实验四汉明码系统
汉明码编码实验报告详细解释
汉明码的实现详细实验报告一、实验目的1、掌握线性分组码的编码原理2、掌握汉明码编码方法3、了解编码对误码性能的改善二、实验内容1、自行设置汉明码的参数,生成矩阵,计算所设计出的汉明码;写出产生(3,1)汉明码的生成矩阵,给出生成码的源程序,并给出运行结果。
2、利用encode库函数实现汉明编码;3、搭建一个通信仿真模块,并给出运行结果,分析汉明码对通信性能的影响;4、整理好所有的程序清单或设计模块,并作注释。
三、实验原理(一)、汉明码的介绍汉明码是1951年由汉明(R.W.Hamming)提出的能纠正单个错误的线性分组码。
它性能良好,既具有较高的可靠性,又具有较高的传输效率,而且编译码电路较为简单,易于工程实现,因此汉明码在发现后不久,就得到了广泛的应用。
我们的目的是要寻找一个能纠正单个错误,且信息传输率(即码率r=k/n )最大的线性分组码。
我们已经知道,具有纠正单个错误能力的线性分组码的最小距离应为 3,即要求其H 矩阵中至少任意两列 线性无关。
要做到这一点,只要H 矩阵满足“两无”一一无相同的列, 无全零列就可以了。
(n,k )线性分组码的H 矩阵是一个⑴-"n 訂n 阶矩阵,这里 r =n —k 是校验元的数目。
显然,r 个校验元能组成2r 列互不相同的r 重 矢量,其中非全零矢量有2r -1个。
如果用这2r -1个非全零矢量作为H 矩阵的全部列,即令H 矩阵的列数n =2「一1,则此H 矩阵的各列均不 相同,且无全零列,由此可构造一个纠正单个错误的(n ,k )线性分 组码同时,2r -1是n 所能取的最大值,因为如果n 2r -1,那么H 矩 阵的n 列中必会出现相同的两列,这样就不能满足对 H 矩阵的要求。
而由于n =2 -1是门所能取的最大值,也就意味着码率 R 取得了最大 值,即这样设计出来的码是符合我们的要求的,这样的码就是汉明码 定义 若H 矩阵的列是由非全零且互不相同的所有二进制r 重矢量组成,则由此得到的线性分组码,称为 GF (2)上的(2r -1, 2r -1-r )汉 明码。
实验四汉明码系统
实验四汉明码系统实验四汉明码系统⼀、实验原理和电路说明差错控制编码的基本作法是:在发送端被传输的信息序列上附加⼀些监督码元,这些多余的码元与信息之间以某种确定的规则建⽴校验关系。
接收端按照既定的规则检验信息码元与监督码元之间的关系,⼀旦传输过程中发⽣差错,则信息码元与监督码元之间的校验关系将受到破坏,从⽽可以发现错误,乃⾄纠正错误。
通信原理综合实验系统中的纠错码系统采⽤汉明码(7,4)。
所谓汉明码是能纠正单个错误的线性分组码。
它有以下特点:码长n=2m-1 最⼩码距d=3信息码位k=2n-m-1 纠错能⼒t=1监督码位r=n-k这⾥m位≥2的正整数,给定m后,既可构造出具体的汉明码(n,k)。
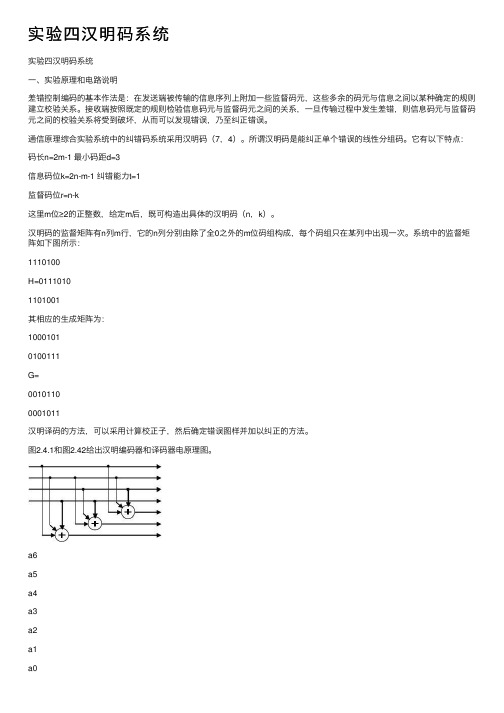
汉明码的监督矩阵有n列m⾏,它的n列分别由除了全0之外的m位码组构成,每个码组只在某列中出现⼀次。
系统中的监督矩阵如下图所⽰:1110100H=01110101101001其相应的⽣成矩阵为:10001010100111G=00101100001011汉明译码的⽅法,可以采⽤计算校正⼦,然后确定错误图样并加以纠正的⽅法。
图2.4.1和图2.42给出汉明编码器和译码器电原理图。
a6a5a4a3a2a1a0aaaa图2.4.1汉明编码器电原理图aaaaaaa3图2.4.2汉明译码器电原理图表2.4.1 (7,4)汉明编码输⼊数据与监督码元⽣成表a6bit,其次是a5、a4……,最后输出a0位。
汉明编译码模块实验电路功能组成框图见图2.4.4和图2.3.5所⽰。
汉明编码模块实验电路⼯作原理描述如下:1、输⼊数据:汉明编码输⼊数据可以来⾃ADPCM1模块的ADPCM码字,或来⾃同步数据端⼝数据、异步端⼝数据、CVSD编码数据、m序列。
