转子动力学优化设计
高速永磁同步电机电磁分析与转子动力学研究

高速永磁同步电机电磁分析与转子动力学研究1. 本文概述本文旨在深入研究高速永磁同步电机(PMSM)的电磁分析与转子动力学特性。
随着现代工业技术的发展,高速永磁同步电机以其高效率、高功率密度和良好的调速性能,在航空航天、机床工具、新能源发电等领域得到了广泛应用。
对高速永磁同步电机进行深入的电磁分析和转子动力学研究,对于优化电机设计、提高电机性能、拓宽应用领域具有重要意义。
本文将首先介绍高速永磁同步电机的基本结构和工作原理,为后续分析提供理论基础。
随后,文章将重点围绕电磁分析展开,包括电机绕组设计、磁路分析、电磁场计算等方面,以揭示电机内部电磁过程的本质规律。
在此基础上,本文将进一步探讨高速永磁同步电机的转子动力学特性,包括转子动力学模型建立、模态分析、振动噪声控制等内容,以揭示电机在高速运行过程中的动态响应和稳定性问题。
本文将对高速永磁同步电机的电磁分析与转子动力学研究进行总结,归纳出电机设计优化的关键因素,为未来的电机研发和应用提供有益的参考。
通过本文的研究,期望能为高速永磁同步电机的技术进步和产业发展做出一定的贡献。
2. 高速永磁同步电机的基本理论高速永磁同步电机(HighSpeed Permanent Magnet Synchronous Machine, HSPMSM)是一种广泛应用于航空航天、高速列车、风力发电等领域的电机。
其基本工作原理基于电磁感应定律和洛伦兹力定律。
在电机中,通过在转子上安装永磁体和在定子上布置三相绕组,当三相交流电通过绕组时,产生旋转磁场。
这个旋转磁场与永磁体的磁场相互作用,产生转矩,驱动转子旋转。
电磁场的分析是理解HSPMSM运行特性的关键。
主要分析内容包括磁场的分布、磁通量的路径以及电磁力的大小和方向。
这些分析通常基于麦克斯韦方程组,通过有限元分析(Finite Element Analysis, FEA)等数值方法进行。
通过电磁场分析,可以准确预测电机的电磁性能,如转矩、反电动势和效率。
电动机制造中的电机转子动力学分析考核试卷
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
1.电机转子在高速运转时,轴承的摩擦力对振动影响较小。()
2.电机转子的临界转速越高,其工作转速范围就越宽。()
3.转子的质量分布均匀时,不会产生不平衡。()
B.滑动轴承
C.气浮轴承
D.磁浮轴承
14.在电机转子动力学分析中,以下哪些方法可以用来评估转子的稳定性?()
A.线性稳定性分析
B.非线性稳定性分析
C.疲劳分析
D.振动分析
15.下列哪些措施可以减小电机转子在运输和安装过程中的损伤?()
A.使用防震包装
B.严格控制安装工艺
C.增加转子材Leabharlann 的硬度D.避免在临界转速附近操作
A.材料密度不均匀
B.加工误差
C.装配不当
D.轴承磨损
9.下列哪些情况可能导致电机转子产生耦合振动?()
A.转子与定子间的电磁力
B.转子与轴承间的相互作用
C.多级转子间的相互作用
D.外界环境的变化
10.在进行电机转子模态分析时,以下哪些参数是重要的?()
A.转子的质量
B.转子的刚度
C.转子的阻尼
D.电机的工作温度
D.电机的温度
3.下列哪些方法可以改善电机转子的动力学特性?()
A.调整轴承间隙
B.改善转子的质量分布
C.增加转子的质量
D.提高轴承的刚度
4.电机转子的一阶弯曲振动包括以下哪些部分?()
A.轴向振动
B.弯曲振动
C.扭转振动
D.纵向振动
5.下列哪些因素会影响电机转子的临界转速?()
ansys 转子动力学 不平衡质量
ansys 转子动力学不平衡质量ANSYS转子动力学是一种用于分析旋转机械系统中不平衡质量的工具。
