processing串口通讯
processing串口通讯
练习:
基础:做一个文字型的电子钟; 进阶:做一个文字加现状的电子钟。
定义变量
连接指定串口
关键语句分析
判断串口是否有数据
myPort.available() > 0 val = myPort.read(); myPort.write('H');
获取串口数据
ቤተ መጻሕፍቲ ባይዱ
输出串口数据
范例1:
import processing.serial.*; Serial myPort; // Create object from Serial class int val; // Data received from the serial port void setup() { size(200, 200); String portName = Serial.list()[0]; myPort = new Serial(this, portName, 9600); } void draw() { if ( myPort.available() > 0) { // If data is available, val = myPort.read(); // read it and store it in val } background(255); // Set background to white if (val == 0) { // If the serial value is 0, fill(0); // set fill to black } else { // If the serial value is not 0, fill(204); // set fill to light gray } rect(50, 50, 100, 100); }
串口通信python实现
串口通信python实现一、什么是串口通信?串口通信是指通过串口接口实现的数据传输过程。
串口是计算机与外部设备之间的一种通信接口,它可以通过一根线(或多根线)进行数据传输。
在计算机系统中,串口是指一个标准的RS-232C接口,它可以连接各种外部设备,如打印机、调制解调器、传感器等。
二、为什么要使用Python实现串口通信?Python是一种高级编程语言,具有简单易学、易于阅读和编写、可移植性强等优点。
同时,Python还具有丰富的库和模块,可以方便地实现各种功能。
因此,在进行串口通信时,使用Python可以简化开发过程,并且提高开发效率。
三、如何在Python中实现串口通信?1. 安装pySerial模块pySerial是一个用于访问计算机上的串行端口的Python模块。
在使用pySerial之前需要先安装该模块。
可以通过pip命令进行安装:```pip install pyserial```2. 打开串口打开一个可用的串行端口需要指定端口号和波特率等参数。
例如:```pythonimport serialser = serial.Serial('COM1', 9600, timeout=0.5)```其中,'COM1'是串口号,9600是波特率,timeout是读取数据的超时时间。
3. 发送数据发送数据可以使用serial模块的write方法。
例如:```pythonser.write(b'Hello, world!')```其中,b'Hello, world!'是要发送的数据。
4. 接收数据接收数据可以使用serial模块的read方法。
例如:```pythondata = ser.read(10)```其中,10表示要读取的字节数。
5. 关闭串口使用完串口后需要关闭它,以释放资源。
可以使用serial模块的close 方法。
例如:```pythonser.close()```四、Python实现串口通信的示例代码下面是一个简单的Python示例代码,用于向串口发送数据,并从串口接收数据:```pythonimport serialser = serial.Serial('COM1', 9600, timeout=0.5)ser.write(b'Hello, world!')data = ser.read(10)print(data)ser.close()```在该示例代码中,首先打开了一个名为COM1的串口,并设置波特率为9600和读取超时时间为0.5秒。
Processing和Arduino互相通讯的方法
北边颇有心气儿的哥们我这是比Байду номын сангаас偷懒的做法其实也可以手动编译需要的视频库放进去但你需要懂一点java
Processing和 Arduino互相通讯的方法
在进行互动装置艺术作品的创作过程中,经常需要【软件+硬件】之间传递数据,方法如下。
我们需要创建两个文件:Receiver.pde(软件端)+ Sender.ino(硬件端)
2、硬件端
第一步:初始化串口 Serial.begin(9600);
第二步:读取传感器信号 val = analogRead(0); Serial.write(val);
然后,将 Sender.ino 烧入Arduino,在打开Processing。 如果一切正常,在Processing端就可以看见Arduino传感器的信号了。
1、软件端
第1步:引用串口通讯库 import processing.serial.*; Serial port;
第2步:初始化通讯端口,例如:COM18 端口查询:设备管理器 - 端口 (COM 和 LPT)
port = new Serial(this, "COM18", 9600);
第3步:读取端口数据 println(port.read());
串行口通信技术相关书籍