选择ADPCM码字由⼯作⽅式选择开关SWC01中的ADPCM状态决定,当处于ADPCM状态时(插⼊跳线器),汉明编码器对ADPCM信号编码;否则处于⾮ADPCM状态时(拔除跳线器),输⼊编码数据来⾃开关KC01所设置的位置,分别为同步数据端⼝数据、异步端⼝数据、CVSD编码数据、m序列。
(7,4)汉明码编译码系统设计

南华大学电气工程学院《通信原理课程设计》任务书设计题目:(7, 4)汉明码编译码系统设计专业:通信工程学生姓名: 马勇学号:起迄日期:2013 年12月20日~2014年1月3日指导教师:宁志刚副教授系主任:王彦教授《通信原理课程设计》任务书3.主要参考文献:[1]樊昌信.通信原理(第6版)[M].北京:电子工业出版社,2012,12.[2]樊昌信,曹丽娜 .通信原理教程(第3版)[M].北京:国防工业出版社,2006,9.[3]刘学勇 .详解MATLAB/Simulink通信系统建模与仿真[M].北京:电子工业出版社,2011,11.[4]张水英 ,徐伟强 .通信原理及MATLAB/Simulink仿真[M].北京:人民邮电出版社,2012,9.[5]赵鸿图,茅艳 .通信原理MATLAB仿真教程[M].北京:人民邮电出版社,2010,11.[6]赵静 ,张瑾 .基于MATLAB的通信系统仿真[M].北京:北京航空航天大学出版社,2010,1.[7]赵谦 .通信系统中MATLAB基础与仿真应用[M].西安:西安电子科技大学出版社,2010,3.[8]徐明远 ,邵玉斌 . MATLAB仿真在现代通信中的应用[M].西安:西安电子科技大学出版社,2011,4.[9]邵玉斌 .Matlab/Simulink通信系统建模与仿真实例分析[M].北京:清华大学出版社,2008, 6.[10]邵佳 ,董辰辉 . MATLAB/Simulink通信系统建模与仿真实例精讲[M].北京:电子工业出版社,2009, 6.[11]黄智伟 .基于NI Multisim的电子电路计算机仿真设计与分析(修订版)[M].北京:电子工业出版社,2011, 6.[12]孙屹 ,戴妍峰 . SystemView通信仿真开发手册[M].北京:国防工业出版社,2004,11.[13]青松,程岱松,武建华 .数字通信系统的SystemView仿真与分析[M].北京:北京航空航天大学出版社,2001,6.4.课程设计工作进度计划:序号起迄日期工作内容2013.12.20~2013.12.24 系统方案设计12013.12.25~2013.12.28 利用Matlab/Systemview/Multisim等软件进行仿真设计22013.12.29~2013.12.31 通信系统的调试和测量,排除故障,分析实验结果32014.1.1 ~2014.1.3 整理设计报告4指导教师宁志刚日期:2013年12 月18日《通信原理课程设计》设计说明书格式一、纸张和页面要求A4纸打印;页边距要求如下:页边距上下各为2.5 厘米,左右边距各为2.5厘米;行间距取固定值(设置值为20磅);字符间距为默认值(缩放100%,间距:标准)。
(7,4)汉明码编译码系统设计.doc

南华大学电气工程学院《通信原理课程设计》任务书设计题目:(7, 4)汉明码编译码系统设计专业:通信工程学生姓名: 马勇学号:20114400236 起迄日期:2013 年12月20日~2014年1月3日指导教师:宁志刚副教授系主任:王彦教授《通信原理课程设计》任务书《通信原理课程设计》设计说明书格式一、纸张和页面要求A4纸打印;页边距要求如下:页边距上下各为2.5 厘米,左右边距各为2.5厘米;行间距取固定值(设置值为20磅);字符间距为默认值(缩放100%,间距:标准)。
