陀螺仪知识整理与解析
陀螺仪的物理原理及应用
陀螺仪的物理原理及应用一、物理原理陀螺仪是一种测量和感知角速度的装置,其基本原理是利用物体自转的力学原理来测量角速度和方向。
陀螺仪通常由旋转部件和感应部件组成。
1. 旋转部件陀螺仪的旋转部件一般由陀螺轮组成,陀螺轮由一个或多个质量均匀分布的旋转体组成。
陀螺轮通常高速旋转,其角动量保持不变。
2. 感应部件陀螺仪的感应部件主要是用来感测陀螺轮旋转所产生的力或力矩。
一般情况下,陀螺仪使用光电探测器或电容传感器来测量旋转部件的运动状态。
二、应用领域陀螺仪的应用非常广泛,主要用于以下几个领域:1. 导航和定位陀螺仪可以用于惯性导航系统,通过测量陀螺仪的角速度和方向,来计算物体的运动轨迹和定位信息。
在航空、航海、导弹制导等领域,陀螺仪被广泛应用于提供准确的导航和定位服务。
2. 汽车稳定性控制陀螺仪可以用于汽车稳定性控制系统,通过监测车辆的姿态和转弯角度,来实现车辆的稳定性控制。
陀螺仪可以帮助车辆保持良好的操控性能,提高行驶安全性。
3. 航空航天领域陀螺仪在航空航天领域中起着至关重要的作用。
它可以用于飞行器的姿态控制、空间姿态控制、卫星定位、火箭姿态控制等多个方面,为航天器提供精确的定位和控制能力。
4. 无人机行为控制陀螺仪也可以被应用于无人机行为控制系统中。
通过测量无人机的角速度和方向,陀螺仪可以帮助无人机实现稳定的飞行和精确的操控,提高无人机的性能和使用价值。
三、总结陀螺仪是一种利用物体自转原理来测量角速度和方向的装置。
它通过旋转部件和感应部件相互配合,实现对角速度的测量。
陀螺仪在导航、定位、稳定性控制、航空航天和无人机等领域都有广泛的应用。
随着技术的不断进步,陀螺仪的性能和精度也不断提高,为各个领域提供更精确和可靠的测量和控制能力。
陀螺仪的原理与应用
陀螺仪的原理与应用一、陀螺仪的原理陀螺仪是一种用来测量和维持方向的装置,它基于物体在旋转时的角动量守恒原理。
陀螺仪主要由旋转部分和感知部分组成。
1. 旋转部分旋转部分是陀螺仪的核心组件,它通常由一个旋转的转子或转盘构成。
转子在无外力作用下能够保持自身的转动状态,而不会发生偏转。
这是因为转子的转动产生了角动量,当没有外力作用时,角动量守恒,因此转子会一直保持转动。
2. 感知部分感知部分包括一个或多个传感器,用于检测转子的转动情况。
最常用的传感器是微电子加速计和陀螺传感器。
微电子加速计可以感知转子的加速度变化,而陀螺传感器则可以感知转子的角速度变化。
二、陀螺仪的应用陀螺仪的原理和特性使其在多个领域得到广泛应用。
1. 航空航天在航空航天领域,陀螺仪被广泛用于飞行器的姿态控制和导航系统。
通过测量飞行器的姿态变化,陀螺仪可以提供准确的飞行器姿态信息,从而实现稳定飞行和精确导航。
2. 惯导系统陀螺仪在惯性导航系统中起着关键作用。
惯导系统利用陀螺仪测量飞行器的加速度和角速度,从而计算出飞行器的位置、速度和姿态信息。
这些信息对于飞行器的导航、制导和控制非常重要。
3. 智能手机现代智能手机中通常都搭载有陀螺仪。
陀螺仪可以通过感知手机的旋转和倾斜运动,从而实现屏幕自动旋转和姿态感知功能。
这使得用户可以在使用手机时获得更好的操作体验。
4. 无人车陀螺仪在无人车领域也有着重要的应用。
无人车需要准确测量车辆的姿态和运动信息,以保证安全和稳定的行驶。
陀螺仪可以提供车辆的姿态和角速度信息,从而实现精确的导航和控制。
5. 船舶在航海领域,陀螺仪被广泛用于舰船的导航和航向控制。
由于船舶在海上行驶时容易受到波浪和风力的影响,因此需要准确的航向信息来实现航行的稳定和精确。
三、总结陀螺仪是一种基于角动量守恒原理的装置,通过感知转子的角速度变化,从而提供准确的姿态和运动信息。