不平衡质量是指在旋转机械系统中存在的质量分布不均匀的情况,它会导致系统产生不平衡力和振动。
不平衡质量在旋转机械系统中的影响是非常重要的,它会引起系统的振动、噪声和磨损,甚至会导致系统的故障和损坏。
因此,对不平衡质量进行准确的分析和评估是非常重要的。
ANSYS转子动力学可以通过以下步骤进行不平衡质量的分析:1. 建立转子模型:首先,需要根据实际情况建立旋转机械系统的几何模型。
这个模型可以包括转子、轴承、轴承座、连接件等各个组成部分。
2. 定义转子材料和属性:根据实际情况,需要定义转子的材料属性,例如弹性模量、密度等。
3. 定义转子的运动:需要定义转子的旋转速度和方向。
这个可以根据实际情况设置,例如转子的转速和转向。
4. 定义不平衡质量:需要定义转子上的不平衡质量分布。
这个可以根据实际情况设置,例如在转子上添加一定的质量块或者质量分布。
5. 进行转子动力学分析:使用ANSYS转子动力学工具进行分析。
工具会根据转子的几何模型、材料属性、运动和不平衡质量分布等信息,计算出转子的振动响应和不平衡力。
可以通过分析结果来评估不平衡质量对系统的影响。
6. 优化设计:根据分析结果,可以对转子的设计进行优化。
例如调整不平衡质量的位置和大小,以减小不平衡力和振动。
总之,ANSYS转子动力学是一种用于分析旋转机械系统中不平衡质量的工具,通过建立转子模型、定义转子的运动和不平衡质量分布等信息,可以计算出转子的振动响应和不平衡力,并进行优化设计。
转子动力学研究的回顾与展望

转子动力学研究的回顾与展望一、本文概述转子动力学,作为机械工程和航空航天工程领域的一个重要分支,主要研究旋转机械系统中转子的运动特性和稳定性问题。
随着科技的不断进步和工业的快速发展,转子动力学的研究不仅在理论层面取得了显著的突破,更在实际应用中发挥了不可替代的作用。
本文旨在全面回顾转子动力学的发展历程,总结其研究现状,并在此基础上展望未来的研究方向和潜在的应用前景。
文章将首先回顾转子动力学的起源和发展历程,介绍其从早期的线性理论到现代的非线性、多体动力学理论的演变过程。
接着,本文将综述转子动力学的主要研究内容和方法,包括转子系统的建模、稳定性分析、振动控制等方面,并重点分析当前研究的热点和难点。
在此基础上,文章将展望转子动力学未来的发展趋势,探讨新的理论方法和技术手段在转子动力学研究中的应用前景,以期为相关领域的研究人员和工程师提供有益的参考和启示。
二、转子动力学研究的回顾转子动力学,作为机械工程和航空航天领域的重要分支,其研究历史可追溯至19世纪末期。
自那时起,科学家们就开始了对旋转机械中转子行为特性的探索,以优化其性能并减少故障。
在20世纪早期,转子动力学主要关注转子的平衡问题,即如何通过设计和加工消除不平衡引起的振动。
随着工业技术的进步,转子的尺寸和速度不断增加,其动力学行为变得更为复杂。
因此,研究者开始关注转子的临界转速、稳定性以及振动控制等问题。
到了20世纪中后期,随着计算机技术的飞速发展,转子动力学的研究方法发生了革命性的变化。
数值分析、有限元法等计算方法的引入,使得研究者能够更准确地模拟和分析转子的动态行为。
同时,实验技术的进步也为转子动力学研究提供了更多手段。
进入21世纪,转子动力学的研究领域进一步拓宽。
除了传统的旋转机械外,还涉及到了风力发电机、燃气轮机、航空发动机等新型旋转机械。
随着对非线性动力学、混沌理论等的研究深入,转子动力学的理论体系也在不断完善和丰富。
回顾转子动力学的发展历程,我们可以看到其从简单的平衡问题发展到复杂的动力学行为分析,从单一的实验手段发展到多元化的研究方法。
鼠笼弹支轴承外圈优化设计及其性能分析
摘要:建立某鼠笼弹支轴承外圈有限元模型对其刚度进行计算,通过试验验证了其正确性。
以肋条厚度、肋条宽度、肋条数量、肋条长度和过渡圆角半径为设计变量,以鼠笼肋条圆角处最大应力值最小为优化目标,以转子动力学临界转速对应的变形为约束,对鼠笼弹支外圈进行优化设计。