二、说明书装订页码顺序(1)任务书 (2)论文正文 (3)参考文献,(4)附录三、课程设计说明书撰写格式见范例引言(黑体四号)☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆(首行缩进两个字,宋体小四号)1☆☆☆☆(黑体四号)正文……(首行缩进两个字,宋体小四号)1.1(空一格)☆☆☆☆☆☆(黑体小四号)正文……(首行缩进两个字,宋体小四号)1.2 ☆☆☆☆☆☆、☆☆☆正文……(首行缩进两个字,宋体小四号)2 ☆☆☆☆☆☆ (黑体四号)正文……(首行缩进两个字,宋体小四号)2.1 ☆☆☆☆、☆☆☆☆☆☆,☆☆☆(黑体小四号)正文……(首行缩进两个字,宋体小四号)2.1.1☆☆☆,☆☆☆☆☆,☆☆☆☆(楷体小四号)正文……(首行缩进两个字,宋体小四号)(1)……图1. 工作波形示意图(图题,居中,宋体五号)…………5结论(黑体四号)☆☆☆☆☆☆(首行缩进两个字,宋体小四号)参考文献(黑体四号、顶格)参考文献要另起一页,一律放在正文后,不得放在各章之后。
只列出作者直接阅读过或在正文中被引用过的文献资料,作者只写到第三位,余者写“等”,英文作者超过3人写“et al”。
几种主要参考文献著录表的格式为:⑴专(译)著:[序号]著者.书名(译者)[M].出版地:出版者,出版年:起~止页码.⑵期刊:[序号]著者.篇名[J].刊名,年,卷号(期号):起~止页码.⑶论文集:[序号]著者.篇名[A]编者.论文集名[C] .出版地:出版者,出版者. 出版年:起~止页码.⑷学位论文:[序号]著者.题名[D] .保存地:保存单位,授予年.⑸专利文献:专利所有者.专利题名[P] .专利国别:专利号,出版日期.⑹标准文献:[序号]标准代号标准顺序号—发布年,标准名称[S] .⑺报纸:责任者.文献题名[N].报纸名,年—月—日(版次).附录(居中,黑体四号)☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆(首行缩进两个字,宋体小四号)(另起一页。
hamming实验报告
hamming实验报告Hamming实验报告引言:Hamming实验是一项重要的计算机科学实验,旨在研究和验证Hamming码的纠错能力。
Hamming码是一种用于纠正单一比特错误的错误检测和纠正编码方式,被广泛应用于数据传输和存储中。
本实验将通过模拟数据传输过程,并使用Hamming码进行纠错,来验证其在实际应用中的有效性。
实验目的:本实验的目的是通过模拟数据传输过程,验证Hamming码的纠错能力。
具体而言,我们将通过引入人为制造的错误,检测和纠正这些错误,以验证Hamming码的可靠性和有效性。
实验步骤:1. 设计Hamming码生成矩阵和校验矩阵。
2. 生成待发送的数据,并使用Hamming码进行编码。
3. 引入人为制造的错误,模拟数据传输过程中的错误。
4. 使用Hamming码进行错误检测和纠正。
5. 比较纠错前后的数据,验证Hamming码的纠错能力。
实验结果:在本次实验中,我们成功设计并实现了Hamming码的纠错过程。
通过引入人为制造的错误,我们模拟了数据传输过程中的错误情况。
使用Hamming码进行错误检测和纠正后,我们成功恢复了原始数据,并验证了Hamming码的纠错能力。
讨论:Hamming码作为一种常用的纠错编码方式,具有较高的纠错能力和可靠性。
通过本次实验,我们进一步验证了Hamming码的有效性。
然而,Hamming码并不能纠正所有错误,它只能纠正单一比特错误。
对于多比特错误或连续错误,Hamming码的纠错能力将受到限制。
因此,在实际应用中,我们需要综合考虑数据传输的可靠性需求,并选择适当的纠错编码方式。
结论:通过本次实验,我们验证了Hamming码的纠错能力。
Hamming码作为一种常用的纠错编码方式,在数据传输和存储中具有重要的应用价值。
然而,我们也需要认识到Hamming码的局限性,它只能纠正单一比特错误。
