合工大工图竞赛题
合肥工业大学试卷参考答案(A卷)
又因 N 必须为 2 的整数幂 所以一个记录中的最少点数为 N=210=1024。 二. 简答题(共 40 分,10 分/题) 1. 采用 FFT 算法,可用快速卷积实现线性卷积。现欲计算两个长度分别为 N1 和 N2 的有限 长序列 x(n)、 h(n)的线性卷积 x(n)*h(n), 试写出该快速卷积算法的计算步骤 (注意说明点数) 。 M 1 将序列 x(n)、h(n) 补零至长度 N,其中:N≥N1+N2−1 且 N=2 (M 为整数) 答:○ ; 2 利用 FFT 算法分别计算序列 x(n)、h(n)的 N 点离散傅里叶变换 X(k)、H(k); ○ 3 计算频谱 X(k)、H(k)的乘积,即 ○
Y (k ) = X (k ) H (k )
4 计算 Y(k)的 IFFT 变换,则求得序列 x(n)、h(n)的 N 点线性卷积 x(n)*h(n),即 ○
x(n) ∗ h(n) = y (n) = IFFT [ X (k ) H (k )]
此快速卷积过程如图所示,图中,N≥N1+N2-1,且 N=2M(M 为整数) 。
−π
π
3. 试画出图示的两个有限长序列的六点循环卷积。
第 1 页 共 4 页
解:由循环卷积的定义,可知
6 x ( n) = [ x (( n)) ○ * x ((n )) ]R ( n) y (n) = x1 (n) ○ 2 1 6 2 6 6 * 3δ ((n − 3)) ]R ( n) = [ x1 ((n)) 6 ○ 6 6
第 3 页 共 4 页
∑
n =0
N −1
x (n) =
2
1 N
∑ X (k )
k =0
N −1
2
证:由 DFT 的定义,可知
合肥工业大学第十四届工程制图竞赛获奖名单

性别
专业班级
男
机设18-2班
男
机工19-8班
男
能动19-2班
男
机工19-8班
男
机工19-8班
男 机械工程18-3班
男
机设19-1班
女
成型19-1班
男
机设18-5班
男
成型19-1班
男
机工19-2班
男 车辆创新实验19-1班
男 工业工程19-1班
男
飞行器19-1班
男 车辆工程19-1班
男
交工19-2班
女 机械工程19-8班
冯巧慧 武泽
张聪 曹迎 何欣祥 杨超博
龙诗军
王轶涵 张辰晖 孙谢炜 孙笑楠
习一辰 王俊鑫 杨天鹏
张正阳 陈诺 井源龙 郭家伟 裴昌言 朱文涛 赵昊阳
刘英权
冯国轩 王皓帅 陆毅
吴桐 曾毓彬
刘欣雨 何鸿涛 李柱 沈晓楠
赵雨棠
杨璐华 陈裕滨 张千瑜
丁勤
王韩杰 董英博
庞一坚 黄辰磊
余润秋 马元彪 顾溢文 江志鹏 王硕孜 赵熠 王超凡
能动19-2班
合肥校区
2019214889 男 车辆工程19-3班 合肥校区
2019216927 男
机工19-9班
宣城校区
2019216680 男
机工19-5班
宣城校区
2019212538 男
2019212803 男
成型19-2班
合肥校区
2019213600 男 车辆创新19-1班 合肥校区
2018215126 男
合肥校区
男
材料成19-1班
合肥校区
男
交控19-1班
宣城校区
合工大热工习题

X min EI es 0
+22
+
0
-
-13
100
孔的基本偏差数值的确定
通用规则:
A~H,
EI=-es
(与公差等级无关)
K、M、N
标准公差>IT8 ES=-ei
P至ZC(N例外)标准公差>IT7 (孔、轴公差等级相同)
特殊规则:K、M、N 标准公差≤IT8 孔比轴低一级
P至ZC 标准公差≤IT7
49.978 49.996 49.9765
49.975 49.9945 49.975
TS量 1.5 规
50
50
49.9985
试计算遵守包容要求的φ40M8/h7配合的孔、轴工作量 规及其校对量规的极限尺寸,将计算的结果填入表格中, 并画出公差带示意图。
工件 孔
φ50K8 E
轴
φ50h7 E
量规
通规 止规
Th 30m,Ts 19m, es 0。
试求:ES、EI、ei、Tf 及X min 或Ymax 。并画出公差带示意图。
Ts es ei ei es Ts 19m
Tf Th Ts 49m
ES X max ei 28 19 9m
习题
16、 孔的公称尺寸D=50mm,上极限尺寸Dmax=50.087mm,下极限 尺寸Dmin=50.025mm,求孔的上偏差ES、EI及公差Th,并画出公差 带示意图
解:ES Dmax D 0.087mm Th ES EI 0.062mm
EI Dmin D 0.025mm
45t6
450.070 0.054
合肥工业大学试卷参考答案B卷

=
1 2π
π −π
X
2
(e
jω
)dω
所以
∫ ∫ ∫ 1