并基于Romax建立未考虑和考虑柔性的鼠笼弹支轴承分析模型,对其进行性能分析,结果表明:考虑柔性时轴承载荷分布比未考虑柔性时更均匀,寿命更高,更接近实际工况。
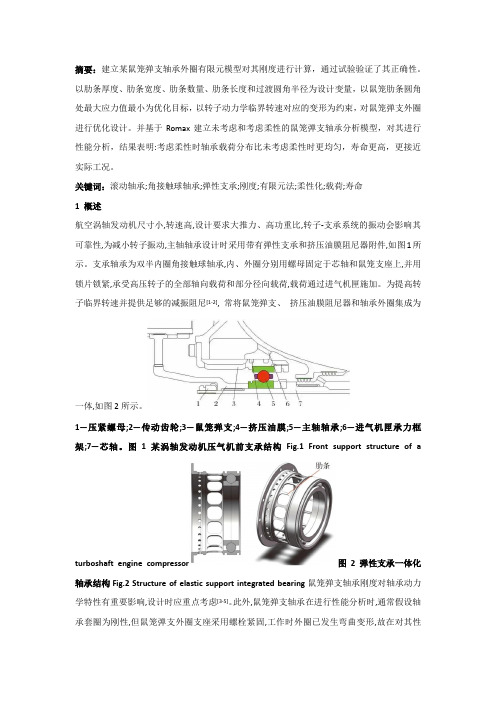
关键词:滚动轴承;角接触球轴承;弹性支承;刚度;有限元法;柔性化;载荷;寿命1 概述航空涡轴发动机尺寸小,转速高,设计要求大推力、高功重比,转子-支承系统的振动会影响其可靠性,为减小转子振动,主轴轴承设计时采用带有弹性支承和挤压油膜阻尼器附件,如图1所示。
支承轴承为双半内圈角接触球轴承,内、外圈分别用螺母固定于芯轴和鼠笼支座上,并用锁片锁紧,承受高压转子的全部轴向载荷和部分径向载荷,载荷通过进气机匣施加。
为提高转子临界转速并提供足够的减振阻尼[1-2], 常将鼠笼弹支、挤压油膜阻尼器和轴承外圈集成为一体,如图2所示。
1—压紧螺母;2—传动齿轮;3—鼠笼弹支;4—挤压油膜;5—主轴轴承;6—进气机匣承力框架;7—芯轴。
图 1 某涡轴发动机压气机前支承结构Fig.1 Front support structure of aturboshaft engine compressor图2 弹性支承一体化轴承结构Fig.2 Structure of elastic support integrated bearing鼠笼弹支轴承刚度对轴承动力学特性有重要影响,设计时应重点考虑[3-5]。
此外,鼠笼弹支轴承在进行性能分析时,通常假设轴承套圈为刚性,但鼠笼弹支外圈支座采用螺栓紧固,工作时外圈已发生弯曲变形,故在对其性能进行分析时应考虑外圈柔性的影响[6-8]。
本文以某发动机支点鼠笼弹支轴承为研究对象,建立了鼠笼弹支外圈刚度计算有限元模型,根据其刚度对鼠笼结构参数进行优化设计,并考虑套圈柔性对鼠笼弹支轴承进行性能分析。
锤片式粉碎机转子结构动态优化设计
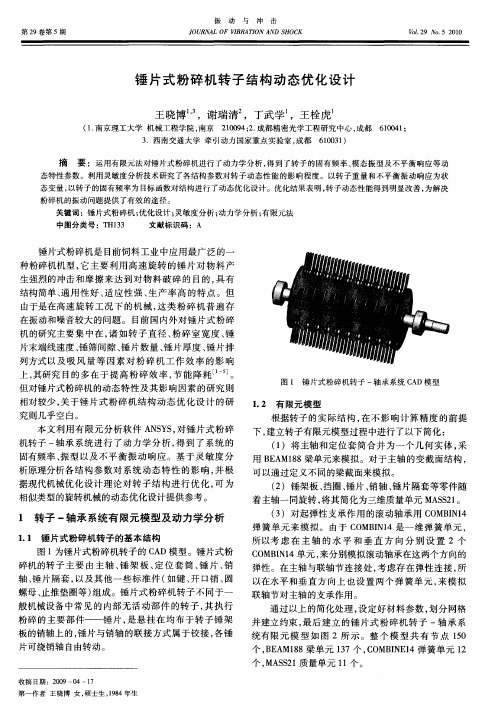
弹性。在主轴与联轴节连接处 , 考虑存在弹性连接 , 所 以在水 平和 垂 直 方 向上 也 设 置 两个 弹 簧单 元 , 模 拟 来 联轴节对主轴的支承作用 。
通 过 以上 的简化 处理 , 定 好材 料参 数 , 分 网格 设 划 并 建立 约束 , 后建 立 的锤 片 式 粉碎 机 转 子 一轴 承 系 最
中图 分 类 号 :T 3 H13 文 献 标识 码 :A
锤 片式粉 碎机是 目前 饲 料工 业 中应 用 最广 泛 的一
种粉碎 机机 型 , 主要 利 用 高 速 旋转 的锤 片对 物 料 产 它 生强烈 的冲击 和 摩 擦 来 达 到对 物 料 破 碎 的 目的 , 有 具 结 构简单 、 通用 性 好 、 应 性 强 、 产 率 高 的 特 点 。但 适 生 由于是 在高速 旋 转 工 况 下 的机 械 , 类 粉 碎 机 普 遍 存 这
在 振动 和噪音较 大 的问题 。 目前 国 内外对 锤 片 式粉 碎
机 的研究 主要 集 中 在 , 如转 子 直径 、 碎 室 宽 度 、 诸 粉 锤 片末 端线速 度 、 筛间 隙 、 片 数量 、 片 厚度 、 片 排 锤 锤 锤 锤 列方 式 以及 吸风 量 等 因 素 对 粉 碎 机 工 作 效 率 的影 响 上 , 研究 目的 多 在 于 提 高 粉 碎 效 率 , 能 降耗 _ J 其 节 l 。 但对锤 片式 粉碎机 的动 态特 性及 其 影 响 因素 的研 究则
18 4
振 动 与 冲 击
21 00年第 2 9卷
上述模ቤተ መጻሕፍቲ ባይዱ进行分析求解 , 即可得到 了转子的各 阶固有
频率 ( 表 1 和模 态 振 型 ( 图 3 为了保证机器安 见 ) 如 ) 全 运行和 正 常工 作 , 机 械设 计 中应 使 旋 转轴 的工 作 在