串行口通信技术相关书籍Serial communication technology, also known as serial port communication, is a method of transferring data one bit at a time. It is widely used in various applications such as computer networking, industrial automation, and telecommunications. For those who are interested in learning more about serial communication technology, there are many books available on the subject.串行通信技术,也被称为串行口通信,是一种逐位传输数据的方法。
它在各种应用中被广泛使用,如计算机网络、工业自动化和电信。
对于那些有兴趣了解更多关于串行通信技术的人来说,有许多相关书籍可供选择。
One highly recommended book is "Serial Port Complete" by Jan Axelson. This comprehensive guide covers everything from the basics of serial communication to more advanced topics such as USB connectivity and serial device drivers. It is a valuable resource for both beginners and experienced professionals in the field.一本备受推荐的书籍是詹·阿克塞尔森(Jan Axelson)撰写的《串行端口完全手册》。
串口中断接收的流程
串口中断接收的流程英文回答:Serial port interrupt reception is a process that allows the microcontroller to receive data from the serial port without continuously polling for new data. This is especially useful when the microcontroller needs to perform other tasks while waiting for incoming data.The flow of serial port interrupt reception typically involves the following steps:1. Enable the serial port interrupt: This step involves configuring the microcontroller to enable the interrupt for the specific serial port being used. This is usually done by setting appropriate bits in the interrupt enable register.2. Configure the serial port: Before enabling the interrupt, the serial port needs to be properly configuredfor the desired transmission parameters such as baud rate, data bits, parity, and stop bits. This is typically done by setting the appropriate control registers of the serial port.3. Set up the interrupt service routine (ISR): An ISRis a function that is executed when the interrupt occurs. In this case, the ISR for the serial port interrupt should be set up to handle the received data. The ISR should read the received data from the serial port's receive buffer and process it accordingly.4. Enable global interrupts: Before the microcontroller can respond to any interrupts, the global interrupt flag must be enabled. This is usually done by setting the appropriate bit in the microcontroller's control register.5. Wait for the interrupt: Once the serial port interrupt is enabled and the global interrupts are enabled, the microcontroller can wait for the interrupt to occur. This allows the microcontroller to perform other tasks while