2π
π −π
X1 (e
jω
)X 2 (e
jω
)dω
=
{21π
π −π
X1 (e
jω
)dω}{21π
π −π
X
2 (e
jω
)dω}
第4页共4页
x(n) =
x(t) t =nTs
=
x(nTs ) =
x⎜⎜⎝⎛
n fs
⎟⎟⎠⎞
=
3
cos⎜⎜⎝⎛
2π
⎜⎛ ⎝
1 5
⎟⎞n ⎠
⎟⎟⎠⎞
+
5
sin⎜⎜⎝⎛
2π
⎜⎛ ⎝
3 5
⎟⎞n ⎠
⎟⎟⎠⎞
+
10
cos⎜⎜⎝⎛
2π
⎜⎛ ⎝
6 5
⎟⎞n ⎠
⎟⎟⎠⎞
=
3
cos⎜⎜⎝⎛
2π
⎜⎛ ⎝
1 5
⎟⎞n ⎠
⎟⎟⎠⎞
−
2π
⎜⎛ ⎝
1 5
⎟⎞n ⎠
⎟⎟⎠⎞
−
5 sin ⎜⎜⎝⎛
2π
⎜⎛ ⎝
2 5
⎟⎞n ⎠
⎟⎟⎠⎞
2. 设 x(n)的傅里叶变换为 X(ejω),试利用 X(ejω)表示下列序列的傅里叶变换:
(1) x1(n) = x(1 − n) + x(−1 − n) (2) x(n) = 1 [x(n) + x∗ (−n)]
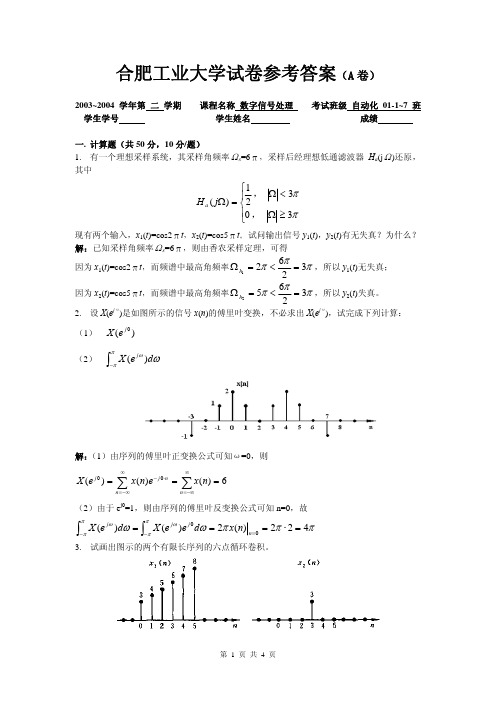
一. 计算题(共 60 分,12 分/题) 1. 设模拟信号 x(t)=3cos2000πt +5sin6000πt +10cos12000πt,求: (1) 该信号的最小采样频率; (2) 若采样频率 fs=5000Hz,其采样后的输出信号; 解:(1)在模拟信号中含有的频率成分是
合工大计组往届真题

合工大计组往届真题
一.名词解释(3*5分)
建筑是指在建筑的全寿命周期内,最大限度地节约资源(节能节地,节水,节材),保护环境和减少污染,为人们提供健康,适用和高效的使用空间,与自然和谐共生的建筑。
2.质感与肌理P50公建第三章公共建筑的造型艺术问题形式美的原理、构图规律
3.空间网架结构P98公建第四章公共建筑的技术经济问题分析空间结构体系与公共建筑
二.默图题(2*5分)
1.东京代代木国立综合体育馆
P381公建第六章公共建筑实例选编著名城市地标性建筑
2.纽约古根海姆美术馆
P63公建第三章公共建筑的造型艺术问题著名城市地标性建筑
三.简答题(1*10分)
1.小区规划中建筑群体平面空间形式有哪几种,结合简图说明住宅第二、三、四章低层、多层、中高层、高层住宅设计
四.论述题(1*10分)
1.如何体验建筑,结合实例加以论述。
合肥工业大学《计算机工程绘图》复习试题及答案
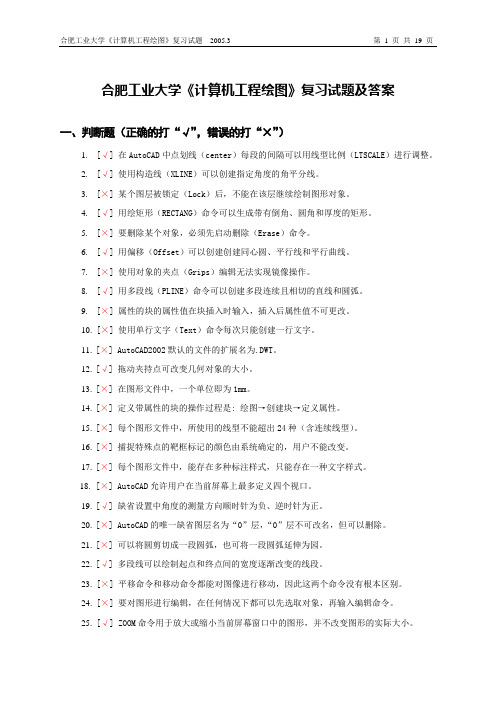
合肥工业大学《计算机工程绘图》复习试题及答案一、判断题(正确的打“√”,错误的打“×”)1.[√] 在AutoCAD中点划线(center)每段的间隔可以用线型比例(LTSCALE)进行调整。
2.[√] 使用构造线(XLINE)可以创建指定角度的角平分线。
3.[×] 某个图层被锁定(Lock)后,不能在该层继续绘制图形对象。
4.[√] 用绘矩形(RECTANG)命令可以生成带有倒角、圆角和厚度的矩形。
5.[×] 要删除某个对象,必须先启动删除(Erase)命令。
6.[√] 用偏移(Offset)可以创建创建同心圆、平行线和平行曲线。
7.[×] 使用对象的夹点(Grips)编辑无法实现镜像操作。
8.[√] 用多段线(PLINE)命令可以创建多段连续且相切的直线和圆弧。
9.[×] 属性的块的属性值在块插入时输入,插入后属性值不可更改。
10.[×] 使用单行文字(Text)命令每次只能创建一行文字。
11.[×] AutoCAD2002默认的文件的扩展名为.DWT。
12.[√] 拖动夹持点可改变几何对象的大小。
13.[×] 在图形文件中,一个单位即为1mm。
14.[×] 定义带属性的块的操作过程是: 绘图→创建块→定义属性。
15.[×] 每个图形文件中,所使用的线型不能超出24种(含连续线型)。
16.[×] 捕捉特殊点的靶框标记的颜色由系统确定的,用户不能改变。
17.[×] 每个图形文件中,能存在多种标注样式,只能存在一种文字样式。
18.[×] AutoCAD允许用户在当前屏幕上最多定义四个视口。
19.[√] 缺省设置中角度的测量方向顺时针为负、逆时针为正。
20.[×] AutoCAD的唯一缺省图层名为“0”层,“0”层不可改名,但可以删除。
21.[×] 可以将圆剪切成一段圆弧,也可将一段圆弧延伸为园。
工业产品CAD竞赛试题—零件齐全的手机模型设计

工业产品CAD竞赛试题—零件齐全的手机模型设计工业产品CAD竞赛题目(比赛时间:90分钟)工位号:一、比赛规则1、本比赛项目为参赛者提供大赛通知中所示的软件环境,不包含第三方插件等辅助软件,也不允许参赛者携带任何软件进入赛场。