某型舰船用转子系统动力学性能分析

某型舰船用转子系统动力学性能分析转子系统是一种被广泛应用于某型舰船中的动力学系统,通过转动多个旋转翼来产生推力,以实现舰船的运动和控制。
在分析某型舰船用转子系统的动力学性能时,需要考虑多个方面因素,并将它们进行综合评估,以便制定出合理的优化方案。
首先,需要考虑的是转子系统的推力与功率比。
舰船用转子系统通过旋转产生推力,推力越大,则需要的功率也越大。
因此,在选择旋翼参数及马达额定功率时,需要综合考虑其推力与功率比,以获得尽量高的效率。
此外,还需要考虑旋翼的尺寸、数目、叶片的形状和数量等多个参数的综合作用,以确保输出的推力足够,同时满足舰船受力条件和空间约束条件。
其次,需要考虑的是转子系统的稳定性和控制性能。
舰船用转子系统需要能够保持稳定状态,并能够在需要时进行精确的调整和控制。
因此,在设计转子系统时,需要充分考虑其受到的舵和风的影响,以及船体姿态和速度对其稳定性的影响。
同时,还需要配备合适的控制系统,以便在任何情况下都能够对转子系统进行快速精确的调整。
第三,需要考虑的是转子系统的可靠性和性能稳定性。
舰船用转子系统需要在恶劣环境下连续运行数小时,同时还需要经受大量的机械和热力学应力。
因此,在选择组件和材料时,需要考虑其可靠性和耐用性,并制定合理的维护和保养方案,以确保其性能始终稳定而可靠。
最后,需要综合考虑各方面的因素,在设计转子系统时制定出合理的优化方案。
在设计过程中需要首先明确各项技术指标的要求,然后选择合适的设计方案。
在具体设计中需要进行系统性能仿真,以保证系统设计的可靠性和优良的性能,同时也能够确定最终的系统参数。
在新系统投入使用后,需要时刻关注其性能状况,并及时调整和维护,以确保其性能始终处于最佳状态。
总之,某型舰船用转子系统的动力学性能分析是一项复杂的工作,需要综合考虑多方面因素。
通过合理的设计和优化方案,可以实现转子系统的高效稳定操作,并确保其符合舰船需要的各种性能指标,以更好地服役于海军事业。
转子动力学研究方向综述
转子动力学研究方向综述(上海大学机电工程与自动化学院,上海200072)摘要:旋转机械被广泛地应用于包括燃气轮机,航空发动机,工业压缩机及各种电动机等机械装置中。
转子动力学是研究所有与旋转机械转子及其部件和结构有关的动力学特性,包括动态响应、振动、强度、疲劳、稳定性、可靠性、状态监测、故障诊断和控制的学科。
本文回顾了转子动力学的发展历史,分析了研究转子动力学面临的几个主要问题。
总结了国内外在转子平衡技术方面、转子系统振动控制技术方面、转子动力学设计方面、转子振动噪声和参数识别方面、转子的动力学特性方面研究的情况。
最后讨论了我国转子动力学面临的主要问题。
关键词:转子;动力学;旋转机械Review of Researches Direction on Rotor DynamicsGAO hai-zhou(School of Mechanical Engineering and Automation, Shanghai University, Shanghai 200072, China)Abstract: Rotating machinery is widely applied to include gas turbine, aviation engine, industrial compressor and all kinds of motor and other machinery. Rotor dynamics is the study of all to the rotor of the rotating machinery and its components and structure dynamic