陀螺仪在航空航天、惯导系统、智能手机、无人车和航海等领域都有着重要的应用。
陀螺仪基本知识惯性导航

电子信息工程学院
30
将大地水准体用 一个有确定参数的 旋转椭球体来逼近 代替(如椭球面与 真实大地水准面之 间的高度差的偏差 平方和最小),这 种旋转椭球体称为 参考椭球体,简称 参考椭球。
电子信息工程学院
31
国际通用参考椭球体
电子信息工程学院
32
WGS-84坐标系基本参数
(1)椭球长半径 (a) 6378137 2m;
电子信息工程学院
38
5.机体坐标系 OX BY(BMZBobile Frame,Body Frame )
机体坐标系与飞机固连,
用表示OX BYB,Z坐B 标原点 机O纵与轴飞一机致重,心重O与合Z飞,B 机O竖X与B轴飞
一致, O与Y飞B 机横轴一致。Fra bibliotekZB YB
XB
电子信息工程学院
39
6.平台坐标系OX pYpZ(pPlatform frame )
电子信息工程学院
33
二、惯性系统中常用的坐标系
在地球上进行导航,所定义的坐标系要将惯导系统 的测量值与地球的主要方向联系起来。因此涉及到了 各种不同的坐标系,主要有以下几类:
陀螺坐标系 地理坐标系 惯性坐标系 地球坐标系 载体坐标系
电子信息工程学院
34
1.陀螺坐标系oxyz
x轴:与陀螺内环轴一致,固连于内环上; z轴:与陀螺转子轴一致,固连于内环上;但不随转子转动; y轴:与oxy平面平行,大方向与外环一致,但一般不与外环轴一致
2.传感器:输出与被测量参数成一定关系的电信号 。如陀螺航向传感器,角速度传感器。
3.本身作为一个元部件,与其它自动控制元部件 组成各种陀螺装置。如陀螺稳定平台,惯性导 航系统等。
最全的陀螺仪基础知识详解
最全的陀螺仪基础知识详解陀螺仪,又叫角速度传感器,是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,同时,利用其他原理制成的角运动检测装置起同样功能的装置也称陀螺仪。
一、陀螺仪的名字由来陀螺仪名字的来源具有悠久的历史。
据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,因此傅科用希腊字gyro(旋转)和skopein(看)两字合为“gyroscopei”一字来命名该仪器仪表。
最早的陀螺仪的简易制作方式如下:即将一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度。
其中,中间金色的转子即为陀螺,它因为惯性作用是不会受到影响的,周边的三个“钢圈”则会因为设备的改变姿态而跟着改变,通过这样来检测设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
因此一开始,陀螺仪的最主要的作用在于可以测量角速度。
二、陀螺仪的基本组成当前,从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动,更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。
将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。
陀螺仪的基本部件有:陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);附件(是指力矩马达、信号传感器等)。
三、陀螺仪的工作原理陀螺仪侦测的是角速度。
陀螺仪知识整理与解析

陀螺仪知识整理与解析1、陀螺仪基础知识 (2)2、Question and answer (2)3、陀螺仪和加速度计的区别与联系 (3)4、常用芯片介绍 (3)1、陀螺仪基础知识陀螺仪:测量角速度,是角速度传感器。