在实际应用中,我们需要根据具体需求选择适当的纠错编码方式,以确保数据的可靠性和完整性。
海明码的实验报告
海明码的实验报告一、实验目的和背景海明码(Hamming Code)是一种能够检测和纠正单一错误的错误检测和纠正编码方法,它使用了冗余位(Redundancy Bit)来增加数据的可靠性。
本实验的目的是通过编写程序来实现海明码的生成、纠正和检测功能,并验证海明码的可靠性。
二、实验内容与步骤1. 生成海明码:编写程序实现海明码的生成功能,读取输入的原始数据并生成相应的海明码。
2. 引入错误:编写程序在生成的海明码中引入1个错误位。
3. 纠正错误:编写程序实现海明码的错误纠正功能,通过纠正之后的码字与原始数据进行比对,验证纠正效果。
4. 检测错误:编写程序实现海明码的错误检测功能,通过检测错误的海明码数据,输出错误位置。
三、实验过程与结果1. 生成海明码根据海明码的生成规则,我们编写了一个生成海明码的程序。
用户在控制台输入原始数据,程序经过处理后输出相应的海明码。
例如,输入数据为`1101`,生成的海明码为`1101001`。
2. 引入错误在生成的海明码中,我们通过编写程序随机选择一个位置并进行改写,引入1个错误位。
例如,原本生成的海明码为`1101001`,改写后为`1101101`。
3. 纠正错误根据海明码的纠正规则,我们编写了一个纠正错误的程序。
用户输入引入错误后的海明码,程序经过处理后输出经过纠正后的码字。
例如,输入的海明码为`1101101`,经过纠正后输出的码字为`1101001`。
4. 检测错误根据海明码的检测规则,我们编写了一个检测错误的程序。
用户输入海明码,程序经过处理后输出错误位置。
例如,输入的海明码为`1101101`,程序输出错误位置为`5`。
四、实验结果分析通过实验结果可以得出以下结论:1. 海明码的生成功能能够准确地将原始数据转换成相应的海明码。
2. 引入错误后,海明码的纠正功能可以将引入的错误位纠正回原始数据。
3. 海明码的检测功能能够准确地检测出错误位置。
综上所述,海明码具有较高的可靠性,能够有效地检测和纠正单一错误。
Hamming(7,4)编译码器实验报告8.8

8.8 Hamming(7,4)编译码器1.1实验目的·加深理解Hamming(7,4)码的编码方法和抗干扰性能;·通过编程实现Hamming(7,4)码的编码算法,进一步掌握按位二进制加法的实现原理。
1.2 实验原理·输入:长度为4的任意二进制序列。
·输出:输入数据经Hamming(7,4)编码器编码之后,通过8.7节的BSC信道(错误概率为0.1)传输后,再经过Hamming(7,4)译码器译码输出得到信宿端的长度为4的二进制序列。
·源程序格式整齐清晰,注释简单明了。
1.3 实验内容1.3.1 算法描述Hamming(7,4)码的生成矩阵为G=1000101 0100110 0010111 0001011⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦其校验矩阵为H=1110100 0111010 1011001⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦1.3.2 实验程序#include<stdio.h>#define M 7#define N 3int fun(int a,int b){if(a==b)return (0);elsereturn (1);}int main(void){int a[M],i,p[N];printf("请输入四位码 m1,m2,m3,m4:");scanf("%d%d%d%d",&a[0],&a[1],&a[2],&a[3]);p[0]=fun(fun(a[0],a[1]),a[2]);p[1]=fun(fun(a[0],a[2]),a[3]);p[2]=fun(fun(a[1],a[2]),a[3]);printf("%d%d%d%d%d%d%d\n",a[0],a[1],a[2],a[3],p[0],p[1],p[2]);return 0;}1.3.3 运行结果1.3.4 结果分析·运行结果正确。