characteristics, including dynamic response, vibration, strength, fatigue, stability, reliability and condition monitoring, fault diagnosis and control subjects. This paper reviews the development history of rotor dynamics, analyses several main problems in the study of rotor dynamics. In rotor balancing technology at home and abroad are summarized, the rotor system vibration control technology, the rotor dynamics design, rotor vibration noise and parameter identification, rotor dynamic aspects of the research. Finally discusses the major problems of rotor dynamics in ChinaKey words: rotor; dynamics; rotary machine引言旋转机械[1]被广泛地应用于包括燃气轮机,航空发动机,工业压缩机及各种电动机等机械装置中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A C 0 0
B D 0 E
0 0 A C
0 - E B D
R 1 / C 2i R 2 / C 2i I 1/ C 2i
0 = I 2i 0 ( 8)
5 应用与结论
通过多个模型算例、 实验模型及航空发动机压气机转子的优化设计与运行考验, 证明本方 法完全适用于多转子多支承系统的转子动力学优化设计。采用传递矩阵—拟模态综合法对转 子支承系统作转子动力学优化设计是行之有效、 简捷的途径。 拟模态综合法使复杂系统化为若 干子系统, 大大缩减自由度 ; 又将待优化的参数作为边界坐标处理 , 使灵敏度分析、 优化迭代过 程大为简化。 约束子系统采用改进的传递矩阵法既可分析约束振动模态 , 又可分析约束静位移 模态, 两者相结合充分发挥各自长处。对中小型涡轮涡桨发动机的高速转子系统 , 采用支承刚 度与阻尼优化设计方法 , 可以有效地调整临界转速, 保证在全工作转速范围内平稳运行。本文 所提出的方法 , 不仅适用于各类航空发动机的转子支承系统, 也可推广应用于各类高速转子系 统的转子动力学优化设计。 参 考 文 献
4 支承阻尼优化设计
支承阻尼优化的目的在于获得整个工作转速范围内最小的振动响应 , 优化目标函数可取 总的平均振动烈度或最大位移振幅, 也可用于外传力作为优化目标函数。
N M
R=
j= 1 i= 1
Z2 ij
( 5) ( 6) ( 7)
R * = M ax ( Zij ) i = 1, M ; j = 1, N
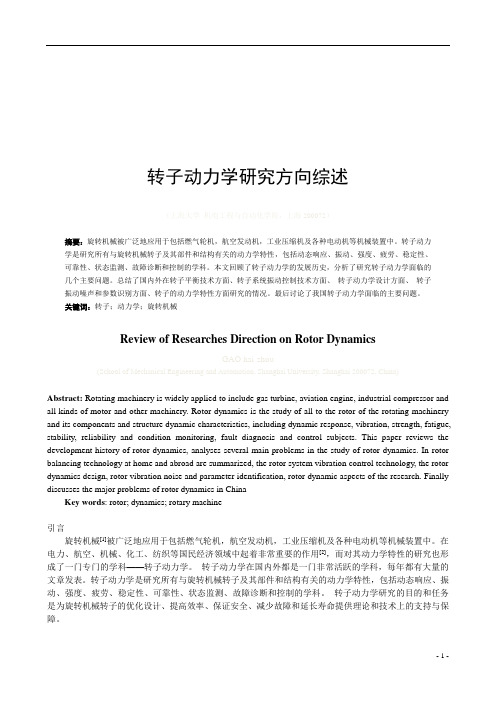
图 3 双转子系统示例图
分别落入第一与第二频率禁区内 , 故需优化设计各支承刚度以调整其临界转速。 由灵敏度分析 确定第Ⅳ支点上的支承刚度灵敏度最高 , 经优化迭代后 K Ⅳ = 632246N/ m , c1 = 127. 6rad/ s, 离开第一频率禁区。 进一步对二阶临界转速进行调整 , 当 K 1Ⅴ = 339000N/ m 时, 转子支承系统 各阶临界转速为: c1 = 96. 70r ad/ s, c 2 = 511. 65rad/ s, c 3 = 799. 65rad/ s, 皆离 开两个频率禁 区。进一步需对外转子同步的临界转速进行检查, 如落入禁区则再进行支承刚度的重新优化。 如此反复迭代直到完全满足要求为止。