时间积分后得到相对角度。
陀螺和加速度计是惯性器件,是用来测量相对惯性空间的角速度(或对于积分类型的陀螺来说是角增量)和加速度。
在三维空间中描述一个刚体运动要六轴,三轴加速度,三轴角速度。
测量角速度大部分芯片靠的是测量科特迪奥力,也就是让排水孔的水形成涡旋的力。
角速度跟角速率:速度是矢量、有方向。
而速率是标量,只有大小,帶有平均的意味。
如果采样点很快的話(dt趋于0),速度和速率的数值是一样的。
航模的陀螺仪全是角速度传感器,不管是高端还是低端。
mems陀螺仪积分很多时候造成零偏的主要原因应该是随机游走。
2、Question and answerQ:角速度传感器如果在它的测量轴上匀速转动输出是否为定值?A:是,不过首先要保证你是在匀速转动。
用过几种角速度传感器,发现匀速转动传感器,因为加了高通滤波,传感器输出的电平和静止时的电平一样,只有加速的时候电平才变动。
Q:如果在测量轴的某一位置静态输出为A,那么匀速转过45度后静止,那么此时输出是否为A?A:如果是静止测量,是如此的。
但由于频宽,通常信号有一点点滞后。
Q:用陀螺仪测角度的话,是不是对测出的角速度积分即可?网上看到有些资料说可以用陀螺仪和加速度传感器组合测角度,这种方法具体如何实现?A:理论上如此,但是由于bias、drift、scale和数值积分的误差,积分结果是会漂移的。
假设加速度计测量到重力加速度时,可以对陀螺仪校正角度,得到较为正确的结果。
但是sensor,bias、noise、scale 誤差是免不了的。
所以才將两组数据做“数据融合”,实际操作的方法很多,主流的比如“Kalman滤波”。
Q:为啥四轴要装加速度传感器和角速度传感器呢,位置传感器与角速度传感器有什么区别呢?A:物体在自由空间的运动是两种运动的组合:质心的平移+围绕质心的转动,因此,物体运动有6DOF,6个自由度:3个平移自由度+3个转动自由度。
陀螺知识点总结

陀螺知识点总结一、陀螺的基本知识陀螺是一种在旋转时保持平衡的物体,通常是由一个旋转的部件支持在一个固定的支架上。
陀螺最早起源于古希腊时期,当时人们发现了一种将线围绕在木棍上转动可以产生平衡的现象,于是逐渐演化成了现代陀螺。
陀螺通常由三个基本部分构成:旋转部件、支架和启动器。
旋转部件通常是一个圆形的物体,例如木制、塑料或金属等材质,它的一端通常会有一个锥形的尖顶或是轴心以便于旋转,而支架则是用来支撑陀螺并使其能够旋转的结构,通常是呈锥形的结构。
启动器用来帮助陀螺开始旋转,通常是一个线圈或绳索,人们可以通过拉动启动器使陀螺旋转起来。
二、陀螺的物理原理陀螺的运动受到多种物理原理的影响,最主要的包括角动量守恒定律、角速度、角加速度和摩擦力。
1. 角动量守恒定律:当陀螺旋转时,它的角动量会一直守恒,即不受外部干扰而保持不变。
这就意味着陀螺在旋转的过程中,如果不受到外力的干扰,它会一直保持平衡并旋转下去。
2. 角速度:陀螺旋转的速度称为角速度,它是一个描述物体旋转快慢的物理量。
陀螺的角速度越快,它的稳定性就越高,因为快速旋转的陀螺具有更大的角动量,具有更强的惯性力。
3. 角加速度:陀螺在旋转的过程中,如果受到外力的作用,它会产生角加速度,导致它的旋转速度发生变化。
通常情况下,陀螺的旋转速度越快,对外部力的影响越小,这也是陀螺保持平衡的重要因素之一。
4. 摩擦力:陀螺在支架上旋转的过程中,会受到来自支架和空气的摩擦力的影响。
通常情况下,摩擦力会使陀螺的旋转速度逐渐减慢,从而影响它的平衡。
因此,减小摩擦力对于陀螺的稳定性非常重要。
三、陀螺的应用陀螺在现代生活中有着多种应用,其中最常见的包括陀螺仪、陀螺稳定器和陀螺导航系统。