4位数据位的汉明码成码和纠错
4位数据位的汉明码成码和纠错汉明码是一种常见的错误检测和纠正技术,能够有效地检测和纠正传输过程中的错误。
它是由计算机科学家理查德·汉明在20世纪50年代提出的,并被广泛应用于计算机网络、数据传输和存储系统中。
4位数据位的汉明码是一种较为简单的汉明码。
它由4位数据位和3位纠错位组成,总共7位。
数据位可以是0或1,而纠错位的值是由数据位的值计算得出的。
在计算4位数据位的汉明码之前,我们先来了解一下汉明距离的概念。
汉明距离是指两个等长字符串之间对应位置上不同字符的个数。
例如,字符串"1100"和"1001"之间的汉明距离为2,因为它们的第1位和第4位字符不同。
为了计算4位数据位的汉明码,我们可以使用如下的步骤:1.确定纠错位的位置:根据汉明码的规则,将数据位按照2的幂的位置顺序排列。
对于4位数据位的汉明码,纠错位的位置是第1位、第2位和第4位。
2.计算纠错位的值:根据纠错位的位置,我们可以计算纠错位的值。
对于纠错位1,它的值是由数据位2、数据位3和数据位4的异或结果得出;对于纠错位2,它的值是由数据位1、数据位3和数据位4的异或结果得出;对于纠错位3,它的值是由数据位1、数据位2和数据位4的异或结果得出。
3.编码:将数据位和纠错位按照顺序排列,得到7位汉明码。
例如,假设我们的4位数据位是"1101",则纠错位的值分别为"1"、"1"和"0",最终的7位汉明码是"1101110"。
通过上面的计算和编码过程,我们得到了4位数据位的汉明码。
接下来,我们将讨论如何利用汉明码进行错误检测和纠正。
在传输过程中,如果出现一个位的错误,我们可以通过比较接收到的汉明码和发送时计算的汉明码来检测错误。
如果两个汉明码不相同,说明至少有一个位发生了错误。
在纠错方面,我们可以利用纠错位来判断错误的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四汉明码系统实验原理和电路说明差错控制编码的基本作法是:在发送端被传输的信息序列上附加一些监督码元,这些多码组只在某列中出现一次。
系统中的监督矩阵如下图所示:1110 10 00 1110 10J 1 0 1 0 0 1_其相应的生成矩阵为: 「0 0 0 10 厂0 10 0 111 0 0 10 1107 0 0 1 0 1 —汉明译码的方法,可以采用计算校正子,然后确定错误图样并加以纠正的方法。
图241和图2.42给出汉明编码器和译码器电原理图。
与监督码兀之间的关系, 一旦传输过程中发生差错,则信息码兀与监督码兀之间的校验关系将受到破坏,从而可以发现错误, 乃至纠正错误。
通信原理综合实验系统中的纠错码系统采用汉明码 (7, 4)。
,所谓汉明码是能纠正单个 错误的线性分组码。
它有以下特点:码长 n=2m -1 最小码距 d =3 信息码位 k=2n - m-1纠错能力 t =1监督码位r=n- k这里m 位》2的正整数,给定m 后,既可构造出具体的汉明码(n , k )o余的码元与信息之间以某种确定的规则建立校验关系。
接收端按照既定的规则检验信息码元 汉明码的监督矩阵有 n 列m 行,它的n 列分别由除了全 0之外的m 位码组构成,每个H=G=表 2.4.14位信息位 a 6, a s , a 4, a 33位监督码元 a 2, a 1, a 04位信息位a 6, a s , a 4, a 33位监督码元a 2, a 1, a 00000 000 1000 101 0001 011 1001 110 0010 110 1010 011 0011 101 1011 000 0100 111 1100 010 0101 100 1101 001 0110 001 1110 100 01110101111111表2.4.1为(汉明编码输入数据与监督码元生成表。