2 t 1 2 t
( 1)
B D 0 E
0 0 A C
2 n 2
0 - E B D
1 M1 t 2 M ± 1
R1 R2 = I1 I2
Q1 Q2 Q1
I I
R R
( 3)
t t M1 ± 1 C g1 + ( t 2 t C g1 , D = M1 -
Q2 c C g1 ) , B= t
C g1 ±
N K
R =
j= 1 i= 1
′
F2 ijБайду номын сангаас
式中: Z ij 为第 j 阶振动模态时各 i 坐标的速度幅值; Z ij 为第 j 阶振动模态时各 i 坐标的位移幅 值 ; F ij 为第 j 阶振动模态时各 i 支承的外传力; N 为模态数; M 为坐标数; K 为支承数。 * ′ 优化目标是使目标函数达最小值 , 即 min R 、 m in R 或 min R 。 外传力与振动烈度或位移振幅存在一定的内在关系 , 在一定的支承刚度值下 , 增大阻尼系 数可减小振动, 也减小外传力; 但当阻尼系数增大过多时, 振幅不成比例下降, 外传力反而增 大。因此, 在保证最小振动烈度或位移振幅与最小外传力的条件下 , 存在着最优阻尼系数值。 在阻尼优化设计中 , 同样必须作灵敏度分析。由 ( 3) 式可得第 i 阻尼器的灵敏度方程为 :
1 V an ce J M , Royal A C . High S peed R ot or D ynamics -an A ssess men t of C urren t Techn ol ogy f or Small Tu rboshaf t Engines . Journal of A ircraf t , 1975 2 M ul lem K M , M agge J . A N ew Concept for Crit ical Speed Cont rol . S A E 670347, 1967 3 Huang Taiping, Lu nd J W . T he T ransf er M at rix Component M ode Synt hesis f or Eigen solut ions of Rot or Sys tems . Journal of N anjing A eronau tical Ins ti tu te, 1988, 5( 1) 4 Huang T aiping . T he T ran sf er M at rix Impedance Coupl ing M et hod for t he Eigensolut ions of M ult i-Spool Rot or S yst ems. Tr ans act ion s of A SM E, Journal of V ibrat ion, A cous t ics, S t ress and R eliabili ty in Design , 1988, 110( 4) 5 苗兰森 , 黄太平 . 复杂转子系统支承阻尼优化设计 . 振动工程学报 , 1990, 3( 4)
第 9 卷 第 2 期 1994 年 4月
航空动力学报
Journal of Aerospace Power
Vo l. 9 No . 2 Apr . 1994
转子动力学优化设计
南京航空航天大学 黄太平
* *
罗贵火
【 摘要】 优化设计可以使转子 支承系统具有先天 优良的转子动力学 特性 , 优化支 承的刚度与阻尼 系数是使转子支承系统获得优良动力学特性 的有效途径。本文采用传递矩阵—拟模态综合法分析 转子支 承系统的 动力特性—临 界转速、 不平衡响 应以及对支 承动力参数 灵敏度分 析 , 进而 对支承 动力参数作优化设计。本文所提出的方法已经过算例 、 模型试验及工程应用的证实。 主题词 : 转子 动力学 优选设计 临界速度 刚度 阻尼