1. 陀螺仪:陀螺仪是一种利用陀螺的稳定性来测量和记录物体姿态的仪器。
它可以帮助飞机、船只和导弹等物体保持平衡并稳定飞行或航行,是现代导航和航空领域的重要装置。
2. 陀螺稳定器:陀螺稳定器通常用于船舶和飞机等载具上,它可以通过陀螺的稳定特性来帮助这些载具在风浪或气流的影响下保持平衡和稳定。
《陀螺》ppt课件优秀版

《陀螺》ppt课件优秀版目录•陀螺基础知识•陀螺仪结构与工作原理•陀螺仪在航空航天领域应用•陀螺仪在航海领域应用•陀螺仪在陆地交通领域应用•陀螺仪在其他领域应用及前景展望01陀螺基础知识陀螺定义与原理陀螺定义陀螺是一种基于角动量守恒原理工作的装置,具有定轴性和进动性两大基本特性。
陀螺原理当陀螺受到外力作用时,其自转轴将绕某一固定点(支点)作进动,且进动角速度与外力矩成正比,而与陀螺的转动惯量成反比。
陀螺分类及应用领域陀螺分类根据工作原理和结构特点,陀螺可分为机械陀螺、光学陀螺、微机械陀螺和原子陀螺等。
应用领域陀螺在航空、航天、航海、兵器、汽车、生物医学等领域有着广泛的应用,如惯性导航、姿态控制、稳定平台、精密测量等。
陀螺发展历程及现状发展历程从最早的机械陀螺到现代的光学陀螺和原子陀螺,陀螺技术经历了漫长的发展历程,不断向着更高精度、更小体积、更低成本的方向发展。
现状目前,光学陀螺和微机械陀螺已成为主流,其中光纤陀螺和MEMS陀螺具有代表性。
同时,原子陀螺作为新一代高精度陀螺技术,正在逐步走向实用化。
02陀螺仪结构与工作原理高速旋转的对称刚体,是陀螺仪的核心部件。
陀螺转子内、外框架附件系统支撑陀螺转子的结构,实现陀螺仪的空间定向和进动。
包括驱动装置、测量装置等,用于驱动陀螺转子旋转并测量其输出信号。
030201陀螺仪基本结构组成陀螺仪工作的基本原理,即在没有外力矩作用时,陀螺转子的角动量保持不变。
角动量守恒定律当陀螺转子受到外力矩作用时,其角动量方向将发生改变,从而产生进动现象。
进动性由于陀螺转子的质量分布不均匀或制造误差等原因,导致其绕自身对称轴旋转时产生的微小摆动。
章动性陀螺仪工作原理剖析机械陀螺仪光学陀螺仪激光陀螺仪MEMS陀螺仪不同类型陀螺仪特点比较结构简单、成本低廉,但精度和稳定性较差。
利用激光干涉原理工作,具有高精度、高稳定性、快速启动等优点,但成本较高且对环境要求较高。
基于光学原理工作,精度高、稳定性好,但成本较高。
航空陀螺仪
航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
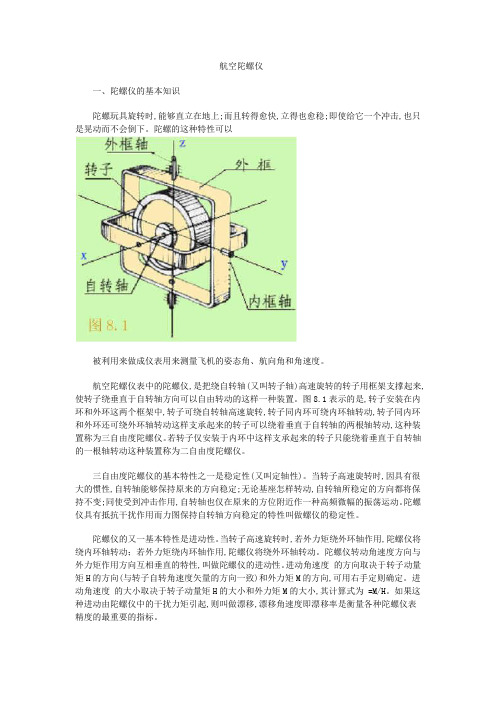
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺仪知识整理与解析
1、陀螺仪基础知识 (2)
2、Question and answer (2)
3、陀螺仪和加速度计的区别与联系 (3)
4、常用芯片介绍 (3)
1、陀螺仪基础知识
陀螺仪:测量角速度,是角速度传感器。
时间积分后得到相对角度。
陀螺和加速度计是惯性器件,是用来测量相对惯性空间的角速度(或对于积分类型的陀螺来说是角增量)和加速度。
在三维空间中描述一个刚体运动要六轴,三轴加速度,三轴角速度。
测量角速度大部分芯片靠的是测量科特迪奥力,也就是让排水孔的水形成涡旋的力。
角速度跟角速率:速度是矢量、有方向。
而速率是标量,只有大小,帶有平均的意味。
如果采样点很快的話(dt趋于0),速度和速率的数值是一样的。
航模的陀螺仪全是角速度传感器,不管是高端还是低端。
mems陀螺仪积分很多时候造成零偏的主要原因应该是随机游走。
2、Question and answer
Q:角速度传感器如果在它的测量轴上匀速转动输出是否为定值?