2、不允许在完成的作品中以任何形式透露参赛选手的身份信息,否则不计成绩。
3、比赛时间:90分钟。
二、说明与要求1、参赛选手首先在D盘以选手自己的“机位号”命名创建一个文件夹,后面的参赛作品一定要放到该文件夹中,创建的文件名应明确绘制内容,内部件分别以题目命名。
放在指定文件夹外的文件,不计成绩。
2、创建的工程视图用“*.idw”格式提交;根据二位图建立的立体三维模型用“*.ipt” 格式提交;渲染的效果图使用“*.bmp”格式提交。
表达视图即爆炸图用“*.ipn” 格式提交,三维模型用“*.iam”格式提交,动画视频用“*.avi”格式提交。
3、图中尺寸单位均为mm。
4、比赛结束前5分钟,参赛选手应进行作品的检查和存盘。
比赛时间一到,不要关闭计算机,留下全部下发物品后立即离开赛场。
5、注意:参赛作品要及时存盘,以免数据丢失影响比赛成绩。
6、如果参赛作品没有存放在指定的文件夹中得0分。
三、比赛题目和要求题目一、(抄图):IPhone手机根据零件图创建零件模型,并按照图样要求将零件模型进行装配。
1、根据给定的各零件图创建零件三维模型,并按照给定的零件图进行抄绘。
标准零件,可直接从资源库中心调用2、根据给出的工程视图,创建数字模型,并将创建的三维零件模型进行三维装配。
装配约束、约束驱动要符合实际要求,总装配中要清晰的位置表达视图。
3、将摄像头总装配图模型,用表达视图即爆炸图表达出装配过程,表达要合理。
4、将摄像头三维总装配模型渲染成效果图。
5、抄绘图19、图21、图24、图26、图5,图纸幅面和比例自定,要选择标准图纸幅面,按照机械制图国家标准(GB/T4457GB/T4459)制图。
合肥工业大学数学竞赛试题及答案

C++语言:
#include<fstream> #define Maxm 501 using namespace std; ifstream fin; ofstream fout("APSP.out"); int p,q,k,m; int Vertex,Line[Maxm]; int Path[Maxm][Maxm],Dist[Maxm][Maxm]; void Root(int p,int q) { if (Path[p][q]>0) { Root(p,Path[p][q]); Root(Path[p][q],q); } else { Line[k]=q; k++; } } int main() { memset(Path,0,sizeof(Path)); memset(Dist,0,sizeof(Dist)); fin >> Vertex; for(p=1;p<=Vertex;p++) for(q=1;q<=Vertex;q++) fin >> Dist[p][q]; for(k=1;k<=Vertex;k++) for(p=1;p<=Vertex;p++) if (Dist[p][k]>0) for(q=1;q<=Vertex;q++) if (Dist[k][q]>0) { if+Dist[k][q])||(Dist[p][q]==0))&&(p!=q)) { Dist[p][q]=Dist[p][k]+Dist[k][q]; Path[p][q]=k; } } for(p=1;p<=Vertex;p++) { for(q=p+1;q<=Vertex;q++) { fout << "\n==========================\n"; fout << "Source:" << p << '\n' << "Target " << q << '\n'; fout << "Distance:" << Dist[p][q] << '\n'; fout << "Path:" << p; k=2; Root(p,q); for(m=2;m<=k-1;m++) fout << "-->" << Line[m]; fout << '\n'; fout << "==========================\n"; } } fin.close(); fout.close(); return 0; } 注解:无法连通的两个点之间距离为0; Sample Input 7 00 20 50 30 00 00 00 20 00 25 00 00 70 00 50 25 00 40 25 50 00 30 00 40 00 55 00 00 00 00 25 55 00 10 70 00 70 50 00 10 00 50 00 00 00 00 70 50 00 Sample Output ========================== Source:1 Target 2 Distance:20 Path:1-->2 ========================== ========================== Source:1 Target 3 Distance:45 Path:1-->2-->3 ========================== ========================== Source:1 Target 4 Distance:30 Path:1-->4 ========================== ========================== Source:1 Target 5 Distance:70 Path:1-->2-->3-->5 ========================== ========================== Source:1 Target 6 Distance:80 Path:1-->2-->3-->5-->6 ========================== ========================== Source:1 Target 7 Distance:130 Path:1-->2-->3-->5-->6-->7 ========================== ========================== Source:2 Target 3 Distance:25 Path:2-->3 ========================== ========================== Source:2 Target 4 Distance:50 Path:2-->1-->4 ========================== ========================== Source:2 Target 5 Distance:50 Path:2-->3-->5 ========================== ========================== Source:2 Target 6 Distance:60 Path:2-->3-->5-->6 ========================== ========================== Source:2 Target 7 Distance:110 Path:2-->3-->5-->6-->7 ========================== ========================== Source:3 Target 4 Distance:40 Path:3-->4 ========================== ========================== Source:3 Target 5 Distance:25 Path:3-->5 ========================== ========================== Source:3 Target 6 Distance:35 Path:3-->5-->6 ========================== ========================== Source:3 Target 7 Distance:85 Path:3-->5-->6-->7 ========================== ========================== Source:4 Target 5 Distance:55 Path:4-->5 ========================== ========================== Source:4 Target 6 Distance:65 Path:4-->5-->6 ========================== ========================== Source:4 Target 7 Distance:115 Path:4-->5-->6-->7 ========================== ========================== Source:5 Target 6 Distance:10 Path:5-->6 ========================== ========================== Source:5 Target 7 Distance:60 Path:5-->6-->7 ========================== ========================== Source:6 Target 7 Distance:50 Path:6-->7 ==========================