编码输出数据最先输出是 a 6bit ,其次是a s 、a 4 ,最后输出 a o 位。
汉明编译码模块实验电路功能组成框图见图 2.4.4和图2.3.5所示。
汉明编码模块实验电路工作原理描述如下:1、输入数据:汉明编码输入数据可以来自 ADPCM1模块的ADPCM 码字,或来自同a 6 a 5 a 4 a 3 a 2 a i a o图2.4.1汉明编码器电原理图a 6 a s a 4a 3a 3 a 3 a 3图2.4.2汉明译码器电原理图步数据端口数据、异步端口数据、CVSD编码数据、m序列。
选择ADPCM码字由工作方式选择开关SWC01中的ADPCM状态决定,当处于ADPCM状态时(插入跳线器),汉明编码器对ADPCM信号编码;否则处于非ADPCM状态时(拔除跳线器),输入编码数据来自开关KC01所设置的位置,分别为同步数据端口数据、异步端口数据、CVSD编码数据、m序列。
2、m序列发生器:m序列用于测试汉明编码规则,输出信号与开关KWC01位置表242 所示:表2.4.2跳线器3、编码使能开关:此开关应与接收端汉明译码器使能开关同步使用,该开关处于使能状态(H_EN短路器插入),汉明码编码器工作;否则汉明码编码器不工作。
需注意: 汉明码编码器不工作时,ADPCM和CVSD话音数据无法通话,这是因为编码速率与信道速率不匹配。
4、错码产生:错码产生专门设计用于测量汉明译码器的纠错和检错性能。
输出错码与开关KWC01位置参见表2.4.3所示:表2.4.3跳线器错码可以用示波器从错码指示端口TPC03监测。
汉明编码模块各测试点定义:1、TPC01 :输入数据2、TPC02:输入时钟3、TPC03 :错码指示(无加错时,该点为低电平。
)4、TPC04:编码模块输出时钟(56KHZ/BPSK/DBPSK)5、TPC05 :编码模块输出数据(56Kbtps/BPSK/DBPSK)汉明译码模块实验电路工作原理描述如下:1、输入信号选择开关:开关KW01、KW02用于选择输入信号和时钟是来自解调器信道或直接来自汉明编码模块。
当KW01、KW02设置在1_2位置(CH :左端),则输入信号来自信道;开关KW01、KW02设置在2_3位置(LOOP :右端),则输入信号来自汉明编码模块。
2、汉明译码器:主要由串/并变换器、校正子生成器、3/8 译码器和纠错电路构成。
该电路专门由一个CPLD ( EPM7128 )实现。
3、汉明译码使能开关:SW03 中H_EN 与发端编码使能开关同步使用。
汉明译码模块各测试点定义:1、TPW01 :输入时钟(56KHz BPSK/DBPSK )2、TPW02 :输入数据(56Kbtps BPSK/DBPSK )3、TPW03 :检测错码指示4、TPW04 :输出时钟5、TPW05: CVSD 数据输出6、TPW06:同步数据输出7、TPW07: m 序列输出8、TPW08 :异步数据输出m数据终端信道终端信道时钟序列TPW05 CVSD 异步数据同步数据1、 JH5001通信原理综合实验系统2、 20MHz 双踪示波器3、 JH9001型误码测试仪(或 GZ9001 型)三、实验目的1、通过纠错编解码实验,加深对纠错编解码理论的理解;三、实验内容准备工作:(1)首先通过菜单将调制方式设置为BPSK 或DBPSK 方式;将汉明编码模块内工作方式选择开关 SWC01中,编码使能开关插入( H_EN ),ADPCM 数据断开(ADPCM );将输入数据选择开关 KC01设置在m 序列(DT_M )位置;设置 m 序列方式为(00 : M_SEL2和M_SEL1拔下),此时m 序列输出为1/0码。