A:是,不过首先要保证你是在匀速转动。
用过几种角速度传感器,发现匀速转动传感器,因为加了高通滤波,传感器输出的电平和静止时的电平一样,只有加速的时候电平才变动。
Q:如果在测量轴的某一位置静态输出为A,那么匀速转过45度后静止,那么此时输出是否为A?
A:如果是静止测量,是如此的。
但由于频宽,通常信号有一点点滞后。
Q:用陀螺仪测角度的话,是不是对测出的角速度积分即可?网上看到有些资料说可以用陀螺仪和加速度传感器组合测角度,这种方法具体如何实现?
A:理论上如此,但是由于bias、drift、scale和数值积分的误差,积分结果是会漂移的。
假设加速度计测量到重力加速度时,可以对陀螺仪校正角
度,得到较为正确的结果。
但是sensor,bias、noise、scale 誤差是免不了的。
所以才將两组数据做“数据融合”,实际操作的方法很多,主流的比如“Kalman滤波”。
Q:为啥四轴要装加速度传感器和角速度传感器呢,位置传感器与角速度传感器有什么区别呢?
A:物体在自由空间的运动是两种运动的组合:质心的平移+围绕质心的转动,因此,物体运动有6DOF,6个自由度:3个平移自由度+3个转动自由度。
我理解认为,加速度计数据由于短期不可信而长期可信,所以来配合陀螺仪测量转动的,防止只有陀螺仪造成的角度误差及发散,共同测量围绕质心的转动。
我以前也一直认为:对陀螺仪输出的角速度积分,只能算动态偏转角,即便知道初始角,积分误差导致无法算绝对航向角。
其实,一个能够检测出地球自转角速度(0.00416度/秒)高精度陀螺仪,本身就是一个指南针,而且没有累积误差问题。
3、陀螺仪和加速度计的区别与联系
陀螺仪测角速度的,加速度是测线性加速度的。
前者是惯性原理,后者是利用的力平衡原理。
加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。
陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。
因此,需要两者(相互调整,即互补滤波)来确保运行姿态。
现在一般的姿态方面的惯性应用,如IMU(惯性测量单元),由三轴陀螺仪和三轴加速度计组合而成。
4、常用芯片介绍
MPU-6000(6050)的角速度全格感测范围为±250、±500、±1000与±2000°/sec(dps),可准确追踪快速与慢速动作,并且,用户可程式控制的加速器全格感测范围为±2g、±4g±8g 与±16g。
产品传输可透过最高至400kHz的IC或最高达20MHz 的SPI(MPU-6050没有SPI)。
MPU-6000可在不同电压下工作,VDD供电电压介为2.5V±5%、3.0V±5%或3.3V±5%,逻辑接口
VVDIO供电为1.8V±5%(MPU6000仅用VDD)。
MPU-6000的包装尺寸4x4x0.9mm(QFN),在业界是革命性的尺寸。
其他的特征包含内建的温度感测器、包含在运作环境中仅有±1%变动的振荡器。