waiting for incoming data.6. Process the received data: When the interrupt occurs, the microcontroller jumps to the ISR and starts executing the code within the ISR. The ISR should read the received data from the serial port's receive buffer and process it accordingly. This may involve storing the data in a buffer, performing calculations, or triggering other actions based on the received data.7. Clear the interrupt flag: After processing the received data, it is important to clear the interrupt flagto acknowledge that the interrupt has been handled. This is usually done by clearing the appropriate bit in theinterrupt flag register.8. Return from the ISR: Once the interrupt flag is cleared, the microcontroller can return from the ISR and continue executing the main program.Overall, the flow of serial port interrupt reception involves enabling the interrupt, configuring the serial port, setting up the ISR, enabling global interrupts,waiting for the interrupt, processing the received data, clearing the interrupt flag, and returning from the ISR.中文回答:串口中断接收是一种允许微控制器从串口接收数据而无需持续轮询新数据的过程。
基于摄像头的手势控制小车

基于摄像头的⼿势控制⼩车⽤⼿势控制⼩车,⼤家往往喜欢⽤加速度传感器来实现。
最简单的做法莫过于在⼿机上装⼀个App,这个App能检测⼿机的运动⽅向,然后转化为控制信息发给⼩车。
⽽我总是希望⽤⼀种更加有趣,更加⾃然的⽅式去控制⼩车。
微软的Kinect出来后,就有专家写了⼀本书《⽤最⾃然的⽅式与机器对话》。
的确,在Kinect的⽀持下,⼿势控制变得⾮常简单,其互动游戏很受⼈欢迎。
但对于⼿势识别来说,Kinect 并不是唯⼀的选择,⽤普通摄像头我们也能够实现。
Kinect互动游戏⼀、原理分析在上⼀期的⽂章中,我们已经⼤致体验了Processing 的功能。
作为⼀款以互动为特⾊的开源编程语⾔,Processing拥有⼤量的扩展库,并且提供了各种具体的应⽤范例。
其中视频库⽀持外部摄像头,可以实时获取视频画⾯中的每⼀个像素点,并进⾏分析。
在有效的算法⽀持下,我们也可以做到图像分割、物体识别、⼈脸识别、动作识别、运动跟踪等。
同时,Processing⽀持串⼝编程,可以通过串⼝和外部设备(如Arduino)通讯。
这些类似的应⽤,在Processing范例库中都能够找到,技术门槛并不⾼。
⽤⼿势控制⼩车这个作品的运⾏原理如下图。
⼯作原理图⽰当然,由于我们使⽤的是普通摄像头,当然做不到如Kinect的动作识别效果。
虽然从理论上说,Processing也实时识别出⼈的⼿势,但是算法⾮常复杂,不是我们中⼩学的学⽣能够理解。
所以,我试着⽤另⼀种简单的⽅式去做,即让⼩车的操控者带上⼀个特殊颜⾊的⼿套,或者⼿上拿⼀个特定颜⾊的LED灯,Processing对视频⾯⾯的像素点进⾏遍历,找到这⼀颜⾊后,根据座标对⼩车发出控制信息。
简单的说,就是实现⼀个能够捕捉视频中特定颜⾊的程序。
视频中特定颜⾊和控制信息的关系如图所⽰,其中画出⼩矩形的表⽰识别出来的颜⾊。
按照这样的⽅式定义“上、下、左、右”的控制信息,⽐较容易,也⽐较好理解。
但是,如果坐标在左上⾓该怎么处理?如图所⽰。
C语言实现串口通信
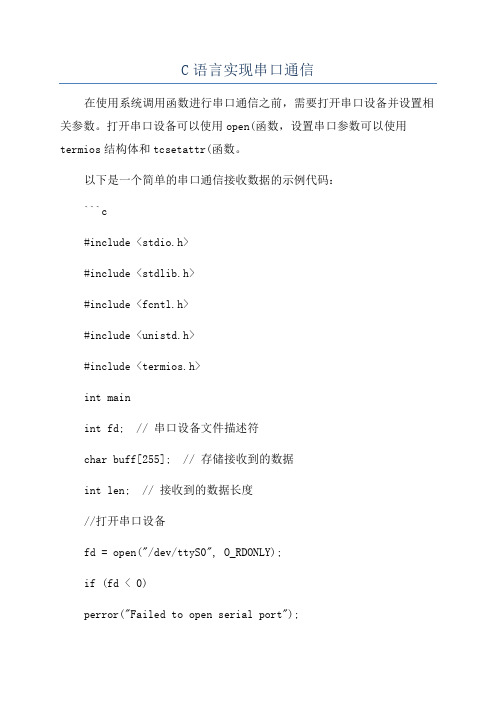
C语言实现串口通信在使用系统调用函数进行串口通信之前,需要打开串口设备并设置相关参数。
打开串口设备可以使用open(函数,设置串口参数可以使用termios结构体和tcsetattr(函数。
以下是一个简单的串口通信接收数据的示例代码:```c#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>int mainint fd; // 串口设备文件描述符char buff[255]; // 存储接收到的数据int len; // 接收到的数据长度//打开串口设备fd = open("/dev/ttyS0", O_RDONLY);if (fd < 0)perror("Failed to open serial port");return -1;}//设置串口参数struct termios options;tcgetattr(fd, &options);cfsetspeed(&options, B1200); // 设置波特率为1200 tcsetattr(fd, TCSANOW, &options);//接收数据while (1)len = read(fd, buff, sizeof(buff)); // 从串口读取数据if (len > 0)buff[len] = '\0'; // 将接收到的数据转为字符串printf("Received data: %s\n", buff);}}//关闭串口设备close(fd);return 0;```这段代码首先通过open(函数打开串口设备文件"/dev/ttyS0",然后使用tcgetattr(函数获取当前设置的串口参数,接着使用cfsetspeed(函数设置波特率为1200,最后使用tcsetattr(函数将设置好的串口参数写回。