1993 年 6 月收到; 1993 年 8 月收到修改稿。 * * 南京航空航天大学二系 210016 图 1 典型的约束子系统
[ 3]
114
航
空 动
力
学
报
第 9 卷
Y1 = f 1( Y0, 0) = 0 Y M = f M ( Y 0 , 0, R 1, …R M - 1) = 0 M n = f M + 1 ( Y 0, 0, R 1, …R M ) = 0 Qn = f M + 2 ( Y 0, 0, R 1, …R M ) = 0 方程组 ( 1) 中包含了起始端的截面挠度 Y 0、 转角 0 、 各约束点的约束力 R 1, …… R M 共 M + 2 个 未知状态参数。各式中的函数关系 f 1 , ……f M + 2由子系统的结构所决定 , 即取决于轴段的几 何、 物理参数及其轮盘参数、 弹性支承参数、 轴段联接条件 , 并与子系统的旋转角频率有关。因 此 , 只要建立函数关系式, 便可求解 , 得到约束子系统的模态参数 , 即约束模态频率 c 与约束 模态振型 。利用方程组 ( 1) , 改写成非齐次方程, 即依次令 Y 1= 1, Y 2 = Y 3 = ……= Y M = 0; Y 2 = 1, Y 0 = Y 3 = ……= Y M = 0; ……并令自转与进动角频率皆为零, 便可求得相应的约束静位移 模态[ ] T 与刚度矩阵 K 。 2. 2 拟模态综合法 拟模态综合法是利用线性振动系统模态叠加原理而建立的一种近似计算方法。在求得子 系统的约束振动模态、 约束静位移模态后, 通过模态坐标变换 , 可导得 Y1 0 A 11 + B 11 B 12 = ( 2) Y 2 0 B 21 A 22 + B 22 式中各符号意义请参见文献 [ 3] 。 由( 2) 式可求得系统的模态频率及相应的模态振型, 经坐标反 变换, 便可求得物理坐标上的振型。利用( 2) 式的相应非齐次方程组, 引入不平衡力, 可用来求 解不平衡响应 [ 5] : A C 0 0 式中: A = M1 ± R2 、 I 1、
116
航
空 动
力
学
报
第 9 卷
R 2i I 2/ C 2i R I I T 阻尼优化设计的基本步骤: ( 1) 给定不平衡量 , 确定不平衡力的列阵[ QR 1 , Q2 , Q1 , Q 2] ; ( 2) 给定阻尼系数初值 , 在各频率下求模态响应 R 1、 R 2、 I 1、 I 2 , 并经坐标反变换求得物理坐标上的 振动 响应 Z ij 或 Zij 以及外传力 F ij ; ( 3) 根据 ( 5) 、 ( 6) 或 ( 7) 式求得目 * ′ 标函数 R 、 R 或 R , 如已满足最小值要求 , 优化设计完毕 , 否 则进行下一步 ; ( 4) 根据 ( 8) 式, 用坐标轮换法确定各阻尼器的 灵敏度 , 然后对灵敏度最高的阻尼器给出阻尼系数新值, 从第 2 步重新进行优化设计。 对图 3 所示双转子系统作阻尼优化设计 , 取初值 C 2i = 100N ・s/ m, 优化后, C Ⅰ = 974N ・s/ m, C Ⅱ = 838N ・s/ m 。目 标函数下降为初值的五分之一。实验表明, 在 C Ⅳ= 1000N ・ 图 4 阻尼系数对振动的影响 s/ m 时, 系统的过一阶临界转速时的振动最小。C Ⅱ 主要抑制 二阶临界转速 , 受实验条件限制, 未能验证。 图 4 为阻尼系数变化对转子支承系统振动的影响。
图 2 频率禁区及支承刚度对 ncr 的关系
第 2 期
转子动力学优化设计
115
支承刚度值。优化的目标函数表示为 :
N
W =