M_SEL2 M_SEL1(2)将汉明译码模块内输入信号和时钟选择开关 KW01、KW02设置在LOOP 位置(右 端),输入信号直接来自汉明编码模块;将译码器使能开关 KW03设置在工作位置 0N (左端)。
1. 编码规则验证(1) 用示波器同时观测编码输入信号TPC01波形和编码输出波形 TPC05,观测时以TPC01同步,观测是否符合汉明编码规则(参见表 2.4.1所示)。
注意此时输入、 输出数据速率不同,输入数据速率为32Kbps ,输出数据速率为 56Kbps 。
(2) 设置m 序列方式为(10: M_SEL2插入、M_SEL1拔下),此时m 序列输出为11/00 码(参见表2.4.2所示)。
用示波器同时观测编码输入信号TPC01波形和编码输出 波形TPC05,观测时以TPC01同步,观测是否符合汉明编码规则。
实验仪器SWC01• • • • • •• • DT SYS[DT_M十• • • •A QPi• •E_MOD0 E_MOD1 H_ENADPCM(3)设置其它m序列方式,重复上述测量步骤。
注:其它两种m序列周期因非4bit的倍数,观测时要仔细调整示波器才能观测。
2. 译码数据输出测量(1)用示波器同时观测汉明编码模块的编码输入信号TPC01 波形和汉明译码模块译码输出m 序列波形TPW07 ,观测时以TPC01 同步。
测量译码输出数据与发端信号是否保持一致。
(2)设置不同的m 序列方式,重复上述实验,验证汉明编译码的正确性。
问题与思考:当m 序列产生输出0/1 码或00/11 码或7 位周期序列时(都是短周期性数据),观测译码接收和发送数据信号一致,此时保持跳线开关和设置不变,插拔H-EN 。
此时有可能发生译码输出数据与编码数据有不一致。
如不一致,可将SWC01 中的ADPCM 开关插入再断开(加入一段随机数据),在加入ADPCM 数据时须将KO01 置于左边,K501 置于右边。
此时译码输出数据与编码数据又一致,这是为什么(参照表2.4.1 进行分析)?在实际通信中如何解决这问题?3. 译码同步过程观测将汉明编码模块工作方式选择开关SWC01 的编码使能开关插入(H_EN );ADPCM 数据有效(ADPCM )。
将汉明译码模块的输入信号和时钟选择开关KW01 、KW02 设置在2_3位置(右端),输入信号直接来自汉明编码模块。
(1)用示波器检测汉明译码模块内错码检测指示输出波形TPW03 。
将汉明编码模块内工作方式选择开关SWC01 的编码使能开关断开(H_EN ),使汉明译码模块失步,观测TPW03 变化;将编码使能开关插入(H_EN ),观测汉明译码的同步过程,记录测量结果。
4. 发端加错信号观测将汉明编码模块工作方式选择开关SWC01 的编码使能开关插入(H_EN );ADPCM 数据有效(ADPCM )。
将汉明译码模块内输入信号和时钟选择开关KW01、KW02设置在LOOP位置(右端),输入信号直接来自汉明编码模块;将译码器使能开关KW03 设置在工作位置0N (左端)。
(1)用示波器同时测量汉明编码模块内加错指示TPC03 和汉明译码模块内错码检测指示输出波形TPW03 的波形,观测时以TPC03 同步。
此时无错码。
(2)将汉明编码模块工作方式选择开关SWC01 的加错开关E_MOD0 接入,产生1 位错码,定性观测明译码能否检测出错码,记录结果。
(3)将汉明编码模块工作方式选择开关SWC01 的加错开关E_MOD1 接入,产生2 位错码,定性观测明译码能否检测出错码,记录结果。
(4)将汉明编码模块工作方式选择开关SWC01 的加错开关E_MOD0 、E_MOD1 都插入,产生更多错码,定性观测明译码能否检测出错码和失步,记录结果。
五、实验报告1、画出输入为0/1 码、00/11 码和1110010m 序列码的汉明编码输出波形。
2、分析整理测试数据。