stm32多任务多数据串口接收及处理方法
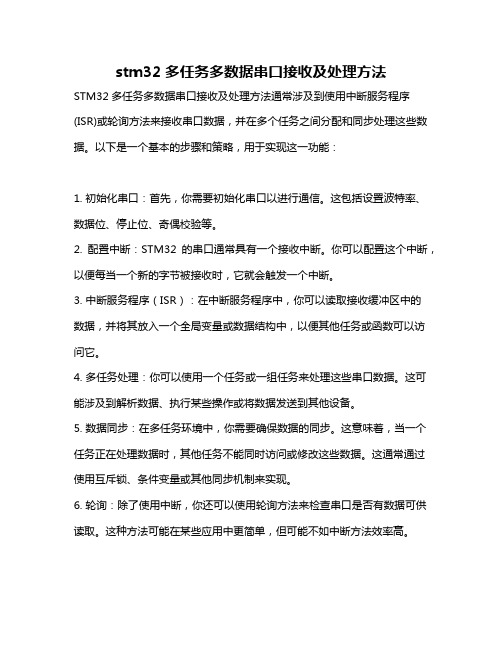
stm32多任务多数据串口接收及处理方法STM32多任务多数据串口接收及处理方法通常涉及到使用中断服务程序(ISR)或轮询方法来接收串口数据,并在多个任务之间分配和同步处理这些数据。
以下是一个基本的步骤和策略,用于实现这一功能:1. 初始化串口:首先,你需要初始化串口以进行通信。
这包括设置波特率、数据位、停止位、奇偶校验等。
2. 配置中断:STM32的串口通常具有一个接收中断。
你可以配置这个中断,以便每当一个新的字节被接收时,它就会触发一个中断。
3. 中断服务程序(ISR):在中断服务程序中,你可以读取接收缓冲区中的数据,并将其放入一个全局变量或数据结构中,以便其他任务或函数可以访问它。
4. 多任务处理:你可以使用一个任务或一组任务来处理这些串口数据。
这可能涉及到解析数据、执行某些操作或将数据发送到其他设备。
5. 数据同步:在多任务环境中,你需要确保数据的同步。
这意味着,当一个任务正在处理数据时,其他任务不能同时访问或修改这些数据。
这通常通过使用互斥锁、条件变量或其他同步机制来实现。
6. 轮询:除了使用中断,你还可以使用轮询方法来检查串口是否有数据可供读取。
这种方法可能在某些应用中更简单,但可能不如中断方法效率高。
7. 错误处理:不要忘记在代码中包含错误处理逻辑。
这可能包括检查读取的数据是否完整、是否有任何传输错误等。
8. 优化:对于高性能应用,你可能还需要考虑其他优化策略,如非阻塞读取、缓冲区管理、流量控制等。
以上只是一个基本的框架,具体的实现细节将取决于你的具体需求和STM32的具体型号。
建议查阅STM32的参考手册和相关文档以获取更详细的信息和示例代码。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
g的串口通讯
通过串口,可以读写,双向通讯。
系统范例
学习系统自带的范 例:
File-examples
关键语句分析
引用库:
import processing.serial.*; Serial myPort; String portName = Serial.list()[0]; myPort = new Serial(this, portName, 9600);
练习:
基础:做一个文字型的电子钟; 进阶:做一个文字加现状的电子钟。
范例1中arduino的代码
int switchPin = 4; // Switch connected to pin 4 void setup() { pinMode(switchPin, INPUT); // Set pin 0 as an input Serial.begin(9600); } void loop() { if (digitalRead(switchPin) == HIGH) { // If switch is ON, Serial.print(1, BYTE); // send 1 to Processing } else { // If the switch is not ON, Serial.print(0, BYTE); // send 0 to Processing } delay(100); // Wait 100 milliseconds }
定义变量
连接指定串口
关键语句分析
判断串口是否有数据
myPort.available() > 0 val = myPort.read(); myPort.write('H');
获取串口数据
输出串口数据
范例1:
import processing.serial.*; Serial myPort; // Create object from Serial class int val; // Data received from the serial port void setup() { size(200, 200); String portName = Serial.list()[0]; myPort = new Serial(this, portName, 9600); } void draw() { if ( myPort.available() > 0) { // If data is available, val = myPort.read(); // read it and store it in val } background(255); // Set background to white if (val == 0) { // If the serial value is 0, fill(0); // set fill to black } else { // If the serial value is not 0, fill(204); // set fill to light gray } rect(50, 50, 100, 100); }