匹配前所进行的处理。
是将每一个文字图像分检出来交给识别模块识别的这一过程。
边缘检测使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。
边缘提取是要保留图像弧度变化比较剧烈的区域,从数学上最直观的方法就是微分(对于数字图像来说就是差分),在信号处理的角度来看,也可以说是高通滤波器,即保留高频信号。
图象分割有三种不同的方法,其一是将各象素划归到相应物体或区域的象素聚类方法即区域法,其二是通过直接确定区域间的边界来实现分割的边界方法,其三是首先检测边缘象素再将边缘象素连接起来构成边界形成分割。
图像分割主要包括4种技术:并行边界分割技术、串行边界分割技术、并行区域分割技术和串行区域分割技术。
图像处理中的卷积就是定义图像是f(x),模板是g(x),然后将模版g(x)在图像中移动,每到一个位置,就把f(x)与g(x)的定义域相交的元素进行乘积并且求和,得出新的图像一点(通常是灰度值),把新得到的像素集合起来就是卷积后的图像。
空间域是指图像本身,空间域图像处理的方法是直接对图像的像素进行处理,主要是亮度(灰度级)变换和空间滤波两种方法。
7、机器视觉算法中,你能说出几种与检测有关的方法,能否实践一种算法用于机器视觉检测(如:各阶矩的应用等)?有Canny边缘检测方法,差分边缘检测法,roberts边缘检测法,prewitt 边缘检测法,laplace边缘检测法,log边缘检测法等算法。
下面实现一种基于c++软件语言的程序算法:HDIB SUSANEdgeDetectDIB(HDIB hDib){SetCursor(LoadCursor(NULL, IDC_WAIT));DWORD dwDataLength = GlobalSize(hDib);HDIB hNewDib = GlobalAlloc(GHND,dwDataLength);if(!hNewDib){SetCursor(LoadCursor(NULL, IDC_ARROW));return NULL;}LPBYTE lpDIB = (LPBYTE)GlobalLock(hNewDib);if(lpDIB == NULL){SetCursor(LoadCursor(NULL, IDC_ARROW));return NULL;}LPBYTE lpDIBSrc = (LPBYTE)GlobalLock(hDib);memcpy(lpDIB, lpDIBSrc,sizeof(BITMAPINFOHEADER)+PaletteSize(lpDIBSrc));DWORD lSrcWidth = DIBWidth(lpDIBSrc);DWORD lSrcHeight = DIBHeight(lpDIBSrc);WORD wBitCount =((LPBITMAPINFOHEADER)lpDIBSrc)->biBitCount; DWORD lSrcRowBytes =WIDTHBYTES(lSrcWidth*((DWORD)wBitCount)); LPBYTE lpOldBits = FindDIBBits(lpDIBSrc);LPBYTE lpData = FindDIBBits(lpDIB);//图像变换开始////////////////////////////////////////// DWORD i, j, h, k, offset;int NearPoint[37];int OffSetX[37] = { -1, 0, 1,-2,-1, 0, 1, 2,-3,-2,-1, 0, 1, 2, 3,-3,-2,-1, 0, 1, 2, 3,-3,-2,-1, 0, 1, 2, 3,-2,-1, 0, 1, 2,-1, 0, 1 };int OffSetY[37] = { -3,-3,-3,-2,-2,-2,-2,-2,-1,-1,-1,-1,-1,-1,-1,0, 0, 0, 0, 0, 0, 0,1, 1, 1, 1, 1, 1, 1,2, 2, 2, 2, 2,3, 3, 3 };if(wBitCount == 8){int thre, same, max, min;//统计象素亮度最大值和最小值max = min = 0;for(i=0;i<lSrcHeight;i++)for(j=0;j<lSrcWidth;j++){offset = lSrcRowBytes*i+j;if(max < (int)(*(lpOldBits+offset))) max = (int)(*(lpOldBits+offset));if(min > (int)(*(lpOldBits+offset))) min = (int)(*(lpOldBits+offset));}//相似度阈值为最大值和最小值差的1/10thre = (max-min)/10;for(i=3;i<lSrcHeight-3;i++)for(j=3;j<lSrcWidth-3;j++){//统计圆形邻域内相似的点的个数same = 0;for(h=0;h<37;h++)NearPoint[h] =(int)(*(lpOldBits+lSrcRowBytes*(i+OffSetY[h])+(j+OffSetX[h]))); for(h=0;h<37;h++)if(((int)abs(NearPoint[h]-NearPoint[18])) <= thre) same++;if(same > 27)*(lpData+lSrcRowBytes*i+j) = 255;else *(lpData+lSrcRowBytes*i+j) = 0;}}if(wBitCount == 24){int theSame[3], theMax[3], theMin[3], theThre[3];memset(theMax, 0, sizeof(int)*3);memset(theMin, 0, sizeof(int)*3);for(i=0;i<lSrcHeight;i++)for(j=0;j<lSrcWidth;j++){offset = lSrcRowBytes*i+j*3;for(k=0;k<3;k++){if(theMax[k] < (int)(*(lpOldBits+offset+k)))theMax[k] = (int)(*(lpOldBits+offset+k));if(theMin[k] > (int)(*(lpOldBits+offset+k)))theMin[k] = (int)(*(lpOldBits+offset+k));}}for(k=0;k<3;k++)theThre[k] = (theMax[k]-theMin[k])/10;for(i=3;i<lSrcHeight-3;i++)for(j=3;j<lSrcWidth-3;j++){memset(theSame, 0, sizeof(int)*3);for(k=0;k<3;k++){for(h=0;h<37;h++)NearPoint[h] =(int)(*(lpOldBits+lSrcRowBytes*(i+OffSetY[h])+(j+OffSetX[h])*3+k)); for(h=0;h<37;h++)if(((int)abs(NearPoint[h]-NearPoint[18])) <= theThre[k])theSame[k] ++;}if((theSame[0] > 27) && (theSame[1] > 27) &&(theSame[2] > 27))memset(lpData+lSrcRowBytes*i+j*3, 255, 3);elsememset(lpData+lSrcRowBytes*i+j*3, 0, 3);}}GlobalUnlock(hDib);GlobalUnlock(hNewDib);SetCursor(LoadCursor(NULL, IDC_ARROW));return hNewDib;8、你编写并运行通过了哪些图像处理的计算机程序程序,能否写出流程图?答:运用matlab编写过读取原始图像,对图像进行灰度处理,对灰度图像进行直方图、均值滤波、中值滤波、图像锐化、表面边缘检测及提取等程序。